基于车辆之间实际距离的快速交通状况检测算法
2016-09-26 07:20宋俊芳王卫星薛世焦宋焕生
计算机应用与软件 2016年3期
宋俊芳 王卫星 陈 艳 薛世焦 宋焕生,3
1(长安大学信息工程学院 陕西 西安 710064)2(西藏民族学院信息工程学院 陕西 咸阳712082)3(陕西省道路交通智能检测与装备工程技术研究中心 陕西 西安 710064)
基于车辆之间实际距离的快速交通状况检测算法
宋俊芳1,2王卫星1陈艳1薛世焦1宋焕生1,3
1(长安大学信息工程学院陕西 西安 710064)2(西藏民族学院信息工程学院陕西 咸阳712082)3(陕西省道路交通智能检测与装备工程技术研究中心陕西 西安 710064)
交通状况检测与预警是交通信息检测系统中一个很重要的组成部分,它对城市交通管控和诱导有着重要的指导意义。基于视频图像的灰度和边缘特征,首先采用差分算法计算出各车道中轴线上像素点的灰度梯度,并对梯度函数结合“像素-距离”的映射关系,按距离聚类分析法完成其对应曲线上脉冲的合并与数值量化;然后根据量化结果,对各车道的有车区域和无车区域做出标识,并对有车区域的分布密度做出统计;最后,结合对车道中轴线上像素点的灰度帧差处理结果,对交通状况做出精确判断。经实验验证,该算法能对道路的交通状况做出准确、实时的判断,且算法简单稳定,具有很好的实用价值。
交通状况检测灰度差分帧差像素-距离映射关系
0 引 言
早期的道路交通管理部门主要依靠人工方式观察道路上交通流的交通状况,由于当时的路网规模较小、交通需求与供给的矛盾尚未激化,常发性交通拥挤状况较少。因此,这种依据人工方法发现道路交通运行效率的交通管理模式在很长时间内能够维持道路交通的正常运转[1]。后来,随着道路上的车辆逐渐增多,车辆的拥堵和排队已然成为一个常发性问题,靠以前传统的人工观察方法已不能满足交通管理对数据的要求。因此,如果能够通过技术手段实时获取道路上的动态交通状况,为交通诱导提供可靠的数据支持,则可以有效地缓解交通拥挤,提高道路使用效率,而对于这方面的技术研究,最早始于国外。如二十世纪80、90年代欧美国家和日本大力推行的智能交通系统就是:以电子设备为手段将采集到的交通流信息用于交通控制信号的配时和交通事件的自动检测。它把智能检测技术集成到交通监控系统中,以提高交通管理部门检测、清理交通事故和疏导交通拥堵的能力[2]。最初,在此智能系统中针对交通状态的判断算法都是以发现道路上的突发交通事件为目的而设计的。如加利福尼亚算法[1,3,4],这种算法开发于1965年—1970年之间,最初用于洛杉矶公路管理控制中心。加州算法通过比较邻近监测站之间的交通参数数据,主要是比较环行线圈检测器获得到的占有率数据,对可能存在的突发交通事件进行判别。再如1974年,Cook开发的一种双指数平滑(DES)算法[1,4]。这种方法以交通参数数据的双指数平滑值作为预测值,通过比较交通参数数据的预测值和实测值来构造一个跟踪信号,当该跟踪信号超过预定的阈值时,可触发突发交通事件警报。而独立的针对交通状态自动判别ACI(AutomaticCongestionIdentification)方法的研究真正始于1988年,Persaud[4]等人根据突变理论开发了McMaster算法,使用大量的拥挤和非拥挤交通状态下的流量占有率历史数据,开发了一个流量占有率分布关系模板。通过将观测数据之间的关系与模板进行两次比较,判断是否发生了交通拥挤以及发生的是偶发性拥挤还是常发性拥挤。