
含输入时滞的电动汽车悬架系统有限频域振动控制的研究
2016-08-04 06:13陈长征于慎波
振动与冲击 2016年11期
陈长征, 王 刚, 于慎波
(1. 沈阳工业大学 机械工程学院,沈阳 110870; 2. 辽宁省振动噪声控制技术工程研究中心,沈阳 110870)
含输入时滞的电动汽车悬架系统有限频域振动控制的研究
陈长征1,2, 王刚1, 于慎波1
(1. 沈阳工业大学 机械工程学院,沈阳110870; 2. 辽宁省振动噪声控制技术工程研究中心,沈阳110870)
由于轮毂电机驱动的电动汽车的驱动系统安装在轮毂处,使得汽车悬架系统簧下质量增加,造成舒适性变差及电机轴承磨损严重等问题。基于上述现象,并综合考虑控制回路的输入时滞及参数摄动因素,研究了该类悬架系统的有限频域动态输出反馈振动控制策略。对比于传统的时滞全频域的H∞控制方法,该方法能在人体对振动较为敏感的频段内取得更好的干扰衰减,同时也能保证相关的时域硬约束。为了降低车身加速度在非簧载模态频率处的奇异值,并减少传递到电机轴承上的力,考虑将动力吸振器(DVA)安装在电机轴承座上。通过Lyapunov-Krasovskii泛函及广义KYP引理,以线性矩阵不等式的形式推导出基于动态输出反馈的控制准则。最后,通过一个数值实例验证该方法在频域及时域的有效性。
有限频域振动控制;主动悬架;输入时滞;广义KYP引理;H∞控制
随着汽车工业的发展,以节能环保为主题的新能源汽车已经成为行业开发的主要趋势,诸如混合动力汽车及纯电动汽车等一系列车型。而在纯电动汽车当中,基于轮毂电机驱动的电动汽车具有其独特的性能优势,除了可精确而快速的控制每个轮的转矩外,还可提高汽车的稳定及操纵等运动性能[1],然而由于其驱动系统安装在轮毂处,使得簧下质量增加,且电机轴承直接承受着车身的重量,不仅造成舒适性变差,也造成电机轴承磨损严重等问题[2]。在路面的干扰下,轮胎传递到轮毂轴心的相对位移也会影响到电机的控制精度,诸多问题限制了该类型电动汽车的发展。由于悬架系统的各性能间存在一定的矛盾关系,诸如舒适性与悬架动行程及接地性等[3],研究先进的控制方法来实现汽车悬架的多目标优化,一直是近年来的研究热点。随着一种考虑约束限制的H∞控制方法的提出,大部分学者都将其应用于悬架的振动控制当中[3-6]。该方法能在保证行程约束的情况下,最大化的在全频域内提高悬架的舒适性。然而根据国际ISO2361标准,人体对4~8 Hz范围内的振动最为敏感,且汽车的舒适性与该范围内的车身振动加速度密切相关[7-9],如何将控制目标限定在低频范围内,以实现悬架性能的权衡一直是一个难点问题。日本学者Iwasaki等[10]提出了广义KYP引理,建立了频域不等式与时域不等式的等价关系,为实现有限频域控制提供了一种有效的方法。Sun等[7]应用该引理实现了汽车悬架系统的有限频域多目标控制,结果表明该方法优于传统的全频域方法。Zhang[11]将其应用于结构抗震控制当中。考虑到在实际的应用当中,控制回路不可避免的存在时滞现象,而输入时滞对系统的性能有很大的影响,甚至会导致控制系统失稳[12-14]。因此在设计悬架系统的控制方法时,输入时滞是必须要考虑的因素。文献[12-13]分别针对汽车悬架及座椅悬架设计了考虑输入时滞的全频域状态反馈控制器,在一定时滞范围内,取得了很好的减振效果。文献[9]通过广义KYP引理提出了处理时滞悬架的有限频域状态反馈控制方法。考虑到全状态反馈成本过高,安装不便等问题,实际应用难以实现,文献[14]提出了基于动态输出反馈的时滞全频域H∞控制方法,结果表明对于选择的可测状态量,该方法在存在可行解的条件下,满足一切性能要求。
基于上述分析,有必要研究考虑输入时滞的轮毂电机驱动电动汽车主动悬架系统的动态输出反馈控制策略。故本文针对该类型的主动悬架模型,结合动力吸振器,综合考虑输入时滞及参数摄动项,应用广义KYP引理推导出了基于动态输出反馈的有限频域H∞鲁棒控制准则,并将其应用于该类型电动汽车悬架系统的多目标控制当中,最后通过一个数值实例验证了该方法的有效性。
符号标记:PT、PH、P-1分别表示矩阵P的转置、共轭转置、逆,(P)s=P+PT,P≻0、P<0表示其分别为正定、负定矩阵,P⊗Q表示矩阵的克罗内克积,*表示矩阵的相应对称块矩阵,N{·}表示{·}的零空间,n表示n维的复空间,Hn表示n×n维哈密顿矩阵,Sn表示n×n维的实对称矩阵,diag[·]表示对角矩阵,L2[0∞)表示平方可积的矢量函数空间。
1问题描述及必要引理
为了便于研究系统的动态特性,将图1所示的物理模型简化为如图2所示的1/4主动悬架模型。其中ms、md、ma、mu分别代表簧载质量、动力吸振器质量、悬架臂和刹车部件及电机轴承座的集中质量、非簧载质量,ks、kd、ka、ku分别为悬架刚度、动力吸振器刚度、轮毂电机轴承处弹性支承的刚度、轮胎刚度,cs、cd为悬架阻尼及动力吸振器阻尼,u(t-d)为含输入时滞d的主动控制力,xs、xd、xa、xu分别为簧上质量的位移、动力吸振器位移、轮毂轴心位移,非簧载质量位移,q为路面不平度激励。

