
CSS无线定位系统设计及非视距抑制算法
2016-07-09 14:27殷学强
现代电子技术 2016年7期
殷学强
摘 要: 针对测量误差概率密度未知的情况,提出了基于半参数的非视距噪声抑制算法。在基于飞行时间的固定标签模型基础上,通过应用大规模蒙特卡罗方法将提出的算法和传统方法进行对比,仿真结果表明,当非视距误差为有偏高斯分布和瑞利分布时,提出的算法能够在非视距污染率较低时与传统方法表现一致,且在污染率较高时也有较强的鲁棒性。结合室内和室外定位的应用进行基站部署,对相应场合下的定位算法进行测试。测试结果表明,提出的算法能够比最小二乘法提高 50%左右的定位精度,整体而言,系统定位能达到在可视环境1 m,非可视环境3 m的精度。
关键词: 非视距抑制算法; 实时定位系统; 半参数法; 双向双边测距算法
中图分类号: TN95?34; TP393.0 文献标识码: A 文章编号: 1004?373X(2016)07?0005?05
Abstract: Since the probability density of the measurement error is unknown, the NLOS (non?line?of?sight) noise suppression algorithm based on the semi?parameter is proposed. On the basis of the fixed label model of flight time, the proposed algorithm is compared with the traditional method by means of the large?scale Monte Carlo method. The simulation results show when the NLOS error is biased Gauss distribution and Rayleigh distribution, the performance of the proposed algorithm is accordance with that of the traditional method at low NLOS pollution rate, and has strong robustness at high contamination rate. The base station is deployed in combination with indoor and outdoor positioning to test the positioning algorithm in corresponding occasion. The test results show that the location accuracy of the proposed algorithm is increased by 50% than that of the least square method. The system location error can reach up to 1 m in LOS environment and 3 m in NOLS environment.
