基于多模态PID的曳引机驱动控制系统设计
2016-10-28 03:14樊卫华曹建新
计算机测量与控制 2016年7期
谭 鹏, 樊卫华, 张 杰, 郑 鑫, 曹建新
(1.南京理工大学 自动化学院, 南京 210094; 2.江苏通用电梯有限公司, 江苏 扬州 225000)
基于多模态PID的曳引机驱动控制系统设计
谭 鹏1, 樊卫华1, 张 杰1, 郑 鑫2, 曹建新2
(1.南京理工大学 自动化学院, 南京 210094; 2.江苏通用电梯有限公司, 江苏 扬州 225000)
曳引机的驱动控制系统是垂直升降电梯的关键设备,对电梯性能具有重要影响,具有较大的研究价值;对一种基于多模态PID控制的永磁同步曳引机电梯驱动控制系统进行了研究;给出了曳引机驱动控制系统的总体设计方案,将系统分为主控模块、驱动模块和信号采集模块进行设计并介绍了各模块硬件电路的设计;针对曳引机控制采用了电流、速度双闭环控制算法,给出了主控制器DSP的软件流程设计,并对速度环采用的多模态PID控制算法进行了研究;在电梯公司的试验塔对设计的驱动控制系统进行现场调试,调试结果表明电梯在高、中、低速下都能够良好地跟踪给定的S型速度曲线,且超调量较小,稳态误差较小,可以满足电梯控制的性能指标要求。
电梯; 驱动控制;FPGA; 多模态PID
0 引言
随着我国经济持续增长、城镇化建设的加速和房地产行业的进一步发展,城市里的高层建筑逐渐增多,电梯市场需求量也得到迅速增长。电梯在许多新型高层居民小区中也逐渐普及,已经成为我国人们日常生活中必不可少的一部分[1]。
