
侧向自动着舰引导控制L1自适应设计
2016-08-30 06:49高丽吴文海梅丹曲志刚
飞行力学 2016年4期
高丽, 吴文海, 梅丹, 曲志刚
(海军航空工程学院 青岛分院, 山东 青岛 266041)
侧向自动着舰引导控制L1自适应设计
高丽, 吴文海, 梅丹, 曲志刚
(海军航空工程学院 青岛分院, 山东 青岛 266041)
针对具有不确定性及外部干扰的着舰轨迹精确跟踪控制问题,提出了一种对侧向自动着舰引导控制内外回路进行综合化设计的方法。使用特征结构配置实现侧向模态解耦跟踪控制,同时设计L1自适应控制器以补偿系统由于不确定性、舵面故障、舰尾流干扰带来的不利影响,将其应用到侧向自动着舰控制系统。仿真结果表明,对内外回路进行综合设计的着舰引导控制律具有抑制不确定性及干扰的能力,能够实现对侧向自动着舰轨迹的精确跟踪控制。
L1自适应控制; 自动着舰; 特征结构配置
0 引言
舰载机着舰会受到建模误差、舰尾流扰动等不确定性的影响,自动着舰控制系统使得舰载机按照理想的下滑轨迹着舰,提高了着舰的安全性、准确性及自动化程度,其核心是着舰引导控制律的设计。早期的研究工作主要集中于舰载机自动着舰系统中的经典以及鲁棒线性控制方法上[1-5],多数针对线性状态空间模型对各个回路进行单独设计,限制了着舰精度的提高。为进一步提高着舰精度,可考虑对内外回路进行综合化设计的方法。应用H∞控制[6]可实现着舰飞行控制与引导控制的综合化设计,提高系统的鲁棒性,但是控制器阶次太高,在工程实际应用中必须进行降阶处理。近几年,非线性控制方法[7-8]在飞行控制上的应用已经比较成熟,但是由于着舰控制问题非常复杂,因此还需要深入研究如何保证着舰的安全性。
本文以F/A-18A舰载机为研究对象,针对具有不确定性和舰尾流干扰的多输入、多输出侧向着舰轨迹精确跟踪控制问题,考虑采用特征结构配置算法实现模态解耦,并且采用L1自适应控制方法综合设计以补偿内外回路的不确定性。
1 特征结构配置在自动着舰控制中
的应用
考虑舰载机侧向线性化运动模型:
(1)
其中:
x=[β,p,r,φ]T
u=[δa,δr]T
将状态向量扩展为x=[β,p,r,φ,ψ,y]T,其系数矩阵也相应扩展,仍用Alat,Blat,Clat表示。另外,定义如下偏航角、航迹偏航角及侧向位移运动学变量[9]:
(2)