Keywords: NLOS suppression algorithm; real?time positioning system; semi?parameter method; symmetrical double sided?two way ranging algorithm
0 引 言
随着无线通信、微电子、传感器等技术以及分布式信息处理技术的高速发展,无线传感器网络领域已经成为研究热点[1]。而无线定位技术作为无线传感器网络的重要组成部分也得到了越来越多的关注。传感器节点自身的位置不仅可以标定网络采集的数据来源,还可以辅助网络实现目标跟踪、高效路由以及进行网络管理等用途。因此研究无线传感器网络定位技术具有积极的理论意义和广泛的应用价值。
截至目前,无线传感器网络定位研究已广泛开展并取得了许多研究成果,但仍存在着一些没有被解决或被发现的问题,目前最为关键的问题仍然是WSN节点的能耗问题[2]。采用CSS的定位技术使用双边双向测距(SDS?TWR)方法,其能够较好地抑制晶振的漂移,目前室内外定位精度均在3 m之内[3],具有良好的应用前景。本文在学习和分析现有的定位技术和定位算法后,给出了基于CSS技术的无线定位系统,并在算法上立足于抑制无线定位中普遍存在的非视距误差,最终给出了定位算法的实验测试结果。
1.1 非视距下稳健定位算法
M估计使用关于残差的特殊惩罚函数ρ(v)而不是如最小二乘法中的平方函数关系;该设计降低了由NLOS扰动引起的大残差对参数估计的有害影响[4]。M估计可由最小化代价函数给出。转折点参数太小会导致在高斯噪声情况下损失精度甚至当污染率ε增加时会导致收敛性问题。相反,如果转折点参数选择太大,则在NLOS环境中会失去鲁棒性。
由于非参数算法是建立在误差的概率密度函数不可知的前提下,所以必须利用自身样本计算得出的残差并结合非参数核估计误差概率密度,最终利用最大似然得到估算值。半参数化概率密度估计正好结合了参数化方法和非参数化方法的优点,它在数据分布具有一定先验知识的基础上,通过非参数化方法对参数化概率密度估计进行修正,达到提高概率密度估计精度的目的[5]。
1.2 算法仿真
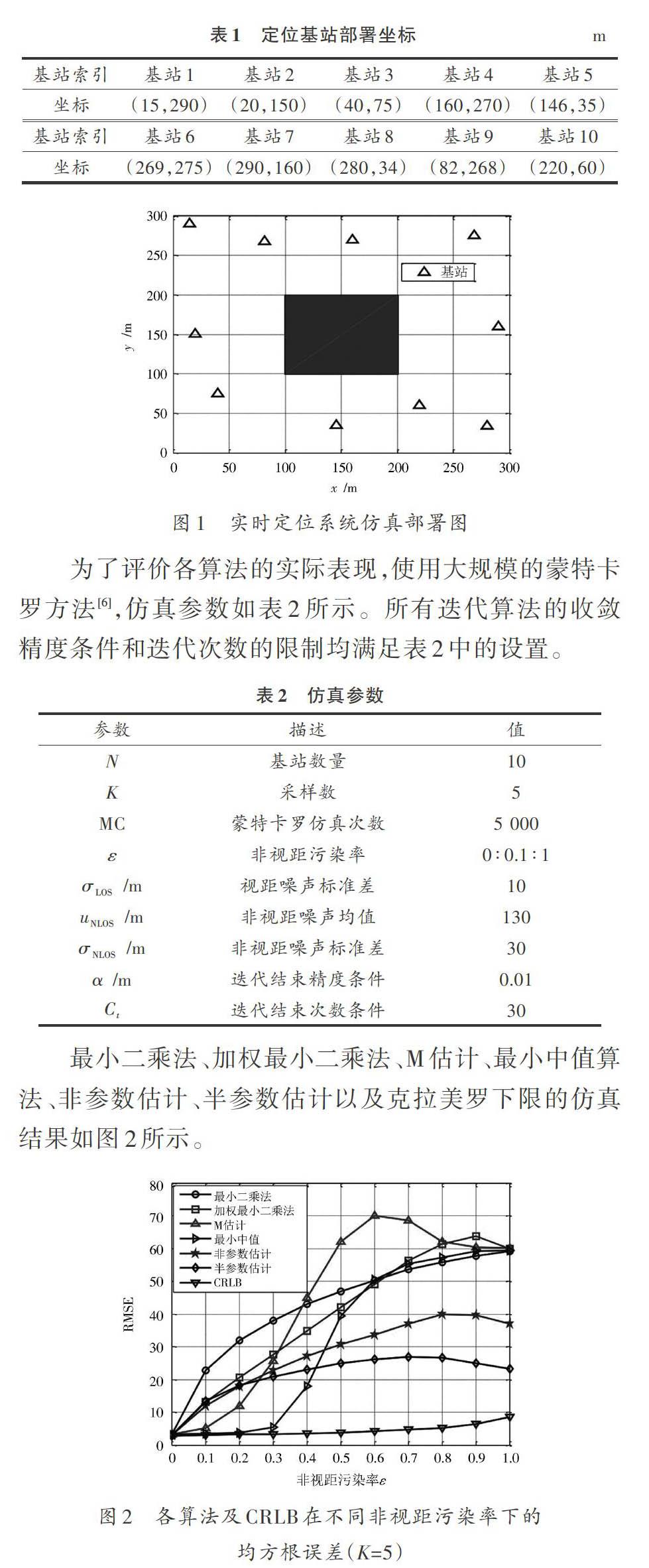
为了验证理论算法,设置实时定位系统如图1所示,在二维平面内一个移动标签节点周围配置 10个固定基站。基站的部署坐标如表1所示,所有坐标均在300 m×300 m的区域内。标签的x轴和y轴的每次蒙特卡罗仿真均匀分布在100~200 m之间,其移动范围为图1中正方形阴影区域。