这种算法第一次将大交通需求引起的常发性拥挤作为了分析判断的对象,并进行了深入的研究。在此之后的一段时间,学者们针对这一问题展开了大量研究,但大部分都是以感应线圈采集的交通流量、道路占有率和车辆速度等交通数据为指标对交通状态进行判别的。直到1993年,伴随图像处理和计算机视觉技术的成熟,Perrin等发现使用视频图像处理技术进行交通状态的判别比基于感应线圈的判别算法有很多独特的优点[5]。感应线圈只能采集某一地点的交通流数据,且对安装的要求比较高,施工量也大,维修成本也较高。而视频图像处理技术在传统电视监视系统的基础上,将计算机视觉引入到交通信息检测系统中,运用图像处理技术可以获取所需的各种数据信息,且安装简单、操作容易、维护也方便。之后,基于视频分析的以交通流量、道路占有率和车辆速度等交通指标为特征的交通状况检测算法频频出现。在国内,具有代表性的有:庄斌等人提出的城市道路路段上交通拥挤的平均占有率自动检测算法[6];李晓斌等人提出的基于RBF神经网络的高速公路交通状况判别方法[7];肖永来提出的基于SCATS采集数据的城市道路交通状态判别技术[8]等。他们都是以固定或者移动检测器所探测到的道路流量密度、道路占有率、车辆速度等作为交通状况判断的联合依据,根据实际的路网通行能力,设定流量、占有率和速度的极限值或者以他们为输入数据,预测出一个输出值来划分交通处于哪一个状态。采用这类方法虽然在准确度上有明显的优势,但实时性都较差。在提高实时性上,杨媛等人提出了一种以平均车辆速度为特征的交通状况检测方法[9],但是其准确度还是依赖于对速度的预测,算法不够独立,且先检测速度,后判断交通状况,起不到对交通参数检测和交通事件检测的提前预测。本文以算法简单,功能实现独立为目的,针对图像中车辆的灰度和边缘特征进行深入分析,并结合“像素-距离”的映射关系,提出一种基于车辆之间实际距离的快速交通状况检测算法。该算法简单稳定,可靠性强,具有很好的应用前景。
1 算法总流程
本文主要针对正常的道路场景进行了大量的分析研究,进而开发了一套适用于正常道路场景(非斑马线,非减速带)的交通状况自动检测算法。
图1为交通数据库中某路段视频序列中随机的一帧图像。从图中看出,每个车道路面上的无车区域在灰度图像中较为光滑,且近邻区域的灰度较为接近(如图片近端),而有车区域则有明显的灰度跳变和边缘存在(如图片远端)。介于这样的交通图像特点,本文提出分车道分析各车道中轴线上像素点在邻域范围和序列帧之间的灰度变化。并通过对这种变化的量化表示,结合“像素-距离”的映射关系描述出各车道车辆的分布情况。最后将车辆分布情况按其预示的不同交通状况进行聚类,并对拥堵状态做出预警显示。

图1 正常道路场景
其算法的流程如图2所示,算法的核心主要集中在“像素-距离”映射关系的建立以及车辆的存在性检测和有车区域的运动判断。
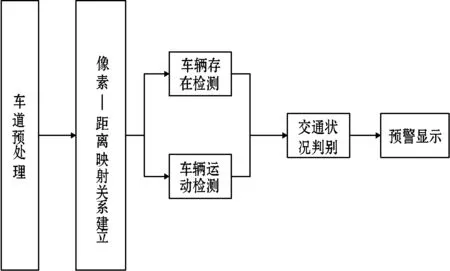
图2 交通状况检测算法流程
2 车道预处理与映射关系建立
2.1车道划分与距离标注
车辆在正常情况下(无变道、逆行发生),都是以车道隔离线为边界,沿车道按秩序顺序行驶的。本文结合这一实际情况,提出了分车道对交通状况进行判断的思路。在现实交通场景里,那些显著的白色等间隔短线就是交管部门为了对车辆的运行轨道进行隔离而设立的。在这部分车道划分就是在视频图像上,如何通过在白色短线上取点,进而拟合出能代表实际车道隔离线的直线,作为图像中车道的分界线。本文以车辆离开方向的道路场景为例,用最小二乘法对选取点拟合的结果如图3所示,道路场景的右边按车道被分成了两个检测区域,分别标记为1车道和2车道。
