三坐标测量机结构变形引起的动态误差
2016-08-15 01:26苏长青
沈阳航空航天大学学报 2016年2期
关键词:惯性力
李 静,梁 宇,苏长青
(沈阳航空航天大学 航空制造工艺数字化国防重点学科实验室,辽宁 沈阳 110136)
三坐标测量机结构变形引起的动态误差
李静,梁宇,苏长青
(沈阳航空航天大学 航空制造工艺数字化国防重点学科实验室,辽宁 沈阳 110136)
摘要:在高精密三坐标测量机测量的过程中,对动态误差分析的研究一直是提高测量机精度和速度一项重要课题。对三坐标测量机结构在运动中所产生的动态变形进行理论分析。由于伺服电机产生的驱动力和移动部件惯性力的作用会导致整体桥架、滑架、立柱和Z轴等部件发生偏转。通过相应的理论计算,指出各部件绕气浮导轨的偏转和机体主要结构的弯曲变形是产生动态误差主要原因之一。利用动态误差实验,对三坐标测量机机体变形引起的动态误差进行测量,验证机体变形和测头位置对精度的影响,为误差修正和机构优化设计提供依据。
关键词:三坐标测量机;惯性力;机体变形;动态误差;测头位置
从20世纪50年代世界第一台坐标测量机的产生到现在各种各样的三坐标测量机的在工业中广泛使用,坐标测量设备显然已成为现代制造业无法替代的一个重要构成部分[1-2]。在过去60多年中,制造业使用的坐标测量机经过了多个质的飞跃。随着工业的不断发展,人们对三坐标测量机要求越来越高,高精度和高速度测量机越来越受欢迎,制造商纷纷推出了在保证精度的情况下高速测量机,其中,应用最为广泛的测量机为移动桥式三坐标测量机。测量机测量速度越快,其精度就越难保证,如何在保证精度的情况下,提高速度是一项重要的研究课题。