电梯技术起源于美国人奥的斯创办的公司,经过一个多世纪的发展,国外的电梯行业不论是技术还是资金都比较成熟。从最早的双速电梯到后来的交流调速电梯以及VVVF电梯,都是最初在国外提出的技术。相对来说,我国的电梯行业起步晚、起点低,很多电梯方面的先进技术还处于研发阶段[2]。电梯的核心技术是驱动控制技术,目前这方面的主要技术和成果基本都被国外公司所掌握,并受到其专利保护。因此,研究具有自主知识产权的电梯驱动控制系统及其技术有助于增强国内电梯的核心竞争力和市场竞争力。
本文主要研究了基于永磁同步曳引机的电梯驱动与控制系统,将多模态PID控制算法应用于基于DSP+FPGA为核心的驱动控制系统硬件平台,实验结果表明了该技术方案的可行性。本文内容安排如下:第二章介绍系统总体设计方案;第三章介绍硬件电路设计;第四章给出了软件流程及控制算法;第五章给出了实际系统调试结果;最后总结了本文工作。
1 总体设计方案
本文研究的驱动控制系统以电梯用永磁同步曳引机为对象,实现曳引机的电流与速度的闭环控制,以及对电梯外围信号的采集与处理。系统总体结构如图1所示,按照不同功能可分为三个模块。
主控模块:主要由DSP最小系统、FPGA最小系统、光电隔离电路、继电器输出与通信电路模块组成;是驱动控制系统的核心模块,负责处理与分析有其他模块反馈和采集的信息,完成曳引机的电流与速度闭环控制,以及对系统的状态检测与故障处理。
驱动模块:主要由整流模块、逆变模块组成,将市电网的三相交流电整流为直流电,并在主控模块的控制下将直流电逆变成幅值和频率可控的三相交流电,驱动曳引机旋转。
信号采集模块:主要由信号采集与调理电路、编码器信号采集电路组成,采集电流与速度闭环控制所需要的各种反馈信号,并调理成主控模块能够处理的电信号。
2 硬件电路设计
2.1 主控模块
