双绕组永磁容错电机不同故障容错控制策略的比较研究
2016-08-10 06:17白洪芬朱景伟孙军浩周博文李小庆大连海事大学轮机工程学院大连116026
电工技术学报 2016年13期
白洪芬 朱景伟 孙军浩 周博文 李小庆(大连海事大学轮机工程学院 大连 116026)
双绕组永磁容错电机不同故障容错控制策略的比较研究
白洪芬朱景伟孙军浩周博文李小庆
(大连海事大学轮机工程学院大连116026)
在分析双绕组三相永磁容错电机基本结构的基础上,讨论了电机在开路和短路故障情况下的转矩脉动和铜耗。详细论述了加倍增加对应相电流容错控制策略、最优转矩容错控制策略和电流矢量容错控制策略的实现方法。通过数学计算和仿真比较分析了3种容错控制策略的性能和优缺点。硬件实验结果验证了所提出的电流矢量容错控制策略的正确性和可行性。
双绕组永磁容错电机开路故障短路故障容错控制策略
0 引言
永磁容错电机(Fault-Tolerant Permanent Magnet Motor,FTPMM)既具有永磁同步电机效率高、体积小、噪声小的优点,又具有开关磁阻电机的高可靠性和故障容错性能[1],因此,被广泛应用于航空航天、船舶运输及医学等对推进系统要求较高的领域。
1995年,英国Newcastle大学首次提出永磁容错电机的控制方案[2]。随后,文献[3-7]相继提出了查表法、最优转矩和最优电流故障容错控制策略,保证电机在故障情况下能输出额定转矩,实现了电机驱动系统的容错控制。文献[8]提出了FTPMM无故障时的解耦控制算法。文献[9]提出了四相FTPMM在正常状态和开路故障状态下的电压空间矢量控制策略。文献[10-13]设计了六相FTPMM,分别采用矢量控制和直接转矩控制实验实现了电机在正常、开路和短路状态时的最优转矩控制及最优电流控制。文献[14]将六相FTPMM用于电动汽车中,以转矩波动最小为目标采取最优电流控制策略分析故障情况,并通过仿真验证。文献[15,16]针对四相FTPMM分别提出单相开路和短路的故障容错策略,通过仿真验证容错策略的正确性,但未进行实验验证。
虽然单电机容错系统可有效提高系统的可靠性,但驱动系统电源故障和控制器故障会使整个系统失去驱动能力。为此,文献[17]提出了双余度永磁容错电机的拓扑结构。在该拓扑结构中两个相同的FTPMM共轴连接,每个电机采用独立的供电电源、控制器和反馈系统,即使其中一个电机模块完全失效,另一个模块也能继续维持正常工作[18]。文献[19]对双余度永磁同步电机进行电流控制,实现在正常和故障情况下无电流谐波。文献[20,21]对双余度永磁容错电机故障时的最优电流控制策略进行了研究,并通过仿真和实验验证了容错控制策略的正确性。文献[22]在提出双余度永磁容错电机同轴相差4.5°机械角度结构的基础上,提出改进的最优转矩控制策略,在一相开路和短路故障时进行了仿真和实验验证。
双余度永磁容错电机通过备份的方式提高了系统的可靠性,但同时也增加了电机制造成本,降低了空间利用率,且不能保证两台电机同时达到额定负载。双绕组永磁容错电机(dual-winding FTPMM)的定子由两套相同的绕组组成,它既具有双余度FTPMM可靠性高的优点,又具有普通FTPMM空间利用率高、成本低的优点。文献[23]针对双绕组永磁容错电机提出故障容错控制策略,并通过仿真和实验进行验证,但未与原有的算法进行对比分析。文献[24]对星形联结的双绕组永磁容错电机进行了研究,利用恒转矩和恒转速控制算法,实现了短路故障的容错控制。文献[25]提出基于双绕组永磁容错电机的余度电驱动系统,通过仿真和实验验证热备份余度容错控制策略的正确性,但未提出容错控制算法,而是侧重于通过硬件电路结构实现容错控制。
本文在分析双绕组永磁容错电机基本结构及数学模型的基础上,详细讨论了加倍增加对应相电流容错控制策略、最优转矩容错控制策略和电流矢量容错控制策略的基本原理,通过数学计算和仿真比较分析了3种容错控制策略的性能和优缺点,并通过实验验证了电流矢量容错控制策略的正确性和可行性。
1 双绕组永磁容错电机结构及数学模型
1.1电机结构
永磁容错电机是开关磁阻电机和永磁同步电机相结合的产物,具有磁隔离、热隔离、电气隔离和相电抗较大等特点[21]。因此,永磁容错电机采用单层集中绕组、表贴式转子磁钢结构和深而窄的特殊槽口设计。3相8极12槽双绕组永磁容错电机结构如图1所示。图中,A与A0、B与B0、C与C0为同相的两套绕组,A、B、C三相绕组的反电动势波形互差120°,同样A0、B0、C0三相绕组的反电动势波形也互差120°。为描述方便,A、B、C绕组分别定义为第1、2、3相绕组,A0、B0、C0分别定义为第4、5、6相绕组。

