
异类传感器数据融合系统的模型设计与实现*
2016-08-10 03:23孙晓峰郭徽东
舰船电子工程 2016年7期
关键词:坐标转换
孙晓峰 郭徽东
(1.海军702厂 上海 200434)(2.92403部队51分队 福州 350007)
异类传感器数据融合系统的模型设计与实现*
孙晓峰1郭徽东2
(1.海军702厂上海200434)(2.92403部队51分队福州350007)
摘要异类多传感器数据融合是传感器信息处理的重要形式,以主被动传感器为基本组成。给出异类传感器数据融合中传感器空间配置、坐标转换、数据关联和被动跟踪等模型,设计了异类传感器数据融合算法流程,并利用实测数据进行验证,结果证明了模型在实际应用中的适用性和实践性。
关键词异类传感器; 被动跟踪; 数据关联; 坐标转换
Class NumberTP274
1引言
异类多传感器信息融合,是指针对同一目标,处于不同位置的同类或异类的多个传感器产生的信息加以综合,消除传感器之间可能存在的冗余和矛盾的信息,加以互补,提升其可靠性,从而形成目标相对完整一致的感知描述。系统中涉及对目标的时间统一、坐标转换,到传感器方位关联、特征信息融合等要素,由于传感器所获取的目标信息是不同维、不同地、不同时的,要对这些数据进行统一处理、优化是件复杂的事情[1~2]。本文通过坐标转换、方位关联和滤波定位实现对目标精确定位、有效融合的目的。
2传感器空间配置
2.1同地配置的主被动传感器
当主动传感器与被动传感器同地配置时,如果二者位于一阵地,则所配置的主、被动传感器站址基本一致,相对目标距离而言,站址之间的距离可以忽略不计(见图1)。