为满足曳引机控制需要,主控模块必须具备大量的外围接口与通信接口,因此主控模块采用如图1所示的DSP+FPGA的主从CPU配置,利用FPGA扩展接口,完成楼层、外招等信号的分析与决策,主DSP芯片选用TI公司的TMS320F28335,完成电流、电压和速度信号的采样与滤波、控制计算、6路PWM信号生成等。此外,FPGA还完成系统状态的实时检测和连锁保护功能,通过实时监控驱动控制系统的状态信号,在发生故障时控制安全继电器,切断主控制回路,保证系统的安全。
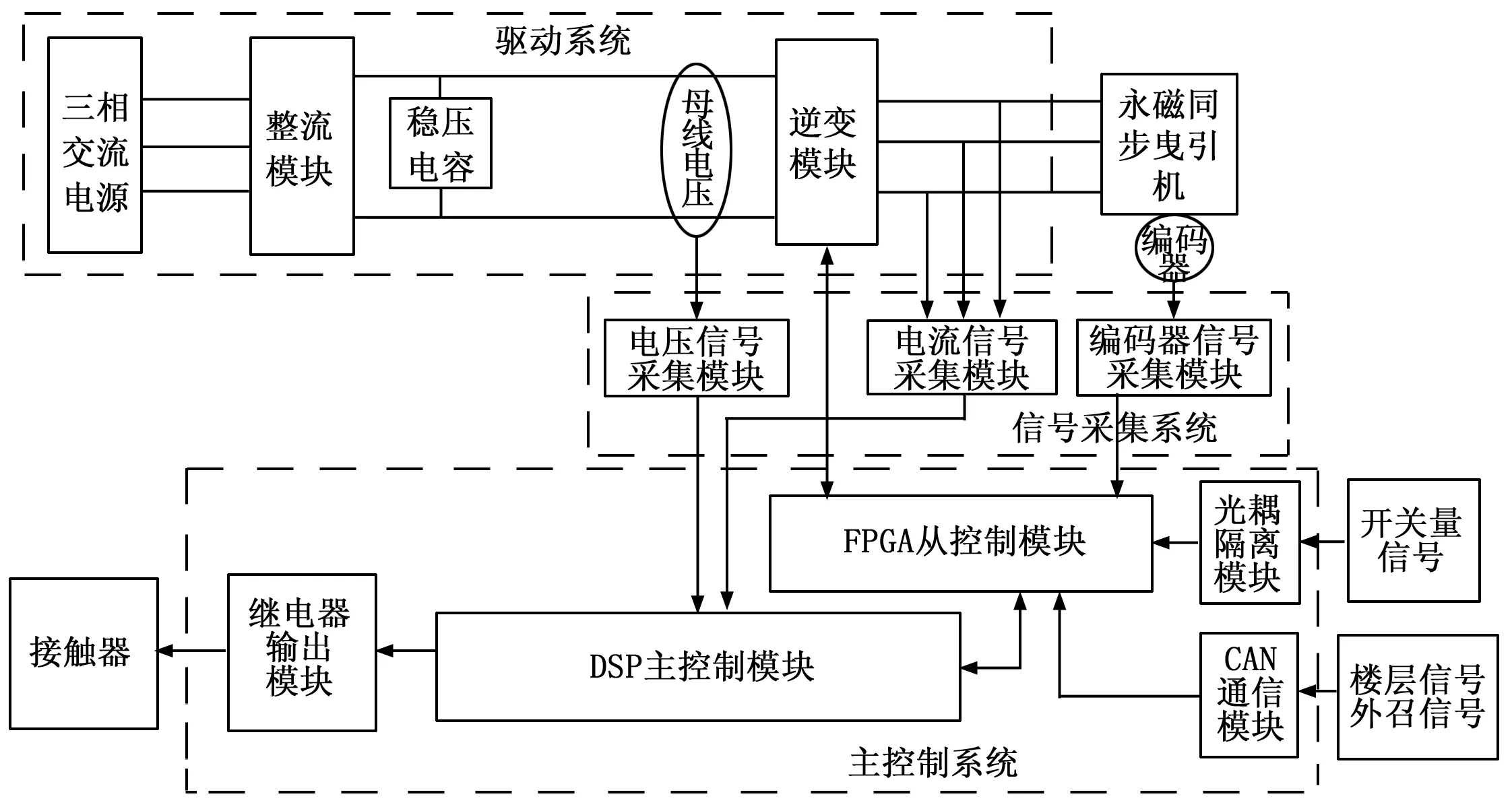
图1 总体设计结构图
DSP与FPGA的最小系统电路均采用了成熟的电路,限于篇幅不再给出。本节主要介绍光电隔离、通信、继电器控制电路。
在电梯运行过程中,为保障电梯安全运行及乘客的安全乘坐,需要检测一系列的信号,包括平层、限位等,这些信号大多为开关量,电压幅值为24 V。而主从CPU的管脚兼容的是3.3 V CMOS电平,必须对这些开关量信号进行调理。进一步考虑系统电磁兼容性要求,本系统采用如图2所示的光电隔离电路实现此功能。
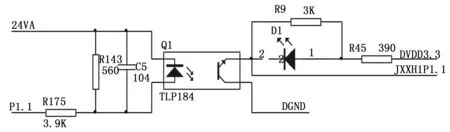
图2 光电隔离电路原理图
为能使电梯正常运行,主控模块必须对抱闸接触器、电源接触器等外围电气设备进行有效控制,此类设备的控制信号一般为110 V开关量。故本系统采用如图3所示的继电器电路实现,主控模块输出控制信号经过达林顿管增强电流驱动能力后,控制继电器完成输出控制。
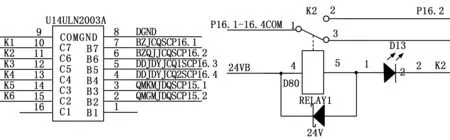
图3 继电器输出电路原理图