为进一步计算图像中“像素-距离”的映射关系,首先需要对车道进行简单的距离标注,其标注方法如图4所示。分别选取车道隔离线上对应的等距离映射点,其中点N,点M和点F代表车道中间线上的三个代表性的映射点。以这三个点为基准将整个道路分成了四段,并用箭头指示出每段映射关系求取时的方向,然后由摄像机架设位置和角度以及几何透视原理[9]便可推导出各段内任意点所对应的实际路面距离。假设中间两段的像素距离用n和m表示,在选点时,要保证n和m所代表的实际路面距离要相等。

图3 车道划分

图4 距离标注
2.2映射关系建立
在以往的交通状况判断算法中,仅局限在二维图像中所反映出的特征信息,对于还原真实三维空间中的交通场景并未考虑。其实,在判断交通状况时,如果能够从车辆之间的实际距离出发,这将是最直观、最简单的判据。要想得到车辆位置之间的实际距离,首先要求出图像中像素点对应的路面实际距离。我们把求取图像中每个像素点所代表的路面实际距离的过程称之为“像素-距离”映射。在映射关系建立过程中,针对我们的研究对象(车道中轴线),在这里只需考虑纵向实际距离,对横向距离可以忽略不计。因此在推导实际距离时,可以假设路面实际距离只随像素行的递增而变化,即认为同一像素行上的所有像素点其对应的路面实际距离是相等的,这样用一个一维数组MappedDis[y]就可以表示图像上每个像素点对应的实际距离。具体几何推导过程如示意图5所示,O点相当于摄像机的焦点,DC代表的是中间车道线,EF为摄像机镜头,也就是视频图像上所显示的平面。

图5 透视关系几何推导示意图
其中N、M、F所对应的实际道路路面点为A、B、C,且AB=BC。在视频上找一个点E(图中所示为第一种情况,E点位于N点左侧的分段),E点所对应的路面上的点为D,所以,关键问题就是要找出视频图像中像素距离EN所对应的实际距离DA。首先做两条辅助线,DH和AG,平行于EF。
则已知条件分别为:
AB=BC,并且AB和BC都已知;
NM和MF的像素距离已知;
EN的像素距离已知;
EF//DH//AG(//表示平行,Δ表示三角形)。
求:DA的实际距离用已知参数表示。
求解方法如下:
将DP、QH、AK代入下面两式:



(1)
同理,求出其他几种情况的结果:
第二种情况,E点在NM之间:
(2)
第三种情况,E点在MF之间:
(3)
第四种情况,E点在F点右边:
(4)
以上关系式由摄像机位置和角度根据光学原理推导而来,具有准确性和科学性。根据这四个关系式,可以计算出图4中1、2、3、4段内所有像素点对应的实际距离。在计算过程中,可以将上述关系式简化为如下公式:
(5)
(6)
(7)
(8)
其中t1、t2、t3和t4分别表示1、2、3、4段内像素点对应的实际距离,a为m、n所代表的实际空间距离,一般是6米。l表示各段内某像素点到其基准像素点的绝对像素距离。图像中其余部分的实际距离可以循环利用上述公式得到。最后将所有像素行[0,287]的实际距离存储到数组MappedDis[y]中,我们把这个一维数组称作像素到距离的映射表,通过查找表,可以求出任意两行上像素点之间的实际距离。如表中MappedDis[268]=9116cm,MappedDis[120]=1800cm,则可以得出图像中第120行上任意像素点到268行上任意像素点之间的实际距离为:MappedDis[268]-MappedDis[120]= 7316cm。