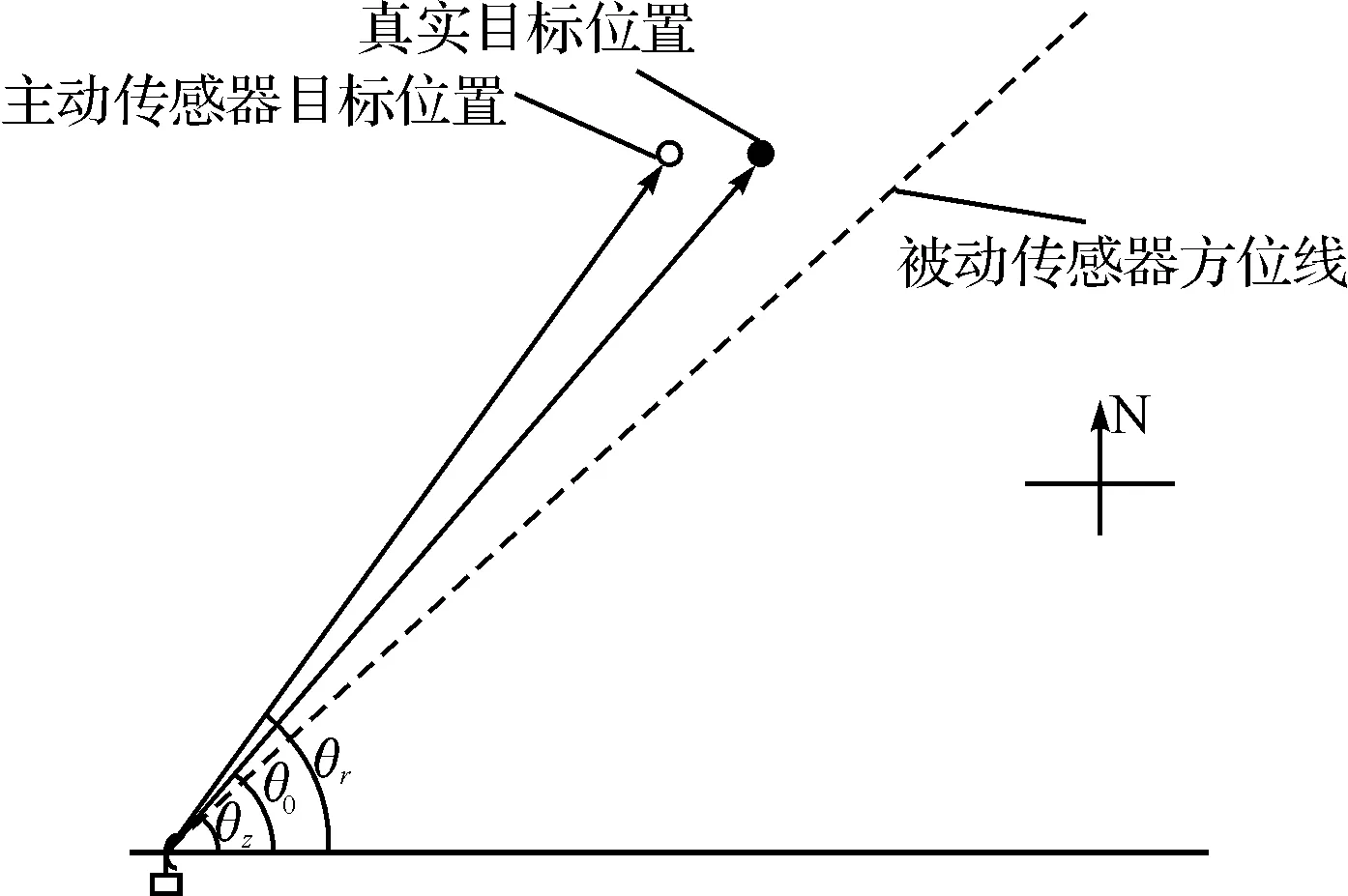
图1 同地配置的主、被动传感器
2.2异地配置的主被动传感器
异地配置的主被动传感器配置中,由于主动传感器与被动传感器之间的站址相距较远,对来自主动传感器的目标信息先进行坐标转换,再对主动传感器、被动传感器掌握的目标数据信息进行统计处理[3]。
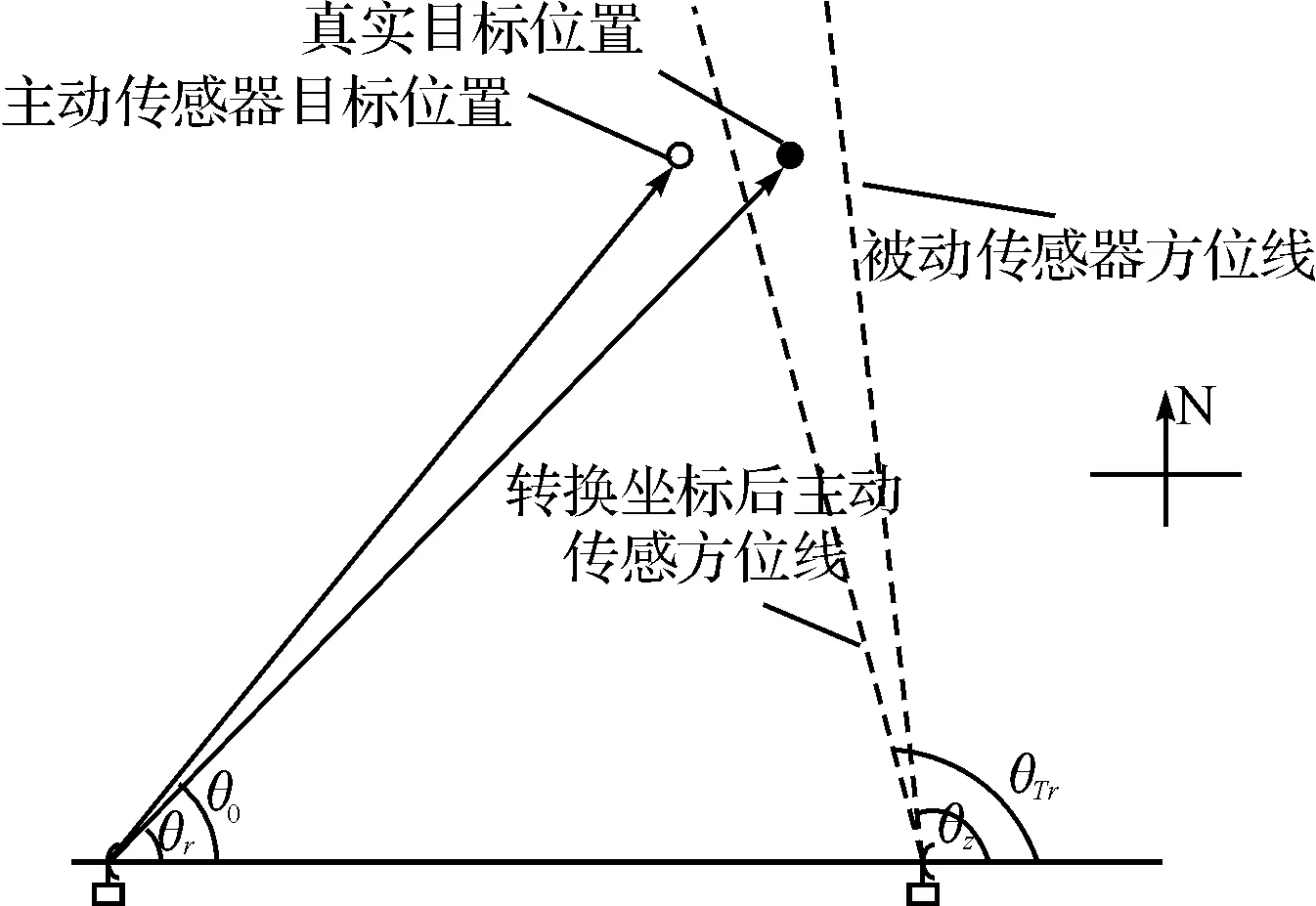
图2 异地配置的主、被动传感器
3异类传感器数据融合模型
3.1纯方位关联
主动传感器与被动传感器的数据融合是典型的异类多传感器数据融合,即纯方位目标数据关联。在敌方辐射电磁波或施放干扰时,利用侦察雷达对其他雷达实施引导,主动雷达和侦察雷达可以相互告警、印证和信息融合。
被动传感器在某一方位(多个方位)侦察到目标信号,主动传感器在该方位线(如果两传感器为异地配置,须为转换坐标后的方位线)附近发现和跟踪多批海上目标,当目标距较远时,通过现有的手段和方式对目标进行识别较困难,特别是仅主动传感器发现目标时。由于被动传感器目标方位线附近可能有多个主动传感器目标航迹,而一个被动传感器目标至多可以和一个主动传感器目标相关联,某一时刻被动传感器航迹方位测量值与该时刻主动传感器目标航迹的方位值(或转换坐标后的方位值)的测量误差相互独立。因而,一个被动传感器航迹和多个主动传感器目标航迹的关联问题可化成如下的判决问题:
YES:主动传感器航迹和所有被动传感器航迹不相关;
NO:主动传感器航迹和某个被动传感器航迹相关。