曳引机需要跟踪速度曲线,保证轿厢平稳上下,而速度曲线根据楼层信号和外招信号,通过计算生成。本系统中,主控模块通过CAN总线接口连接轿厢板和外招板获取楼层信号和外招信号。CAN总线接口电路如图4所示,利用DSP自带CAN接口进行扩展,选用SN65HVD230作为CAN总线收发器,用拨码开关控制的终端电阻。
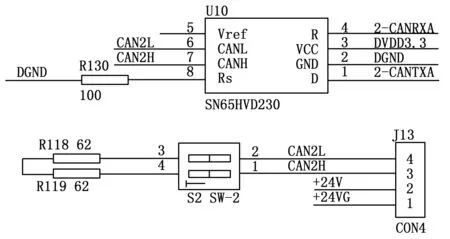
图4 CAN总线接口电路原理图
2.2 驱动模块设计
本系统的驱动模块采用经典的交-直-交模式,整流电路将三相市电转化为直流母线电,主控模块输出PWM波控制智能功率模块(IPM)内部的逆变电路,将直流电逆变为幅值和频率可调的三相电,控制曳引机运行。
为简化电路设计,整流电路采用集成的三相整流桥式模块,如图5所示。其中R1、R2、R3为压敏电阻,用来吸收电压变化产生的多余电流,保护整流器件。C5、C6为稳压电容,C7为无感电容,用来吸收母线上的杂散电感产生的浪涌电压。
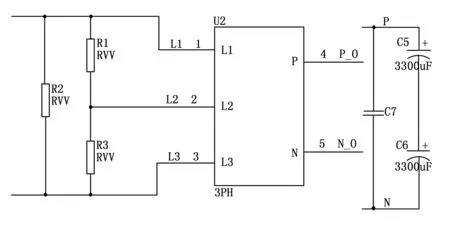
图5 整流电路原理图
逆变电路采用智能功率模块(IPM)。IPM将功率模块器件与驱动电路集成到了一起,并且内部集成了故障检测电路和保护电路,具有很高的集成度、可靠性与稳定性。为提高系统可靠性和电磁兼容性,主控模块的6路PWM信号和IPM的故障信号都经过光耦隔离处理,其中PWM信号频率较高,选用高速光耦HCPL-4504,而故障信号选用低速光耦TLP521,IPM接口电路如图6所示。
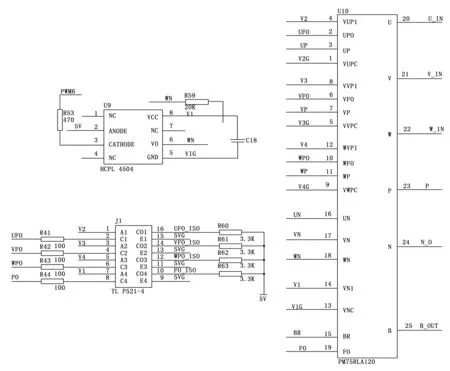
图6 IPM接口电路原理图
2.3 信号采集模块设计
为实现曳引机的电流、速度的闭环控制,检测电梯系统的运行状态,需实时采集三相电流、直流母线电压、曳引机速度等多种数据,信号采集模块由上述信号的采集电路组成,基本分为编码器、电流、电压采集三个子模块。
