基于wifi的智能变电站巡检机器人设计
2016-07-31 21:16强胡立夫李
中国科技信息 2016年14期
张 强胡立夫李 彭
1.沈阳航空航天大学自动化学院
基于wifi的智能变电站巡检机器人设计
张 强1胡立夫2李 彭1
1.沈阳航空航天大学自动化学院
变电站的巡检工作是保证变电站正常工作、安全运行的一项基础且极其重要的工作。传统巡检任务需要运行巡检人员定期到各个变电站去做巡检,采集大量的运行数据,时间过长;并且在特殊情况,如高温,大雪等和一些地理条件十分恶劣的也需要去巡检,对于巡检人员的安全没有保障。鉴于此情况,提出一种基于wifi的智能变电站巡检机器人设计。智能变电站巡检机器人可在无人参与的情况下按照预设路线进行自主巡检,并对电力设备的异常情况进行预警处理或执行预先设置的故障处理措施,实现对电力系统设备状态信息的自动采集与分析。
随着科技的不断发展,电已经成为了不可缺少的日常品,现如今超高压、特高压输变电系统工程正在大规模发展,而新电压等级、新技术的大量应用使变电站传统的运行、操作、维护等都面临着新的挑战,如何运用新技术、新手段以减轻变电站的运行维护负担,更加有效的保障设备安全运行可靠,成为今后所面临的主要问题之一。
本文设计的基于wifi的变电站巡检机器人系统采用以mc9s12xs128单片机作为核心微处理器,配合以红外摄像头,可见光摄像头,声呐传感器,加之以无线通信、语音报警等模块来实现巡检显示、避障,无线传送数据、语音报警等功能。在巡检过程中,把记录的数据发送到上位机,值班人员根据反馈数据做出相应措施。
系统总体方案设计
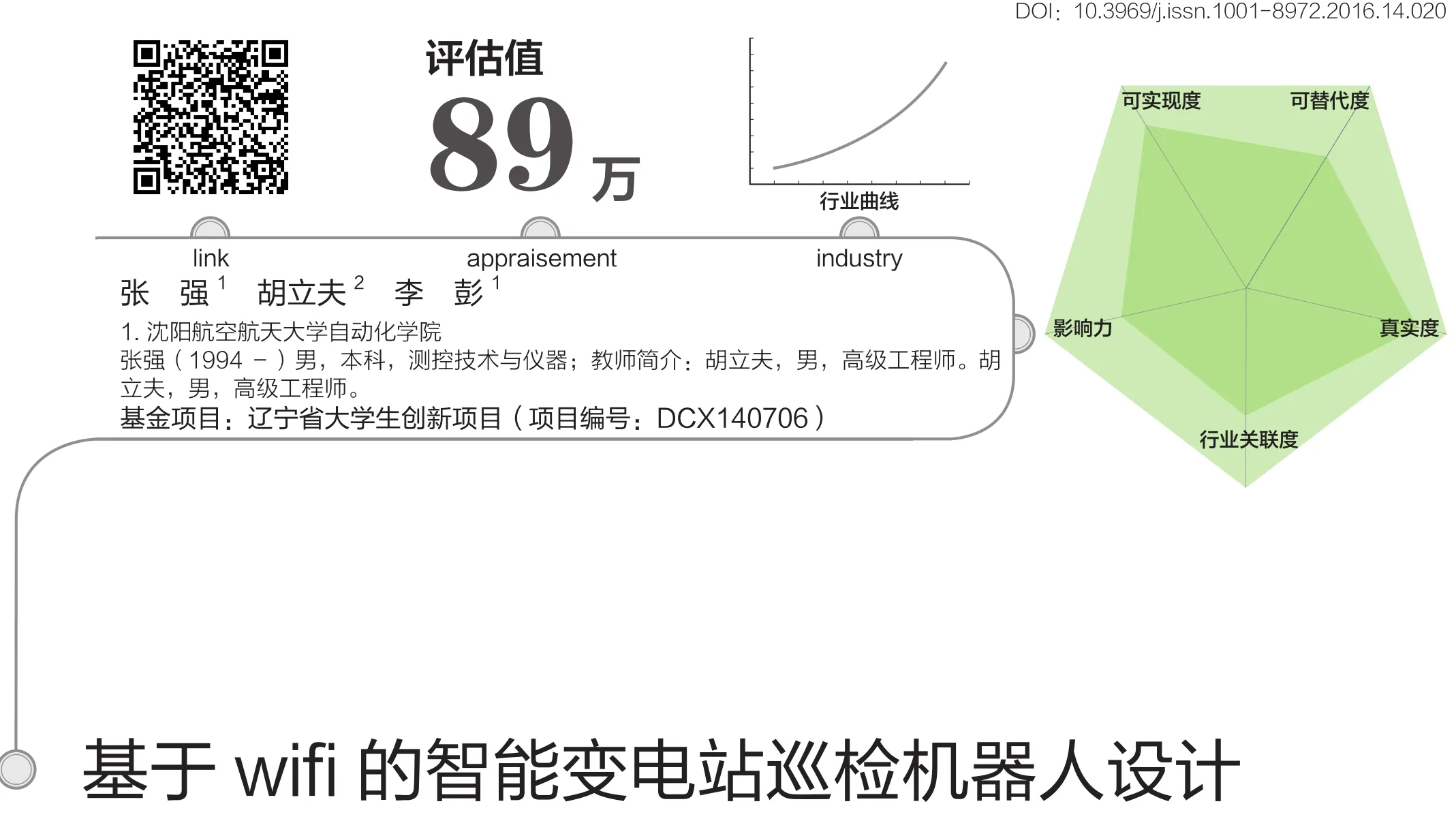
基于wifi的变电站巡检机器人系统由控制中心和巡检机器人系统两部分组成。控制中心包括基于C/S架构的本地控制中心和基于B/S架构的远程控制中心两种模式。本地控制中心位于局域网中,是巡检机器人的中心控制系统,工作人员在办公地点控制,其安全性较强,且实时性较高。远程控制中心系统实现了工作人员在外可远程控制,通过Internet网络访问和操作移动机器人、本地控制中心,具有良好的开放性、灵活性,方便管理人员实时了解变电站的情况和机器人的状态。