累计被动传感器一段时间内可用于和主动传感器航迹关联的方位状态,则可以得到统计意义上的方位比较数据序列,计算出关联判别函数,再结合关联判别函数和门限规就可实现“真假目标”的判决。判决函数计算和门限见文献[1~2]。
3.2被动定位
单个被动传感器对目标进行探测时,只能对目标的初始距离进行大致的估计,估计误差过大容易造成传统方法的收敛速度慢、跟踪精度下降甚至发散。结合扩展卡尔曼滤波,对多个被动传感器采用多假设距离扩展卡尔曼滤波方法[3](Multihypothesis Range-Parameterised Extended Kalman Filtering,MHRKF)可以得到较好的效果。MHRKF主要思想是对目标进行NH个初始距离的假设,利用滤波器并行运算的方法对目标进行跟踪,根据各滤波器运算中得到的残差进行滤波器的概率计算,最后得到目标的状态组合估计。
各滤波器对应的初始概率权值为[3]
(1)
式中,j为滤波器序号,dR(j,1)为各滤波器的距离空间长度。根据贝叶斯准则,概率更新计算可表示为
(2)
其中
(3)
(4)
3.3坐标转换
由于地球是一个近似椭圆的球体,当传感器之间节点距离很远时,首先采用WGS84模型节点1直角坐标系转换到地心空间直角坐标系[4]:
(5)
然后,目标坐标由地心空间直角坐标转换到节点2直角坐标,转换关系为
(6)
(X1,Y1,Z1)、(X2,Y2,Z2)分别是节点1、2坐标原点在地心空间直角坐标系中的坐标。(B1,L1)、(B2,L2)分别为节点1,2坐标原点的经纬度。
WGS84模型的空间大地坐标系转换到地心空间直角坐标系的公式为
(7)
4算法流程