首先介绍针对增量式编码器的采集电路。增量式编码器A相、B相、C相、D相和R相五路差分形式的编码信号,其中A相和B相包含了转速信息,转动一圈输出2048个正弦信号,A相和B相的相位关系表征了转动方向。R相为归零信号,曳引机转动一圈输出一个脉冲。C相和D相包含了曳引机转动轴的机械角度,在曳引机转动一圈时输出一个完整的正弦波信号,C相超前D相90°。
由于差分信号不能直接输入主控模块,需首先将其转化成单端正弦信号,然后利用A相、B相和R相信号,得到DSP的QEP模块可以处理的方波信号。上述过程,本系统利用去差分电路和比较电路实现,如图7所示。
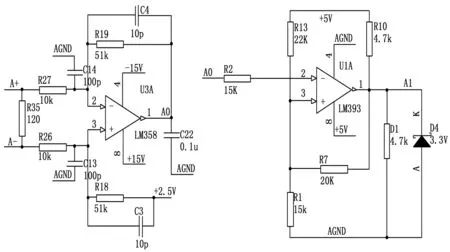
图7 去差分电路和比较电路原理图
三相电流、母线电压等信号是电流环控制所需关键数据,其精度和实时性对控制效果有决定性的影响。本系统选用具有良好的线性度与温度稳定性的霍尔传感器作为传感器,配合信号调理电路,将电流/电压信息转换成0~3 V之间能被DSP AD接口读取的电信号。电路结构示意图如图8所示,具体电路图不再给出。

图8 信号调理示意图
3 软件流程及控制算法
3.1 系统软件流程
本系统软件指DSP内部的软件,采用模块化的设计思想,由中断子程序实现对曳引机的电流、速度双闭环控制。主程序则首先完成系统初始化,然后判断是否有召唤信号,若有则计算速度曲线,生成速度指令,否则继续等待召唤信号。主程序流程图如图9所示。
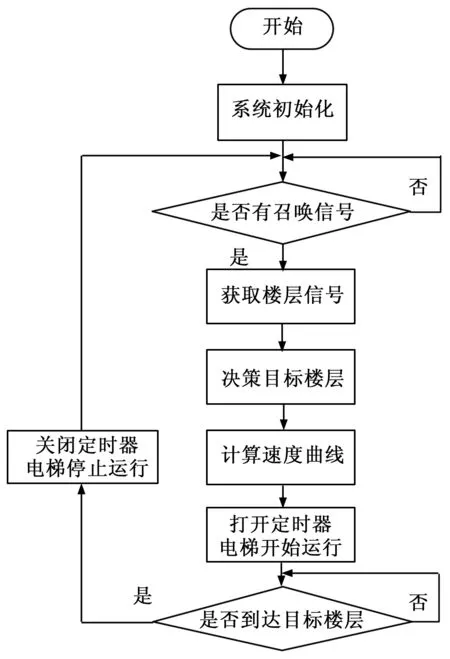
图9 主程序流程图