为了验证此映射关系的准确性,将表中对应的数据变化关系用函数曲线描述如图6所示,随着像素行的增大,其实际距离呈抛物线递增趋势。在映射过程中,为了方便计算,将所有的距离都转化为以图片底端为基准点的实际距离。因此从图中可以看到,图片最底端像素对应的实际距离为0,且在图片近端,实际距离变化趋势较缓,而在图片远端像素点所代表的实际距离迅速增加,这正好符合几何透视原理。在摄像机视野近处,图像中目标较大,像素点之间的实际距离较小,但在远处,虽然目标很小,像素点之间的实际距离却很大。
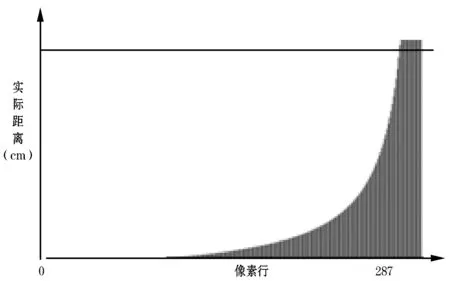
图6 像素-距离映射关系变化曲线
通过上述车道划分和映射关系的建立,我们不仅将图片按照实际车道分成了几个相似的检测区域,同时建立了一个像素到距离的映射关系表,为交通状况的判断奠定了基础。
3 交通状况检测与预警显示
为了很好地描述道路的拥挤情况,将交通状况从总体上划分为三级:畅通、饱和和拥堵。它们之间是相互关联的,且状态之间当达到一定条件时,会相互转换,基本上都符合从畅通到饱和再到拥堵或者从拥堵到饱和再到畅通这样的规律。
交通状况检测可分为两步,车辆存在检测和车辆运动检测。近些年有很多学者对车辆存在检测和运动检测进行了研究[10-13]。也有部分学者将这两者结合起来实现车辆排队长度的检测[14,15]。本文也是基于这样的思路,结合车辆存在检测和运动检测对道路交通状况进行实时判断与预警,但在车辆存在检测和运动检测方面,算法比以往简单、新颖,且效果直观,有利于交通状况更加形象准确地判断。
3.1车辆存在检测
按照交通规则,车辆在道路上正常行驶是不允许跨越车道隔离线和隔离带的。因此大部分车辆都是压着车道中轴线行驶的,介于这样的考虑,本文提出通过计算车道中轴线上灰度的变化来进行车辆存在检测并确认运动区域。车辆存在检测分为关键两步:(1) 求取灰度差分函数;(2) 聚类分析与量化处理。
首先假设车道中轴线上像素点的行坐标x与车道序列y组成一个表示灰度信息的二维函数f(x,y),则f(x,1)、f(x,2)分别为1车道和2车道中轴线上像素位置x所对应的灰度,其函数关系如图7所示。从图中看出,灰度曲线在有车辆的位置处,存在明显的脉冲序列,这些序列的形成始于目标边缘的突变,如果从图中可以明显地分辨出突变位置,则就可以准确地定位出车辆的头部和尾部像素位置。
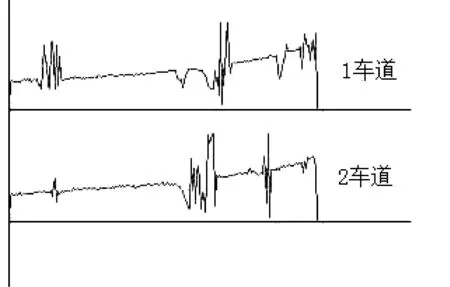
图7 车道中轴线上灰度分布曲线图
接下来为了放大函数的这种突变,进而方便检测车头和车尾,引入梯度运算分别对f(x,1)、f(x,2)这两个函数进行求导,具体公式如式(9)所示。通过计算相邻像素点之间的灰度差来反应梯度变化。
(9)
为了减小函数的噪声干扰,在计算中,如果只考虑车道中轴线上一个像素点的灰度值是不够的,所以,对每个像素点我们都以车道中轴线为中心,像两边延生出一定范围并求取其均值作为该像素点对应的灰度值进行差分运算。对差分结果我们进一步通过平滑去噪得到其对应的函数关系,如图8所示。
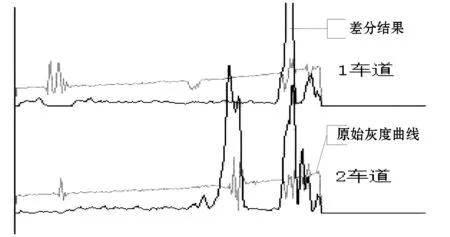
图8 车道中轴线上灰度差分曲线图
