
船体水动力网格动态划分技术及应用
2016-07-05 06:10朱雄军李紫麟
船海工程 2016年3期
朱雄军,李紫麟
(1.武汉职业技术学院 计算机学院,武汉 430074; 2.中国船舶科学研究中心,江苏 无锡 214082)
船体水动力网格动态划分技术及应用
朱雄军1,李紫麟2
(1.武汉职业技术学院 计算机学院,武汉 430074; 2.中国船舶科学研究中心,江苏 无锡 214082)
摘要:考虑到船舶与波浪耦合作用下,船体湿表面时刻变化,引起非线性动力效应,根据网格单元与波浪的不同接触类型,分别采用拆分、合并和局部调整得到新的船体湿表面网格,选取波浪环境中线性规则波2种情况,对简体船舶模型在波浪环境下横摇和纵摇进行算法验证,并对线性波中集装箱船湿表面网格动态划分过程进行数值模拟,验证算法的正确性与实用性,为波浪中船体非线性动力特性的时域计算提供技术支持。
关键词:船舶;时域分析;动态划分;网格重构;数值模拟
近年来,网格技术广泛应用于各种工程和科学的数值计算。网格生成[1],网格划分[2],网格优化[3],动网格技术[4]等诸方面关键技术得到发展和完善。模型的网格生成与划分是有限元前处理的重要部分,在数值计算中通常采用初始划分好的网格。在某些研究领域中,网格单元和网格形状需要随时间进行调整,进行网格重新划分(remeshing),完成从旧网格到新网格的信息转换[5]。在网格重新划分的研究中,张玉新等[6]应用有限元分析软件(MSC1SuperForm)中的网格再划分功能,对铝型材的挤压变形过程的三维有限元模拟;丁永祥和夏巨[7]基于等参转换概念及应用小区理论对刚塑性有限元网格重新划分算法进行了研究;吴淑芳等[8]首次考虑了四边形网格被直线切割后各种几何特征,并给出相应的混合调整算法。利用势流理论进行船舶与海洋结构物水动力分析时,常采用格林函数法,计算时需对船体平均湿表面进行网格划分[9-10]。但考虑物体湿表面积及吃水变化引起的非线性动力效应时,需要在每一时间步重新计算湿表面,对变化的水线面附近网格进行动态的重新划分。为此,针对船舶水动力计算中网格动态划分和重构的关键技术进行研究。波浪环境分别选取线性规则波2种情况。船体结构由四边形单元与三角形单元构成。考虑波浪与船体单元间的接触判断确定需要调整的网格。根据网格单元与波浪的不同接触类型,分别采用拆分、合并和局部调整获取新的船体湿表面网格。选取简化的船体模型在波浪环境下横摇和纵摇进行算法验证。最后应用网格动态划分技术,对时域线性波浪下集装箱船湿表面网格动态划分过程进行数值模拟。