图1 /4电动汽车主动悬架系统物理模型原理图Fig.1 Schematic diagram of the physical quarter-car model of electric vehicles active suspension

图2 基于DVA的主动悬架1/4车模型Fig.2 Quarter vehicle suspension model of an in-wheel motor driven electric vehicle with DVA
这里选取上述悬架系统的状态变量为
x(t)=[x1x2x3x4x5x6x7x8]T
(1)

则如图2所示的主动悬架系统可用如下的状态空间方程描述:

(B +ΔB)u(t-d)+B1ω(t)
(2)
其中
这里定义待设计的全阶动态输出反馈控制器形式如下:
(3)


将上述性能指标归一化并用下式描述为:
(4)
这里z1(t)为系统的控制输出,代表车身垂直加速度,z2(t)为归一化的系统约束函数。其中
M=ms+md+ma+mu
结合式(2)~(4),可得:
(5)
其中:
这里要求上述的闭环系统(5)在干扰能量及时滞有界的情况下满足:
(6)

为了得到本文的主要结论,这里首先介绍下列重要的引理。
引理1[11]假定F为实矩阵,Θ为一对称矩阵,这里定义Φ∈S2、Ψ∈Η2,Λ(Φ,Ψ)为复平面上一条曲线,则下面两个表述互相等价:
(1) 若s∈Λ(Φ,Ψ),且对于所有的非零(u,υ)∈NLsF,有
(7)
(2) 对于所有的非零(u,υ)∈NLsF,存在对称矩阵P,Q>0使得如下不等式成立:
FH(Φ⊗P+Ψ⊗Q)F+Θ<0
(8)

引理2[9]对于x∈RnP∈Sn,H∈Rm×n,若H的秩小于n,则下面表述等价:
xTPx<0,∀Hx=0,x≠0,
⟺∃Y∈Rn×m,P+YH+[YH]T<0
引理3[16]给定对称矩阵Q及一般矩阵H、R,若Q+HΣR+RTΣTHT<0∀ΣΣT≤I,当且仅当存在常数λ>0,使得Q+λ-1HHT+λRTR<0。
2有限频域控制结果
(9)
(10)
(11)
(12)
其中:

证明当ω(t)=0时,考虑如(13)所示的Lyapunov Krasovskii泛函:
(13)
其中P1>0、S1>0、R1>0,对上式求导可得:
这里应用Jensen不等式[15]来处理上式中的积分项,则可得
(14)

(15)

(16)
这里ξ(t)=(ζT(t)ωT(t))T,为了建立频域不等式,这里将ξ(t)进行傅里叶变换,并根据Parseval等式[9]可得:
(17)

