
双钢轮振动压路机柔性起步停车控制技术研究
2016-11-11 02:41张佩,王凯
新技术新工艺 2016年8期
双钢轮振动压路机柔性起步停车控制技术研究
压路机在作业过程中,会循环经历“前进—停止—后退”这一过程。前进时的起步加速及停车减速,后退时的起步加速及停车减速等,加之双钢轮振动压路机的质量较大,使得压路机的驱动系统受到频繁的载荷冲击,严重影响其作业质量[1-2]。针对上述问题,本文研究了柔性起步停车控制技术,有效地提高了压路机的作业质量。
1 双钢轮振动压路机行驶系统的控制方法研究
在控制方法研究过程中,根据控制器的工作原理以及功能要求的不同,设计相应的控制流程以及控制方法。
1.1 RC6-9控制器工作原理
本文所采用的RC6-9控制器的工作原理如图1所示,程序的刷新采用循环模式,每20 ms为1个循环周期。
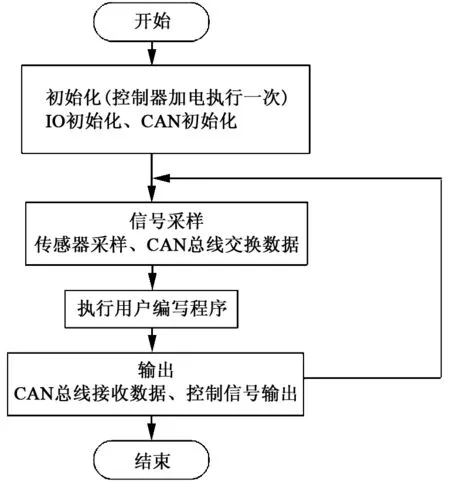
图1 RC6-9控制器工作原理示意图
1.2 行驶控制方法研究
1.2.1 行驶速度与方向控制
本文研究的样机,采用单变量泵控双马达的行驶液压系统,行驶方向控制是通过对变量泵流液方向的调节来实现,行驶速度控制是通过变量泵的排量来调节[3-5]。
当需要改变压路机的行驶方向及速度时,可以通过控制手柄给控制器发出相应的信号,控制行驶泵的电液比例阀来改变液压泵的流液方向及其排量大小,实现控制功能。在控制过程中,将手柄的电压值0.5~4.5 V线性换算成0%~100%,来表示手柄所处位置,其电压与手柄的位置曲线如图2所示。
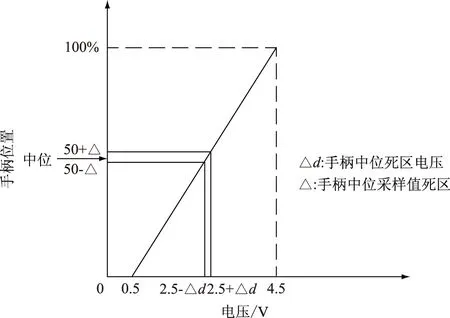
图2 电压与手柄位置曲线
本文研究的样机采用的是博世力士乐的A4CG变量泵,其行驶泵排量与电流关系曲线如图3所示,泵排量与电流关系式见表1,具体控制流程如图4所示。

