基于虚拟电子主轴的双电机同步控制研究
2016-07-15 08:13王少军
装备制造技术 2016年3期
关键词:同步控制
陈 凌,王少军,范 维,卢 红
(1.武汉理工大学机电工程学院,湖北 武汉430070;2.东南密苏里州立大学,美国 开普吉拉多MO63701)
基于虚拟电子主轴的双电机同步控制研究
陈凌1,王少军2,范维1,卢红1
(1.武汉理工大学机电工程学院,湖北 武汉430070;2.东南密苏里州立大学,美国 开普吉拉多MO63701)
摘要:为了解决双驱同步进给系统中双电机的同步控制的问题,实现精确同步控制,提出虚拟电子主轴+改进的鲁棒内环PID的双电机同步控制方法。建立感应电机数学模型,分析双电机同步控制的的基本控制策略,针对所选倍福运动控制系统建立虚拟电子主轴+改进的鲁棒内环PID同步控制算法及参数整定,通过建立仿真模型,比较三种控制策略。对同步误差和跟随性能分析表明,采用虚拟电子主轴+改进的鲁棒内环PID控制方法,具有响应速度快、抗干扰能力强、双轴同步精度高等优点。
关键词:双电机驱动;同步控制;虚拟主轴控制;鲁棒内环PID
随着高端装备制造业的不断发展,工业领域中单台电机配合丝杠和齿轮等传动机构驱动的方案已经不能满足现代制造业性能、质量的要求。近年来,采用双电机与滚珠丝杆构成的双电机同步进给系统,由于其较高的系统刚性、加工精准度、稳定性等优点,受到了广泛应用。
双电机同步控制作为控制技术中一个重要分支,不仅对单个控制电机的控制精度提出要求,也要求两个轴之间的同步性协调控制。早期日本的Nakamura等针对两自由度机械手位置同步问题,提出的“主从双模同步控制”技术[1]。Lorenz提出的主从控制技术,有控制结构简单,控制的形式多样等优点[2]。Koren提出的交叉耦合控制[3],其作为一种改进的并联结构形式,具有较好的轴间同步性能,在双轴同步控制中应用广泛。由于双驱同步系统具有的复杂机械耦合关系,在运行过程中受到的扰动,负载变化等将会导致两个电机运动的不同步,从而导致了系统的加工精度降低,甚至损坏工作台。因此双电机同步技术的研究具有重大的现实意义。本文围绕双电机同步进给系统,针对系统中双电机同步的精度要求,提出虚拟电子主轴+改进的鲁棒内环的双驱同步控制方法,通过Matlab软件进行模拟仿真,得到验证。