(18)
应用schur补定理可将式(18)转换为式(11),式(12)形式,故定理1得证。

这里取LMI变换矩阵为:
(19)
将式(19)中的Δ1、Δ2、Δ3、Δ4及其转置分别对式(9)~(12)进行同余变换,并定义如下变量矩阵:
(20)
可得如下推论。
(21)
(22)
(23)
(24)
其中
通过求解推论1,若存在可行解,则通过求解下列等式可唯一的确定控制器参数矩阵。

3数值实例分析
为了研究该方法的可行性,将推论1应用到含输入时滞的轮毂电机驱动电动汽车悬架系统的多目标控制当中,并与文献[14]中处理时滞的全频域动态输出反馈方法进行比较。总求解目标可归结为如式(25)所示的凸优化问题。通过内点法求解式(25),可得到悬架系统在有限频段内的次优H∞性能指标,相关的悬架系统仿真参数见表1。
minγ2

(25)

表1 主动悬架系统参数
3.1频域分析

图3 车身振动加速度奇异值响应曲线Fig.3 MSVs response of body acceleration


图4 (xa-xu)/xaumax的奇异值响应曲线Fig.4 MSVs response of (xa-xu)/xaumax
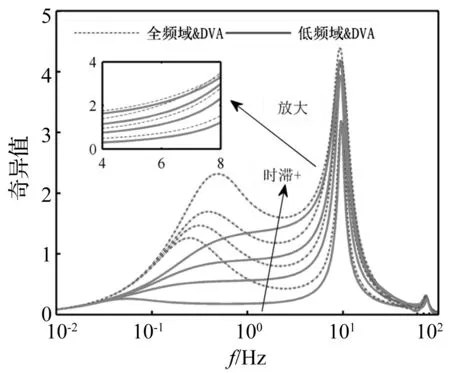
图5 不同时滞下的加速度频响Fig.5 Frequency responses of body acceleration for different delay

图6 不同时滞下的(xa-xu)/xaumax频响曲线Fig.6 Frequency responses of (xa-xu)/xaumax for different delay

3.2时域分析
为了进一步分析该方法对时域的硬约束响应情况,这里选择的路面输入为短时的包块冲击激励,其导数可用如下公式描述[8]:
(26)

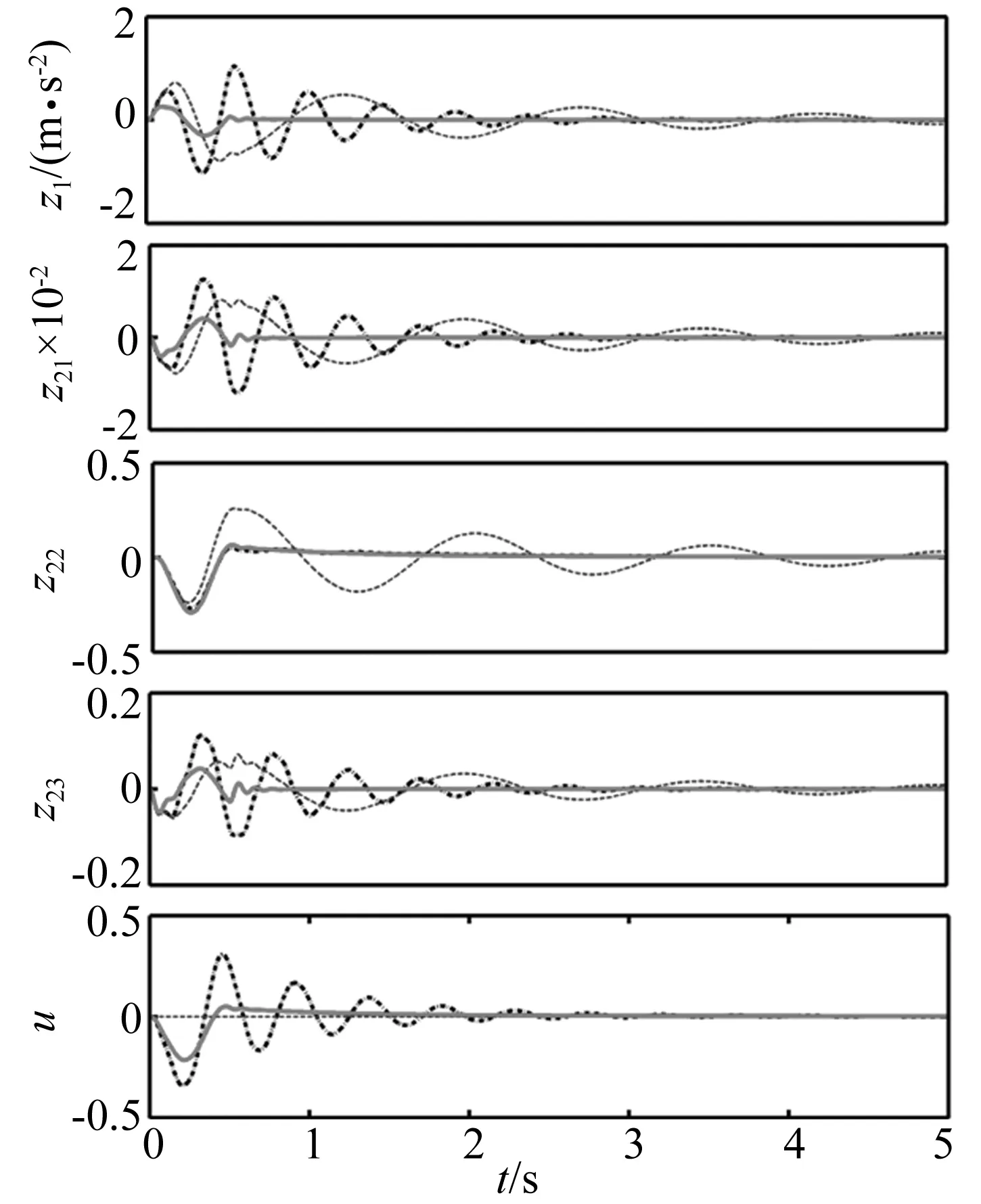
图7 主动悬架控制输出包块时域响应Fig.7 Bump response of controlled output for active suspension