现在气浮导轨被广泛应用到测量机设计中。在高速测量的过程中,测量机各个零件的加速度会导致力的作用。由于气浮导轨和机构本身的刚度不够,导致测量机各移动部件和气浮导轨结构本身发生弯曲和偏转,各移动部件连接的气浮导轨间隙的大小发生变化,导致光栅读数与测量线不重合,实际测量的数值与光栅读数不同,由此产生了动态误差[3-4]。一般来说,加速度越大,惯性力越大,各个移动部件相互作用力越大,发生的偏转和本身弯曲变形误差越大。本文主要研究机体动变形(包括动态线变形和动态角度变形)的产生机理,对气浮轴承进行理论分析,并考虑实际因素对轴承特性的影响。建立机体结构动变形与位移误差转换模型,验证空间位置的不同,机体动变形带来的测头处的位移误差也会不同,对提高工作效率和结构优化有着重要意义。
1 动态变形分析
本文主要研究在工厂中应用最广泛的桥式测量机,如图1所示。测量机底面为固定的工作台,移动滑架可以在桥架上沿着Y轴移动,测头系统和Z轴固定在滑架上,沿着Z方向可以上下移动,整个桥架可以沿着X方向移动,完成X、Y、Z方向的测量,相互移动的部件用气垫相互支撑,工作台和横梁一般为花岗岩材料,其他材料为铝合金材料[5-8]。桥式坐标测量机的特点为整体框架是桥梁形状,因此Y刚性增强,大大减少变形量,提高整体精度。X、Y、Z三个方向的行程都可以增大,有一定的承载能力而且本身具有移动工作台,适用于大型测量机,受地面环境影响较小,开敞性好。在三坐标测量机快速测量的过程中,由于惯性力的作用,当测头接触测量点的时候仍处于加速状态。当测头沿X、Y、Z三个方向加速移动时,驱动力和惯性力施加在整个测量机的机械结构上,导致其立柱、滑架等移动部件发生变形。各部件通过气垫支撑连接,气浮导轨间的间隙距离发生变化会导致测头位置发生偏离。当测头沿X方向上移时,由于测量线与光栅不重合,存在较大的阿贝误差,造成测量的标准值与实际光栅读数不同,也会产生较大的动态误差[9-10]。图2为三坐标测量机各个运动部件沿X、Y、Z三个方向在驱动力和惯性力作用下所引起的测头偏移误差。