图1 3相8极12槽双绕组永磁容错电机结构Fig.1 Diagram of 3-phase 8-pole 12-slot dual-winding DFTPMM
双绕组三相永磁容错电机采用如图2所示的H桥逆变电路,图中Udc为直流母线电压。电机控制过程中,两套绕组采用独立的直流电源供电。由于电机各绕组间无中性点连接,既实现了绕组之间的电气隔离[26],也提高了直流电源的电压利用率,同时为提高电机的容错控制能力提供了条件。
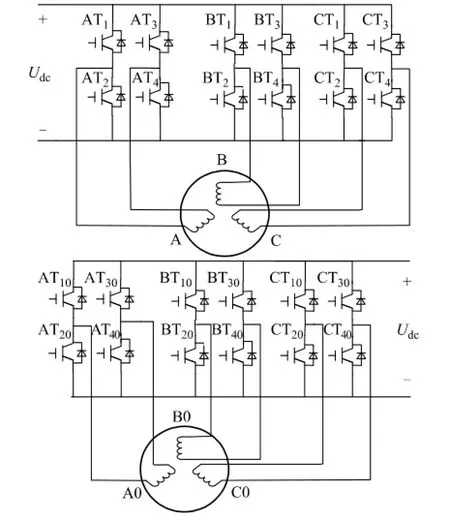
图2 双绕组三相永磁容错电机H桥逆变电路Fig.2 H-bridge inverter circuit of 3-phase DFTPMM
1.2数学模型在双绕组三相永磁容错电机中,两套定子绕组是
对称连接的,则反电动势瞬时值为

式中,ke为反电动势常数;ωm为机械角速度;θe为转子电角度。
由式(1)可知反电动势瞬时值满足下列基本关系

为获得最大输出电磁转矩,永磁容错电机各相电流应当与反电动势同步,则各相电流瞬时值为

式中,Im为电流幅值。
由于永磁容错电机的各相之间是相互独立的,在不考虑齿槽转矩脉动情况下,双绕组三相永磁容错电机的输出转矩To可表示为

将式(1)和式(3)代入式(4)可得

由铜耗定义可得双绕组三相永磁容错电机的瞬时铜耗为

式中,R为每相绕组的电阻。将式(3)代入式(6)可得

为了衡量电机运行性能和效率,定义峰峰值转矩脉动和平均相对铜耗分别为

式中,Tmax、Tmin分别为电机输出电磁转矩的最大值和最小值;PCuoi为系统在故障情况下的瞬时铜耗。
2 双绕组永磁容错电机故障分析
双绕组永磁容错电机的电气故障主要分为开路故障(包括绕组开路和开关开路)和短路故障(包括绕组短路和开关短路)。假设当逆变器的一个开关发生开路故障时,该逆变器的其他开关都关断;当逆变器发生短路故障时,对应另一桥臂的开关开通以提供电流通路,则第x相的绕组开路故障和开关开路故障统称为第x相开路故障,第x相的绕组短路故障和开关短路故障统称为第x相短路故障。
2.1开路故障
若不采用任何故障容错控制策略,当电机一相(如第1相)发生开路故障时,此项电流的瞬时值为0,则瞬时输出转矩和瞬时铜耗分别为
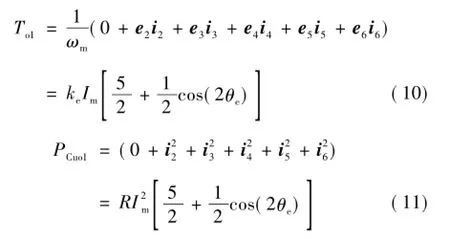
此时,峰峰值转矩脉动 Tripple=20%,平均相对铜耗PCurelative=0.83。
同理,当电机两个相同相(如第1、4相)发生开路故障时,该两相的电流瞬时值为0,则瞬时输出转矩和瞬时铜耗分别为

此时,峰峰值转矩脉动 Tripple=50%,平均相对铜耗PCurelative=0.67。
当电机两个不同相(如第5、6相)发生开路故障时,该两相的电流瞬时值为0,则瞬时输出转矩和瞬时铜耗分别为

此时,峰峰值转矩脉动 Tripple=25%,平均相对铜耗PCurelative=0.67。
当电机3个不同相发生开路故障时,故障相电流为0,则瞬时输出转矩和铜耗分别为

此时,峰峰值转矩脉动 Tripple=0,平均相对铜耗PCurelative=0.67。
2.2短路故障
绕组短路故障和开关短路故障是双绕组三相永磁容错电机中常见的故障类型。由H桥逆变电路的结构可知,短路故障无论是发生在上、下桥臂或直流电源处,对应相的绕组都会发生短路故障。当电机某一相绕组发生短路故障时的等效电路如图3a所示。
在反电动势为正弦波的情况下,产生的短路电流的最大值和平均阻碍转矩分别为