1网格动态划分的理论依据
在运算之前,需要读取船体单元和水线面的参数数据。如图1所示,波浪环境选取直线表示静水状态,可通过首尾吃水计算出水线位置;曲线表示线性规则波浪,通过波高,频率,相位描述波浪的位置信息。
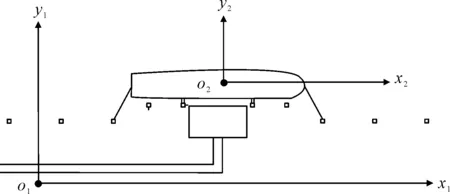
图1 二维船体在波浪中的简化几何模型
对船体外表面采用四边形网格和少部分三角形网格进行划分,因此船体表面信息由节点和单元的集合构成。在算法中采用有限元网格编号方法,即先寻找一个边角节点,使该节点的编号为1,新编号节点沿着已经编号的节点的前沿向外扩展,直到所有的节点编完为止。有限元网格生成以后,单元的信息即可获得。这里用x(i)和y(i)分别表示节点位置属性,elementinf(i,1∶4)表示构成i号四边形单元网格的节点编号,按照逆时针顺序记录。此外,构成船体表面的少量三角形单元,可由四边形退化而成,将该单元的第4个节点与第3个节点重合即可。
船体四边形网格单元与水线面的接触判断是决定网格是否需要重构的直接因素。四边形与水线面的位置关系一般包括3种情况,如图2示:l1与四边形ABCD不相交;l2与四边形ABCD的两条边相交;l3过四边形ABCD顶点并与其相交。可以发现,当四边形中的任意一组对角顶点在直线的两侧的时候,直线穿过四边形,将其切割成两个部分。否则,直线未将四边形剖分。因此,水线面与四边形单元的接触判断可以转化成单元的4个节点与水线面的位置关系进行判断。
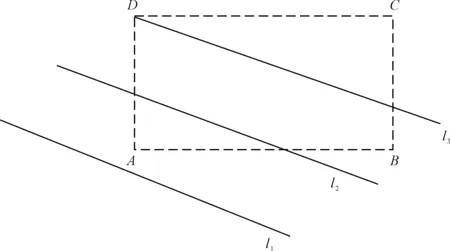
图2 四边形与直线位置关系
通过接触判断,依次记录与水线面有接触的四边形单元,将其单元编号记录在mark(i)(i=1~nmark),nmark为与水线面接触的单元总数。接触单元的交点位置可通过对水线面与网格的接触边的方程组求解得出。图3,通过mark(i)即可获得对应目标单元的存储信息,包括接触的单元信息、单元节点信息、单元邻居列表、单元接触类型与单元接触点的位置。