1 感应电机的数学模型
考虑到低转速和负载冲击的场合中能够满足系统高精确度的要求,本文采用了永磁同步电机进行数学模型的建立[4],图1所示
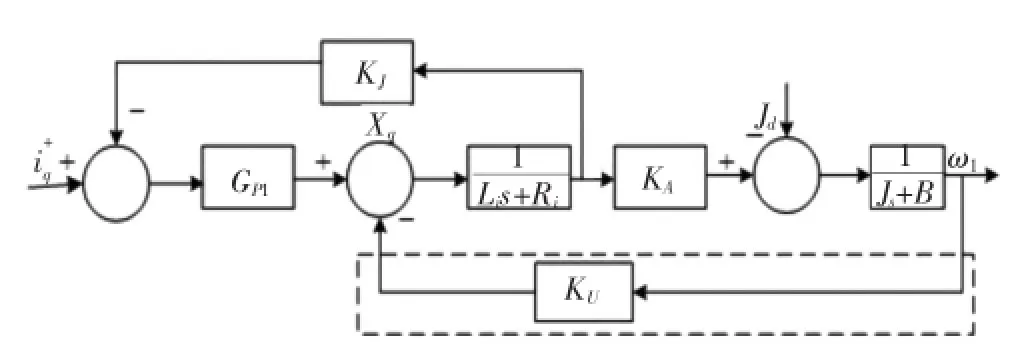
图1 PMSM电机伺服框图
以Xq为输入,ω1为输出时,电机传递函数G1(s)如下:

其中:
KA为转矩系数;
KU为感应电动势系数;
J1为转子和负载总转动惯量;
R1为dq坐标系上定子绕组电阻;
Li为电枢电感。
2 双电机同步控制器设计
为了提高双电机同步控制性能,需要提高单电机自身跟踪精度,消减双电机之间的进给位移同步误差,对双电机同步控制的策略和结构进行设计,目前同步控制策略主要有并联同步、主从同步、交叉耦合和虚拟电子主轴同步控制策略几种。
虚拟主轴控制法基本原理是通过在主动轴与从动轴之间代入一个耦合力矩模块,任何一个从动轴的运动状态的变化都会通过虚拟扭转力矩反馈到主轴控制器的前端通道上,从而影响其他轴的运行,使得系统具有良好的同步性[5]。虚拟电子主轴同步控制方式在同步性和越阶响应上要优于并联同步控制方式,与主从同步控制策略相比较,实轴滞后小[6],且系统抗干扰能力和鲁棒性强于交叉耦合同步控制方式。
通过单轴改进的鲁棒内环PID控制器的控制结构,结合虚拟电子主轴同步控制策略,在双电机同步控制器Kd的基础上,增加虚拟电子主轴模型,可以在保证单电机的跟踪精度和响应特性的同时,提高双电机同步控制的稳态和动态性能。单轴鲁棒内环PID控制器Ks是提高单电机控制跟随性能和响应特性的关键,对电机驱动的干扰信号进行抑制。对于本文所搭建双驱同步控制系统,在驱动控制水平对伺服电机进行运动控制,永磁同步电机与丝杠系统构成的是二阶伺服电机系统,单电机控制器的设计要求是在高阻特性的基础上对低频干扰进行抑制。最终设计的虚拟电子主轴+改进的鲁棒内环PID的双驱同步控制方法结构图2所示。
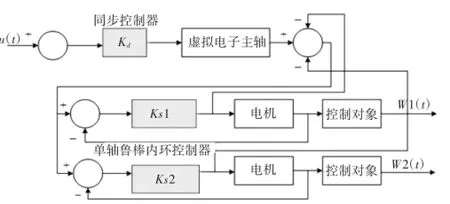
图2 双电机虚拟电子主轴同步控制方式结构
3 双电机同步控制建模仿真
采用本文设计的控制方式对该双电机同步控制系统数学模型进行双电机同步控制建模,其Simulink模型及阶跃响应仿真结果如图3所示。
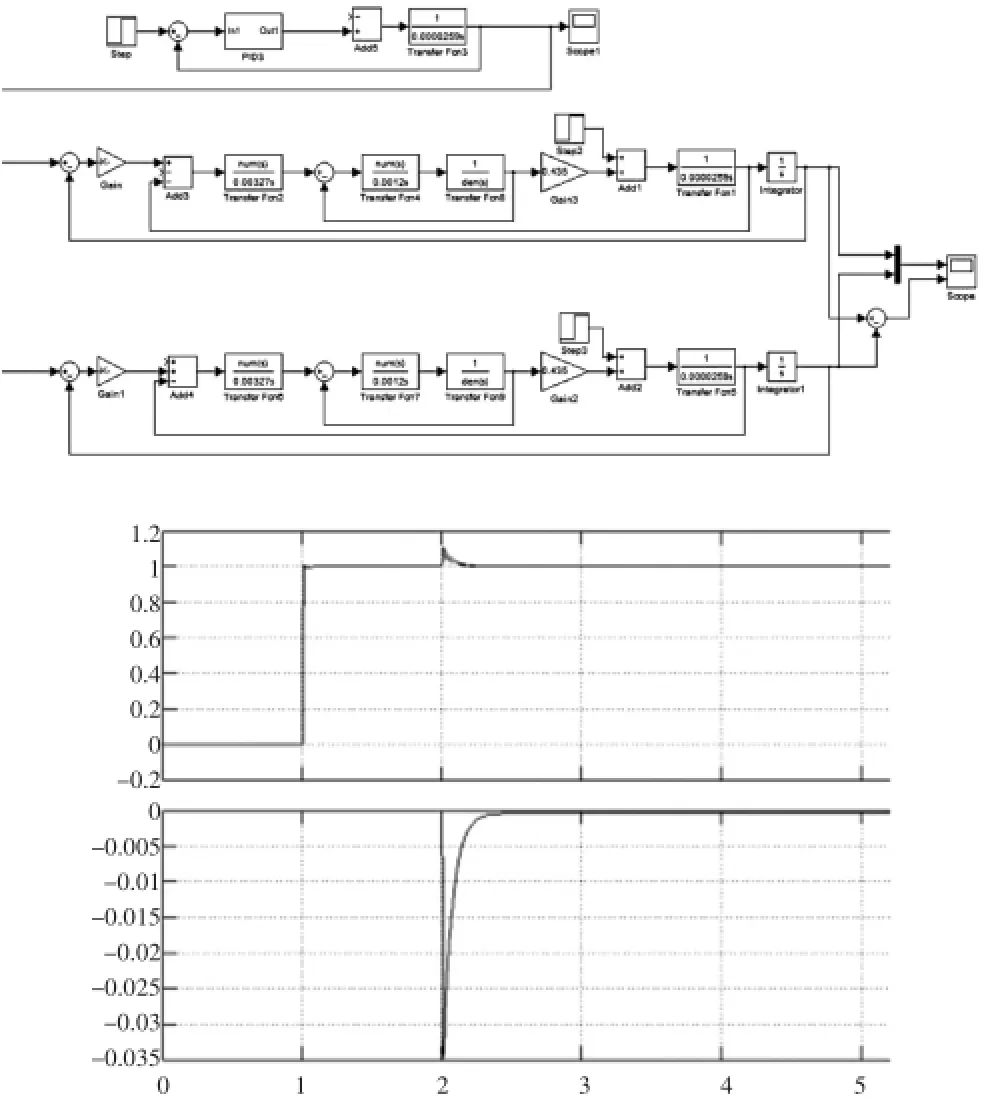