上述讨论的是仅利用目标位置信息实现主动传感器和被动传感器的信息融合,在实际的信息处理中,在得到目标属性、类型以及其他途径传递和共享的信息,综合利用这些目标的相关信息,从而进一步实现多信息源融合。这里给出主被动传感器信息融合流程:

图3 主被动传感器数据融合流程
1) 掌握主动传感器、被动传感器是否发现可疑目标信号;
2) 按威胁序列,选择一批被动传感器目标方位甄别或进行交叉定位;
3) 针对该批目标,选择方位线附近主动传感器目标批号;
4) 如果交叉定位点存在,实施航迹关联,否则,跳至8)执行;
5) 如果与被动传感器同地配置,判断主动传感器、发现的目标方位是否在被动传感器目标方位线左右允许范围内;
6) 如果与被动传感器异地配置,将主动传感器目标位置信息转换到被动传感器坐标系;判断该目标方位是否在被动传感器目标方位线左右允许范围内;
7) 对被动传感器、主动传感器目标统计、编批,方位序列统计,进行关联函数判别,门限筛选;
8) 接收来自相关部门的目标属性信息,进行属性匹配;
9) 得出判别结果;返回2)继续执行。
5仿真与实现
5.1模块功能
从系统开发的角度出发,使系统按功能逐次分割成层次结构,使每一部分完成简单的功能且各个部分之间又保持一定的联系,在设计阶段,基于这些功能的层次结构把各个部分组合起来成为系统。系统流程中实现传感器单多目标跟踪、坐标转换、目标关联、航迹数据融合等功能。系统模块结构如图4。
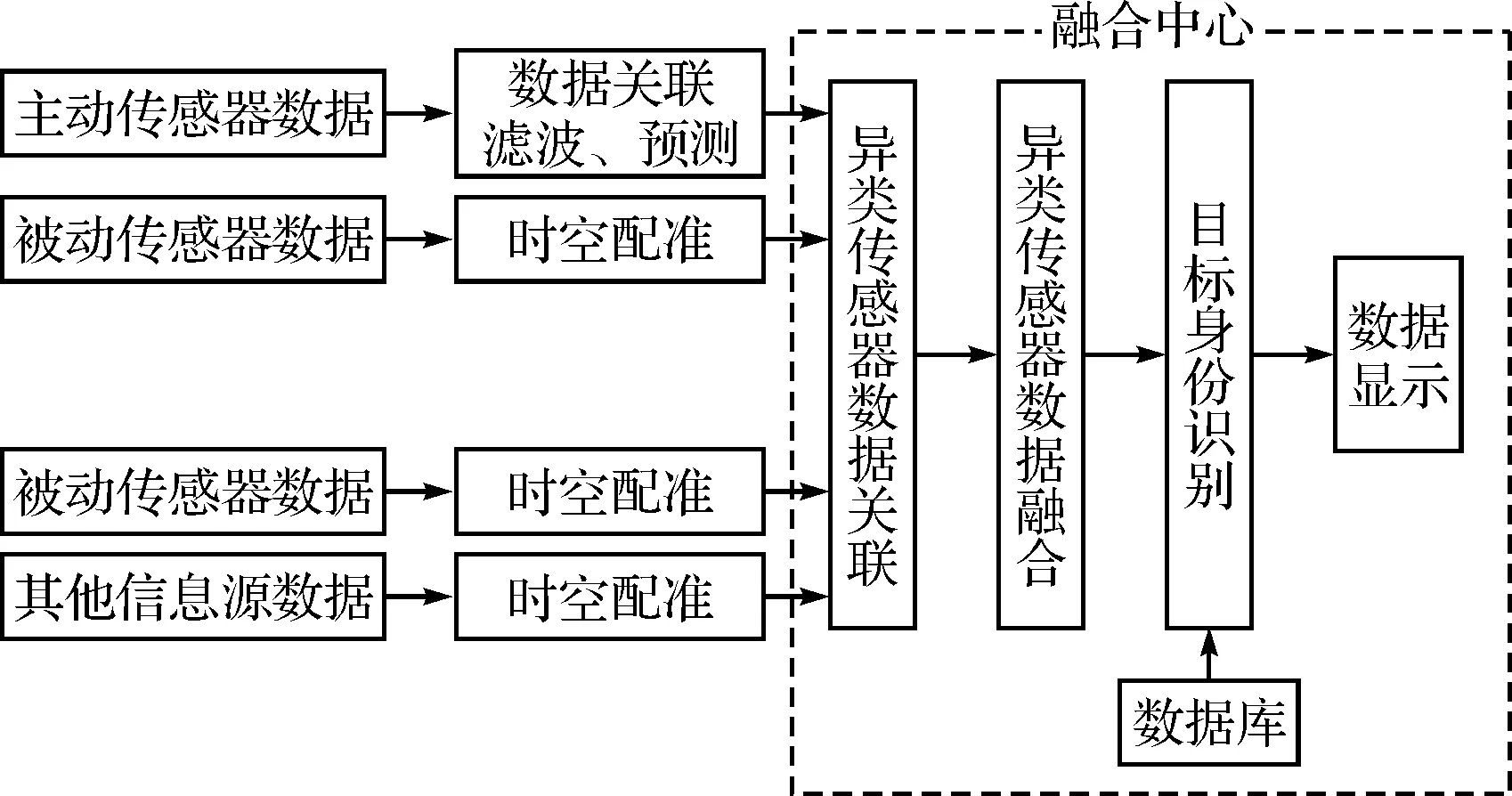
图4 系统模块结构
5.2算法实现