巡检机器人安装有导航系统和声呐系统,可以获得变电站环境的数据信息,精确导航与避障,实施安全巡检。双向传输音频系统可以接受现场的音频信号,对变电站设备的声音有无异常进行检测;若发现异常情况,将触发机器人报警模块发出报警信号,本地控制中心的工作人员也可通过遥控音频系统对现场人员提出警告,从而有效避免安全事故的发生。监控系统设备包括红外热成像摄像头与可视光摄像头,可以对变电站设备的运行情况进行检测,视频信号与音频信号通过视频服务器同步传输到控制中心。如图1所示。
系统硬件设计
根据变电站监控系统的特点,构建巡检机器人硬件系统包括机器人本体、mc9s12xs128单片机、摄像头、音频系统、导航系统、无线通讯系统、避障声呐系统及报警系统等组成,如图2所示。
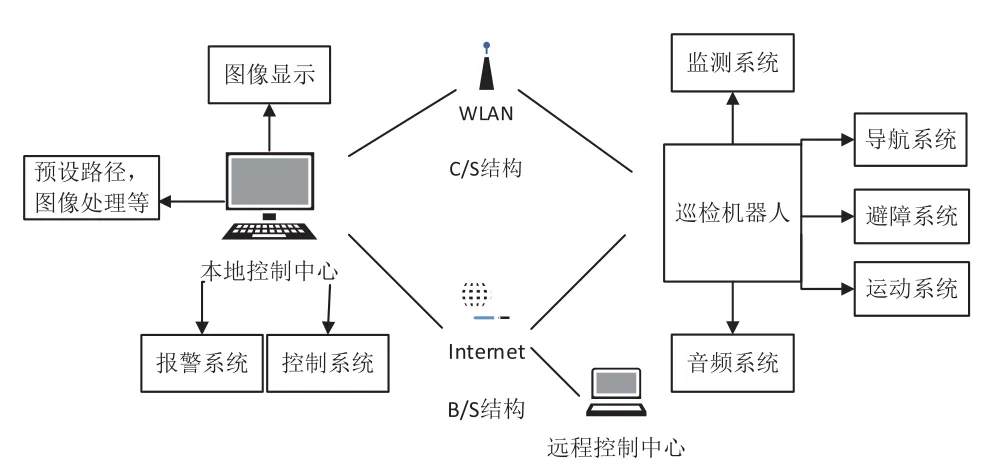
图1 系统总体结构图
图2 智能变电站巡检机器人系统框图
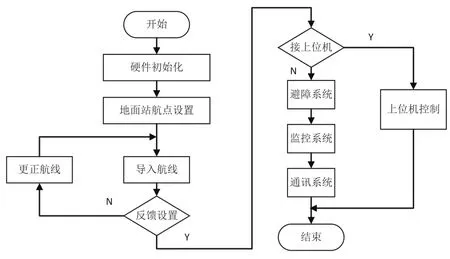
图3 系统程序图
控制系统
基于wifi的变电站巡检机器人控制系统分为两层,底层控制部分负责控制机器人的行驶速度和航向,使巡检机器人可以平稳快速的行驶到目的地;。上层控制部分提供了高层次的机器人控制,包括导航系统,预设路径等功能。
无线通讯系统
无线通讯系统通过无线局域网与控制中心进行信息交流,接受指示和反馈信息。选用无线网卡TP-LINK,使得机器人和控制中心可以快速通信;再在无线网卡接口连接12dB的全向天线,确保巡检机器人与信号接收器连接,稳定传输信息。选用TP-LINK无线路由器,作为无线局域网的接入点AP来搭建了无线网络环境。巡检机器人发送消息时,首先通过无线网卡接入无线路由器,无线路由器再通过其广域网连接端口连接到Internet网络,然后发送给控制中心;反过来,控制中心通过Internet网络远程控制机器人进行操作。
监控系统
监控系统包括热成像和可见光两部分,热成像部分采用红外热成像仪,可见光部分采用普通可见光摄像头。安装在能左右旋转又能上下旋转的全方位云台上。
选用红外热成像仪测定目标,由于一切物体都在不断的辐射红外线,接受被测目标的红外辐射能量分布图形反映到红外探测器的光敏元件上,从而获得红外热像图。
选用普通可见光摄像头采集视频数据,控制中心可以实时了解现场的情况,也可以把采集的视频数据存储起来,以备以后的查看。
避障声呐系统
机器人避障声呐系统选用超声波传感器,具备独立的驱动电路,能够单独控制,操作起来灵活、方便。考虑到芯片引脚与编程问题,一共选用了16个超声波传感器。其中机器人的左右两侧各2个,其余12个均匀分布在前后两边。这16个超声波传感器的布置可以为机器人提供360度全方位的检测,从而有效的达到避障的目的。