系统的软件中断主要包括电流环中断和速度环中断。电流环中断由DSP的定时器1中断实现,中断周期设为0.1 ms,采用目前比较成熟的矢量控制算法实现对曳引机三相电流的控制;速度环中断采用“假中断”的方式,以电流环控制周期为基准,每过100个电流环周期执行一次速度环中断,即每10 ms执行一次。根据主程序计算的速度值,依据多模态PID控制算法给出控制量,实现对曳引机转速的控制。中断子程序流程图如图10所示。

图10 中断子程序流程图
3.2 多模态PID控制算法
速度控制算法是影响运行平稳性的关键之一,电梯曳引机跟踪S型速度曲线,该曲线中隐含了加速度、加加速度的变化,因此要求控制算法必须兼顾动态性能和稳态性能的要求,具有较大的难度。
本系统采用多模态PID控制算法,该算法将传统PID控制与智能、切换控制思想相结合,克服了传统PID控制算法的不足,同时又具有了智能控制算法的优点,具有算法计算量小、鲁棒性好、调试简单等特点。具体思想是:根据系统误差的大小将系统分成若干个工作模态,在不同的模态,按照系统运动特性和指标要求,施加不同的PID控制,实现控制作用的按需实施,从而达到满意的控制效果。本系统以曳引机速度误差为依据,划分了7个工作模态,如表1所示。
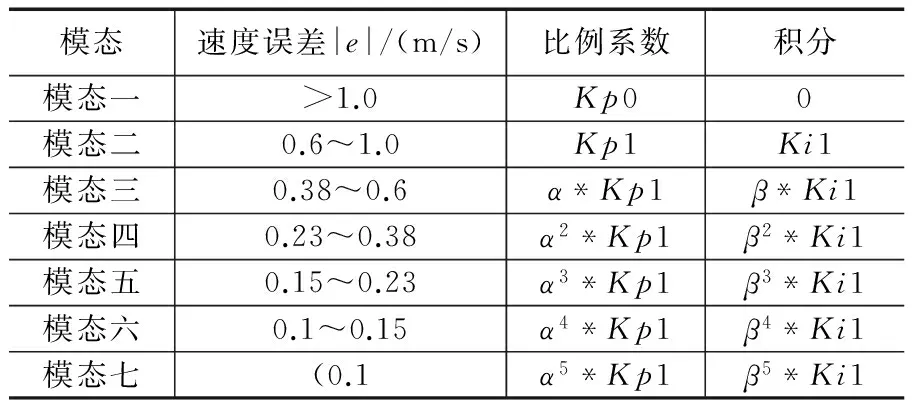
表1 多模态PID控制参数
其中,Kp0为模态一的比例系数,Kp1、Ki1分别为模态二的比例系数和积分初值,其他模态按比例控制比例系数和积分初值,α,β分别为比例和积分控制变化系数。上述参数需要调试确定。
控制算法程序通过式(1)计算控制量,然后经过必要的限幅等处理后输出。


(1)
4 实验结果与分析
本驱动控制系统已经在公司的电梯试验塔进行了较为全面的测试。局限于篇幅,本文给出电梯负载为满载的50%,以时间为原则运行单层、两层和三层楼时,上位机记录的电梯S型运行速度曲线。如图11、图12、图13所示,图中红线为速度给定值,绿线为实际测得的速度值。