从图8中对比发现,经过对车道中轴线上像素点的梯度运算,不仅消除了无车路段的噪声脉冲,还使有车路段的脉冲边缘更加显著,依据这样的函数曲线所描述的信息,可以对有车区域和无车区域做出初步判断。为进一步根据车辆区域的分布密度判断当前的交通状况,本文将差分结果中相邻的脉冲按像素距离和路面实际距离进行聚类分析并量化。其操作流程如图9所示。

图9 差分函数合并、量化流程图
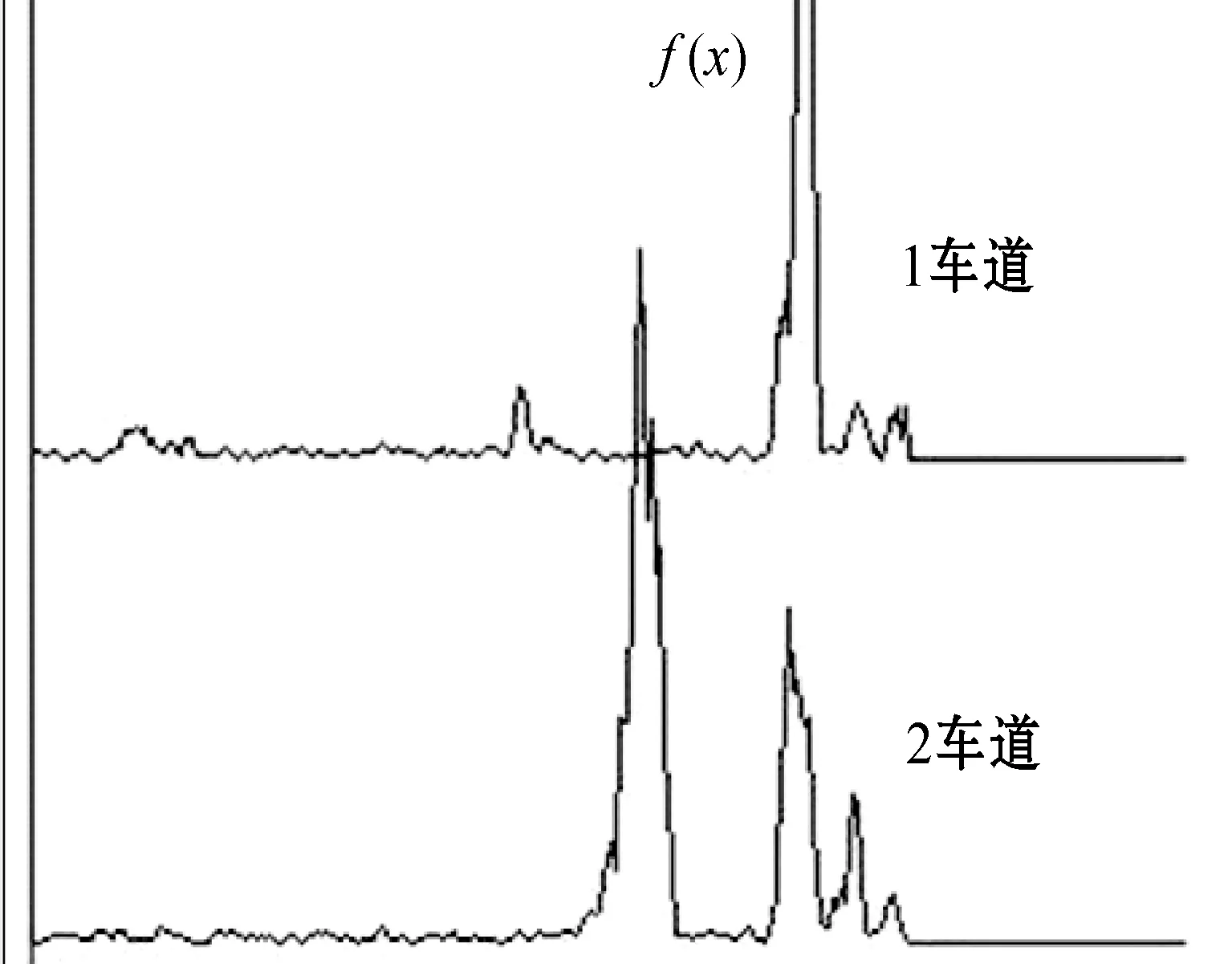
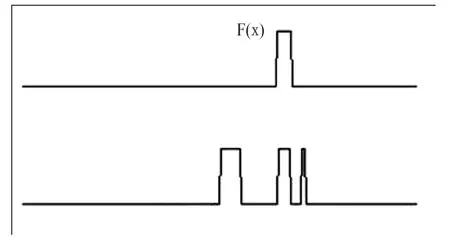
首先通过相邻脉冲的像素位置查表求出其对应的实际路面距离。设上一个脉冲结束的位置坐标为x1,第二个脉冲起始的位置坐标为x2,第一个脉冲结束位置对应的路面实际距离为s1,第二个脉冲起始位置对应的路面实际距离为s2,则对于满足条件:x2-x1 图10 差分函数合并量化结 3.2运动检测 运动检测是用来区分车辆饱和和拥堵状态的,将各车道中轴线对应像素点的灰度值与相邻帧相减,得到帧差结果f(x), 并通过分析f(x)函数曲线,如图11所示,判断出运动车辆区域。其计算公式如下: f(x)=|f1(x)-f2(x)| (10) 图11 车道中轴线上灰度帧差曲线图 其中,f1(x)为当前帧x点对应的灰度值,f2(x)为前一帧x点对应的灰度值。同样,对帧差函数f(x)按3.1节聚类分析方法进行平滑,合并及二值量化处理,得到如图12所示的方波脉冲函数F(x)。 图12 帧差函数合并量化结果 从图中看出,方波脉冲函数将车道上存在运动的区域清晰地分割了出来。如:1车道合并之后的车辆区域在图12中运动分布所占比例接近一半,2车道合并之后的左侧区域在图12中运动分布比例达到100%,而右侧区域在图12中出现两个方波,中间存在一段无运动的区域,这些数据信息,是饱和、拥堵状况区分的关键。 3.3交通状况判断 结合灰度差分和帧差方波图10、图12,对道路交通状况进行判断,其流程如图13所示。设差分函数方波第j个脉冲的起始位置坐标为x1j,结束位置坐标为x2j,起始位置对应的路面实际距离为s1j,结束位置对应的路面实际距离为s2j。首先依次对差分函数波形中的脉冲判断其始末像素位置距离和路面实际距离,对于像素距离x2j-x1j>a且路面实际距离s2j-s1j>b的脉冲,我们将之统计记录在状态持续长度计数器Cal[y]中,作为交通状况进一步区分判断的首要条件,其中a、b为常量。接下来判断Cal[y]的值,当它为0时,说明车道畅通,没有出现车辆密集区域;当它大于阈值c时,说明路段出现拥挤,在这种情况下,将前面统计记录好的差分函数方波脉冲与和其位置相对应的帧差方波脉冲做“与”运算;当车辆存在区域发生运动的比例达到d%时,我们认为车道车辆达到了饱和,否则,当运动比例很小时,认为车辆已处于拥堵排队状态。按照此流程分车道对交通状况做出判断,并给出相应的预警提示信息。 图13 交通状况判断流程图 4.1实验结果 为测试本文所采用的交通状况检测算法的性能,以西安市南二环路口所拍摄的视频图像为例进行测试实验。由摄像头采集的数据为每秒25帧的视频流,即播放一帧的时间为40ms,根据路口交通控制的实时性要求,为了较少运算量,我们将原始图像转换为分辨率为720 × 288 的灰度图像进行处理分析。经试验验证,本文所论述的车辆交通状况自动检测算法是有效可行的,它能够实时地检测出道路交通状况的变化,并做出准确判断,并且它将车辆之间的实际距离作为判据,效果更为直接,具有很好的应用前景。