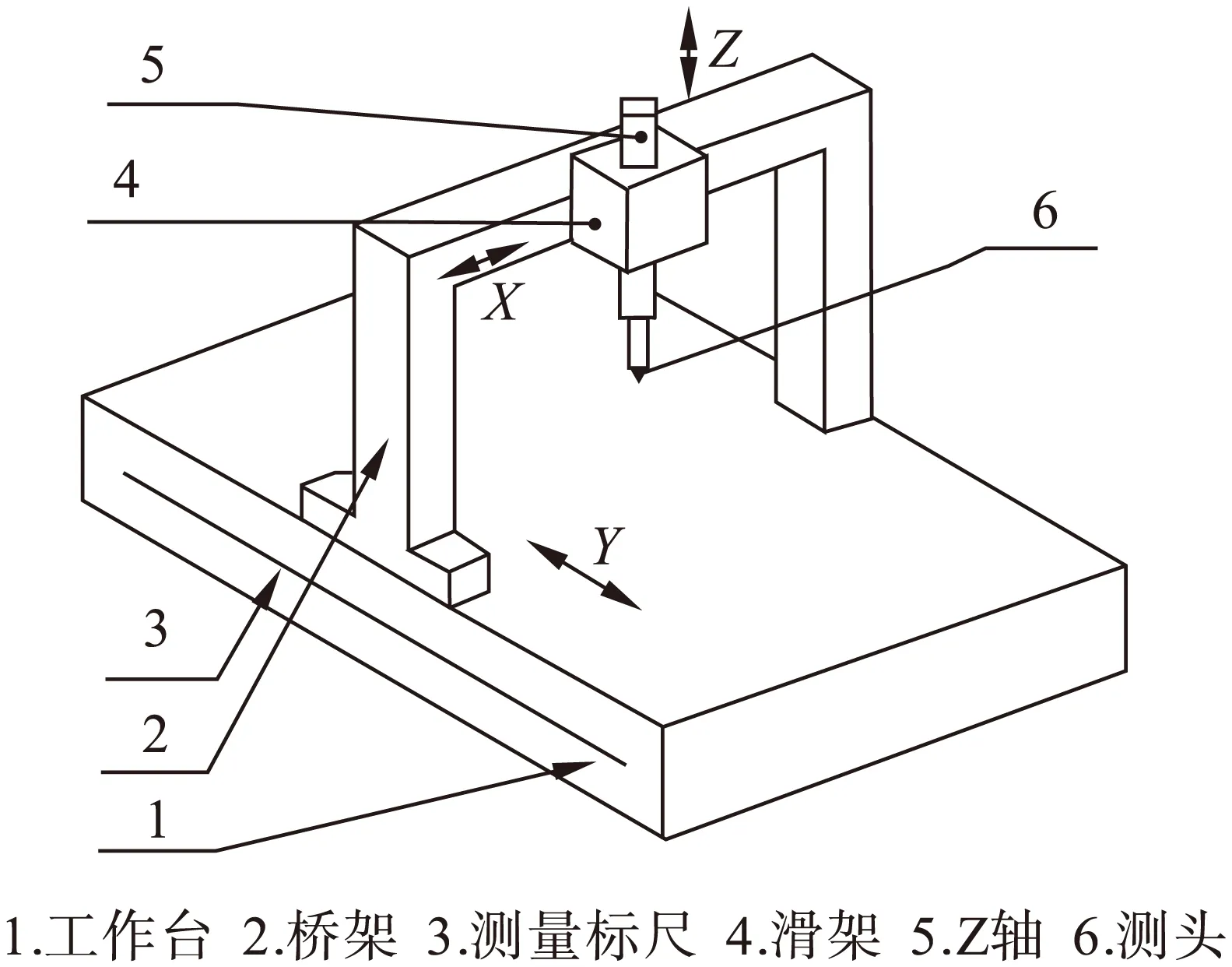
图1 三坐标测量机示意图
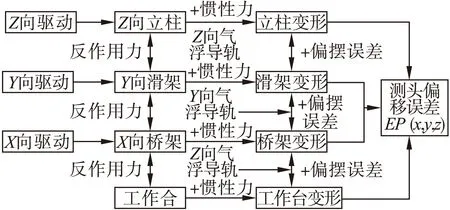
图2 机体动态变形产生机理图
由于移动桥式测量机是单边驱动测量机,其动态偏转误差相对于位移误差的影响较大,所以主要研究各气浮导轨在运动中产生的偏转所造成的误差。当Z轴与滑架沿着Y方向移动时,由于运动部件质量较小,Z轴上产生的惯性力对测量的准确度影响较小,所造成的动态误差相对很小。当Z轴沿着Z方向运动时候,阿贝臂较小,有很小的动态误差。本文接下来主要探讨的是沿着X方向运动时所产生的动态偏转误差。
2 测量机的动态偏转误差
当测量机沿着X方向高速运动时,驱动力和惯性力会导致整体桥架、滑架、立柱、Z轴绕Y方向和Z方向发生偏转,由于移动桥本身结构的刚度有限,也会发生变形弯曲导致偏转误差[11-13]。将运动的桥架作为一个整体研究,沿X方向运动时,各个运动部件偏转误差如表1所示:
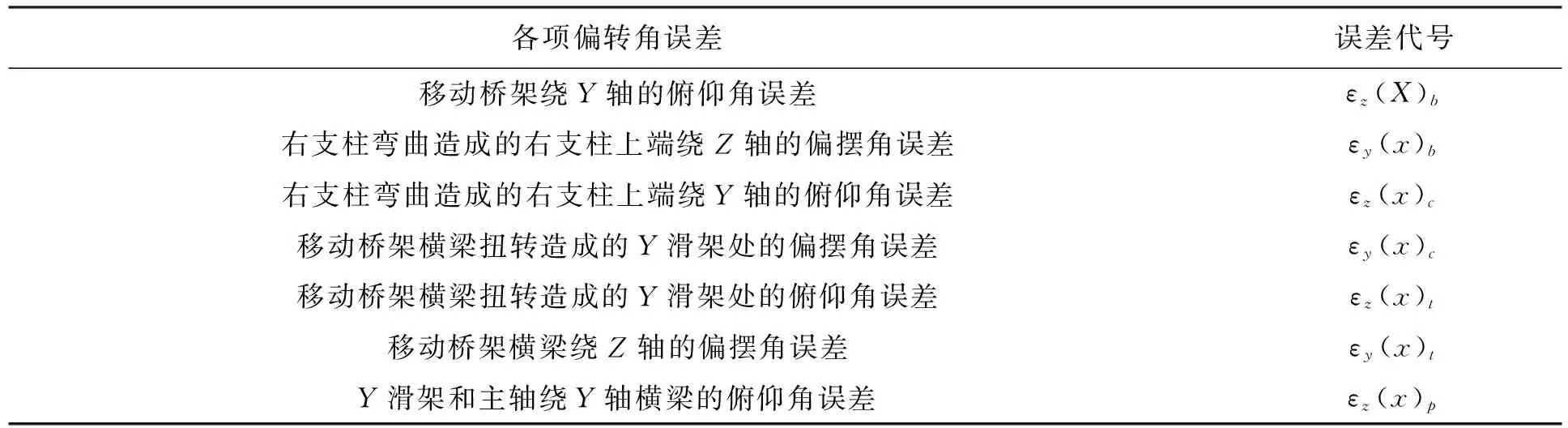
表1 测量机X方向测量所产生的误差
当整体滑架沿X方向运动时所产生的绕Z轴和Y轴的偏转误差分布图如图3、图4所示。
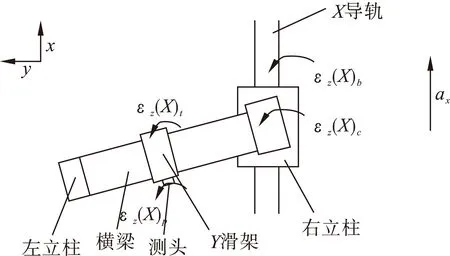
图3 绕Z轴方向的偏转误差
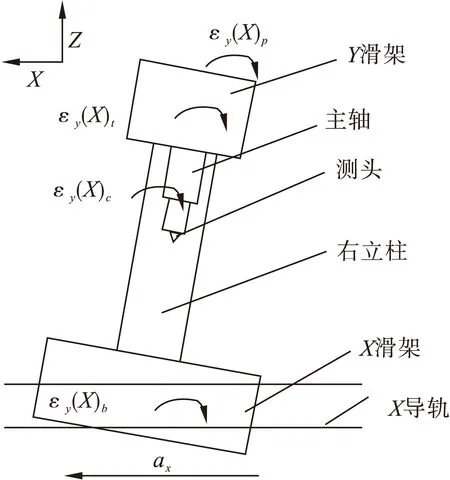
图4 绕Y轴方向的偏转误差
3 偏差误差与位移误差之间计算关系
图5为整体框架在X方向移动的俯视图,其整个框架支撑着中滑架和Z轴的重量,在X方向位移过程中会产生较大偏转和惯性力,容易产生误差。

图5 滑架沿X方向位移俯视图