(3)
(4)
采用特征结构配置算法实现模态解耦以及侧滑角和侧向偏离的精确跟踪控制。为了消除阶跃指令跟踪误差,在控制系统中引入误差积分[10],其控制方框图如图1所示。

图1 积分特征结构配置Fig.1 Eigenstructure assignment controller with integrator
输入指令信号rcmd=[βc,yc]T,那么跟踪误差积分信号e=∫[βc-β,yc-y]Tdt。使用状态x与误差信号e扩展系统状态,可得扩展闭环系统为:
(5)
考虑状态反馈,控制信号可表示为:
u=-k1x-k2e
即:
从而扩展系统可表示为:
(6)
根据一级飞行品质要求,以及为了实现侧滑与滚转角的解耦和侧向偏移控制,可选取如表1所示的扩展系统期望特征值和如表2所示的期望特征向量。
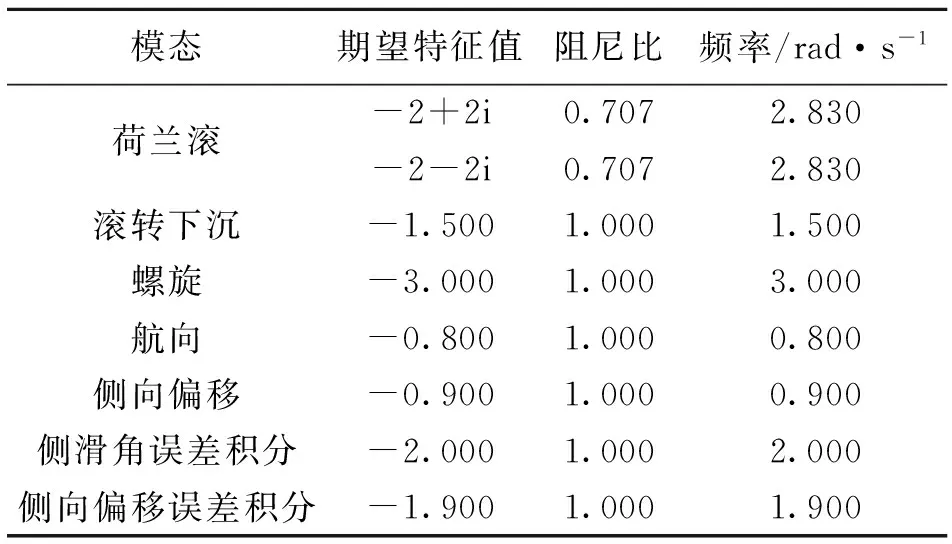
表1 侧向闭环系统期望特征值Table1 Desiredeigenvaluesforlateralclosedloop
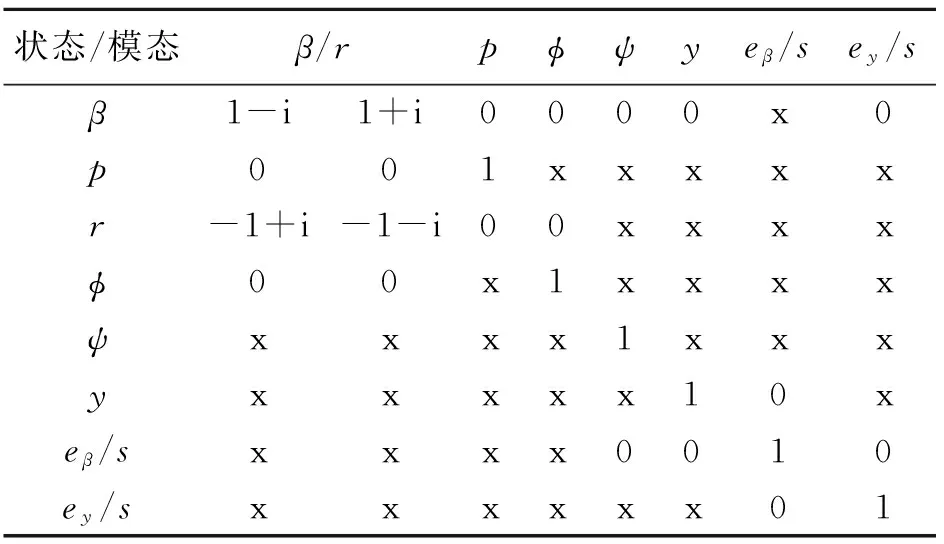
表2 侧向闭环系统期望特征向量Table2 Desiredeigenvectorsforlateralclosedloop
考虑如下侧向小扰动线性化标称模型,其系数矩阵分别为:


2 L1自适应侧向内外回路综合设计
本文采用特征结构配置和L1自适应方法对飞行控制内回路和侧向着舰引导外回路控制律进行综合设计。采用特征结构配置算法实现标称状态下侧滑角和侧向位移的解耦控制,而采用自适应方法用于处理不确定性以及舰尾流的干扰,减小着舰误差。侧向纠偏原理如图2所示。

图2 自动着舰侧向纠偏原理图Fig.2 Rectify a deviation principle diagram for lateral automatic carrier landing
2.1问题描述
考虑扩展系统式(6),并将副翼及方向舵作动器状态加入,那么增广系统状态包括:

(7)
式(7)进一步可以改写为:
(8)

式中:Δf1(t,x)为不确定性中的匹配部分;Δf2(t,x)为不确定性中的非匹配部分。
为了方便进一步分析,系统满足如下假设[12]:
(9)
