基于接收功率电平的三角质心近距离定位算法*
2016-06-13 08:45陆杨洁刘志勤柴林香
传感器与微系统 2016年3期
陆杨洁, 刘志勤, 杨 雷, 柴林香
(西南科技大学 计算机科学与技术学院, 四川 绵阳 621010)
基于接收功率电平的三角质心近距离定位算法*
陆杨洁, 刘志勤, 杨雷, 柴林香
(西南科技大学 计算机科学与技术学院, 四川 绵阳 621010)
摘要:针对无线传感器网络中近距离定位精度较低的问题,提出了一种基于接收功率电平(RPL)的免标定三角质心定位算法。该算法使用无线信号参数RPL代替传统接收信号强度指示(RSSI),应用于测距模型中,与传统三角质心定位模型相结合,从而达到降低测距误差、提高定位精度的目的。通过仿真实验,将基于RPL的三角质心定位算法与基于RSSI的三角质心定位算法进行对比,结果表明:在实验环境下,基于RPL的三角质心定位算法比基于RSSI的三角质心定位算法精度提高了59.02 %,定位精度有明显提升。
关键词:近距离定位; 接收功率电平; 定位; 三角质心定位算法; 无线传感器网络
0引言
传统无线定位方法很多,如到达时间(time of arrival,TOA)、到达时间差(time different of arrival,TDOA) 、 到达角(angle of arrival,AOA)、基于接收信号强度指示(received signal strength indication,RSS)的三边测量定位方法[1]、基于RSSI指纹标定方法[2]、基于相似度定位方法、基于核岭回归(KRR)定位方法[3]等。其中,TOA,TDOA,AOA三种方法对硬件要求较高;基于RSSI的三边测量定位方法、基于RSSI指纹标定方法、基于相似度定位方法定位精度较高,但依赖于定位环境,需要耗费大量人力采集标定数据,限制了这些方法的推广应用;基于核岭回归定位只需要节点之间的信号强度和物理坐标信息,学习信号强度与物理坐标的回归模型,并能在线动态更新模型参数,实现自适应免标定定位,但是依赖于多个节点。
目前,无线定位技术的两个研究方向:扩大定位覆盖范围和提高定位精度。蓝牙作为一种短距离的无线通信技术,发展成熟、价格便宜、 性价比高,并且已经成为移动设备上的标配。2010 年7月7日,蓝牙技术联盟宣布,正式采纳蓝牙4.0核心规范(Bluetooth Core Specification Version 4.0[4]),并启动对应的认证计划。蓝牙4.0工作在2.4 GHz ISM频段,并能够通过自适应调频技术避免与其他同频段信号发生串扰,具有超低功耗、 3 ms 低延迟、 超过100 m的通信距离等优点。蓝牙4.0相较于低版本蓝牙具有不需要配对、准确、功耗极低的新特性,具有更长传输距离、更大传输带宽的优势以及更广的覆盖面积、亚米级的误差等特点,颠覆了蓝牙无线技术的应用范畴,带来了更广阔的无线定位应用前景。
蓝牙4.0 标准规范提供了一些与位置估计相关的参数:RSSI值、链路质量(link quality,LQ)值、发送功率(transmit power level,TPL)、接收功率电平(received power level,RPL)[5]。RSSI值和距离之间存在着一定的类似于对数的对应关系,距离不同其RSSI 值不同。RSSI 值可以通过调用函数来获取,而RPL则是从RSSI间接通过信号传播模型转换得到的,RPL是最适合计算距离的[6]。
本文基于蓝牙4.0技术研究近距离定位问题,提出基于RPL的测距模型与三角质心定位模型结合的免标定定位算法,与基于RSSI的三角质心定位算法[7]进行对比,该算法能提高定位精度、降低定位复杂度以及成本。