首先把整个移动桥架作为一个整体去考虑,根据图5所示,把模型简化成一个悬臂梁结构,沿X方向运动的时候,在惯性力的作用下,移动桥架绕着Z轴方向发生偏转和弯曲,如图6所示。
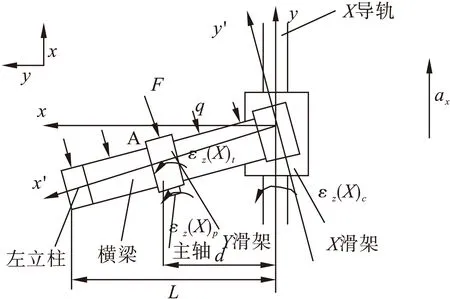
图6 横梁的悬臂梁结构模型
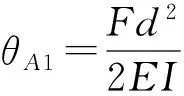
(1)
(2)

(3)
带入式(2)中可以得出在Y滑架上A点测头总的偏移误差为
(4)
令K(k/l)=

(5)
如果计算包括移动滑架相对于气浮导轨的偏移和整体滑架本身的惯性力的作用下产生弯曲变形的时候,通过坐标旋转的公式可得
(6)
由于εz(x)a很小,式(6)可简化为
(7)
以上讨论了导致测头在测量过程中产生动态误差的几个主要因素,包括在X轴方向运动时,横梁变形所引起的Y滑架绕Z轴的偏角θA,气浮导轨系统引起的X导轨绕Z轴方向的偏角εz(x)b和移动桥架右支柱的扭转引起的右支柱上端绕Z轴的偏角εz(x)c。
因为移动的桥架支柱和Z轴的抗变形能力较强,移动桥架和主轴绕Y轴的偏转εy(x)b和εy(x)p对测头的位移误差的影响可以通过εy(x)b和εy(x)p相应的阿贝臂长来确定。假设三坐标测量机的运动桥架右支柱的高度为h1,Z轴伸出的长度为h2,其位移误差
εx(X)z=εy(X)b(h1-h2)-εy(X)c-εy(X)t-εy(X)p)h2
(8)
那么测头总位移误差
δx(x)=δx(x)1+δx(x)2=

(9)
由以上公式可知,在运动件移动的过程中,在驱动力和惯性力共同作用下,结构会产生较大的动态变形,主要表现为各个运动部件在移动中绕X、Y、Z轴三个方向发生偏角误差,这些动态变形误差会和机体线性动态误差一起通过三轴的偏转传递到测头,产生位移误差。由式(9)可知,这些机体动态变形误差不仅与测量速度和加速度有直接关系,而且还随测头相对位置改变而变化,即与测头的相对位置有关。以上讨论了机体动态变形对测头动态误差的影响,为以后的误差修正和机构优化设计提供相应理论依据。