此时,输出转矩T'o=To-TSm,则转矩脉动为0。平均相对铜耗

该值的大小由电机参数确定。
当H桥逆变器中的IGBT或二极管发生短路故障时,电机绕组可通过短路的开关管以及另一桥臂的续流二极管形成回路,从而形成电机绕组短路。该故障的等效电路如图3b所示,由二极管的单向导通性可知该短路是单向的。假定逆变器中开关发生短路时,本相对应桥臂的开关接通,则可将开关短路转换为绕组故障。

图3 短路故障的等效电路Fig.3 Equivalent circuit of short-circuit fault
3 故障容错控制策略研究
永磁容错电机故障容错控制的主要作用是补偿电机故障导致的电机平均输出转矩减小,同时抑制输出转矩脉动。本节将对加倍增大对应相电流容错控制策略(容错控制策略1)、最优转矩容错控制策略(容错控制策略2)和电流矢量容错控制策略(容错控制策略3)进行分析。
3.1加倍增大对应相电流容错控制策略
在双绕组三相永磁容错电机系统中,当一相发生开路故障时,如果电机绕组具有承受两倍额定电流的能力,可将与发生开路故障的同相位的电机绕组的相电流增加1倍,以补偿开路故障导致的输出转矩损失。这一容错控制策略实质上是保证两电机模块的两对应相同相的电流之和为恒定,但该控制策略只适用于开路故障。例如,当第1相发生开路故障时,则将第4相的电流加倍,即


3.2最优转矩容错控制策略
最优转矩容错控制策略是满足零转矩脉动及最小铜耗的容错控制策略[12],即

式中,C表示输出转矩为恒值。则根据该条件,引入拉格朗日函数为

分别对式(22)中ij(j=1,2,3,4,5,6)和λ求偏导,得各相电流表达式为

当电机发生开路故障时,控制目标函数为
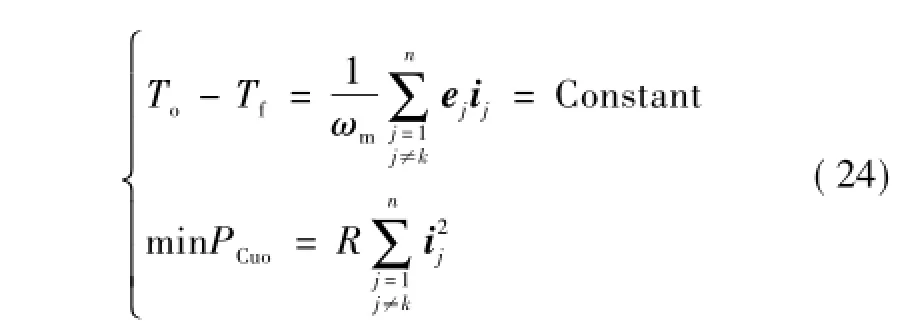
式中,Tf为故障相产生的瞬时转矩。
当第k相发生开路时,Tf=0,则求得各正常工作相的电流为


当电机同时发生两相及以上短路或开路故障时,此方法仍可正常使用。但当电机同时发生短路和开路故障时,故障后的电流计算方法虽然仍满足式(26),但需要迭代计算,较为复杂。
3.3电流矢量容错控制策略
电流矢量容错控制策略的思路是用其他无故障相的电流矢量补偿有故障相电流矢量的作用。假设电机第1相发生开路故障时,电机输出的电磁转矩为

为了补偿电机第1相开路故障导致的输出电磁转矩减小,并避免产生较大的转矩脉动,将第1相给定电流分为3份,由其余5相通过叠加合成第1相的作用,具体的电流矢量如图4所示。此时各相电流矢量的参考值为

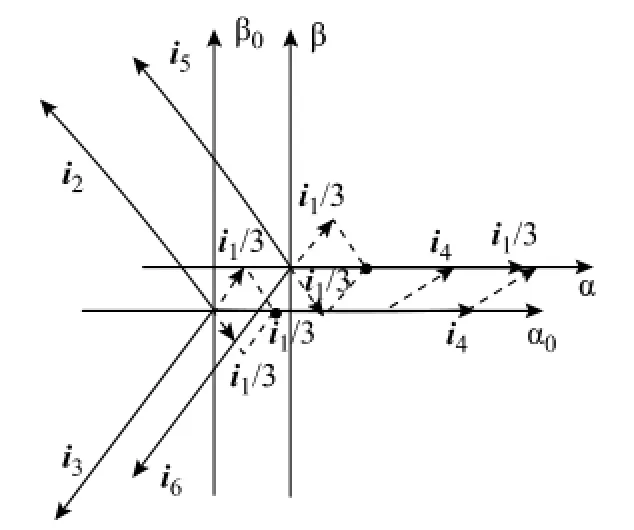
图4 第1相开路故障后的电流矢量Fig.4 Current vector diagram under phase 1 open-circuit fault condition
采用电流矢量容错控制策略后,将式(28)代入式(27)中,可得电机的输出电磁转矩为