当非视距污染率[ε=0,]即测距在视距情况下进行时,所有算法位置估计的误差均逼近克拉美罗下限。最小二乘法和加权最小二乘法估计随着[ε]的增加迅速偏离克拉美罗下限,因为两者都不能适应非对称的非视距噪声模型。当[ε]较小时加权最小二乘法比最小二乘法表现更优,加权最小二乘法利用测距距离加权能够抑制部分异常点。最小中值算法得到[ε]=0.3时只损失较小的定位精度,但当[ε]=0.5时最小中值误差较大,其原因在于中值算法的临界点为样本中异常点的密度为50%。M估计方法比较依赖于转折点的选择,当非视距污染率[ε]增加时转折点无法适应噪声模型,故而失去鲁棒性,误差较大。
非参数估计方法的整体误差较小,该方法利用自身残差估计噪声概率密度而不是经验或理论间的估计,具有较强的鲁棒性。本文提出的半参数回归方法具有较好的整体性能,但当[ε]较小时误差相对于其他算法较大。
1.3 算法改进
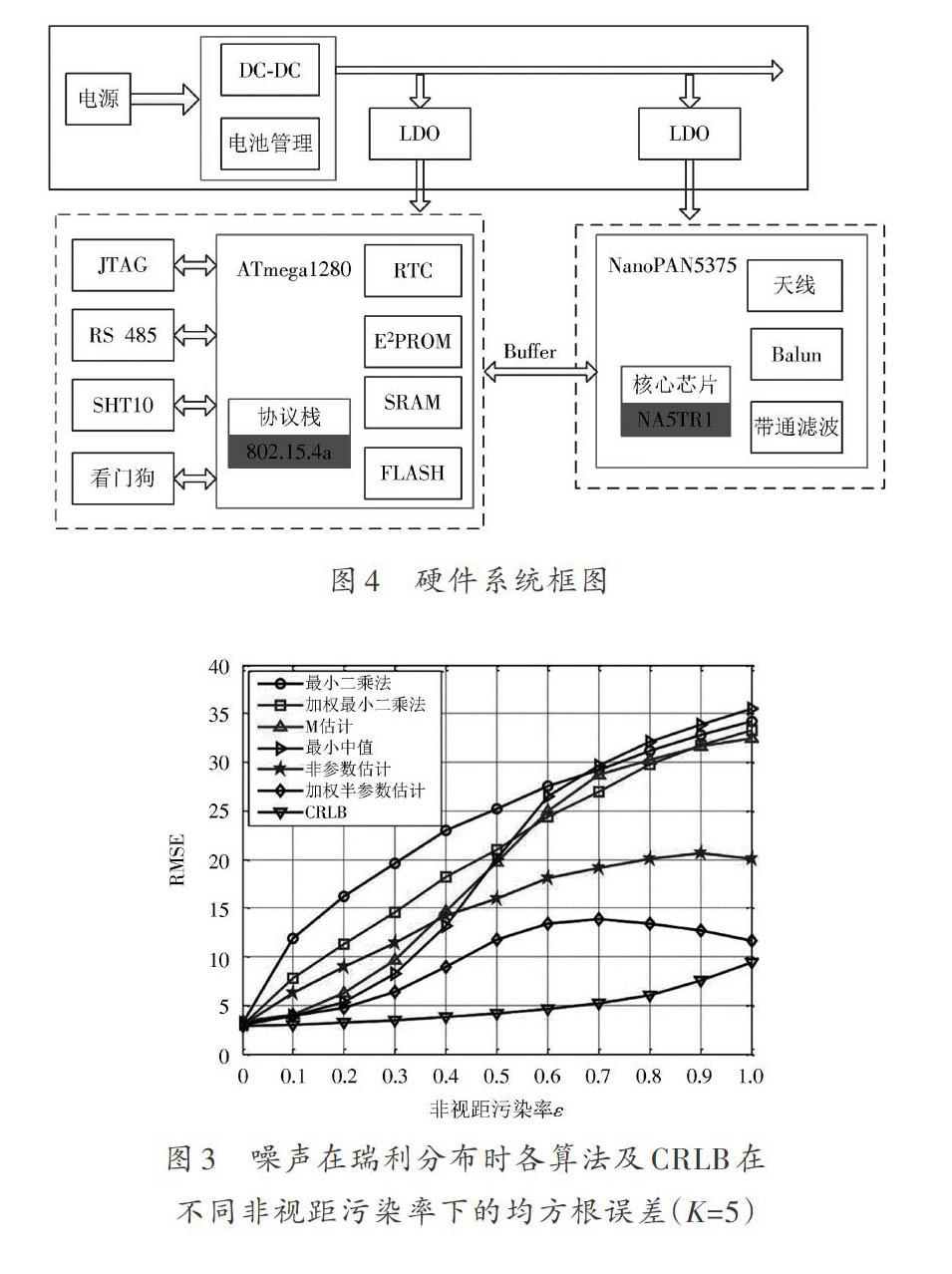
未加权的半参数回归方法不是全局最优的,当非视距污染率[ε]较小时该算法相比其他稳健估计误差较大。而最小中值算法在[ε]较小时只损失较小的定位精度。可以将最小中值算法的权重引入到半参数估计中,从而改善污染率较小情况下的表现。此外还需考虑[ε]=0.5平衡点。加权的非参数方法达到了全局最优。当非视距污染率较小时该算法能贴近克拉美罗下限估计,而当[ε]=0.5时该算法与未加权的半参数算法表现一致。
仿真中定义[σNLOS]=50 m并设置单周期内采样次数[K=5,]仿真结果如图3所示。本节提出的加权半参数估计依然具有较强的鲁棒性,其在所有算法里表现最好。结合非视距噪声,从有偏高斯分布和瑞利分布的仿真结果中可以看到本文提出的算法能够在非视距污染率较低(<10%)时与传统方法表现一致,而且在非视距污染率较高(>40%)时也有较强的鲁棒性。
2 基于CSS技术的无线定位系统设计
2.1 硬件设计
本系统的硬件设计框图如图4所示,该系统以ATmega1280单片机和NanoPAN5375模块为核心,满足了无线传感器节点的通信和测距功能需求。为了进一步获得实时性和稳定性,在单片机内部扩展实时时钟、E2PROM掉电存储、SRAM和FLASH存储等功能[6],片外拓展JTAG调试接口、RS 485通信接口、SHT10传感器接口以及外部复位看门狗。单片机软件层为IEEE 802.15.4a协议栈,其主要任务是负责射频模块、通信模块和传感器模块等的硬件驱动。无线通信测距NanoPAN5375模块内部核心为NA5TR1芯片,射频模块内部集成带通滤波器和Balun等电路,并采用高增益棒状天线射频通信。ATmega1280单片机与射频模块之间采用SPI总线和中断方式通信,由于两者的电源供电电压不同,故在设计上通过电平转换Buffer缓存。
2.2 架构设计