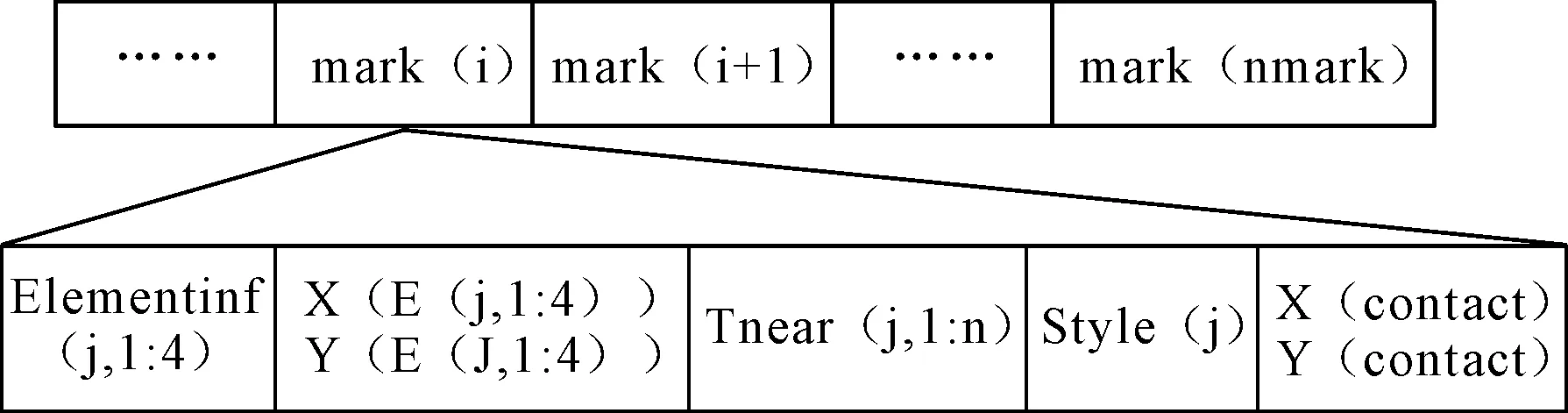
图3 与水线面接触的四边形单元的存储方式
动态网格划分的实质,是对与水线面接触的船体表面单元进行处理,通常采用拆分、合并或区域重组的方法加以实现。可采用穷举法,将线段EF与四边形网格ABCD可能的全部剖分形式列举出来, 建立接触类型数据库。然后针对不同的重构方式,将计算得到的某节点、边或四边形单元附近的区域的单元信息,与给定的“类型”的定义进行匹配,以确定该局部区域网格是否需要重构及相应的重构类型。最后调用所对应的操作,对目标网格进行重构。
2动态网格算法实现
可视化处理有多种方式,对二维数据场的可视化处理方法包括X-Y(曲线)图法、极坐标图法、二维网格法、二维矢量图法、二维等值线法及柱状图法等,对三维数据场的可视化处理方法包括三维网格法、三维矢量图法、三维等值线法及离散点图法等。为了能够清晰的表达三维仿真数据的结构,可视化处理还包括透明度处理、灯光处理、阴影处理和边界处理等方法。此外,数据消隐、坐标轴设置、可视化结果局部控制、动画仿真等一系列高级功能能让仿真数据可视化的结果更形象直观、也更易理解。
Tecplot提供的可视化处理模块作为系统的可视化处理引擎。Tecplot其提供的宏编程接口允许用户对其进行二次开发。
分流程图见图4,可分为4个阶段:①程序初始化,在运算开始前获得水线面的函数表达式及网格信息;②计算出与水线面接触的四边形单元的信息,包括接触点,接触类型两部分;③对需要调整和优化的网格进行重构,并对网格单元信息优化,去掉重复节点和多余单元;④计算时间增量,更新水线面位置信息,进入下一个时间步。
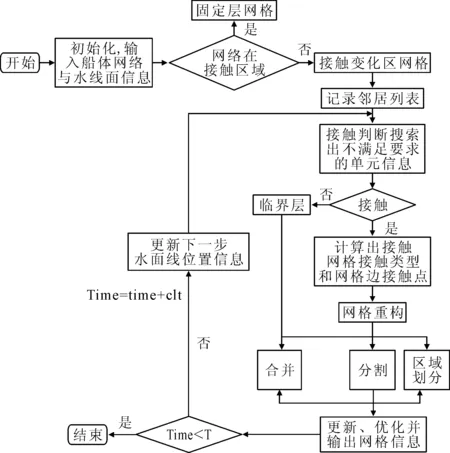
图4 动态网格划分流程
3算例验证
3.1水线面切割下的船体网格单元重构
在算例中,选用如图5所示的长方体模型进行计算方法验证。使用ANSYS建模并对其进行网格剖分,生成252个四边形单元及250个节点。将水线面简化为水平面,垂向高度为模型高的一半。图中为初始时刻网格的划分情况。以水线面为界将模型分为2个部分,包括水线面以上的单元用3层网格表示,以及中间1层和最底下2层组成的为水下单元,其中中间1层为水线面附近经过动态划分后重新构成的单元。
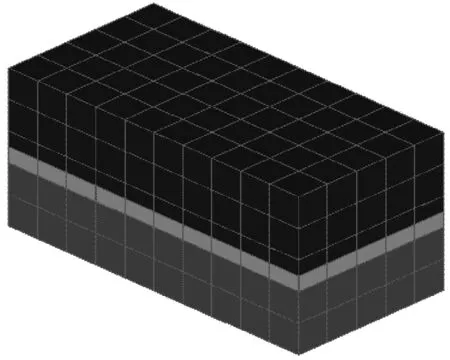