由式(29)可知,采用电流矢量控制策略后,电机的输出电磁转矩保持不变。
当电机第1相发生短路故障时,电机输出的电磁转矩为


为维持系统输出同样的电磁转矩,电机其余5相需要先将第1相电流的作用补充上,再抵消掉第1相短路电流的作用。此时的电流矢量图如图5所示。各相电流的参考矢量值为
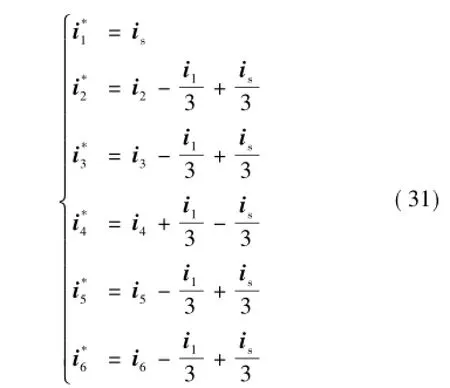
图5 第1相绕组短路故障后的电流矢量Fig.5 Current vector diagram under phase 1 short-circuit fault condition
采用电流矢量容错控制策略后,将式(31)代入式(30),此时,电机输出的电磁转矩为

由式(32)可知,短路故障时,采用电流矢量控制策略后,电机的输出电磁转矩保持不变。
由上述分析可知,电流矢量容错控制策略在系统出现开路和短路故障时具有叠加性。正常相的给定值根据具体故障做相应的变化,以保证系统可恢复对称状态。假设isx表示第x(x=1,2,3,4,5,6)相的短路电流,Kox表示第x相的开路故障信号,Ksx表示第 x相的短路故障信号。正常工作时,Kox=0、Ksx=0,当第x相发生开路故障时,Kox=1、Ksx=0,当x相发生短路故障时,Kox=1、Ksx=1,此时各相的给定值为

4 三种容错控制策略的性能比较
为了比较不同故障容错控制策略的性能,采用Matlab/Simulink对电机发生开路故障后、运用不同容错控制策略时的电机输出转矩脉动和相对铜耗进行仿真研究。为方便比较,在仿真时,不同的容错控制策略均采用电流滞环跟踪控制技术对各相电流进行控制。双绕组永磁容错电机的仿真参数如表1所示。
4.1加倍增大对应相电流容错控制策略
图6为第1相绕组在0.2 s时发生开路故障并采用加倍增大对应相电流容错控制策略后的仿真结果。由仿真波形可知,0.2 s时第4相电流增加为原来的2倍,其余各相电流均保持不变,总输出转矩同正常运行时相等,总转矩脉动系数为0。发生故障时的平均相对铜耗为正常运行时的1.33倍,与理论计算值基本相同。
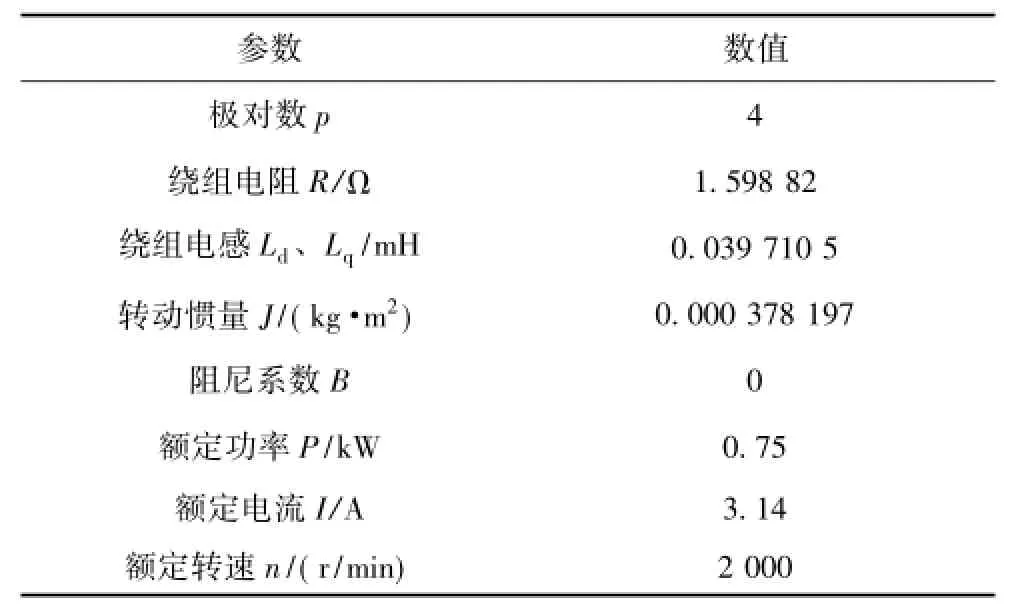
表1 双绕组永磁容错电机参数Tab.1 Parameters of DFTPMM

