
水下机器人压载释放装置的设计
2016-09-08 02:22付佳杰
新技术新工艺 2016年6期
唐 娟,付佳杰
(中国船舶重工集团公司 第七一○研究所,湖北 宜昌 443003)
水下机器人压载释放装置的设计
唐娟,付佳杰
(中国船舶重工集团公司 第七一○研究所,湖北 宜昌 443003)
介绍了压载释放装置的工作原理及用途,分析了应急抛载成功的关键因素,提出了压载释放装置的设计方法。针对实际使用中发现的问题,对压载释放装置的设计进行了优化。
应急;直线电动机;释放压载
海洋世界蕴藏着丰富的资源,近几十年来,人类对海洋的探索工作在不断地深入。深海能源开采、海底科学研究、海洋救助与打捞等深海作业的迅速发展,必然会对水下机器人提出更高的需求。为了有效利用海洋丰富的资源,世界各国都在大力开展深海探测技术的研究[1-3]。
水下机器人由于工作环境的未知性,在作业过程中很容易遇到各种突发的紧急状况,此时需要机器人具有可靠的应急处理能力。一般通过压载释放装置抛弃重物,使水下平台获得正浮力上浮回收。压载释放装置的主要功能是接收释放压载的指令时,自动释放压载与本体脱离,从而获得正浮力上浮,起到应急保护的作用[4-5]。
1 结构组成与工作原理
1.1结构组成
水下机器人在水中航行时,压载释放装置是一种由于某种故障而导致失控的应急手段。当压载释放装置在满足条件或接收到指令后将迅速执行释放压载的动作,使运载平台快速上浮。在突发紧急状况时,压载与壳体的分离是水下机器人获得正浮力最重要的手段之一,工作可靠性要求很高;压载释放装置的动作失败,将会导致水下机器人无法上浮,而其误动作将出现不应有的上浮动作。因此,压载释放装置的设计应充分保证其工作的可靠性和及时性。
整个装置主要包括密封盖、安装架、直线电动机、电动机驱动板、释放轴、钢球以及电缆密封件等。在遇到紧急状况时,接收到控制系统发送的释放指令,则释放压载。整个装置结构如图1所示。
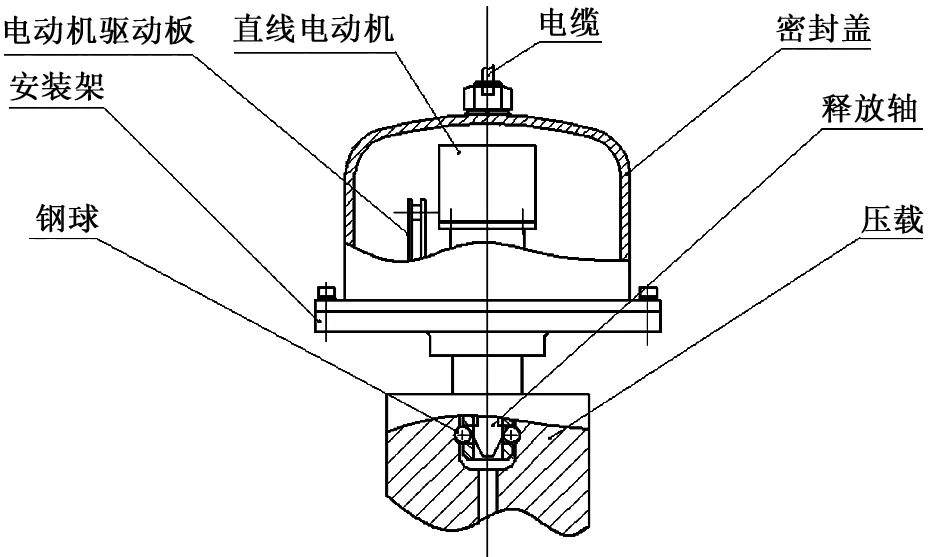
图1 压载释放装置结构组成
1.2工作原理
压载装载过程:压载向上装入释放装置到位后,由控制系统给电动机驱动板上电,控制电动机带动释放轴向下运动,利用其端部的锥度,可轻松地将钢球推向外侧使之进入压载的凹槽。此时,释放轴顶着钢球,钢球紧靠释放轴外侧,压载被锁定,完成装载。
压载释放过程:遇到紧急状况时电动机驱动板接收控制系统释放指令,控制电动机带动释放轴向上运动,运动行程达到一定值时,钢球解锁,压载在自身重力作用下脱落。
2 零部件设计
2.1释放轴设计
根据释放压载的质量以及安装空间尺寸,初步确定释放轴直径大小,选定释放轴密封圈型号。
2.2直线电动机设计
根据释放压载的质量求得释放轴的摩擦力Fs,以及释放轴所受到的水压力F1。此时,释放轴上O型圈所受的摩擦力可忽略不计,则电动机轴的最大工作负载为:
F=F1-Fs
根据计算所得的电动机负载,选择合适的直线电动机。直线电动机由电动机驱动板内部的程序控制,电动机的运行行程可自行设定,从而满足装载和释放的功能要求。
2.3密封盖厚度计算
在进行密封盖耐压壳体设计时,应确保壳体强度和稳定性要求,但密封盖耐压壳体受海水压力的外压作用,属外压容器,它往往不是因为强度不足被破坏,而是当外压增大到一定值时,壳体丧失其稳定性,从而造成耐压壳体的破坏,即失稳现象;因此,在计算受外压的密封盖耐压壳体时,可不必用薄壳理论的复杂计算公式计算强度,而只进行保证壳体稳定性的计算就能满足实用要求。