图5 简化的模型单元网格初始状态
考虑静水情况,保持水线面不变,令模型分别进行强迫横摇和纵摇运动,重新划分后的网格效果如图6a)和b)所示。进一步考虑到规则波情况,假定物体固定不动,顶浪作用下网格的变化情况如图6c)和d)所示。此处余弦波可采用差分法,将波函数曲线离散成若干与单元网格相交的线段。这样波浪与模型仍然可采用直线与物体的接触判断准则。

图6 模型单元网格重构结果
3.2非线性波作用下的集装箱船网格动态划分
试验选取集装箱船为研究对象,模拟集装箱船垂荡与纵摇运动下,船体网格的动态划分过程。选取规则波,顶浪状态。船体的运动响应可以通过水动力分析计算,分别测定垂荡和纵摇运动的固有周期、幅值和相位。具体参数见表1。
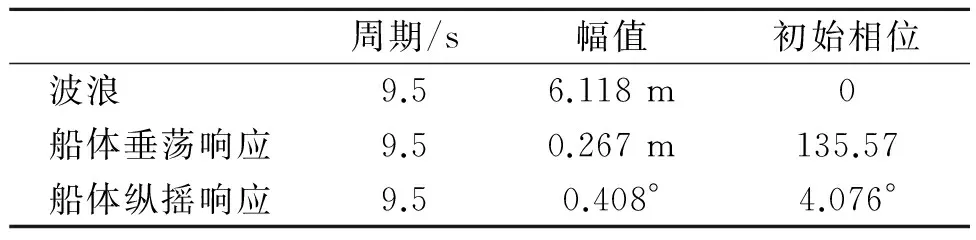
表1 相关参数
在时域模拟过程中,选取0、5、 10 s共3个不同时刻,观察在对应的状态下船体进行网格动态划分过程。图7展示了四边形网格被规则波余弦曲面切割后,经过重构生成的新四边形网格划分图。通过使用拆分、合并和局部调整的方法,根据水线面的位置,对水线面附近的网格单元进行重构。中间曲线向上部分为水面以上的单元,曲线部分是水下固定不变的单元,曲线边缘锯齿状部分为水线面附近重新构成的单元。在进行非线性水动力分析时,即可选用重新生成的锯齿状单元和曲线下的固定不变单元组成的船体湿表面网格进行计算。
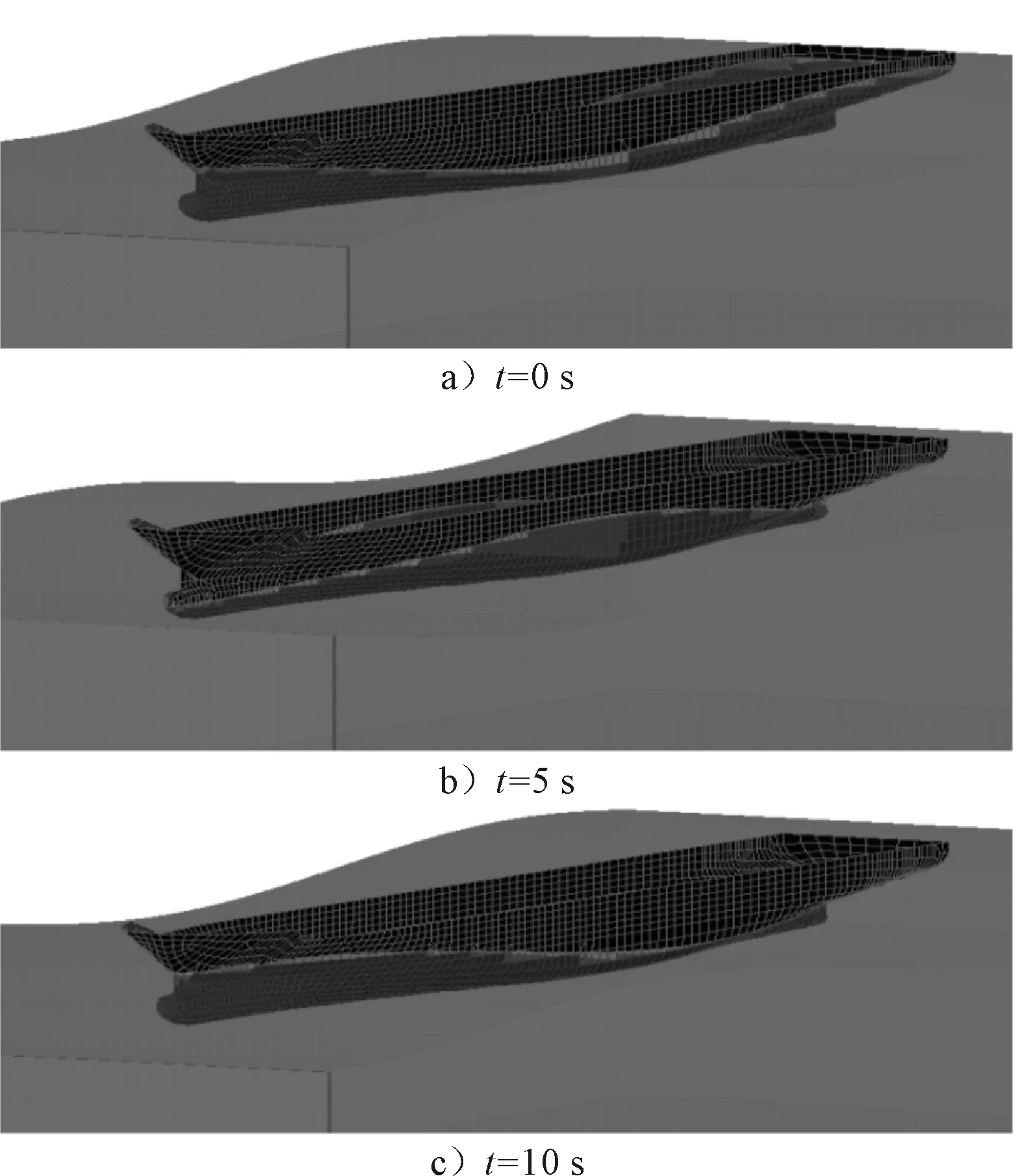
图7 动态划分后重构模型单元网格效果
4结论
给出船体表面二维四边形网格被直线切割的各种几何拓扑特征,并提供相应的处理方法,对船体表面网格被静水线面以及线性规则波面切割的区域进行网格重构,建立接触类型数据库。建立船体水动力网格的动态划分方法,通过静水情况模型的强迫横摇和纵摇运动,以及顶浪状态下模型的强迫横摇和纵摇运动,清晰地展现水线面切割下的船体网格单元重构的应用和效果。仿真模拟集装箱船垂荡与纵摇运动下,船体网格的动态划分过程,验证了算法的正确性与实用性。本文工作可为波浪中船体非线性动力特性的时域计算提供技术支持。
参考文献
[1] 关振群,宋超,顾元宪,等.有限元网格生成方法研究的新进展[J].计算机辅助设计与图形学学报,2003,15(1):1-14.