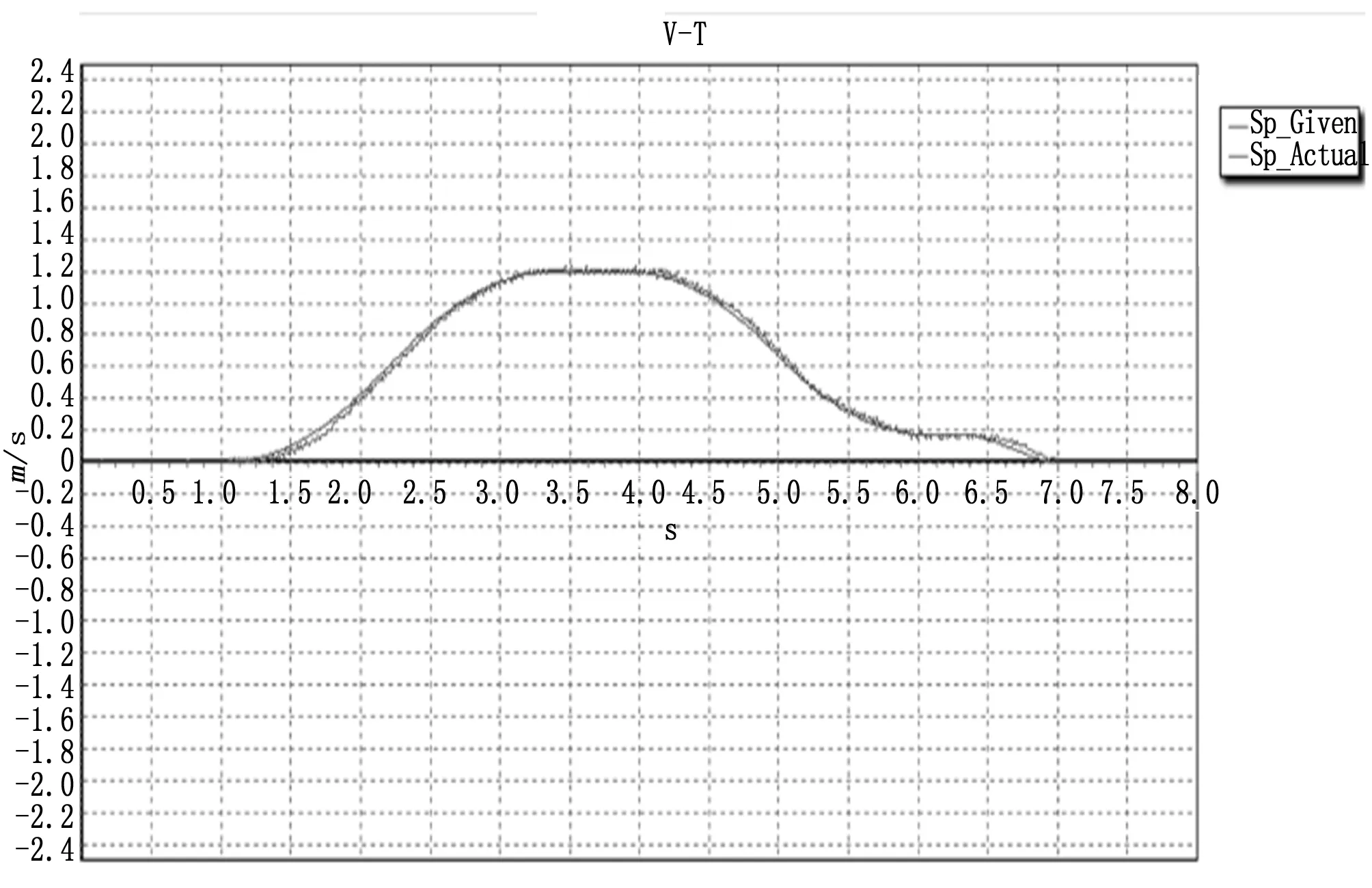
图11 单层速度曲线
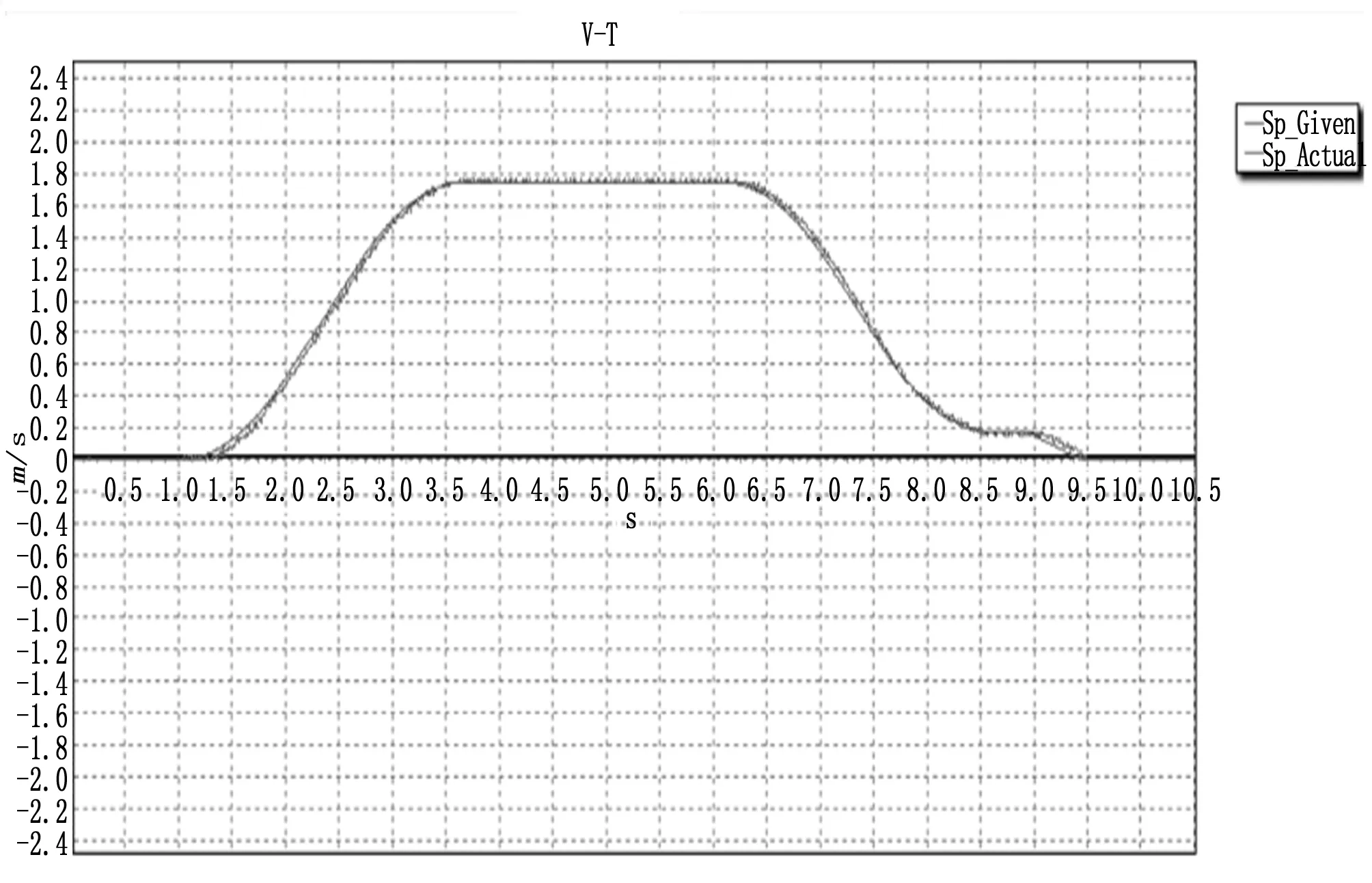
图12 两层速度曲线

图13 三层速度曲线
电梯3种情况下运行的速度最高值分别为1.2 m/s、1.75 m/s和2 m/s,分别对应设定的低、中、高三条速度曲线。可以看出电梯在匀速运行时控制精度较高,稳态误差小,在制动减速段和最终平层段运行时,出现了速度跟踪之后,实际运行曲线和给定曲线有一定偏差,这是电梯的机械惯性造成的。
3种情况下电梯均有一段爬行过程,这是由于以时间为原则控制电梯运行速度时,主控制器不能得到准确的轿厢位置,为准确平层需要一段爬行运行过程。从3条曲线的对比看,单层速度曲线爬行段最长,两层速度曲线次之,三层速度曲线最短,表明电梯在高速运行时控制精度较低速运行时高。
从整体的运行过程来看,本文所设计的控制系统能够控制电梯在1.3 m/s、1.75 m/s和2 m/s下以较高精度跟踪给定速度曲线,且超调量较小,稳态误差小,基本达到设计要求。后期对PID控制参数进一步调整,并采用更高效控制算法,可以达到更好的控制效果。
5 结论与展望
本文围绕永磁同步曳引机驱动控制系统设计,介绍了系统硬件电路的设计、系统软件流程,并分析研究了多模态PID控制算法的思路及其实现,并利用电梯实验数据验证了方法的可行性和性能。
下一步的研究工作将围绕提高控制算法的适应性,降低调试难度等方面展开。
[1] 梁秀璟. 中国电梯:高速发展下的思考[J]. 自动化博览, 2012(12):48-48.
