独轮电动车非载人条件下的平衡加速运行可行性研究
2016-10-21 17:00孙宽慰潘翔阮翠霞刘妮
科技创新与应用 2016年7期
孙宽慰 潘翔 阮翠霞 刘妮

摘 要:独轮自平衡电动车是一种新型、环保、便捷的代步工具。为探讨非载人条件下小车加速减速自平衡运动规律,搭建承载重物而非载人的实验系统,并针对系统结构建立了物体—车一体化系统的动力学模型,通过系统实际运行过程中的加速运动实验获取了相关数据,并结合动力学模型的计算分析了独轮车载物运行中可实现平衡的特点,为实现独轮车无人驾驶提供依据。
关键词:独轮电动车;自平衡;动力学建模;加速运动
引言
自平衡独轮电动车为一种新型、环保、便捷的代步工具,它在运行过程中的纵向平衡问题与两轮自平衡机器人原理相同,通常在载人条件下人—车恰好组成的是一个可以移动的一级倒立摆系统,该系统为高阶次、不稳定、多变量、非线性、强耦合系统,其动力学系统非常复杂,属于欠驱动系统。在车轮转动的方向在静止状态下不能维持平衡,必须通过车轮的运动调节才能实现平衡,这种电动车系统为动态平衡系统。
独轮车系统在俯仰方向上,通过电机驱动力和人的自身平衡调节作用使车体补偿角度,以实现车体的平衡和行进。独轮车前后运动是靠人体重心的前后偏移来控制的。在文献[1]、[2]、[3] 中都有叙述到轮式自平衡技术的控制方法,这些方法都是从系统电路设计,电机驱动控制模式加以分析与论述的。然而,就无人条件下单纯载物来实现自平衡独轮电动车的运行尚无文献报道,当然,仅就技术实现来看可采用遥控方式加以解决,其中的问题是控制对象的选择,若单纯从电路控制实现电机的加、减速驱动仅仅是拒绝了单纯的运动问题,而整个系统的平衡问题无法解决;因此,针对这类问题只能通过对车体载物的物件重心的移动实现加、减速的方法才能保证小车系统的自平衡。
本研究利用独轮电动车固有的系统,设计并搭建无人条件下单纯载物的实验系统,结合实际运行试验研究独轮电动车的运动规律,探索该类小车无人条件下可实现自平衡运动的可行性。
1 实验系统设计
独轮电动车的运动平衡控制是系统的核心问题。在实际使用中,当载人运行时,是由人双脚站立在独轮车两侧踏板上,通过人体的前后俯仰保持独轮车的平衡与前行运动。若建立一个坐标系,小车前行方向为X方向,小车轮轴的左右翼方向为Y方向,小车垂直的俯仰方向则为Z方向;一旦将小车左右摇摆加以约束,使得小车仅能相对进行前后摇摆,这样,当在非载人条件下,从原理上讲,将小车上的重物实施中心的前后移动,便依旧可让载着物体小车实现加速或减速移動。在此指导思想下,设计搭建一套可实现载物独轮小车加减速的实验系统,其实验系统构架如图1所示。
本框架总体尺寸为:长500mm ,宽300mm,高1000mm;载物部位高度:1000mm;载物重量:20kg。
1.1 重心前后移动调节系统
以独轮车踏板为加载支撑点,在其上安装框架式结构,在整体结构的上半部位安装一个平衡杆,其上安装有一个可移动的滑块,滑块上有一载物台,实验用重物安放在在舞台上,通过滑块前后的位置调整,来获得车载重物重心的前后偏移,以此改变独轮车行进时整体的前后倾角,实现模拟人体加速时的不同姿态,从而在保证小车平衡的状态下获取运行小车的加速与减速。
一般情况下,人体的前后俯仰会决定加、速与减速的快慢,也就是加速度的大小,同样道理,将车载重物的重心相对车体垂直位置偏移多少也会获取大小不等的加速度,初步判断载物的偏移量与加速度大小成正比。
本系统仅仅考虑载物小车在直线行进时,即X-Z平面上的加速减速的平衡问题,因此针对由于小车左右摇摆,即Y-Z平面上的不稳定性采用辅助支撑轮实施了约束,使得问题讨论的条件简化。
1.2 姿态检测系统关键元器件选择
就研究目的而言,是为了探索在无人操作的情况下,如何实现载物小车的加、减速的平衡运行,另外在针对现有的整车控制系统不实施改造与开发的情况下,如何使系统满足要求从而获取相关数据,则是该实验系统索要解决的首要问题。据此,从衡量载物小车实现平衡运行时的速度、加速度及时间等几方面加以考量。其中,主要实施的是姿态检测,加速时段检测以及静止到加速完成的时间长短检测。
姿态检测系统选用加速度计MPU6050芯片。芯片内部集成了姿态解算器, 配合动态卡尔曼滤波算法,能够在动态环境下准确输出模块的当前姿态,姿态测量精度 0.01 度,稳定性很高。
量程:加速度:±16g,角速度:±2000°/s。
分辨率:加速度:6.1e-5g,角速度:7.6e-3°/s。
2 驱动原理与力学模型
2.1 一般假设条件
