缩微无人车车道线识别与控制
2016-08-31 07:27创新者杨伟建导师李小坚
中国科技信息 2016年6期
创新者:杨伟建 导师:李小坚
缩微无人车车道线识别与控制
创新者:杨伟建 导师:李小坚
本文主要是通过摄像头对实时路况进行采集,并对采集的图像进行预处理。获得图像中车道线信息和特征的二值图像,再利用霍夫变换对车道线进行识别。通过识别得到的车道线实现对无人车的智能控制,使其在两车道线之间正常行驶。
随着科学技术的发展和社会需求的增长,无人车得到了巨大的发展。人们对无人车的研究和利用正在逐渐地加深。对于学校而言,无人车成本较高,立足于对青少年进行智能机器人方面的教育,利用简单设备以及较低成本实现无人车在操场环境下的智能控制。本文通过对操场环境下,对跑道线进行处理和识别。通过检测到的跑道线的偏转方向控制小车在操场中两条跑道线之间正常行驶。
硬件
本文采用120*80(cm)大小的载人玩具车,并对小车进行改装。具体为:后轮采用直流电机为小车提供动力,前轮利用博创科技提供的CDS5500舵机控制小车的转向,并采用博创科技提供的BDMC3610直流伺服驱动器实现对电机与舵机的供电控制;通过自制电路板利用STM32实现对小车的控制以及与电脑进行串口通信;采用极速B18s摄像头对道路数据图像进行实时采集,计算机对采集得到的图像进行处理,然后根据处理结果向电路板发送相应的控制命令来控制小车的转向与行驶,使小车能在操场两跑道线内行驶。
图像预处理
针对操场环境下,车载摄像头采集图像预处理分为四个阶段,分别为灰度化处理、平滑处理、大津阈值变换以及边缘检测。
图像灰度化
一张彩色图像每个像素一般有R、G、B三色分量构成。而每个分量由不同的灰度级描述。每个灰度级可有255中变化。因此彩色图像的像素变化范围较大,采用灰度化处理可以使后续的图像的计算量变得少一些。图像灰度化处理主要有四种方法分别为分量法、最大值法、平均值法、加权平均法。针对操场环境下的图像,本文选用的是加权平均法。利用此种方法获得到的灰度图像的视觉效果比较好的。
图像平滑处理
平滑处理改善图像质量,抽象出对象特征。图像平滑处理方法有多种分别为归一化块滤波、高斯滤波、中值滤波以及双边滤波。平滑处理虽然能改善图像的质量,但是有些时候这些滤波器不仅仅削弱了噪声, 连带着把边缘也给磨掉了。为了避免这样的情形 (至少在一定程度上),本文使用双边滤波,不仅改善图像的质量还能有效的保护好车道线的边缘。
图像大津阈值变换
大津阈值处理OTSU算法也称最大类间差法,在图像分割阈值选取的众多方法中,此方法被认为是最佳的算法。此种方法不仅计算简单,而且不受图像亮度和对比度的影响。所以该算法被广泛的应用于数字图像处理上。针对本文采集的图像环境,采用此方法能较好地获得二值图像。
图像的边缘检测
对于图像边缘检测本文采用Sobel算子。Sobel导数拥有一个相对比较好的性质,即可以定义一个任意大小的核,并且这些定义的核可以通过快速且迭代的方式来构造。大核对导数有更好的逼近,小核对噪声更敏感。
经过上述预处理可得到下面的实验结果,预处理得到的图像如图1所示。
车道线识别
采用霍夫变换实现对车道线检测,霍夫变换运用两个坐标空间之间的变换将在一个空间中具有相同形状的曲线或直线映射到另一个坐标空间的一个点上形成峰值,从而把检测任意形状的问题转化为统计峰值问题。本文把实际空间坐标函数映射到图像像素坐标函数上,利用极坐标公式

来表达实际空间的任意直线,ρ、θ为已知量。将实际空间坐标映射到图像空间坐标上,ρ、θ为未知量,将θ角在0度到180度的范围里划分为很多区间,对所有的像素点(x,y)在其对应的θ角时求出对应的ρ,从而累加ρ值出现的次数,高于某个阈值的ρ就是一条直线。针对霍夫变换处理时间过长的问题,在实验中发现,对车道线进行识别后的两条白线在特定的角度范围内,根据实际测试后的数据设定左侧车道线的极角范围为20到70,右侧车道线范围为110到160范围之间,通过缩小极角范围能有效的缩短霍夫变换处理的时间,提高运行效率。通过霍夫变换可以得到识别出的两条车道线在视频图像上的顶端和底端像素坐标,求得左右车道线在图像顶端像素坐标的平均值,即为车道中间线在图像坐标上顶端的像素坐标。同样的方法求得中间线在图像坐标底端的像素坐标。根据顶端和底端的像素坐标求得两车道线的中间线如图2所示。

图1 预处理得到的图像
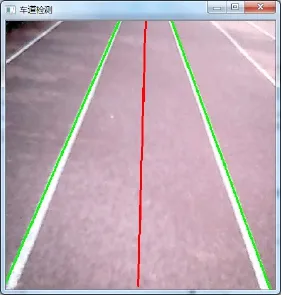
图2 车道中间线效果图
对无人车的控制
车辆在两车道线正中间时,中间线顶端和底端在图像坐标x轴上像素坐标值几乎相等(存在几个像素点的误差)。车辆在两车道线中间行驶过程中发生偏转时中间线也会发生相应的变化,车辆往左偏时中间线往右偏,车辆往右偏时中间线往左偏。根据中间线顶端与底端像素坐标在x轴上的差值正负来判断小车往左转向还是往右转向,根据差值大小来控制小车的偏转的角度,使小车能正确的在两条白线之间行驶。
结束语
在特定的速度下已满足在操场环境下的小车正常行驶,下一步要增加小车运行的速度档位,发生相同偏转时在不同速度下控制小车偏转不同的角度。另一方面需要加强对视频画面的抖动处理,车速过快将使采集到的画面发生抖动,可采取物理方式加垫片和软件方式对比连续三帧画面处理结果的方法消抖。
DOI:10.3969/j.issn.1001-8972.2016.06.018
猜你喜欢
中外文摘(2022年8期)2022-05-17
卫星应用(2021年11期)2022-01-19
中老年保健(2021年4期)2021-08-22
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
少先队活动(2020年8期)2020-12-18
少先队活动(2020年7期)2020-08-14
小猕猴学习画刊(2020年6期)2020-06-29
小读者·爱读写(2019年5期)2019-09-10
晚报文萃(2016年7期)2017-01-10