图14、图15分别为道路上出现饱和、拥堵排队时的预警示意图,图中显示了某一时段内三车道道路交通的实际检测结果,矩形框区域表示了饱和、拥堵排队状态出现时瞬时所延伸的最大距离,这种方法与人为观察的实际情况相比,得到了理想的效果。 图14 道路饱和预警 图15 道路拥堵排队预警 4.2实验分析 为了进一步定量分析本文提出算法的优点,从预警准确率、误警率、漏警率这三个指标出发,对其性能评价如表1所示。表中显示了针对西安市南二环路视频数据9293帧中,三个车道Lane1、Lane2、Lane3分别得到的预警结果,以及最后的平均结果。 表1 道路交通状况预警结果 另外,针对西安市南二环路视频数据,用文献[9]提出的算法也进行了验证。用4GB内存的计算机,在VC++6.0语言环境下运行,得到文献[9]和本文算法的对比结果,如图16所示。在图中,从算法耗时、预警准确率、误警率和漏警率四个方面可以明显的看出,本文提出的方法不仅有较高的准确度,且实时性较好,整个算法耗时只有0.0046s,对智能交通检测系统来说,所占时间甚少,但是却为交通参数检测和交通事件检测奠定了重要基础。 图16 算法比较结果 针对道路交通状况,本文提出了一种基于车辆之间实际距离的检测算法。运用灰度差分和帧差检测出车辆的存在位置和运动状态,并通过距离聚类分析对交通状况作出判断。这种方法经测试,在西安市南二环路口视频数据中,能准确实时地判断出当前道路的交通状况,并可以对异常交通状况进行预警显示。与其他方法相比,它具有可靠性高、算法简单、实用性强等优点,因此,该方法可以作为交通管理部门全面实时了解道路交通状况的一个重要手段。 [1] 於毅.城市道路交通状态判别方法研究[D].北京:北京交通大学,2006. [2]TateWL,EllramLM,CarterCR.Theimpactofsupplymanagementonenvironmentalperformanceoutcomes[C]//InternationalSocietyforOpticsandPhotonics,2004: 94-105. [3] 佘永业.基于光流速度与状态模型分析的高速公路交通状态检测算法研究[D].广州: 中山大学,2010. [4] 姜桂艳.道路交通状态判别技术与应用[M].北京.人民交通出版社,2004:32-109. [5]PerrinJ,HansenB,KumpR,etal.Incidentdetectionalgorithmevaluation[R].Utah:UniversityofUtah,2001:8-14. [6] 庄斌,杨晓光,李克平.道路交通拥挤事件判别准则与检测算法[J].中国公路学报,2006,19(3):82-86. [7] 李晓斌,徐建闽.基于RBF神经网络的高速公路交通状况判别[J].计算机仿真,2011,28(2):350-353. [8] 肖永来.基于SCATS采集数据的城市道路交通状态判别技术研究[J].中国交通信息产业,2005,7(6):39-41. [9] 杨媛,刘雪琴,彭玲玲.一种基于视频的交通状况检测方法[J].电视技术,2013,37(23):204-206. [10] 马颂德,张正友.计算机视觉—计算理论与算法基础[M]. 