图6 第1相开路时采用容错控制策略1的仿真波形Fig.6 Simulation waveforms of motor under phase 1 open-circuit fault condition with the fault-tolerant strategy 1
该容错控制策略的优点在于可简单地实现零转矩脉动。这一方法也可用于两不同相发生开路故障以及一个模块整体发生开路故障的情况。其不足之处是不适用于两模块的两个对应相同时发生开路故障或短路故障的情况。
4.2最优转矩容错控制策略
图7为双绕组永磁容错电机在第1相发生开路故障并采用最优转矩故障容错控制策略时的仿真结果。由仿真结果可知,第4相电流峰值为正常运行相的1.5倍,转矩脉动为零。另外,平均相对铜耗比正常运行时增加1.22倍,与理论计算情况基本相符。


图7 第1相开路时采用容错控制策略2的仿真波形Fig.7 Simulation waveforms of motor under phase 1 open-circuit fault condition with fault-tolerant strategy 2
此故障容错控制策略不仅可用于容错电机中有两相或三相开路的故障情况,也可用于电机发生组合故障的情况。
4.3电流矢量容错控制策略
电机在0.05 s时第1相绕组发生开路故障,在无容错控制工作至0.1 s时,采用电流矢量容错控制技术对电机进行控制,仿真波形如图8所示。由图可知,电机在正常运行时相电流最大值约为1.2 A,第1相绕组发生开路故障后电流发生波动,进行电流矢量容错控制后第4相电流最大值约为1.8 A,第2、3和5、6相电流最大值约为1.6 A。由图8c可看出第1相绕组发生开路故障时的平均相对铜耗为正常运行时的1.19倍,与理论计算值基本相同。

图8 第1相开路时采用容错控制策略3的仿真波形Fig.8 Simulation waveforms of motor under phase 1 open-circuit fault condition with fault-tolerant strategy 3
由仿真波形可以看出,该容错控制策略可以实现零转矩脉动的控制,相对总铜耗最小,而且可用于任何复杂组合故障情况。
4.4三种容错控制策略性能比较
三种故障容错控制策略的比较见表2。表中分别对峰峰值转矩脉动和相对平均铜耗进行比较。

表2 三种故障容错控制策略的比较Tab.2 Comparison of three fault-tolerant control strategies
由表2可得:加倍增大对应相电流容错控制策略是实现零转矩脉动的最简单的方法,但产生的铜耗最大,且该控制策略不能用于两相同相发生开路故障的情况。最优转矩容错控制策略可实现零转矩脉动输出,铜耗比加倍增大对应相电流的控制策略小,且该容错控制策略可用于开路和短路复合故障的情况,但该方法对参考电流的计算需要在线迭代计算,较为复杂。电流矢量容错控制策略相对较简单,也可实现零转矩脉动,而且产生的铜耗最小。该容错控制策略也可用于任何故障状况,包括复杂组合故障。
5 电流矢量容错控制策略的实验验证
为进一步验证电流矢量容错控制策略的正确性,搭建了基于TMS320F28335 DSP的硬件平台,对电机第1相发生开路时的情况进行实验,图9为三相8极双绕组永磁容错电机及硬件控制平台。实验电机的参数与表1中的仿真参数一致,因此可将实验结果与仿真波形进行对比,进一步验证电流矢量容错控制策略的可行性。