工程应用上算法的成熟度对系统的稳定性影响最大,新颖的算法在没有经过实际检验的基础上,不能作为系统的优先选择,如目前国内外流行的粒子滤波方法[6],还不能作为被动跟踪的工程应用模型;其次要合理贴近实际使用环境和背景,满足成熟和实用性的要求。本节利用实测数据对第3节中异类传感器数据关联、被动目标跟踪等模型进行验证。
图5为传感器异地配置下实测目标方位关联判决概率,可以看出,判决概率远高于计算得出的门限值,即认为主被动传感器所比对的目标为同一目标。通过比较不同间距目标的判决结果:目标关联相似度随目标的间距增大而下降,目标的间距(方位)小,则判决所需采样次数多;关联相似度和目标间距有关。在主被动传感器对目标跟踪稳定条件下,方位关联正确性可以达到90%以上;能够满足对小间距条件下辐射源目标的关联判断。
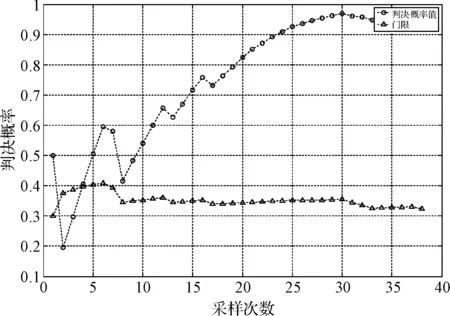
图5 目标实测数据方位关联判决概率
图6为实测目标数据的被动滤波定位航迹,MHRKF滤波方法采用3~5个滤波器进行并行运算,根据每个滤波器所得到的误差阵选取不同的权值因子进行加权融合,对大范围内的目标都有较高的定位精度;特别是侦察站几何位置布置相对于目标实际航迹点不理想时,MHRKF方法比单Kalman方法精度高得多,经统计分析MHRKF方法在实际目标滤波定位的精度比Kalman方法提高约30%左右。图5、图6表明了算法在海上目标实际测量数据应用中是有效的,能够对目标进行关联判别和定位。
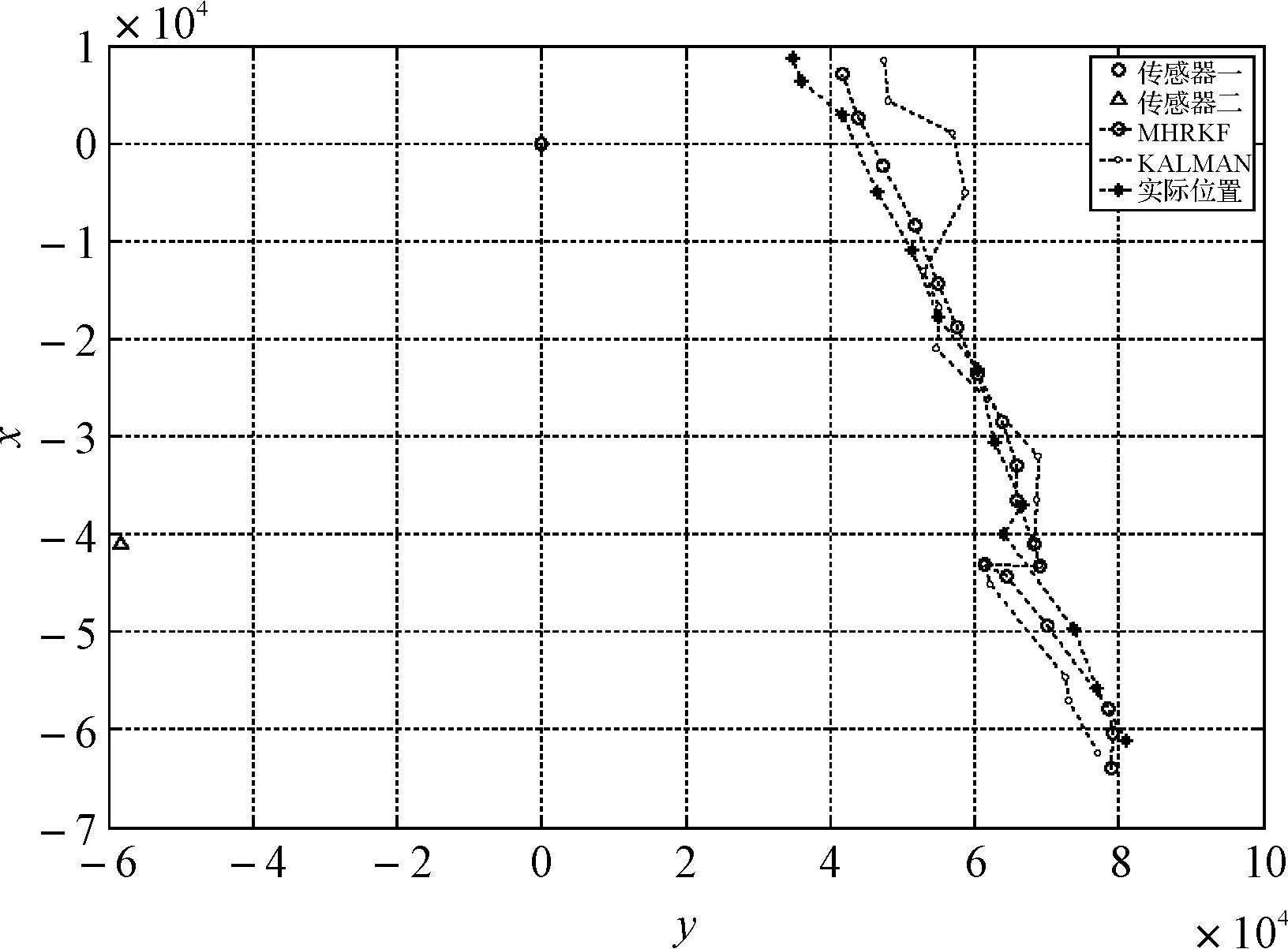
图6 目标实测数据被动滤波航迹图
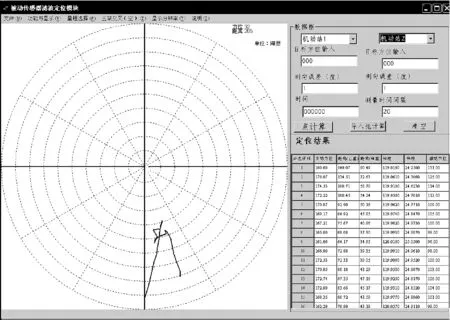
图7 被动传感器滤波实测定位模块界面