假设2:偏导数的半全局一致有界性。f(t,x)在论域内是连续的,而且对于i=1,2和∀δ>0,存在dfxi(δ)>0和dfti(δ)>0,使得对任意‖x‖∞≤δ<∞,f(t,x)关于x和t的偏导数是分段连续且有界的:
(10)
假设3:不确定系统输入增益的符号知识。系统输入增益为未知对角矩阵,假设λii符号已知,令λii>0,且标称模型中λ0已知。
假设4:匹配传输零点的稳定性。传递函数矩阵Hm(s)=C(s)(sIn-Am)-1Bm的传输零点均位于左半平面。

2.2L1自适应控制器设计
下面推导L1控制器的动态结构。考虑如下状态预测器:
(11)
自适应参数估计由以下自适应律[13]生成:
(12)
式中:t∈[iTs,(i+1)Ts];i=0,1,2,3,…。
(13)
(14)
(15)
自适应控制律可由如下反馈回路生成:
(16)
(17)
(18)
其中:
rg(s)=Kgrcmd(s)
解式(16),可得:
(19)
其中:
C(s)=λ0kD(s)[I+λ0kD(s)]-1
闭环系统的结构如图3所示。

图3 L1自适应控制结构Fig.3 L1adaptive control structure
为了保证整个系统的稳定性和期望瞬态性能,选择D(s)和k保证对于给定的‖x0‖∞≤ρ0<∞存在ρr>ρin,满足如下L1范数条件[12]:
(20)
其中:
Gm(s)=Hxm(s)[In-C(s)]
Hxm(s)=(sIn-Am)-1Bm
Hxum(s)=(sIn-Am)-1Bum
l0L2ρr/L1ρr,B0max(B10,B20/l0)
3 仿真结果及分析
为了验证内外回路综合设计的着舰引导控制律的有效性和实用性,以F/A-18A侧向自动着舰为例,分别对采用特征结构配置的标称控制器及L1自适应补偿的控制律进行仿真分析研究。
L1自适应控制器参数设计如下:
且满足式 (20)。
系统中引入如下不确定性:(1)系统模型不确定性:滚转阻尼导数减小20%,偏航阻尼导数减小20%;(2)副翼效率损失30%;(3)非匹配不确定性
式中:g(x,t)为舰尾流干扰。
首先,以侧向偏移控制系统对阶跃指令的跟踪验证系统的性能,指令输入rcmd=[0°,10 m]T,仿真结果如图4所示。

图4 标称控制器阶跃指令跟踪Fig.4 Step response of lateral y with norminal controller