图9 永磁容错电机控制系统实验平台Fig.9 Experimental Setup of FTPMM control system
实验时,采用电流滞环跟踪控制技术,通过滑动变阻器调整电机所带负载,使电流、转矩等数据便于观察和测量,电机正常运行时的波形如图10所示。由图可看出,电流最大值约为1.2 A,与图8中0.05 s发生故障前的仿真波形基本一致。由图10c可知,电机输出转矩最大值为1.82 N·m,最小值为1.55 N·m,转矩脉动约为7.46%。
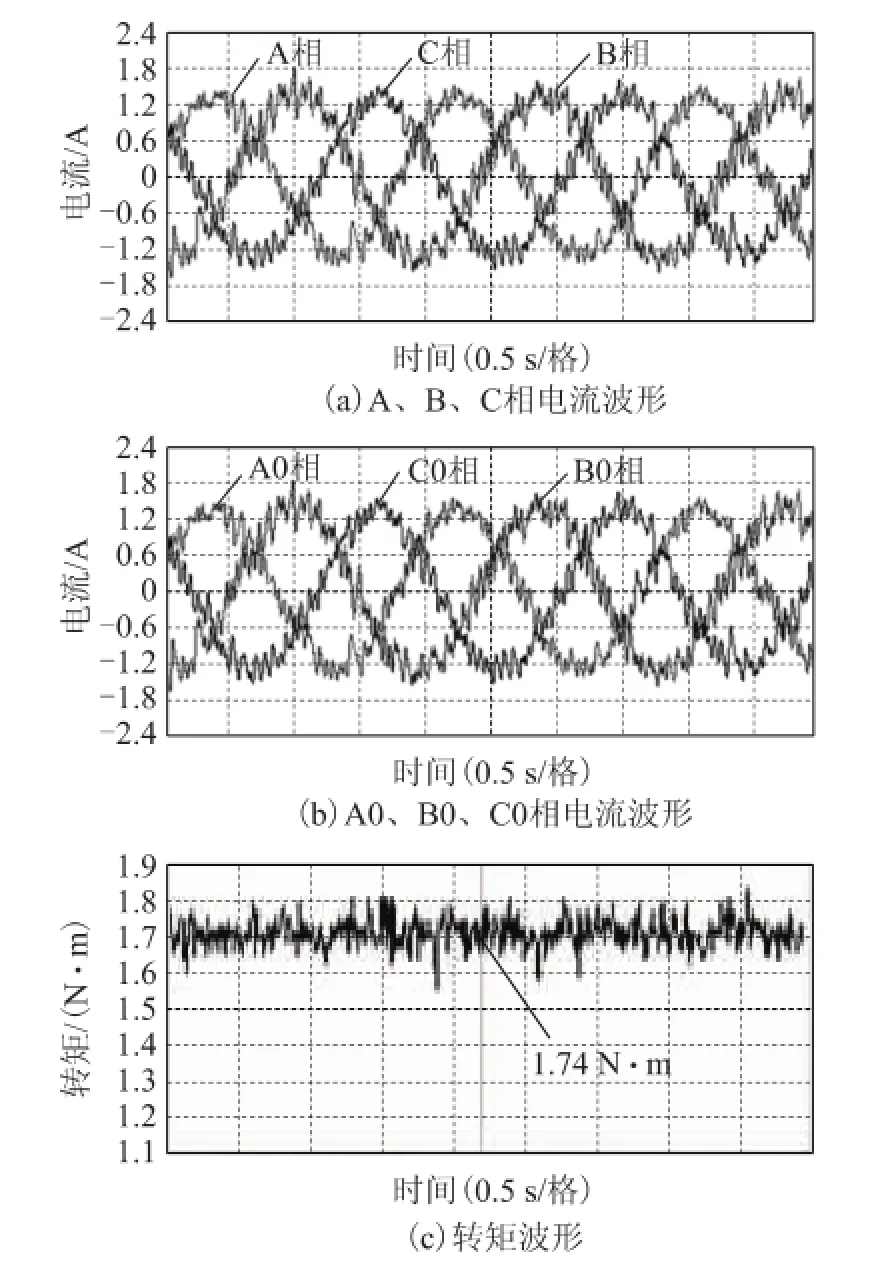
图10 无故障时的实验波形Fig.10 Experimental waveforms under healthy conditions
电机第1相绕组发生开路故障时,采用电流矢量容错控制策略,测得的电机相电流和转矩波形如图11所示。由实验结果可知,第1相绕组开路后,第2、3、5、6相绕组电流约为1.6 A,第4相绕组电流约为1.7 A,与仿真结果基本一致。由图11c可得电机最大转矩为1.81 N·m,最小转矩为1.52 N·m,转矩脉动约为8.71%,与电机正常运行时相近。