图3 虚拟电子主轴+改进鲁棒内环PID仿真模型阶跃响应仿真结果
为了验证本文提出采用虚拟电子主轴+改进的鲁棒内环PID的控制方法在双电机同步控制系统中的响应速度快、抗干扰能力强、双轴同步精度高等优点,基于上文所建立永磁同步电机数学模型,结合虚拟电子主轴、并联、主从三种同步控制策略与PID控制进行双电机同步控制建模仿真,对比三种控制策略和算法在阶跃响应下的超调量和响应时间,采用干扰信号模拟负载扰动,分析三种控制策略和算法的抗干扰能力,以此验证所提出虚拟电子主轴+改进的鲁棒内环PID控制的跟踪精度和同步性能。
通过对比主从同步控制系统的阶跃响应仿真结果如表1所列,可以看出采用虚拟电子主轴+改进的鲁棒内环PID控制超调量小,在主从轴之间产生不同干扰时,主从同步控制中从轴的位置跟踪相比主轴有了明显的滞后,而虚拟电子主轴控制策略双轴响应速度更快。而并联同步控制系统的阶跃响应仿真结果表明在双轴产生不同干扰时,双轴之间由于没有任何联系,同步误差较大,而虚拟电子主轴+改进的鲁棒内环PID控制位置跟踪精度更高,同步性能好。
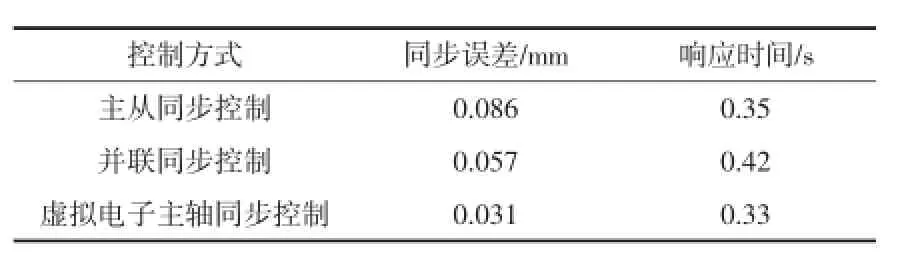
表1 三种控制方式仿真结果
4 结束语
本文基于倍福运动控制系统,采用了虚拟电子主轴+改进的鲁棒内环PID同步控制方法,通过建立模型以及仿真实验,将虚拟电子主轴+改进的鲁棒内环PID同步控制方法与主从同步控制和并联同步控制进行比较分析。仿真结果表明采用虚拟电子主轴+改进的鲁棒内环PID同步控制具有稳态精度好、受干扰动态性好、鲁棒性强等优势。
参考文献:
[1]Nakamura M,Yamanaka S.Dual Mode Synchronous Positioning with Switching of Master Slave Axes by Using a Torque Signal for Contour Control of Articulated Robot Arms[J].Electrical Engi neering in Japan,Vol.138,NO.2,2002 Translated from Denki Gakkai Ronbunshi,Vol.121-C,NO.1,January2001,pp.82.89.