单向双边(TWR)和双向双边(SDS?TWR)测距算法为nanoLOC射频芯片采用,这两种算法不需要节点间时钟同步且能够抑制节点时钟漂移等问题,提高了测距精度[7]。令应答时间replyBt满足N(400,10 000)和N(1 000,40 000)时间的高斯分布,统计晶振的漂移为10 ppm,20 ppm,30 ppm下的误差,对称双边双向测距算法在市场上晶振精度比较容易达到20 ppm的情况下,仿真结果表明理论误差在1 m之内。
NanoLOC驱动采用IEEE 802.15.4a协议[8],该架构应用层通过上行函数APPCallback解析,包括测距请求确认、测距数据确认和测距完成等数据包,该函数的主要任务是完成测距数据包应答和上层的距离滤波算法;物理层通过PDSap函数接收应用层发送的数据包,主要完成测距执行请求、测距数据请求、测距中间过程如回复1和回复2阶段执行等功能。PLMESap函数接收应用层发送的配置信息,设置包括射频通信信道、输出功率、硬件应答功能、带宽、FEC功能、工作模式和MAC匹配地址等。此外,回调函数PDCallback接收硬件适配层的信息,完成CRC校验、数据有效校验和配置硬件收发寄存器等功能;该架构采用基于ATmega1280单片机的硬件适配层,硬件上采用SPI总线、中断和复位等方式与NanoLOC芯片通信。
3 定位系统及算法测试
3.1 测距测试
节点测距测试主要流程如下:基站与标签之间通信数据后,基站按照协议打包发送至测试计算机,上传数据主要包含测距值、场强值、标签地址、基站地址和通信状态,帧的起始以“#”开始,所有测量值之间以“:”分隔。数据帧中场强信息被量化为无符号型6位二进制整数即数值范围为0~63,通信状态分为正常状态0和通信错误状态1。测试计算机采用C#语言对底层串口Serialport类进行二次开发完成数据协议解析,并完成数据库数据录入。
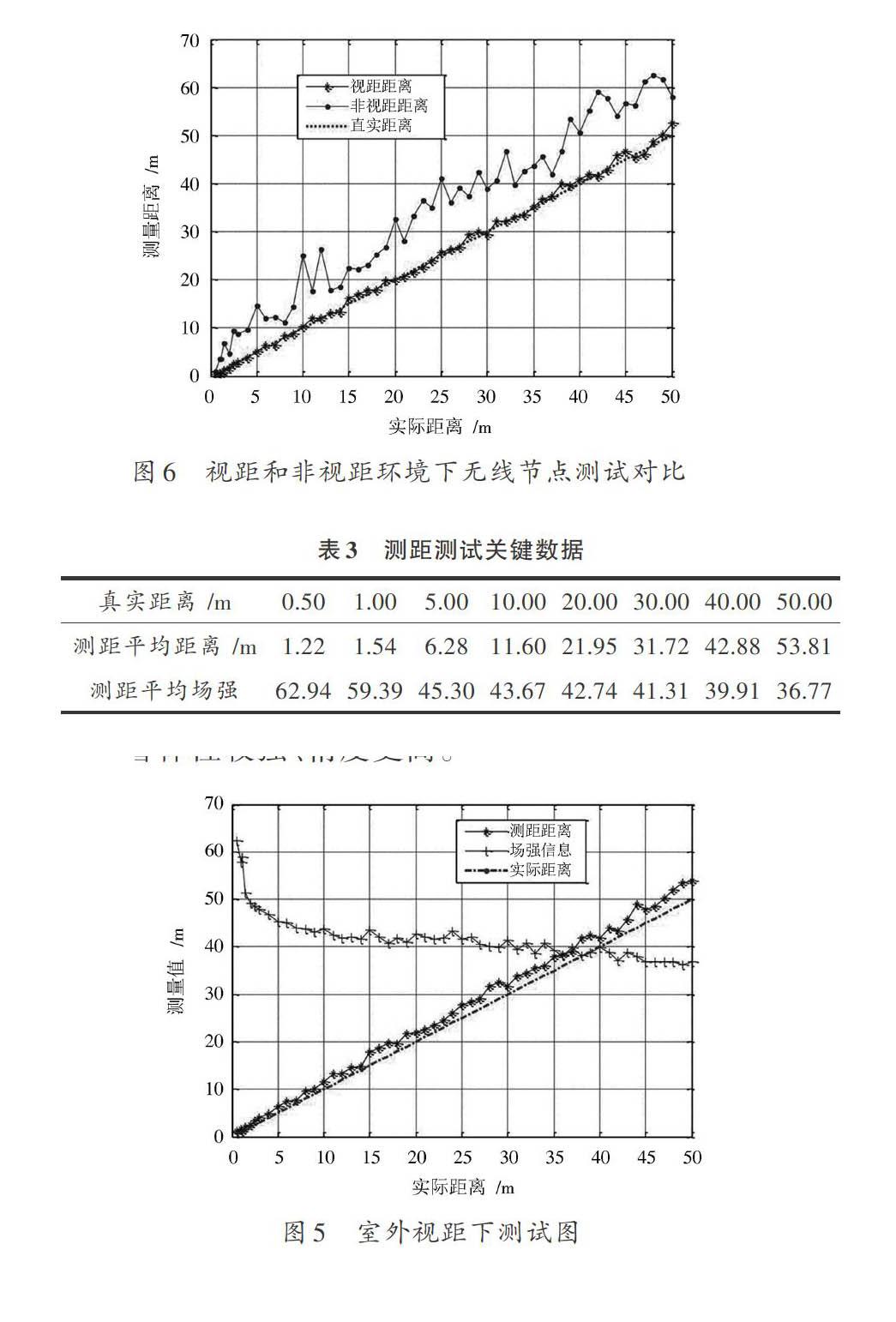
本文设计的无线节点采用全向5 dBi增益棒状天线,模块的发射功率均为20 dBm,考虑到垂直于棒状天线的方向辐射最强,因此本节所有的测试基站和标签的天线都垂直安装。标签和基站均安装在高度为1.4 m的三脚架上,测试计算机为笔记本电脑。测试条件为空旷的室外且节点通信为视距情况下,测试时天气温度为3 ℃,相对湿度28%,微风,天气晴朗。测试结果关键数据如表3所示,每个测试点的数据均为测距100次的平均值。
室外视距下的测试图见图5。通过曲线可以看到节点在视距情况下通信,测距的值普遍大于真实值,而且随着距离的增大误差逐渐增加,如当距离为50 m时误差达到4 m。另外场强在距离比较小的情况下衰减比较明显,而当通信距离大于5 m之后衰减比较平缓。该测试部署中,节点间距离大于50 m后,测距会有明显的丢包且测距误差偏差较大。另外,由图5可知,采用基于飞行时间的测距方法与以场强衰弱为模型的测距相比,鲁棒性较强、精度更高。
3.2 定位测试