图7、图8分别为实测条件下MHRKF方法、坐标转换和关联判别方法在被动传感器滤波定位模块和主被动传感器关联模块中应用实现的界面。
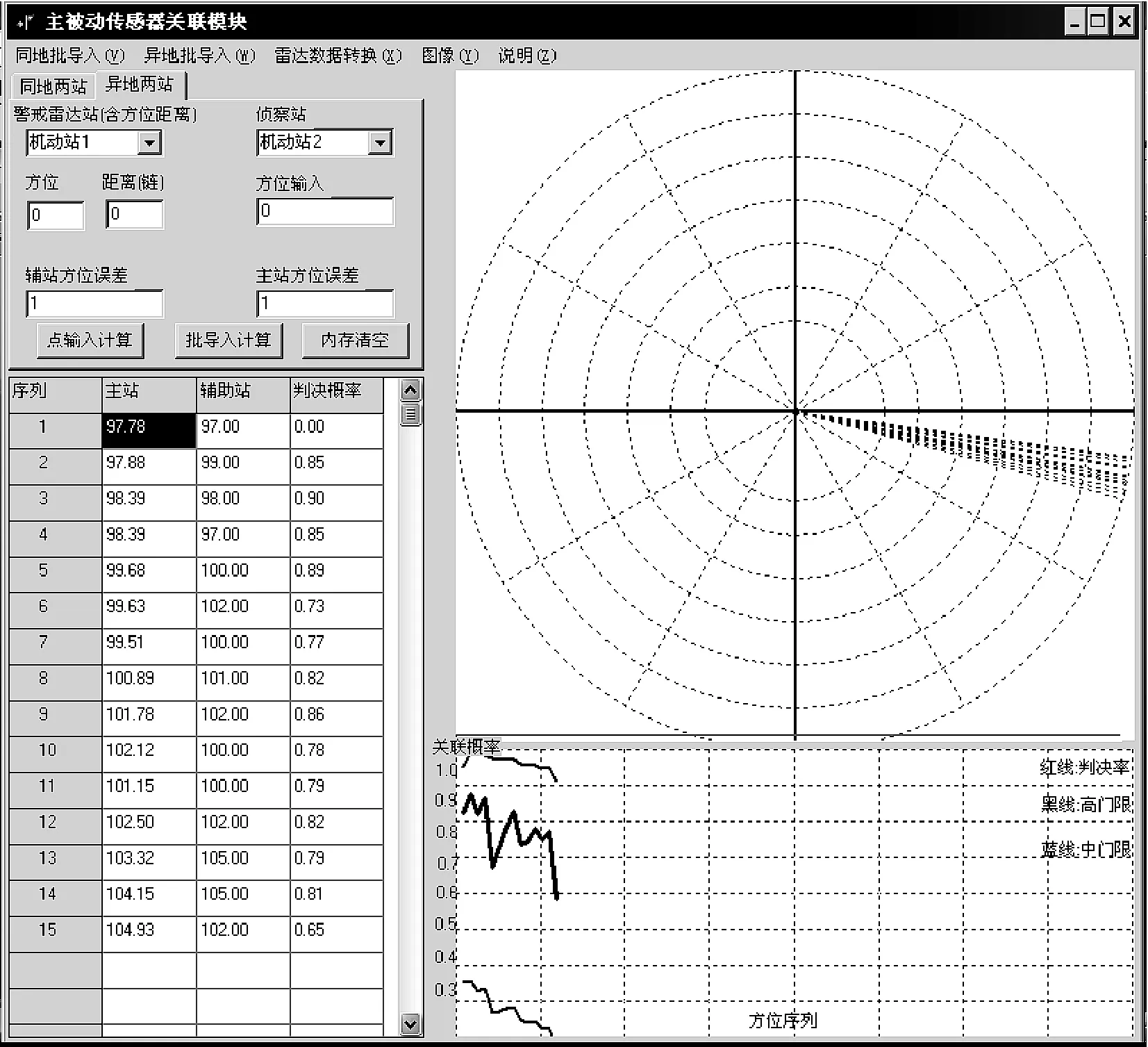
图8 主被动传感器实测关联模块界面
6结语
本文设计和给出了异类传感器数据融合模块和算法流程,并通过实测数据进行了算法的验证。结果表明,通过不同传感器之间算法选择和流程设计,能够对目标的数据关联、被动跟踪等进行有效处理,可以在异类传感器系统信息处理系统中进行实际应用,表明了算法模型的有效性。
参 考 文 献
[1] 郭徽东,章新华.雷达和ESM相关的仿真研究[J].系统仿真学报,2002(8):975-977.
[2] 王国宏,邵锡军.主被动传感器异地配置下的数据关联[J].现代雷达,2003(4):26-29.
[3] N peach, M A Ceng. Bearings-only tracking using a set of range-parameterised extended Kalman filters[J]. IEE Proceeding of control theory application,1995,142(1): 73-80.
[4] 李杰涛,郭敏.雷达组网中的坐标转换问题[J].火控雷达技术,2007(3):38-42.
[5] Deb S, Pattipati K R,Bar-Shalom Y. A multisesor-multitarget data association algorithm for hetero-geneous sensors[J]. IEEE Trans on AES,1993,29(2):560-5686.