(27)
式(27)中选择激励时间T=10 s。表中控制器Ⅰ,Ⅱ,Ⅲ分别对应低频域&DVA,全频域&DVA,无控三种控制方法,从表中可看出,当时滞项依次增大时,在随机路面激励下,有限频域的方法在各项性能指标上依然优于传统的全频域方法。

表2 加速度均方根值

表3 (xa-xu)/xaumax均方根值

表4 悬架动行程比均方根值
4结论
本文针对轮毂电机驱动的电动汽车存在舒适性差及电机轴承磨损和控制精度等问题,研究了在该特定模型下的悬架低频振动控制策略,且考虑到实际应用当中,控制回路含输入时滞及参数摄动现象,综合上述因素,在匹配人体对振动较为敏感的特定频段内,结合动力吸振器,应用广义Kalman-Yakubovich-Popov (KYP) lemma,以线性矩阵不等式(LMI)的形式推导出基于动态输出反馈的有限频域H∞鲁棒控制准则,理论分析与数值仿真验证了该方法在频域及时域的有效性,与传统的时滞全频域方法相比,更好的抑制了低频处的振动,使得舒适性得到了很大的提高,且限制了轮胎传递到轮毂轴心的相对位移,为该类型的电动汽车悬架问题提供一种新的解决方案,注意到在该方法中,存在可调参数,使得该问题仅能得到次优解,如何优化可调参数得到问题的最优解,也是需要考虑的因素。
[ 1 ] Wang R, Chen Y, Feng D, et al. Development and performance characterization of an electric ground vehicle with independently actuated in-wheel motors[J]. Journal of Power Sources, 2011, 196(8): 3962-3971.
[ 2 ] Wang R, Jing H, Yan F, et al. Optimization and finite-frequencyH∞control of active suspensions in in-wheel motor driven electric ground vehicles[J]. Journal of the Franklin Institute, 2015, 352(2): 468-484.
[ 3 ] Chen H, Guo K H. ConstrainedH∞control of active suspensions: an LMI approach[J]. IEEE Transactions on Control Systems Technology, 2005, 13(3): 412-421.
[ 4 ] 李荣, 焦晓红, 杨超. 基于动态输出反馈的半车主动悬架系统鲁棒控制[J]. 振动与冲击,2014, 33(7): 187-193.
LI Rong, JIAO Xiao-hong, YANG Chao. Output feedback-based robust control for a half-car hydraulic active suspension system[J]. Journal of Vibration and Shock, 2014, 33(7): 187-193.
[ 5 ] Li P, Lam J, Cheung K C. Multi-objective control for active vehicle suspension with wheelbase preview[J]. Journal of Sound and Vibration, 2014, 333(21): 5269-5282.
[ 6 ] Guo L X, Zhang L P. RobustH∞control of active vehicle suspension under non-stationary running[J]. Journal of Sound and Vibration, 2012, 331(26): 5824-5837.
[ 7 ] Sun W, Gao H, Kaynak O. Finite frequencyH∞control for vehicle active suspension systems[J]. IEEE Transactions on Control Systems Technology, 2011, 19(2): 416-422.
[ 8 ] Sun W, Li J, Zhao Y, et al. Vibration control for active seat suspension systems via dynamic output feedback with limited frequency characteristic[J]. Mechatronics, 2011, 21(1): 250-260.
[ 9 ] Sun W, Zhao Y, Li J, et al. Active suspension control with frequency band constraints and actuator input delay[J]. IEEE Transactions on Industrial Electronics, 2012, 59(1): 530-537.
[10] Iwasaki T, Hara S. Generalized KYP lemma: unified frequency domain inequalities with design applications[J]. IEEE Transactions on Automatic Control,2005,50(1): 41-59.
[11] Zhang H, Wang R, Wang J, et al. Robust finite frequencyH∞static-output-feedback control with application to vibration active control of structural systems[J]. Mechatronics, 2014, 24(4): 354-366.
[12] Du H, Zhang N.H∞control of active vehicle suspensions with actuator time delay[J]. Journal of Sound and Vibration, 2007, 301(1-2): 236-252.
[13] Zhao Y, Sun W, Gao H. Robust control synthesis for seat suspension systems with actuator saturation and time-varying input delay[J]. Journal of Sound and Vibration,2010,329(21): 4335-4353.