系统软件设计
变电站巡检机器人系统程序主要包含驱动程序和控制运算程序,其中驱动程序主要完成上位机数据接收、超声波数据接收、摄像头数据接收、电机控制等功能;控制运算程序,主要完成导航控制功能;当机器人与控制中心进行航线通信后,把航线发送到机器人的存储区,控制运算程序通过一定时间的运算,控制舵机方向,然后沿着航线进行巡航。到达航点后,机器人进入停止状态,进行一些必要的监测,然后读取存储区内的下一个航点,通过控制运算程序进行调整方向,继续导航。机器人到达最后一个航点后,立即进入停止状态,然后进行回程的功能,在回程中再次进行监测,把数据传输给上位机。系统程序图如图3所示。
实验结果
为了验证系统功能,在校内进行了多次测试;经过多次程序的调整,实现了导航、避障、图像采集与处理、云台控制和网络通信等功能。下图为机器人图。

侧视图
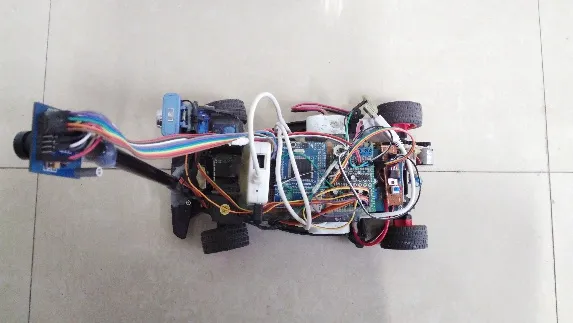
俯视图
结束语
本文设计的基于wifi的智能变电站巡检机器人系统充分利用了智能车的机动性高、稳定性好、易操控等特点,通过WIFI连接智能车,实现实时、高效、自动巡检变电站。通过智能车的帮助,值班人员可以详细、彻底地了解变电站内的信息。同时可以把信息保存,方便以后的研究,对于变电站的安全可靠运行起到积极的作用。
张强(1994-)男,本科,测控技术与仪器;教师简介:胡立夫,男,高级工程师。胡立夫,男,高级工程师。
辽宁省大学生创新项目(项目编号:DCX140706)
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中国交通信息化(2022年9期)2022-10-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
汽车工程师(2021年12期)2022-01-18
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
电子制作(2019年10期)2019-06-17
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
汽车维修与保养(2015年8期)2015-04-17