为了衡量节点在非视距条件下的表现,利用之前的测距实验节点部署重新测试[9],测试结果如图6所示。通过图中视距距离、非视距距离与真实视距距离的对比可以得出:在视距情况下,节点的测距精度较高,误差都控制在3 m之内;而在有明显遮挡的非视距下测距结果明显偏大于真实值,随着测距距离的增加误差有增大的趋势,整体而言误差无明显分布规律。
室外测试选取在某处花园,该测试场景为典型非视距场景,场景中的石碑、树木和行人等会对测距及通信产生干扰。实验中共部署8个基站,测试中标签的精确位置采用差分GPS来标定,差分GPS定位精度在2 cm左右(3D)。实验测试时天气温度为15 ℃、相对湿度30%、轻风、阴天。测试误差累积分布函数如图7所示,关键统计数据如表4所示。通过对比可以看到,加权半参数比最小二乘法的定位效果有显著提高,在累积分布函数80%的误差点的测距误差为1.35 m,而相比之下最小二乘法的误差为2.58 m,本文采用的算法精度提高近50%。加权半参数法的最大误差控制在4 m之内,而最小二乘法达到了9 m,定位效果的提高是比较明显的。总体来说,系统在采用本文提出的加权半参数算法后整体定位的误差基本控制在3 m之内,具有应用价值。
室内测试选取普通的室内环境,测试面积在960 cm×660 cm之内。该环境下如杂物、电脑、柜子等物体会对定位效果产生不利影响,且测试时节点间会存在非视距的传播。实验测试时共部署4个基站,测试时标签与基站在同一高度,即测试是在二维平面上的定位。测试时随机选取一组测量数据,并绘制误差曲线如图8所示。图中横坐标为测量点,纵坐标为定位绝对误差,可以看到大部分情况下本文采用的算法优于最小二乘法,最小二乘法的最大误差为2.5 m,而本文的算法误差在1.5 m左右。此外,最小二乘法的误差集中在1.5 m左右,而本文采用的算法误差控制在1 m之内,定位精度提高了50%左右。
4 结 论
本文在借鉴和吸收现有的定位技术和定位算法基础上,结合实际应用给出了基于CSS技术的无线定位系统,并在算法上立足于抑制无线定位中普遍存在的非视距传播带来的影响。本文提出的基于半参数算法是针对测量误差的概率密度未知情况下的稳健算法,仿真结果表明,此算法在视距、非视距和混合环境中都有较强鲁棒性。建立基于CSS技术的无线定位系统,定位测试给出室内和室外两种情况,经验证,文中提出的无线定位系统以及非视距抑制算法均表现出较强的实用价值。文中设计的定位系统在室内定位测试中表现一般,还需提升。下一步工作主要考虑采用多传感器融合技术,如将基于飞升时间技术与场强定位技术相结合,从而使节点在近距离的测距值得到很大程度上的修正,优化最终的定位效果。
参考文献
[1] LIU D, LEE M C, PUN C M, et al. Analysis of wireless loca?lization in nonline?of?sight conditions [J]. IEEE transactions on vehicular technology, 2013, 62(4): 1484?1492.