本研究将RPL这个参数应用于定位算法。
1基于RPL的三角质心定位模型
1.1RPL的测距模型
对于蓝牙设备,RSSI值通常用于使发射功率最小化,以接收到满意的信噪比的信号。而基于接收功率的测距模型中,用于测量距离的参数是RPL,使用公式如式(1)所示

=PTX+GTX+GTR+40.2-10nlgd,
(1)
式中PRX为接收功率,dBm;PTX为发送功率,dBm;GRX和GTX为天线获增益(dBi);c为光速,3.0×108m/s;f为中心频率,2.44GHz;n为衰减因子,在自由空间为2 ;d为信标节点与目标节点直接的距离,m[8]。
RSSI是一个8位的整数,表示RPL是否黄金接收功率范围(goldenreceiverpowerrange,GRPR)内(GRPR被认为是一种理想接收功率范围 )。GRPR和RSSI在蓝牙规范中定义的关系如图1所示。
图1 蓝牙GRPRFig 1 Bluetooth GRPR
根据蓝牙规范,正或负的RSSI分别表示设备的RPL是高于还是低于GRPR,而零意味着RPL在GRPR内。因此,RSSI被作为RPL的参数,而不是估计距离的参数。RPL是由RSSI间接计算得到,它们的关系如图2所示。
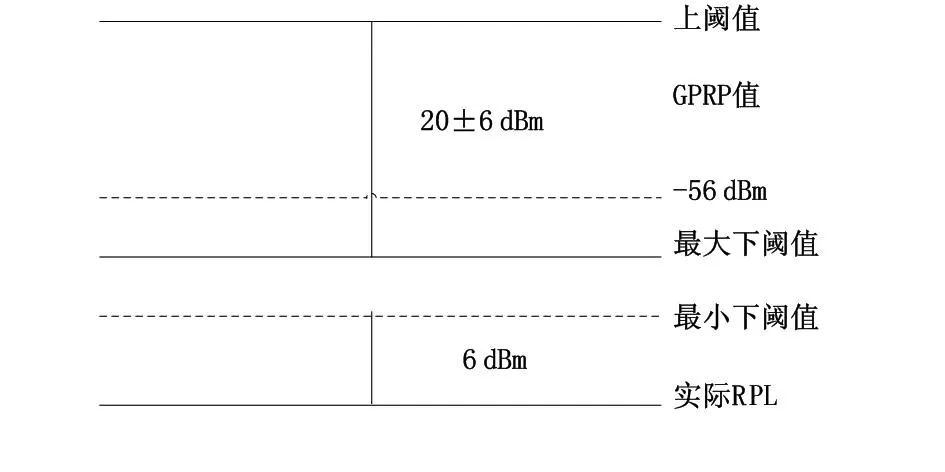
图2 RPL与RSSI关系图Fig 2 Relationship between RPL and RSSI
从图2可知,上限阈值PU=-40 dBm,下限阈值PL=-60 dBm,当RPL正好落在GRPR内,RSSI为0。RSSI与RPL的转换如式(2)所示
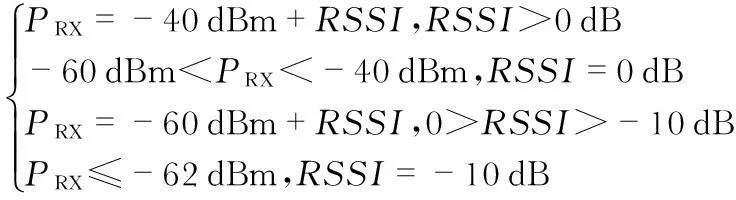
(2)
因此,信标节点与目标节点直接的距离d的计算方法如式(3)所示

(3)
其中,n取值2.15[8],PRX是由测得的RSSI值经过式(2)计算得出,天线增益[7]的和G =-5.34[8]如式(4)所示
G=GTX+GRX.
(4)
1.2三角质心定位算法模型
传统三边测量法如图3所示,三个已知信标节点的坐标分别为A(xA,yA),B(xB,yB),C(xC,yC),目标节点 M坐标假设为(x,y ),目标节点到各信标节点之间的距离分别为rA,rB,rC,它们的关系如式(5)所示
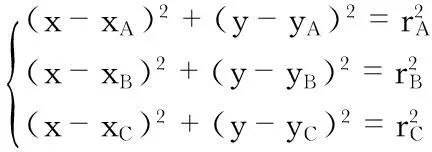
(5)
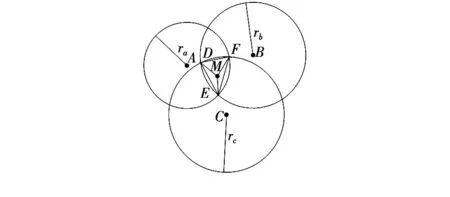
图3 三边测量法图示Fig 3 Trilateration measurement method illustration
因为实际环境的复杂性,测量得到的接收信号强度总与实际情况下有误差,换算出的信标节点到目标节点的距离r总是大于实际两点间的距离[9]。所以,三边测量法实际定位是以A,B ,C为圆心,rA,rB,rC为半径画圆,可得交叠区域,如图4所示。三角形质心定位算法的基本思想是:计算三圆交叠区域的3 个特征点的坐标,以这三个点为三角形的顶点,目标节点即为三角形质心,特征点为E,F,G,特征点E点的计算方法如式(6)所示
(6)
图4 三边测量法实际图示Fig 4 Practical illustration of trilateration measurement method
2基于RPL的定位算法过程
2.1步骤
1)信标节点向周围广播信息,信息包括设备MAC地址,目标节点接收信息时获取RSSI值,使用一阶滞后滤波器对获取到的RSSI进行滤波,如式(7)所示
RSSI=(1-α)·RSSI+α·RSSI′.