[2] 陈晓燕. 电梯控制与拖动技术及其发展趋势[J]. 机械研究与应用, 2011(3):12-15.
[3] 张汝成, 王广生, 张 磊.基于ARM的电梯主控制器设计[J]. 计算机测量与控制, 2009, 17(10):1958-1961.
[4] 甄志鹏. 电梯智能控制系统的分析与设计[D]. 广州:华南理工大学, 2013.
[5] 陆鑫森, 赵国军, 邢海潇,等. 电梯运行速度曲线的控制[J]. 轻工机械, 2010, 28(6):70-72.
[6] 刘晓峰. 无齿轮电梯用永磁同步电动机的研究[D]. 天津:天津大学,2009.
[7] 周 好. 永磁同步电机矢量控制调速系统研究[D]. 大连:大连理工大学, 2011.
[8] 刘 利. 基于嵌入式系统的电梯核心控制器的设计与实现[D]. 天津:天津大学,2007.
[9] 梅国权. 永磁同步电机矢量控制系统的研究与设计[D]. 南京:南京理工大学,2013.
Design of Drive and Control System for Traction Machine Based on Multi-mode PID
Tan Peng1, Fan Weihua1, Zhang Jie1Zheng Xin2, Cao Jianxin2
(1.School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China;2.Jiangsu General Elevator Limited Company, Yangzhou 225000, China)
The drive and control system of a traction machine is a critical part for a vertical elevator, which has great effects for elevator performance and thus is well worthy to be studied. A multi-mode PID method is introduced for permanent magnet synchronous traction machine control as well as the overall design scheme of the drive and control system. The system is divided into three parts, including main control module, drive module and signal acquisition module, all introduced in details of hardware circuit. Dual-loop control algorithm, speed loop and current loop, is employed for traction control and the corresponding flow diagram of DSP software is presented. Studies for multi-mode PID control algorithm in the speed loop is introduced. According to in-field debugging, the elevtor can precisely follow all given speed curves with small overshoot and steady-state error, and can well meet the requirements of elevator control.
elevator; drive and control; FPGA; multi-mode PID
2015-12-09;
2016-02-15。
江苏省重大科技成果转化项目(BA2015147)。
谭 鹏(1989-),男,山东烟台人,硕士研究生,主要从事嵌入式系统研究与设计方向的研究。
1671-4598(2016)07-0093-04
:10.16526/j.cnki.11-4762/tp
TP3 文献标识码:A
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
机械制造(2020年7期)2020-07-21
中国工程机械学报(2019年4期)2019-08-06
中国特种设备安全(2018年11期)2019-01-08
小学生学习指导(低年级)(2018年3期)2018-01-31
制造技术与机床(2017年6期)2018-01-19
小学生时代·综合版(2016年7期)2016-05-14
红蜻蜓·低年级(2015年11期)2016-02-02
电源技术(2015年9期)2015-06-05
小说月刊(2015年4期)2015-04-18