[6] R V Merwe,A Doucet, N De Freitas. The Unscented Particle Filter[R]. Technical Report,Cambridge University Engineering Department, 2000. Also in: Adv Neural Inform Process System,2000.
收稿日期:2016年1月6日,修回日期:2016年2月27日
作者简介:孙晓峰,男,研究方向:电子通信装备技术保障。
中图分类号TP274
DOI:10.3969/j.issn.1672-9730.2016.07.012
Model Design and Application of Dissimilar Sensor Data Fusion System
SUN Xiaofeng1GUO Huidong2
(1.Factory 702 of Navy, Shanghai200434)(2.Unit 51, No.92403 Troops of PLA, Fuzhou350007)
AbstractMultiple dissimilar sensor data fusion is the unit of modern information fusion, passive sensor and active sensor is the main part of the fusion system. Some data fusion models is set up which provides efficient ways to solve the problems of multisensor information fusion. To the complex and ideal practical circumstance of engineering, multi-kalman filtering, track correlation algorithm and coordinate transformation algorithm are provided. Simulation results show that these algorithms are effective and practical.
Key Wordsdissimilar sensor, passive tracking, data association, coordinate transformation
猜你喜欢
城市地理(2017年9期)2017-11-02
现代电子技术(2017年14期)2017-07-25
智能计算机与应用(2017年3期)2017-07-15
科技创新导报(2017年11期)2017-06-15
电子技术与软件工程(2017年11期)2017-06-10
科技创新与应用(2017年16期)2017-06-10
价值工程(2017年8期)2017-03-25
环球人文地理·评论版(2016年8期)2017-01-19
现代电子技术(2015年18期)2015-09-16