图11 第1相开路时的实验波形Fig.11 Experimental waveforms under phase 1 open-circuit fault condition
由实验测得的波形可知,电流矢量容错控制策略对电机故障时的控制效果明显,转矩脉动可控制在可接受的范围内。
6 结论
本文在分析双绕组永磁容错电机基本结构的基础上,对电机短路和开路故障进行数学分析,并从数学计算、仿真分析、实验研究等方面对加倍增加对应相电流、最优转矩和电流矢量三种容错控制策略进行对比研究。加倍增大对应相容错控制策略控制方案简单,但不能用于两相同相发生开路故障和短路故障的情况,最优转矩容错控制和电流矢量容错控制策略均可用于任何故障状况,但最优转矩容错控制策略计算过程较为复杂。三种故障容错控制策略各有利弊,但都能补偿损失的输出转矩,实现电机发生故障时的容错控制功能,并能尽量减小转矩脉动和铜耗。在实际应用中,可根据系统设计和功能的要求选择适当的故障容错控制策略。
[1]肖丽,范书瑞,刘卫朋,等.基于电流分析的四相开关磁阻电机气隙偏心故障综合检测方法[J].电工技术学报,2015,30(6):122-132.
Xiao Li,FanShurui,LiuWeipeng,etal.Fault detection method of air gap eccentricity for switched reluctance motors based on analysis of current[J]. Transactions of China Electrotechnical Society,2015,30(6):122-132.
[2]Mecrow B C,Jack A G,Haylock J A,et al.Faulttolerantpermanentmagnetmachinedrives[J].IEE Proceedings-ElectricPowerApplications,1996,143 (6):437-442.
[3]Ede J D,Atallah K,Wang J,et al.Effect of optimal torque control on rotor loss of fault-tolerant permanentmagnet brushless machines[J].IEEE Transactions on Magnetics,2002,38(5):3291-3293.
[4]Haylock J A,Mecrow B C,Jack A G,et al.Enhanced current control of high-speed PM machine drives through the use of flux controller[J].IEEE Transactions on Industry Applications,1999,35(5):1030-1038.
[5]de Kock H W,Rix A J,Kamper M J.Optimal torque controlofinteriorpermanentmagnetsynchronous machines in the full speed range[C]//18th International ConferenceonElectricalMachines, Vilamoura,Portugal,2008:1-6.
[6]Wang J B,Atallah K,Howe D.Optimal torque control of fault-tolerant permanent magnet brushless machines [J].IEEE Transactions on Magnetic,2003,39(5): 2962-2964.
[7]Bianchi N,Bolognani S,Pre M D.Strategies for the fault-tolerant current control of a five-phase permanentmagnetmotor[J].IEEETransactionsonIndustry Applications,2007,43(4):960-970.
[8]齐蓉,陈峥,林辉.永磁容错电机解耦控制研究[J].西北工业大学学报,2007,25(6):809-813.
QiRong,ChenZheng,LinHui.Amethodfor implementing torque decoupling control in fault tolerant permanent magnetmotorforaircraft[J].Journalof Northwestern Polytechnical University,2007,25(6): 809-813.
[9]任元,孙玉坤,朱纪洪.四相永磁容错电机的SVPWM控制[J].航空学报,2009,30(8):1490-1496.
Ren Yuan,Sun Yukun,Zhu Jihong.SVPWM control of four-phase fault-tolerant permanent magnet motor for aircraft[J].Acta Aeronautica Et Astronautica Sinica,2009,30(8):1490-1496.
[10]郝振洋.六相永磁容错电机及其控制系统的设计和研究[D].南京:南京航空航天大学,2010.
[11]荀倩,秦海鸿,马亚飞,等.基于最优转矩控制六相永磁容错电机故障补救策略的仿真研究[J].电源学报,2015,13(1):28-34.
Xun Qian,Qin Haihong,Ma Yafei,et al.Research of sixphasefaulttolerantpermanentmagnetmotor simulation based on optimal torque control[J].Journal of Power Supply,2015,13(1):28-34.
[12]余文涛,胡育文,郝振洋,等.永磁容错电机最优转矩控制策略实验[J].航空学报,2010,30(8): 1622-1628.
YuWentao,HuYuwen,HaoZhenyang,etal. Experimental study on optimal torque control of fault tolerant permanent magnet motor[J].Acta Aeronautica Et Astronautica Sinica,2010,30(8):1622-1628.
[13]郝振洋,胡育文,沈天珉.永磁容错电机的直接转矩控制策略[J].电工技术学报,2014,29(3): 180-188.
Hao Zhenyang,Hu Yuwen,Shen Tianmin.Director torque control strategy of fault tolerant permanent magnet motors[J].TransactionsofChinaElectrotechnical Society,2014,29(3):180-188.
[14]郑萍,雷雨,吴帆,等.电动汽车用六相永磁容错电机的分析和设计[J].电机与控制学报,2013,17 (6):29-36. Zheng Ping,Lei Yu,Wu Fan,et al.Analysis and design of a six-phase fault-tolerant PM machine used for EVs[J].Electric Machines and Control,2013,17 (6):29-36.
[15]司宾强,朱纪洪,吉敬华.四相永磁容错电机短路故障容错策略[J].控制与决策,2014,29(8): 1489-1494.
Si Binqiang,Zhu Jihong,Ji Jinghua.Two short-circuit fault tolerant strategies for four-phase permanent magnet fault-tolerant machine[J].Control and Decision,2014,29(8):1489-1494.
[16]吉敬华,刘文庆,赵文祥.一种永磁容错电机短路故障的补偿控制[J].微电机,2014,47(2): 24-28.
Ji Jinghua,Liu Wenqing,Zhao Wenxiang.Remedial shortcircuit control of permanent magnet fault-tolerant motor[J].Micromotors,2014,47(2):24-28.