由于独轮车自身系统的复杂和人参与驾驶过程比较复杂, 很难建立准确的模型, 需要在允许的范围内忽略摩擦、弹性等因素,进行合理化的假设,以建立满足要求的近似模型。假设条件如下:(1)仅考虑X-Z平面内的平衡,将Y-Z平面的摆动实施了约束,系统为直线运动;(2)驾驶过程中车架与人始终运动一致,将车架与负载(人)视为一体,且与车轮均视为刚体;(3)独轮车车轮与地面始终保持接触,且运行时车轮与地面间无滑动;(4)忽略摩擦阻力偶矩,只考虑摩擦力与摩擦力矩;(5)忽略运行过程中空气阻力的影响。
2.2 驱动原理与力学模型
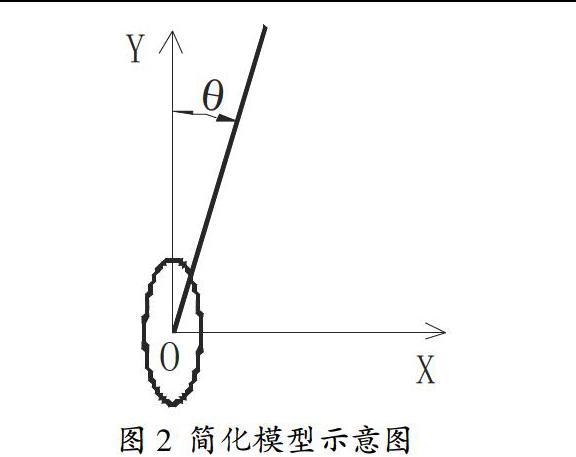
当采用人来驾驶独轮电动车时,系统可分为三个部分:车轮、车身(车架和车座)和人体躯干。如假设中所述,人在驾驶过程中与车身始终运动一致,故可简化为一体,其质量和用m表示。此时系统可视为一个以驾驶者身高l为杆长、以轮毂电机为底轮的倒立摆系统,图2为简化后的模型示意图。
我们定义以车轮轴心O为坐标系原点,在平行于独轮车侧面建立二维平面坐标系,独轮车前后俯仰方向为X轴,重力反方向为Z轴。图2中加黑部分为简化后的倒立摆系统。角度θ 为倒立摆系统偏移角。
在驾驶过程中,人体在前后方向偏移一定角度后,向下产生一个有重力作用与重心的扭矩M0。独轮车姿态测量模块测得倾角θ,反馈给控制单元,控制单元分析后控制电机产生同方向的驱动力F,使独轮车产生向前加速度a,同时驱动力作用于独轮车重心产生力矩M1,与力矩M0平衡。即
M1=-M0 (1)
力矩平衡,即可保持独轮车的整体平衡,并向前产生加速度,驱动独轮车前进。
独轮車与人体系统简化后的力学模型,如图3所示。
由图3分析,系统受到重力G作用于系统重心B,地面支持力F作用于车轮中心。
由系统平衡分析
|F|=|G|(2)
二力作用点不在同一点,产生一对力偶M0,方向为顺时针。
根据2.2分析
|M0|=|M1| (3)
重力mg|M0|=mg×|AB| (4)
驱动力Ff作用于点O,产生对系统重心B的力矩M1,方向为逆时针。
|M1|=|Ff|×|OA| (5)
由(3)(4)(5)可得
mg×|AB|=|Ff|×|OA| (6)
tan(?兹) (7)
驱动力产生加速度a
a= (8)
由(6)(7)(8)化简得
a=gtan(?兹) (9)
式(9)即为加速度与倾斜角的关系式。
由此可见,独轮车的加速度大小是由倾斜角决定的,故人体可以控制车身的倾斜角度控制独轮车的加速度。
3 实验与分析
通过建立力学模型和驱动原理分析,得到了加速度与倾斜角的定量关系。在实验过程中,将采用搭建的实验系统对独轮车的运动规律进行实验,验证上述关系。
通过调节实验系统上的滑块的位置,来改变独轮车的倾斜角度。在实验过程中,按倾斜角的不同,分为三组实验。
3.1 实验过程
姿态检测系统所测物理量有ax、ay、az 、wx、wy、wz、AngleX、AngleY、AngleZ。其中,本实验需要的数据列为红色的ay列和AngleX列。
加速度a对应表中ay列,倾斜角θ对应表中AngleX列。
第一组,如表1所示。
第二组,如表2所示。
第三组,如表3所示。
3.2 实验数据处理与分析
假设关系式
a=gtan(?兹)
等价于 (10)
将a=ay,θ=AngleX代入式(10)得
1= (11)
将实验测得的每组数据代入k=(其中k为比例系数),得到三组比例系数k1,k2,k3。通过比较比例系数k值是否接近为“1”,可以验证假设关系式的正确性。
第一组,如图4所示。
第二组,如图5所示。
第三组,如图6所示。
三组各自平均值如下:
K1=0.996,K2=1.033,K3=1.069。
有三组k值的曲线与平均值可得
k≈1
即关系式k=■=1成立,所以1=■成立。
3.3 结论
从以上三组实验可知由此可知,独轮自平衡电动车前后加速度与倾斜角关系为a=gtan(?兹),故独轮自平衡电动车前后运动加速度随独轮车倾斜角变化而变化。
4 结束语
文章设计并搭建了独轮自平衡电动车实验系统,根据人驾驶独轮自平衡电动车的际情况,建立了人与独轮车一体的系统物理模型。分析探讨了独轮车运动的加速规律,得到结论。然后通过物理实验,用数据证明的结论的正确性。但文章分析的独轮车系统与实验系统比较简单,在更加复杂的独轮车自平衡控制方面有待进一步研究。
参考文献
[1]李欣源,阮晓钢,任红格.柔性双轮平衡机器人的动力学建模与分析[J].机器人,2010,32(1):138-144.
[2]屠运武,徐俊艳,等.自平衡控制系统的建模与仿真[J].系统仿真学报,2004,16(4):839-841.
[3]蒙祖祈,刘海刚,项华珍,等.小型两轮自平衡电动车系统的设计与研究[J].工业控制计算机,2015(3).
指导老师:王晓林。