4 测量机结构变形引起的动态误差实验
本实验由北京航空精密研究所完成实验,通过测量机在工作过程中对其误差的实验来验证上面的理论计算是否准确。实验所用测量机型号为century977,X、Y、Z三个方向的行程为900 mm、700 mm、700 mm的桥式移动测量机,三轴为天然花岗岩材料,具有高分辨率的光栅检测系统。实验使用HP5529A型双频激光干涉仪,测量精度可以达到0.05μm,可以高精度测量角度、直线度、垂直度等实验数据,满足实验要求,实验原理图如7所示。

图7 实验原理图
在误差测量前,把测量机X、Y、Z轴的位置归零,Y向和Z向轴坐标保持不动,将整个中滑架放在横梁的中心位置,整体桥架仅向X轴方向移动。设置移动速度为40 mm/s,用HP5529A双频激光干涉仪测量的位移量与X轴运动光栅检测的位移量实时比对,以光栅测量值为基准,每隔20 mm记录误差值,重复测量2~3次,取平均值记录,以确定X轴向运动时X方向的角度偏差和位移偏差。X轴偏摆角误差可以通过干涉仪与角度反射镜测量。通过实验数据对第2节理论计算内容进行验证。
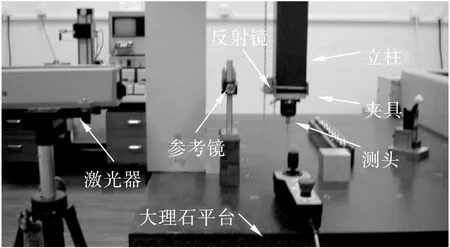
图8 实验装置图
X轴位移误差与偏角误差曲线如图9、10所示。可以通过图9、10其中一个点的位置验证第3节推导的理论公式的可行性。
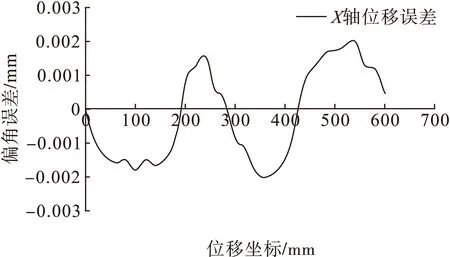
图9 X轴位移误差曲线
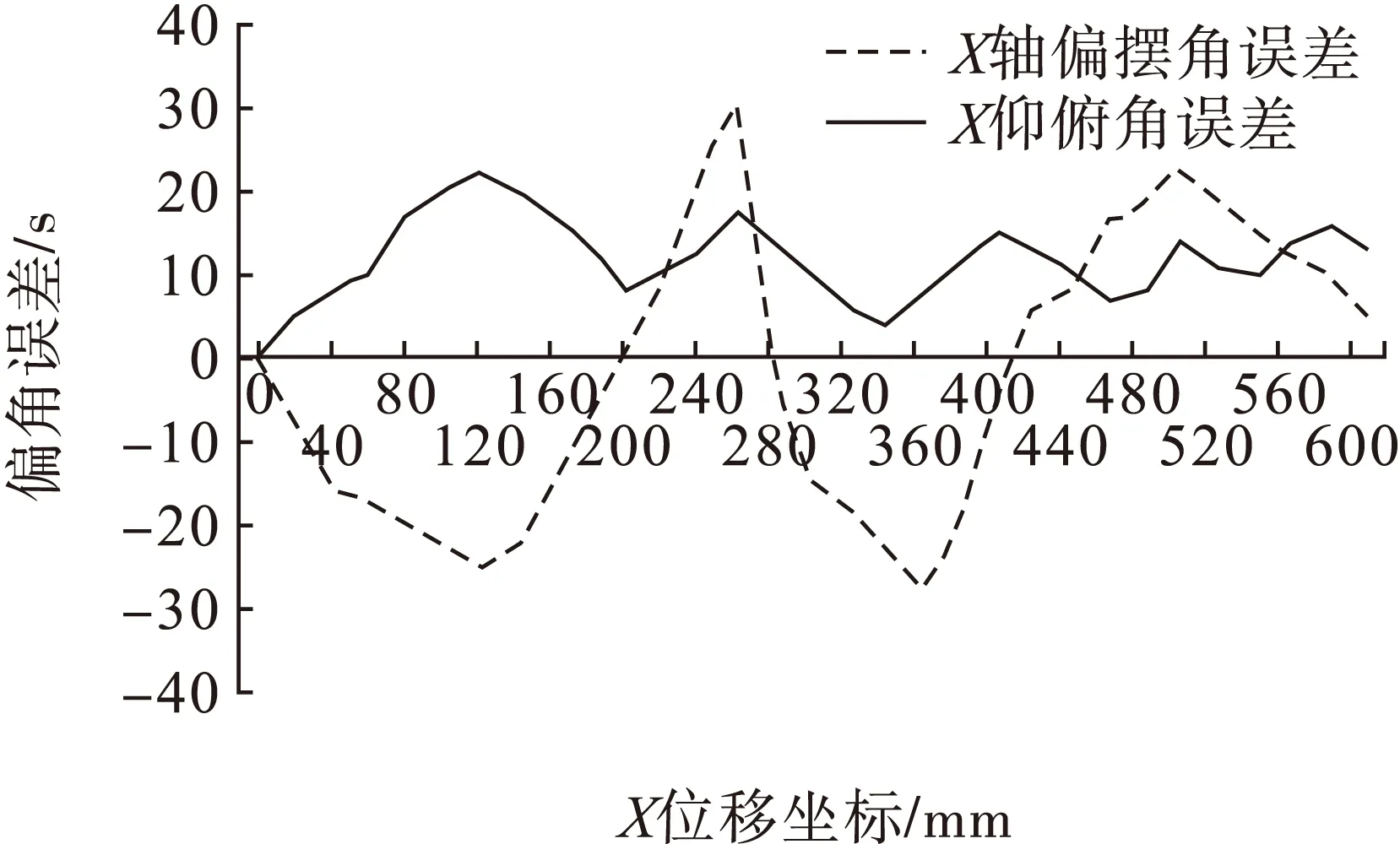