由图4可知,无不确定性时,标称控制器能够实现侧向偏移对阶跃指令的理想跟踪;引入上述不确定性时,跟踪误差加大,抑制侧风的能力也不明显,尤其是当副翼效率损失30%时,系统已经不能保持稳定。标称控制器实现了侧向模态解耦和跟踪控制,但是鲁棒性不足。
然后,考虑采用自适应方法补偿系统的不确定性,仿真结果如图5所示。由图5可知,引入上述不确定性对轨迹跟踪精度影响不大,并且与标称控制器相比,副翼与方向舵偏转均未超出饱和约束。
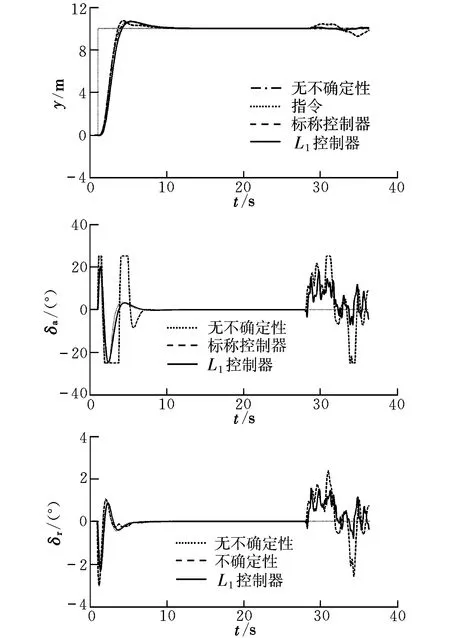
图5 L1自适应控制器阶跃指令跟踪Fig.5 Step response of lateral y with L1controller
侧向着舰引导控制要求舰载机沿斜角甲板(夹角11°)跑道中心线无侧滑着舰。考虑航母运动(母舰航速15.4 m/s),并且起始侧偏y0=10 m时,消除起始侧偏的动态过程如图6所示。
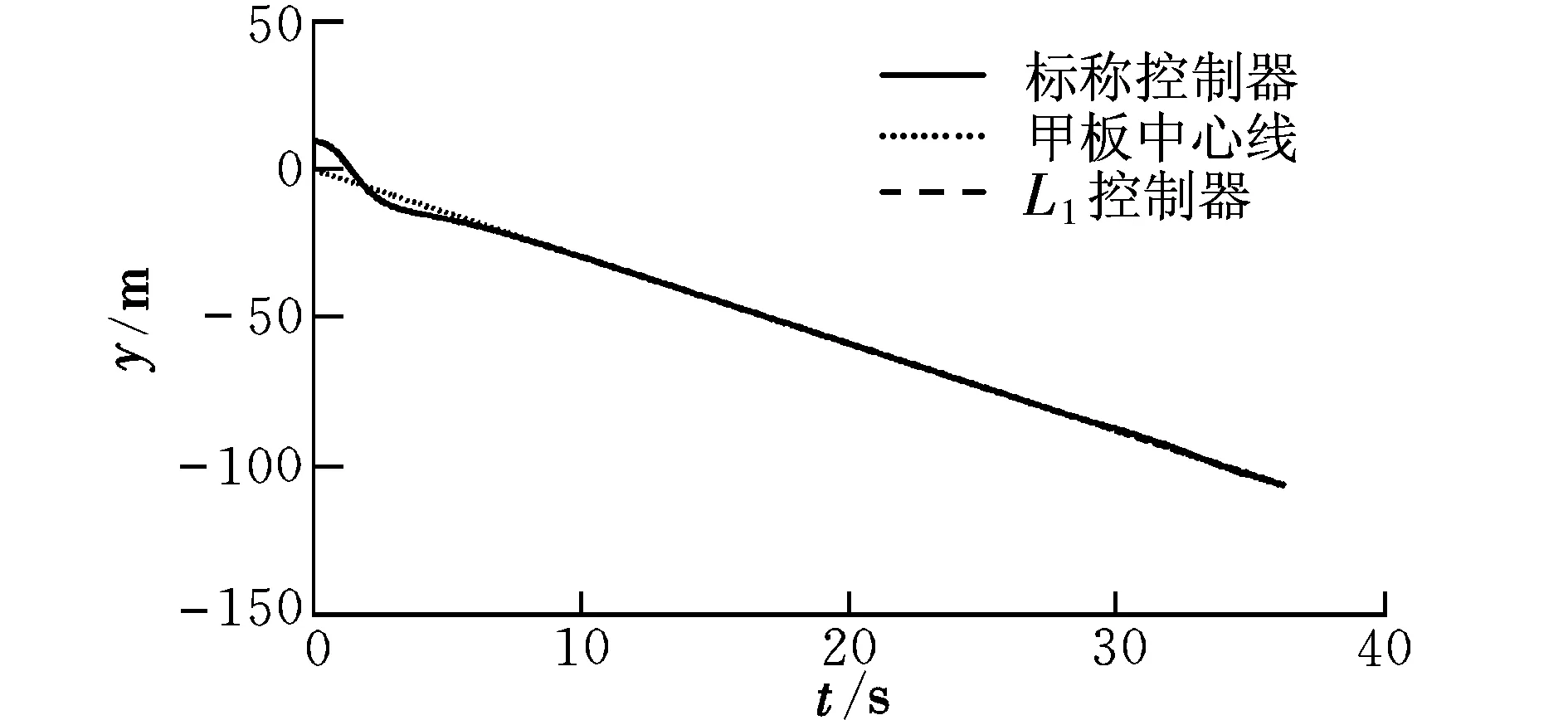
图6 考虑航母运动的侧向着舰Fig.6 Lateral carrier landing with carrier in motion
在随机舰尾流扰动作用下,经多次仿真,侧向着舰终端误差绝对值均值为0.696 m,满足精确着舰的指标要求。可见自适应控制器能够补偿系统不确定性的影响,显著抑制了舰尾流扰动,提高了着舰引导精度。
4 结束语
为改善侧向着舰性能,考虑采用姿态和轨迹内外回路进行综合化设计,采用特征结构配置实现系统模态解耦以及侧偏/侧滑角跟踪控制,并且设计L1自适应控制补偿内外回路中的模型不确定性、舵面故障、外部干扰及舰尾流影响。由于内外回路均采用非线性自适应控制方法进行补偿,因此其着舰精度优于线性标称控制器的设计。通过仿真,验证了内外回路综合设计的着舰引导控制律能够满足着舰要求,具有良好的鲁棒性能。
[1]Urnes J M,Hess R K,Moomaw R F.Development of the NavyH-dot automatic carrier landing system designed to give improved approach control in air turbulence[R].AIAA-80-1772, 1980.