(7)
其中,α的取值范围为(0~1),取值0.8。
2)将滤波得到的RSSI转换为RPL,服务器计算目标节点在一定时间段内与信息来自同一信标节点之间的距离。
3) 在RPL值测距过程中,距离越近测距精度越高,RPL值越稳定越具有参考价值, 故将目标节点M 测到的所有d值从小到大进行排序,取最近的三个坐标点,依式(6)计算出3个交点的坐标,最后通过质心算法计算出目标节点的坐标。
2.2误差定义
假设计算得到目标节点的坐标为(x,y),真实坐标为(x0,y0),定义定位误差ER为

(8)
3实验仿真
为了验证本文提出方法的可行性,采用Matlab仿真工具进行模拟实验。假设在10m×10m的正方形区域,在四个角落分别放置固定节点,坐标分别为A(0,0),B(10,0),C(10,10),D(0,10),固定节点即是信标节点。随机产生10个目标节点。分别用基于RSSI的测距模型与基于RPL的测距模型进行测距仿真对比,以及基于RSSI的三角质心定位模型和基于RPL的三角质心定位模型进行定位仿真。
3.1测距模型对比实验
为了得到目标节点和信标节点之间的距离与RSSI值、RPL值的关系,采用统计均值校正模型[10],如式(9)所示
(9)
以1 m为测量间距,并且进行20次测量取其平均值,r0取值为0,n取值为2,方差取值1,所测得数据如表1所示。
将基于RSSI的测距方法、基于RPL的测距方法测试结果进行对比,如图6所示,基于RSSI的测距模型平均误差为1.58 m,基于RPL的测距模型平均误差为0.73 m,基于RPL的测距模型优于基于RSSI的测距模型。
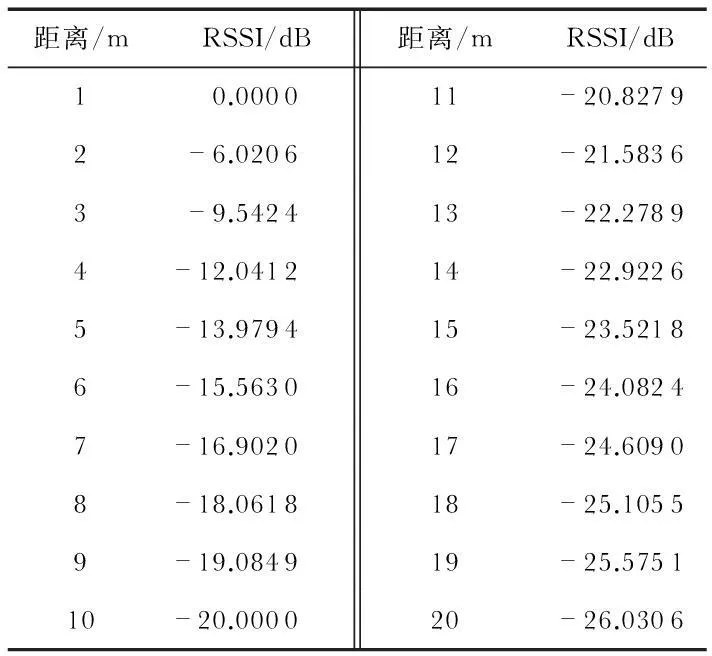
表1 仿真数据
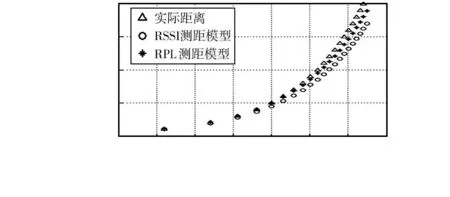
图5 测距模型对比图Fig 5 Ranging model comparison
3.2定位对比实验
随机生成10个点S1(2,3)m,S2(1,7)m,S3(3,5)m,S4(3,9)m,S5(5,5)m,S6(7,8)m,S7(8,6)m,S8(6,7)m,S9(9,5)m,S10(4,1)m,根据式(4)计算出目标节点与接入点之间的距离(n取2.15),分别选择目标节点到固定节点最近的三个固定节点进行定位,定位结果如图6所示。进行20次实验,基于RSSI的三角质心定位平均误差为0.61 m,基于RPL的三角质心定位平均误差为0.25 m。
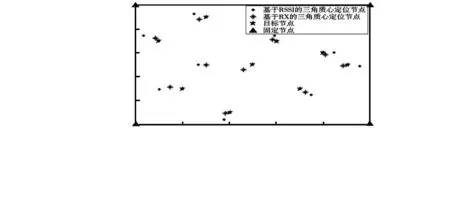
图6 定位结果对比图Fig 6 Positioning results comparison
4结束语
本文提出将基于RPL的测距模型与三角质心定位模型结合的免标定定位算法,实现高精度定位,避免复杂的人工标定过程,降低成本。通过仿真实验将算法与基于RSSI的三角质心定位算法进行比较,实验结果证明:本算法易实施,测距精度提高53.79 %,定位精度提高59.02 %。满足无线传感器网络近距离定位的低成本、精度高的要求。
参考文献:
[1]SubhanF,HasbullahH,RozyyevA,etal.IndoorpositioninginBluetoothnetworksusingfingerprintingandlaterationapproa-ch[C]∥2011InternationalConferenceonInformationScienceandApplications(ICISA),IEEE,2011:1-9.
