蛇形机械手臂模型的运动分析
2016-08-16 03:47吉林长春理工大学机电工程学院盛龙杨柳
河北农机 2016年1期
吉林长春理工大学机电工程学院 盛龙 杨柳
蛇形机械手臂模型的运动分析
吉林长春理工大学机电工程学院盛龙杨柳
蛇形手臂机器人具有稳定性好、横截面小、柔性等特点,结构上连续,能在各种粗糙、陡峭、崎岖的复杂地形上行走,并可攀爬障碍物,这是以轮子或腿作为行走机构的机器人难以做到的。因此,它能有效、迅速、可靠地应用于许多工作。本文提出一种独特的双驱动加上缆绳张力不变的设计方法,该设计有很大的弯曲灵活性,推出了实现此设计的运动模型。
蛇臂;运动状态;缆绳
1引言
由于自然灾害如地震、恐怖活动等原因,在世界各地,灾难经常发生。在灾难救援中,救援人员只有非常短的时间在倒塌的楼房废墟中寻找幸存者。在这种危险环境下,机器人技术可以为救援人员提供帮助,而且机器人的灵活性受到考验,设计成蛇形手臂的机器人由于其具有多关节、多自由度、多冗余自由度等特点,可以形成多种运动模式,非常适用于在复杂环境中,如可在有辐射、有粉尘、有毒及倒塌建筑物环境下进行搜救、侦查、排除爆炸物等抢险救灾任务,因此实用性很强。
2运动模型

图1 (a)蛇形手臂的全视图 (b)手臂的一部分
蛇形手臂包括圆盘、驱动缆绳、关节、刚性杆。圆盘通过兼容性关节和缆绳相连接,依靠驱动缆绳产生的扭矩,手臂进而弯曲。该设计能使手臂获得一个比较均匀的弯曲状态。
3运动模型分析
3.1运动分析正解
运动分析正解的目的就是确定蛇臂顶端的位置,整个蛇臂的运动取决于一段的运动,取蛇臂的一段进行分析,如图2,O1和O2是两个关节的枢轴点,分别在两个点建立坐标系

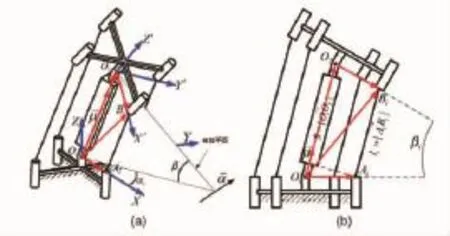
图2 蛇臂一部分的运动模型:(a)全视图;(b)弯曲截面图


由此我们可以对蛇臂的一部分进行定位。
3.2运动分析反解
反解运动分析的目的就是为了达到需要的蛇臂状态的缆绳长度。反解分析分为两步:首先通过给定的方位角和弯曲角,获得上端的固定点Bi,然后每束缆绳的长度可以通过向量的大小得到。
参考图2,由向量方程每束缆绳可以表示如下:



图3 蛇臂的形态




这种情况是考虑蛇臂在弯曲的时候没有额外的伸长得到的。
[1]孙洪,刘立祥,马培孙.攀爬蛇形机器人爬树的静态机理研究[J].机器人,2008,30(2):112-116.
[2]熊翔,颜国正,于国清.基于蛇类生物的仿生变体机器人运动学研究[J].光学精密工程,2001,9(4):330-333.
[3]赵铁石,李娜.蛇形机器人运动学建模的虚设机构法[J].机械工程学报,2007,43(8):66-71.
[4]陈丽,王越超,李斌.蛇形机器人研究现况与进展[J].机器人,2002,6(24):559-563.
[5]崔显世,颜国正,陈谟.一种微小型仿蛇机器人样机的研究[J].机器人,1999,21(2):156-160.
[6]孙洪.攀爬蛇形机器人[J].上海:上海交通大学,2007.
[7]叶长龙,马书跟.蛇形机器人的转弯和侧移运动研究[J].机械工程学报,2004,40(10):119-123.
[8]郁树梅,王明辉.水陆两栖蛇形机器人的研制及其陆地和水下步态[J].机械工程学报,2012(5):18-25.
猜你喜欢
军事文摘(2021年18期)2021-12-02
航空学报(2021年9期)2021-10-20
今日农业(2020年14期)2020-12-14
船舶标准化工程师(2020年5期)2020-10-17
上海海事大学学报(2019年4期)2019-12-30
中国特种设备安全(2018年10期)2018-12-18
中国港湾建设(2017年11期)2017-12-19
金色年华(2017年13期)2017-04-04
少儿科学周刊·少年版(2015年4期)2015-07-07
科学启蒙(2011年9期)2011-09-22