[14] Li H, Jing X, Karimi H. Output-feedback-basedH∞control for vehicle suspension systems with control delay[J]. IEEE Transactions on Industrial Electronics, 2014, 61(1): 436-446.
[15] Ali M S, Saravanakumar R. Novel delay-dependent robustH∞control of uncertain systems with distributed time-varying delays[J]. Applied Mathematics and Computation, 2014, 249: 510-520.
[16] Wu M, He Y, She J H, et al. Delay-dependent criteria for robust stability of time-varying delay systems[J]. Automatica, 2004, 40(8): 1435-1439.
Finite frequency domain vibration control for suspension systems of electric vehicles with actuator input delay
CHEN Chang-zheng1,2, WANG Gang1, YU Shen-bo1
(1. School of Mechanical Engineering, Shenyang University of Technology, Shenyang 110870, China;2. Liaoning Engineering Center for Vibration and Noise Control, Shenyang 110870, China)
For an in-wheel motor driven electric vehicle, its driving system is installed on the wheel hub position and the unsprung mass of the vehicle suspension system increases, they may severely deteriorate the riding comfort and cause problems like severe wear of motor bearings. Considering the above phenomena and the input delay and parametric uncertainties of control loop, the finite frequency domain dynamic output-feedback vibration control strategy for this kind of suspension system was studied. Compared with the traditional entire frequency domainH∞control approach, the proposed approach could achieve a better disturbance attenuation within a frequency band where a human body was more sensitive to vibration. Meanwhile, the related time-domain rigid constraints were also guaranteed. In order to minimize the singular value response of the vehicle body acceleration at the unsprung mass modal frequency and reduce the force transmitted to the motor bearing, a dynamic vibration absorber (DVA) was installed at the motor bearing seat. Using the generalized Kalman-Yakubovich-Popov(KYP) lemma and Lyapunov-Krasovskii functional, the control criterion based on dynamic output-feedback was derived in the form of LMIs. At last, a numerical example was given to verify the effectiveness of the proposed control method in frequency domain and time domain.
finite frequency domain vibration control; active suspensions; input delay; generalized KYP lemma;H∞control
10.13465/j.cnki.jvs.2016.11.020
国家自然科学基金(51175350)
2015-02-28修改稿收到日期:2015-06-04
陈长征 男,博士,教授,博士生导师,1964年生
王刚 男,博士生,1990年生
TP271;O328
A
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
上海涂料(2021年5期)2022-01-15
成都信息工程大学学报(2021年1期)2021-07-22
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
自动化学报(2019年6期)2019-07-23
北方工业大学学报(2019年5期)2019-03-30
雷达学报(2018年3期)2018-07-18
制造技术与机床(2017年10期)2017-11-28
北京航空航天大学学报(2017年3期)2017-11-23
制造业自动化(2017年2期)2017-03-20