密封盖常用材料有钢、镁合金、钛合金、铝合金、复合材料、玻璃钢和有机玻璃等。通过比较常用耐压壳体材料的性能,并考虑轻质、高强度和耐腐蚀等要求,选用5A06铝合金材料,该材料耐腐蚀性较好,焊接性较好,适合工作水深的耐压要求。壳体的厚度t计算如下:

根据结构及加工实际情况,选取壳体厚度最小值。
2.4密封盖稳定性校核
密封盖的尺寸参数一般属于短圆筒结构,因此,其稳定性校核按照短外压圆筒计算。根据拉姆公式计算短圆筒的稳定性:
式中,Pcr2是失稳破坏压力;E是材料弹性模量;L是密封盖长度;D是密封盖外径。
当Pj 2.5其他零部件设计 1)对于压载质量较大的钢球应进行强度校核。 2)安装架强度应进行校核,其受力情况简化为圆环板受力分析。整个平板上作用均匀载荷,大小按最大工作水压计算。 本文设计的压载释放装置结构简单,安全性好,且工作可靠。该型装置可应用于水下机器人的抛载系统,当在水底作业出现紧急状况时,发送命令控制压载释放装置抛弃压载,可使运载平台获得正浮力上浮至安全水域。 [1] 蒋新松,封锡盛,王棣棠.水下机器人[M].沈阳:辽宁科学技术出版社,2000. [2]金碧霞,彭阿静.某水下机器人电池组固定方式改进设计[J]. 新技术新工艺, 2014(7):58-60. [3] 朱继懋.潜水器设计[M].上海:上海交通大学出版社,1992. [4] 唐荣庆,曹智裕,张希贤.“探索者”号自治式水下机器人抛载系统的研制[J].海洋工程,2001,19(2):85-87. [5] 王璇,高波,刘涛,等.一种水下固体抛载装置的设计[J].机械工程师,2010(7):35-37. 责任编辑郑练 The Design of Underwater Vehicle Ballast Ejection Device TANG Juan, FU Jiajie (710th Research Institute of China Shipbuilding Industry Corporation, Yichang 443003, China) Introduce the working principle and use of ballast release device, analyze the key success factors for emergence ejection, and put forward the design method of ballast ejection device. In view of the problems found in the actual use, the design of ballast ejection device is optimized. emergency, linear motor, releasing the ballast TP 242 B 唐娟(1982-),女,硕士,主要从事水下机器人等方面的研究。 2016-12-253 结语
猜你喜欢
大电机技术(2022年5期)2022-11-17
舰船科学技术(2022年11期)2022-07-15
中国特种设备安全(2022年1期)2022-04-26
昆钢科技(2021年2期)2021-07-22
舰船科学技术(2021年12期)2021-03-29
哈尔滨轴承(2020年4期)2020-03-17
中国交通信息化(2020年12期)2020-02-06
石油化工建设(2019年6期)2020-01-16
中国特种设备安全(2019年9期)2019-12-03
中国交通信息化(2019年7期)2019-10-08