北京: 科学出版社,2003. [11]ShiX,LingH,BlaschE,etal.Context-drivenmovingvehicledetectioninwideareamotionimagery[C]//PatternRecognition(ICPR),2012 21stInternationalConferenceonIEEE,2012: 2512-2515. [12]ErbsF,BarthA,FrankeU.Movingvehicledetectionbyoptimalsegmentationofthedynamicstixelworld[C]//IntelligentVehiclesSymposium(IV),2011IEEE,2011: 951-956. [13]HuangDY,ChenCH,HuWC,etal.Reliablemovingvehicledetectionbasedonthefilteringofswingingtreeleavesandraindrops[J].JournalofVisualCommunicationandImageRepresentation,2012,23(4): 648-664. [14]SongJF,HuangC,XueR.Apracticalupdatingbackgroundmethodinmovingtargetdetection[C]//ConsumerElectronicsCommunicationsandNetworks(CECNet),2012 2ndInternationalConferenceonIEEE,2012:2322-2324. [15]YaoYJ,WangKF,XiongG.Embeddedtechnologyandalgorithmforvideo-basedvehiclequeuelengthdetection[C]//ServiceOperationsandLogisticsInformatics(SOLI),2013IEEEInternationalConference,2013:45-50. [16] 杨永辉,黄磊,刘昌平.基于视频分析的车辆排队长度检测[J].计算机应用研究,2011,28(3):1037-1041. FASTTRAFFICSITUATIONDETECTIONALGORITHMBASEDONACTUALDISTANCEBETWEENVEHICLES SongJunfang1,2WangWeixing1ChenYan1XueShijiao1SongHuansheng1,3 1(School of Information Engineering,Chang’an University,Xi’an 710064,Shaanxi,China )2(School of Information Engineering,Tibet Institute for Nationalities,Xianyang 712082,Shaanxi,China )3(Shaanxi Engineering and Technique Research Center for Road and Traffic Detection,Xi ’an 