图10 X轴角偏角误差曲线
可以求出K(d/l)=
303.09mm。

实验时所用的century测量机立柱长度h1=1 130 mm,Z轴的伸长量h2=700 mm。根据实验数据可以知道当X移动到220 mm时,其总的俯仰角εy(X)=0.001 1°,εy(X)b=0.000 19°,代入公式(8)中,可以得到
δx(X)2=εy(X)b(h1-h2)-(εy(X)c+εy(X)t+εy(X)p)h2=0.000 113 mm。
其总位移误差为δx(X)=δx(X)1+δx(X)2=0.001 12 mm+0.000 113 mm=0.001 233 mm。
通过理论计算可以得知其总位移误差为0.001 233 mm,而实验所测的数据为0.001 278 mm 。通过两个数据对比可以得知计算的理论值与实际测量值相差不大,误差随着测头位置不断变化,由于各种不可控因素的影响(环境因素等)导致实验值的误差比理论计算的误差大。
理论计算与实际误差值相差0.000 045 mm,理论计算比较精确。通过上面的实验,可以验证理论推导的正确性,为测量机在X方向的位移误差估算提供了一种新的手段。
5 结论
本文通过上述研究与实验可知,三坐标测量机的误差主要是由各个部件绕气浮导轨的偏转和各个移动部件发生弯曲变形所造成的。通过桥式移动测量机在X方向移动的动态变形误差,找出偏转角误差与位移误差之间的关系,在理论计算中指出这些机体动态变形误差不仅与测量速度和加速度有直接关系,而且还与测头的位置直接相关。通过实验获得测量过程的误差数据,验证了之前的理论计算的准确性,为误差补偿和修正提供理论基础。
参考文献(References):
[1]白月飞,高青松,金伟.浅谈三坐标测量机及其应用[J].现代制造技术与装备,2009(6):29-31.