[2] 古成中,吴新跃.有限元网格划分及发展趋势[J].计算机科学与探索,2008,2(3):248-259.
[3] 李迎华,吴宝山,张华.CFD动态网格技术在水下航行体非定常操纵运动预报中的应用研究[J].2010,14(10):1100-1108.
[4] JO E B. Quadrilateral mesh generation in polygonal regions[J]. Computer aided design,1995,27:194-199.
[5] 杨晓松,顾元宪,李云鹏,等.有限元网格体绘制中的剖切算法[J].中国图象图形学报,2002:7(A)(1):55-62.
[6] 张玉新,钟毅,王华昆,等.塑性成形中的六面体网格划分与重划分技术[J].锻压技术,2004(6):33-35.
[7] 丁永祥,夏巨湛.刚塑性有限元模拟过程中的网格重新划分算法[J].华中理工大学学报,1995,23(I):83-87.
[8] 吴淑芳,李占国,管力锐,等.四边形网格被直线切割的混合调整法[J].长春光学精密机械学院学报,1998,21(2):20-24.
[9] FALTINSEN O M. Sea loads on ships and offshore structures[M]. Cambridge: The Cambridge University Press,1990.
[10] 王俊荣,谢彬.半潜式平台水动力性能及运动响应研究综述[J].中国造船,2009,50(增刊):255-260.
[11] 李鹏飞,徐敏义,王飞飞,精通CFD工程仿真与案例实战[M],北京:人民邮电出版社,2011.
[12] 蓝霄峰,陈娓,向波,等.Tecplot在大镜山水库洪水演进动态可视化的应用[J].人民珠江,2010(1):60-61
Ship Hull Dynamic Remeshing Technique and Its Application
ZHU Xiong-jun1, LI Zi-lin2
(1 Dept. of Computer Science, Wuhan Polytechnic, Wuhan 430074, China;2 China Ship Scientific Research Center, Wuxi Jiangsu 214082, China)
Abstract:When a ship motions in waves, the wet surface is changing continually, causing the nonlinear dynamic effect,. According to the different contact types of grid cell and the waves, respectively adopt split, merge and partial adjustment to get the new mesh of the wet surface. Two kinds of linear regular wave are selected for the wave environment, the dynamic remeshing algorithm is tested and verified by a simplified ship model with motions of rolling and pitching. And the dynamic meshing process for the wet surface of a container ship in the linear wave is simulated to verify the practicability of the algorithm. It can provide the technical support for the time domain calculation of the nonlinear dynamic characteristics of the ship hull.
Key words:ship; time domain analysis; dynamic remeshing; grid reconstruction; numerical simulation
DOI:10.3963/j.issn.1671-7953.2016.03.010
收稿日期:2015-10-26
第一作者简介:朱雄军(1966—),男,硕士,副教授 E-mail:zhuxiongjun@126.com
中图分类号:U662.9
文献标志码:A
文章编号:1671-7953(2016)03-0043-04
修回日期:2015-12-11
研究方向:计算机软件与理论
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
船舶(2021年4期)2021-09-07
水上消防(2019年3期)2019-08-20
船舶标准化工程师(2019年4期)2019-07-24
军工文化(2017年12期)2017-07-17
中国船检(2017年3期)2017-05-18
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
科技视界(2016年22期)2016-10-18