710064,Shaanxi,China) Trafficsituationdetectionandearlywarningisanimportantpartintrafficinformationdetectionsystem,ithassignificantguidancemeaningtourbantrafficcontrolandinducement.Basedongrayscaleandedgefeaturesofvideoimages,inthearticlewefirstusedifferencealgorithmtocalculatethegrayscalegradientofpixelpointsinmiddlelineofeachlane,andthenforgradientfunction,accordingtodistanceclusteringanalysismethodwecompletetheaggregationofpulsesonitscorrespondingcurvesandthequantificationofnumberincombinationwithmappingrelationshipbetweenpixelanddistance;thenext,accordingtotheresultsofquantificationwemarktheregionswithandwithoutvehiclesoneachlane,andmakethestatisticsonthedistributiondensityoftheregionswithvehicles.Finally,combiningtheprocessingresultsofgrayscaleframedifferencesforpixelpointsonmiddlelineoflane,wegiveprecisejudgementonthetrafficsituations.Itisverifiedbyexperimentthatthealgorithmcanmakeaccurateandreal-timejudgmentfortrafficsituationsonroad,inaddition,thealgorithmissimpleandstable,andhasgoodpracticalvalue. TrafficsituationdetectionGrayscaledifferenceFramedifferenceMappingrelationshipbetweenpixelanddistance 2014-09-14。国家高技术研究发展计划课题(2012AA112312);西藏民族学院校内科研项目(14myY14);陕西省道路交通智能检测与装备工程技术研究中心开放基金(20120205110001)。宋俊芳,讲师,主研领域:计算机视觉,图像处理,智能交通。王卫星,教授。陈艳,硕士生。薛世焦,硕士生。宋焕生,教授。 TP391 ADOI:10.3969/j.issn.1000-386x.2016.03.046

4 测试结果与分析



5 结 语
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
现代电子技术(2021年1期)2021-01-17
中国交通信息化(2020年11期)2021-01-14
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年5期)2017-05-14
自动化学报(2017年11期)2017-04-04
光学精密工程(2016年1期)2016-11-07