[17]Ertugrul N,Soong W,Dostal G,et al.Fault tolerant motordrivesystemwithredundancyforcritical applications[C]//Power Electronics Specialists Conference, 2002,3:1457-1462.
[18]Zhu J W,Ertugrul N,Soong W L.Fault analysis and remedial strategies on a fault-tolerant motor drive with redundancy[C]//IEEE International Electric Machines& Drives Conference,Antalya,2007,2:1119-1124.
[19]Hu Yashan,Zhu Ziqiang,Liu Kan.Current control for dual three-phase permanent magnet synchronous motors accounting for current unbalance and harmonics[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics,2014,2(2):272-284.
[20] 张晓晨,朱景伟.双余度永磁容错电机开路故障补救策略研究[J].微电机,2011,44(9):5-8.
Zhang Xiaochen,Zhu Jingwei.Study on open circuit fault remedial strategy of a dual fault tolerant permanent magnet motor with redundancy[J].Micromotors,2011,44(9):5-8.
[21] 朱景伟,刁亮,任宝珠.具有冗余特性的永磁容错电机短路故障分析与控制[J].电工技术学报,2013,28(3):80-86.
Zhu Jingwei,Diao Liang,Ren Baozhu.Analysis and control of short-circuit fault in a fault-tolerant permanent magnet motor drive with redundancy[J].Transactions of China Electrotechnical Society,2013,28(3):80-86.
[22]Guo Hong,Xu Jinquan,Kuang Xiaolin.A novel fault tolerant permanent magnet synchronous motor with improved optimal torque control for aerospace application[J]. Chinese Journal of Aeronautics,2015,28(2):535-544.
[23] 李小庆,朱景伟,孙军浩,等.双绕组永磁容错电机矢量控制系统研究[J].电工技术学报,2016,31 (5):26-34.
Li Xiaoqing,Zhu Jingwei,Sun Junhao,et al.Study on the vector control system for dual winding fault-tolerant permanent magnet motors[J].TransactionsofChina Electrotechnical Society,2016,31(5):26-34.
[24] 黄义红,郝振洋,穆晓敬.基于双绕组永磁容错电机双余度控制系统研究[J].电工电能新技术,2014,33(6):36-40,74.
Huang Yihong,Hao Zhenyang,Mu Xiaojing.Dualredundancy fault tolerant permanent magnet motor control system[J].AdvancedTechnologyofElectrical Engineering and Energy,2014,33(6):36-40,74.
[25] 蒋雪峰,黄文新,郝振洋,等.双绕组永磁容错电机的余度电驱动系统[J].电工技术学报,2015,30 (6):22-29.
Jiang Xuefeng,Huang Wenxin,Hao Zhenyang,et al. Redundant control system of dual-winding fault-tolerant permanentmagnetmotor[J].TransactionsofChinaElectrotechnical Society,2015,30(6):22-29.
[26]吴一丰,邓智泉,王宇,等.六相永磁容错磁通切换电机及其单相故障的容错控制[J].电工技术学报,2013,28(3):71-79,106.
Wu Yifeng,Deng Zhiquan,Wang Yu,et al.Sixphase fault-tolerant flux switching permanent magnet motor and control strategy for single-phase fault condition [J].Transactions of China Electrotechnical Society,2013,28(3):71-79,106.
白洪芬女,1988年生,博士研究生,研究方向为永磁容错电机控制技术。
E-mail:bdunbhf@163.com
朱景伟男,1963年生,教授,博士生导师,研究方向为永磁电机控制、新能源变换技术等。
E-mail:zjwdl@dlmu.edu.cn(通信作者)
Comparative Study of Different Fault Tolerant Control Strategies for Dual-Winding Fault Tolerant Permanent Magnet Motor
Bai HongfenZhu JingweiSun JunhaoZhou BowenLi Xiaoqing
(Marine Engineering CollegeDalian Maritime UniversityDalian116026China)
On the basis of analyzing the principle structure of the dual-winding three-phase fault tolerant motor,this paper discusses the torque ripples and copper loss under motor open-circuit and short-circuit conditions.Then the doubling current fault-tolerant strategy,the optimal torque control,and the current vector fault-tolerant control are discussed in detail.The characteristics of these fault-tolerant control strategies are discussed and analyzed by calculation and simulation.Finally,the correctness of the proposed current vector fault-tolerant control is verified by the hardware experiment setup under healthy and open-circuit conditions.
Dual-winding fault tolerant permanent magnet motor(DFTPMM),open-circuit fault,shortcircuit fault,fault tolerant control strategies
TM351
国家自然科学基金(51077007)、广西中青年教师基础能力提升项目(KY2016LX419)和辽宁省科学技术计划(2011224004)资助项目。
2015-04-08改稿日期 2015-08-07
猜你喜欢
电工技术学报(2022年20期)2022-10-29
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
上海大中型电机(2021年2期)2021-07-21
建材发展导向(2021年7期)2021-07-16
防爆电机(2020年6期)2020-12-14
青年歌声(2019年2期)2019-02-21
知识经济·中国直销(2017年11期)2017-11-28
中国公路(2017年16期)2017-10-14
客车技术与研究(2015年3期)2015-08-24