[2]康蓉娣,颜飞雪.三坐标测量机及其精密检测应用[J].舰船防化,2008(6):53-56.
[3]薛贵侠.三坐标测量机的机械系统结构研究与设计[D].哈尔滨:哈尔滨工业大学,2006.
[4]杨洪涛, 费业泰.三坐标测量机动态误差及其空间相关性研究[A].第五届全国信息获取与处理学术会议[C].2008.
[5]刘祚时,倪潇娟.三坐标测量机(CMM)的现状和发展趋势[J].机械制造,2004(8):32-34.
[6]刘鹏,康秋红.三坐标测量机误差补偿技术综述[J].重庆工商大学学报(自然科学版),2008(6):243-246.
[7]林述温,吴昭同,李刚.三坐标测量机非刚体性效应测量误差分布特征[J].仪器仪表学报,2001,22(2):172-175.
[8]朱成华.三坐标测量机动态误差与测球半径补偿误差的研究[J].机床与液压,2009(4):120-122.
[9]王欣.三坐标测量机动态误差分析[D].西安:西安理工大学,2007.
[10]王亚平,王鹏.三坐标测量软件系统坐标系的建立[J].工具技术,2004, 38(10) :63-65.
[11]杨洪涛.坐标测量机误差建模与修正技术研究[D].合肥:合肥工业大学,2007.
[12]胡建兵,周云飞,朱红光,等.基于单边驱动的精密气浮工作台之振动分析与抑制[J].机床与液压,2004(6):19-21.
[13]中村哲夫.三坐标测量机测量误差的评价方法[J].国外计量,1994(2): 8-13.
[14]马修水.三坐标测量机动态误差源分析、建模与修正技术研究.合肥:合肥工业大学,2005.
[15]浦昭邦,王宝光.测控仪器设计[M].北京:机械工业出版社,2001.
(责任编辑:吴萍英文审校:隋华)
收稿日期:2015-06-26
作者简介:李静(1985-),女,辽宁朝阳人,助理工程师,主要研究方向:数字化制造,E-mail:20133362@sau.edu.cn。
文章编号:2095-1248(2016)02-0046-06
中图分类号:TH711
文献标志码:A
doi:10.3969/j.issn.2095-1248.2016.02.009
The dynamic error caused by structure deformation of the three-coordinate measuring machine
LI Jing, LIANG Yu,SU Chang-qing3
(Key Laboratory Fundamental Science for National Deference of Aeronautical Digital Manufacturing Process,Shenyang Aerospace University,Shenyang 110136,China)
Abstract:In the measurement of high precision three-coordinate measuring machine,dynamic error analysis has always beenan important subject inimprovingprecision and speed.Dynamic deformation of three-coordinate measuring machine structure in movement are analyzed theoretically.Under the effect of the servo motor driving force and moving components inertia force,the overall bridge,carriage,upright post,Z shaft and other components deflect.Through corresponding calculation,it is pointed out that deflection of each component around the air bearing guide and the bending deformation of the main structure are the main causes of dynamic error.By conducting experiments,the dynamic errors of CMM body deformation weremeasured to verify the impact of body deformation and probe position on accuracy,thus providing a basis for error correction andoptimum structural design.
Key words:three-coordinate measuring machine;inertial force;body deformation;dynamic error;probe position
猜你喜欢
数理化解题研究(2022年22期)2022-08-30
锻压装备与制造技术(2021年2期)2021-07-19
中学物理·高中(2019年8期)2019-09-20
大众科学·中旬(2019年6期)2019-09-10
科教导刊(2018年25期)2018-11-05
科技创新与应用(2018年27期)2018-09-29
中原工学院学报(2015年3期)2016-01-20
现代机械(2015年4期)2016-01-16
物理通报(2012年6期)2012-01-23
物理与工程(2010年5期)2010-03-25