[2]Urnes J M,Hess R K.Intergrated flight control system development the F/A-18A automatic carrier landing system[R].AIAA-83-2162,1983.
[3]Urnes J M,Hess R K.Development of the F/A-18A automatic carrier landing system[J].Journal of Guidance,Control,and Dynamics,1985,8(3):289-295.
[4]Urnes J M.H-dot automatic carrier landing system for approach control in turbulence[J].Journal of Guidance,Control,and Dynamics,1981,4(2):177-183.
[5]Pio Fitzgerald.Flight control system design for autonomous UAV carrier landing[D].East of England:Cranfield University,2004.
[6]Subrahmanyam M B.H-infinity design of F/A-18A automatic carrier landing system[J].Journal of Guidance,Control,and Dynamics,1994,17(1):187-191.
[7]邓娟.舰载飞机自动着舰纵向控制系统设计的理论与仿真研究[D].上海:复旦大学,2010.
[8]Nicholas A.Automated carrier landing of an unmanned combat aerial vehicle using dynamic inversion[D].Ohio:Department of the Air Force Air University,2007.
[9]杨一栋,余俊雅.舰载飞机着舰引导与控制[M].北京:国防工业出版社,2007:43-50.
[10]穆旭.特征结构配置在大型飞机飞行控制系统设计中的应用[D].西安:西北工业大学,2007.
[11]章卫国,李爱军,李广文, 等.现代飞行控制系统设计[M].西安:西北工业大学出版社,2009: 158-178.
[12]Hovakimyan N,Cao C.L1adaptive control theory-guaranteed robustness with fast adaptation[M].Philadelphia:SIAM,2010:121-122,160-163.
[13]Xargay E,Hovakimyan N,Cao C.L1adaptive controller for multi-input multi-output systems in the presence of nonlinear unmatched uncertainties[C]//2010 American Control Conference.USA:Marriott Waterfront,Baltimore,MD,2010:874-879.
(编辑:姚妙慧)
Design ofL1adaptive controller for lateral-directional automatic carrier landing
GAO Li, WU Wen-hai, MEI Dan, QU Zhi-gang
(Qingdao Branch, Naval Aeronautical Engineering Institute, Qingdao 266041, China)
To improve the automatic carrier landing system (ACLS) precision with uncertainties and external disturbance,L1adaptive based eigenstructure assignment is applied to the tracking control for inner and outer loop of lateral-directional carrier landing. Model decoupling tracking control is realized by eigenstructure assignment method.L1adaptive with piecewise continuity is used to compensate mismatched uncertainties and external disturbance. Simulation results show thatL1adaptive can deal with system uncertainties, actuator failures and external disturbance. Simulation study shows that the controller with integrated design has good tracking and disturbance rejection ability.
L1adaptive control; automatic carrier landing; eigenstructure assignment
2015-10-12;
2016-02-20; 网络出版时间:2016-04-22 09:52
高丽(1982-),女,山东临朐人,讲师,博士,主要研究方向为先进飞行控制技术。
V249.1; V271.492
A
1002-0853(2016)04-0041-05
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
纺织检测与标准(2019年2期)2019-03-24
雷达学报(2017年6期)2017-03-26
中国纤检(2016年10期)2016-12-13
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年1期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29
舰船科学技术(2015年8期)2015-02-27
长江科学院院报(2010年10期)2010-09-05