[2]R.D.Lorenz and P.B.Schlnidt,“Synehronized Motion Control for process Automation”[C].IEEE Conference on Industry Appli cations Soeiety Annual Meeting,PP.1693-1698vol.2,l-5 Oct. 1989.
[3]Koren Y,Cross-coupled biaxial computer control for manu faeturing systems[J].ASME,Journal of Dynamic Systems,Measurement and Control,1980,102(4):265-272.
[4]李琳.数控机床交流伺服控制系统的设计与仿真[D].宜昌:三峡大学硕士学位论文,2006.
[5]李晓明.基于虚轴法的高速液压同步控制策略研究[J].液压与气动,2008,(11):33-36.
[6]肖亮亮.基于虚轴法的多轴同步运动控制系统设计[D].杭州:浙江理工大学硕士学位论文,2010.
Research on Dual-Motor Synchronous Control based on Electronic Virtual Line-shafting
CHEN Ling1,WANG Shao-jun2,FAN Wei1,LU Hong1
(1.School of Mechanical and Electrical Engineering,Wuhan University of Technology,Wuhan 430070,China;2.Southeast Missouri State University,Cape Girardeau MO 63701,USA)
Abstract:In order to solve the problems of dual-motor asynchrony in dual-drive synchronization feed system,and achieve precise synchronization control,The method of electronic virtual line-shafting+improved Robust internal loop PID for Dual-Motor Synchronous Control is proposed in this paper.Established the mathematical model of motor,discussed the dual-drive basic synchronization control strategies.Constructed the electronic virtual lineshafting+improved Robust internal loop PID synchronous control algorithm and parameter setting based on Beckhoff motion control system selected in the paper.By the established of simulation models,compared three kinds of synchronous control method.Analyzed the synchronous error and following performance indicated that the method of electronic virtual line-shafting+improved Robust internal loop PID have the advantages of faster response speed,stonger Anti-interference,higher synchronization precision.
Key words:dual-motor;synchronous control;electronic virtual line-shafting;Robust internal loop PID
中图分类号:TP275
文献标识码:A
文章编号:1672-545X(2016)03-0009-03
收稿日期:2015-12-26
基金项目:湖北省自然科学基金(编号:2014CFB184),武汉市科技攻关计划(编号:No2014 01010101010010),中央高校基本科研业务费专项资金资助(编号:NO.2014-zy-066)。
作者简介:陈凌(1989-),男,福建宁德人,在读硕士研究生,研究方向:先进制造工艺与装备;王少军(1957-),男,博士,博士生导师,美国东南密苏里州立大学工业与工程技术系任教;范维(1987-),男,湖北荆州人,博士,研究方向:数字制造科学。卢红(1965-),女,湖北黄冈人,博士,教授,博士生导师,研究方向:先进制造工艺与装备。
猜你喜欢
北京航空航天大学学报(2020年10期)2020-11-14
制造技术与机床(2018年11期)2018-11-23
数码世界(2017年7期)2017-12-29
中国科技纵横(2017年7期)2017-05-16
科技创新与应用(2017年12期)2017-05-08
制造技术与机床(2017年2期)2017-05-04
浙江大学学报(工学版)(2016年11期)2016-06-05
浙江大学学报(工学版)(2016年2期)2016-06-05
制造技术与机床(2015年10期)2015-04-09
舰船科学技术(2015年8期)2015-02-27