[2]DiazJJM,R.MauesADe,SoaresRB,etal.Bluepass:Anindoorbluetooth-basedlocalizationsystemformobileapplicat-ion[C]∥IEEESymposiumonComputersandCommunications,2010:778-783.
[3]江德祥,胡明清,陈益强,等.基于核岭回归的自适应蓝牙定位方法[J].计算机应用研究,2010,27(9):3487-3489,3492.
[4]SpecificationoftheBluetoothSystem(Version:4.0)[S].TheBluetoothSpecialInterestGroup,2010.
[5]SubhanF,HasbullahH,RozyyevA,etal.HandoverinBluetoothnetworksusingsignalparameters[J].InformationTechnologyJournal,2011,10(5):965-973.
[6]KotanenA,HannikainenM,LeppakoskiH,etal.ExperimentsonlocalpositioningwithBluetooth[C]∥ProcofInternationalConferenceonInformationTechnology:CodingandComputing,WashingtonDC:IEEEComputerSociety,2003:297-303.
[7]刘玉军,蔡猛,高立恒,等.基于测距的传感器节点质心定位修正算法[J].计算机测量与控制,2014,22(9):2860-2862.
[8]ShengZhou,PollardJK.PositionmeasurementusingBluetoo-th[J].IEEETransactionsonConsumerElectronics,2006,52(2):555 - 558.
[9]吕振,谭鹏立.一种基于RSSI校正的三角形质心定位算法[J].传感器与微系统,2010,29(5):122-124.
[10] 万国峰,钟俊,杨成慧.改进的RSSI测距和定位算法[J].计算机应用研究,2012,29(11):4156-4157.
Triangle centroid close range localization algorithm based on RPL*
LU Yang-jie, LIU Zhi-qin, YANG Lei, CHAI Lin-xiang
(School of Computer Science and Technology, Southwest University of Science and Technology,Mianyang 621010,China)
Abstract:Aiming at problem of low precision of close range positioning of wireless sensor networks(WSNs),propose a calibration-free triangle centroid localization algorithm based on received power level(RPL).The algorithm uses argument of radio signals RPL to replace traditional argument received signal strength indication(RSSI),it is applied in ranging model,combined with traditional triangle centroid localization model,so as to achieve gools of reducing ranging error,improving positioning precision.Through simulation,compare triangle centroid localization algorithm based on RPL with triangle centroid localization algorithm based on RSSI,results show that under the experimental environment,the triangle centroid localization algorithm based on RPL improves precision of 59.02 % than the triangle centroid localization algorithm based on RSSI,positioning precision has been improved significantly.
Key words:close range localization; received power level(RPL); positioning; triangle centroid localization algorithm; wireless sensor networks(WSNs)
DOI:10.13873/J.1000—9787(2016)03—0137—03
收稿日期:2015—06—23
*基金项目:国家自然科学基金资助项目(61471306);西南科技大学研究生创新基金资助项目(14YCXJJ0054)
中图分类号:TP 393
文献标识码:A
文章编号:1000—9787(2016)03—0137—03
作者简介:
陆杨洁(1991-),女,四川乐山人,硕士研究生,主要研究方向为无线网络、移动应用开发。
猜你喜欢
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
知识经济·中国直销(2018年3期)2018-04-12
软件导刊(2016年11期)2016-12-22
山东农业科学(2016年11期)2016-12-17
电脑知识与技术(2016年27期)2016-12-15
软件导刊(2016年9期)2016-11-07
科技视界(2016年22期)2016-10-18
科学与财富(2016年28期)2016-10-14