[2] OH D, KWAK M, CHONG J W. A subspace?based two?way ranging system using a chirp spread spectrum modem, robust to frequency offset [J]. IEEE transactions on wireless communications, 2012, 11(4) :1478?1487.
[3] 彭宇,王丹.无线传感器网络定位技术综述[J].电子测量与仪器学报,2011,25(5):389?399.
[4] FENG Y, ZOUBIR A M. Robust positioning in NLOS environments using nonparametric adaptive kernel density estimation [C]// Proceedings of 2012 IEEE International Conference on Acoustics, Speech and Signal Processing. Kyoto: IEEE, 2012: 3517?3520.
[5] FENG Y, FRITSCHE C, GUSTAFSSON F, et al. TOA based robust wireless geolocation and Cramér?Rao lower bound analysis in harsh LOS/NLOS environments [J]. IEEE transactions on signal processing, 2013, 61(9): 2243?2255.
[6] WU S, LI J, LIU S. Improved localization algorithms based on reference selection of linear least squares in LOS and NLOS environments [J]. Wireless personal communications, 2013, 68(1): 187?200.
[7] CHEN H, WANG G, WANG Z, et al. Non?line?of?sight node localization based on semi?definite programming in wireless sensor networks [J]. IEEE transactions on wireless communications, 2012, 11(1): 108?116.
[8] 吴超,吴明赞,李竹.基于电磁兼容的高速无线节点PCB设计与仿真[J].电子器件,2012,35(3):291?295.
[9] 杜传明.百度地图API在小型地理信息系统中的应用[J].测绘与空间地理信息,2011,34(2):152?154.