图3 行驶泵排量与电流关系曲线
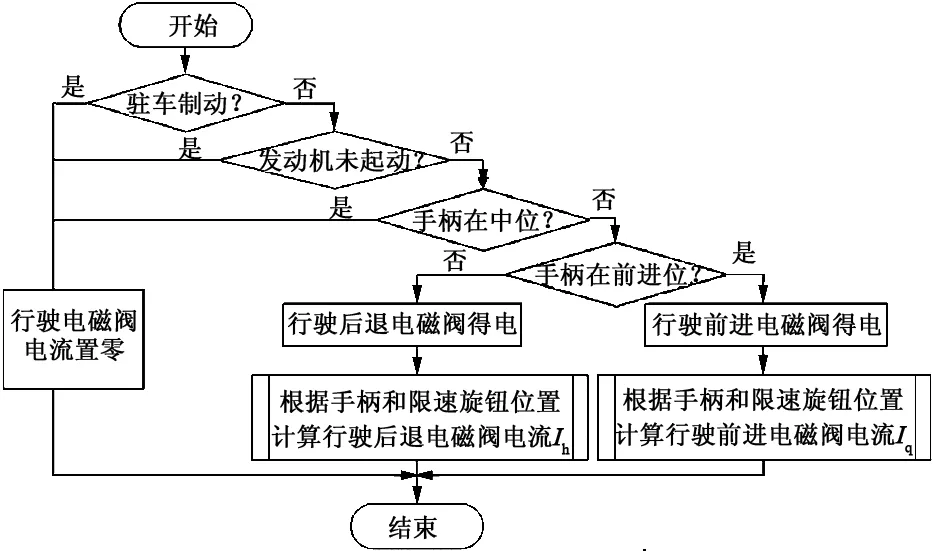
图4 行驶速度及方向控制流程

电压/V控制电流起点i0/mA控制电流终点iF/mA排量与电流关系式24200600Vg=[Vgmax×(i±200)]/400
1.2.2 柔性起步停车控制
为了合理控制压路机作业时频繁的起步加速度和停车减速度对其驱动系统的冲击,本文采用了柔性起步停车控制技术。该技术是一种基于PWM电流的斜坡控制技术,具体的控制方法是将控制手柄输入的电流值与控制器输出的电流值进行比较,根据二者之差增加或者减少步长,经过多个循环周期后,使输出的电流值逐步跟随至控制电流[6-7]。其控制的原理图如图5所示,具体控制流程如图6所示。
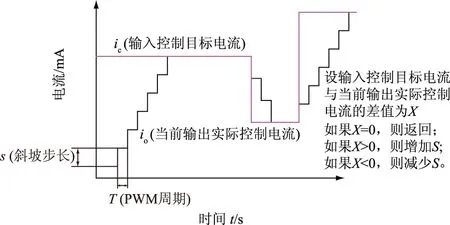
图5 柔性起步停车控制原理图
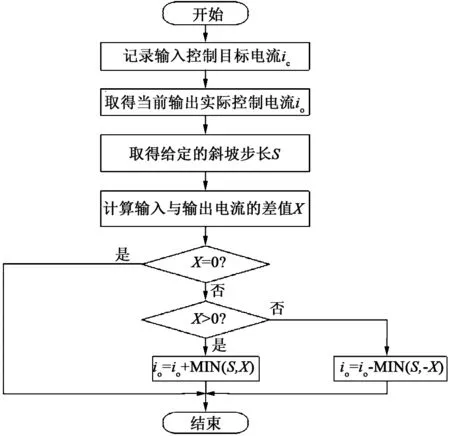
图6 柔性起步停车控制流程
2 双钢轮振动压路机的试验研究
2.1 试验目的
上机测试样机行驶系统的控制功能。
2.2 传感器布置
传感器布置图如图7所示。

图7 传感器布置图
2.3 试验内容及结果
2.3.1 起步加速试验
在高速挡前进起步加速过程中,发动机转速和行驶系统功率曲线如图8所示,样机加速度和行驶马达转速波动曲线如图9所示,发动机和行驶马达转速波动曲线如图10所示。在高速挡后退起步加速过程中,发动机转速和行驶系统功率曲线如图11所示,样机加速度和行驶马达转速波动曲线如图12所示,发动机和行驶马达转速波动曲线如图13所示。
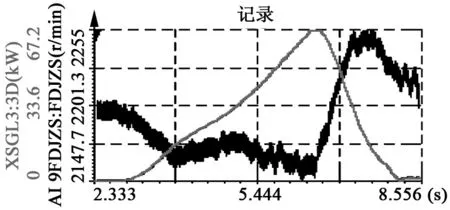
图8 高速挡前进起步加速过程发动机转速和
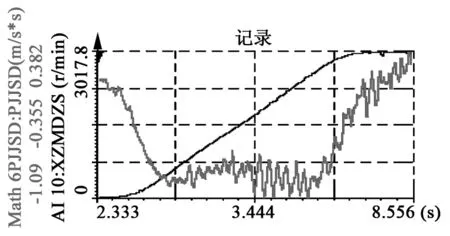
图9 高速挡前进起步加速过程样机加速度和
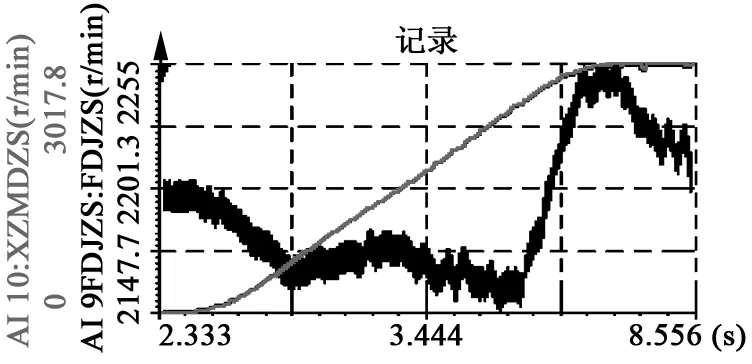
图10 高速挡前进起步加速过程发动机和
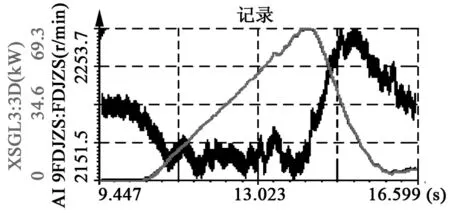
图11 高速挡后退起步加速过程发动机转速和

图12 高速挡后退起步加速过程样机加速度和
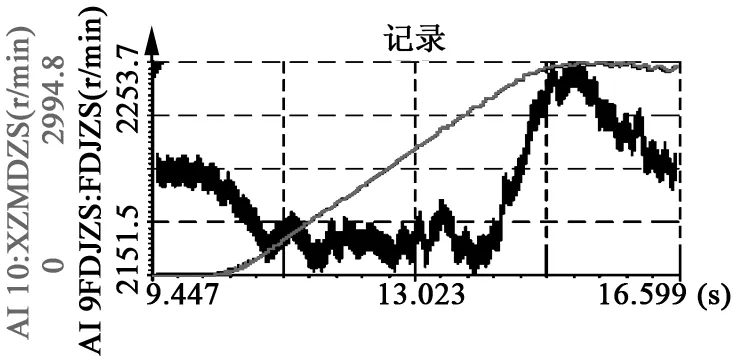
图13 高速挡后退起步加速过程发动机和
2.3.2 停车减速试验
在低速挡前进停车减速过程中,发动机转速和行驶系统功率曲线如图14所示,样机加速度和行驶马达转速波动曲线如图15所示,发动机和行驶马达转速波动曲线如图16所示。在低速挡后退停车减速过程中,发动机转速和行驶系统功率曲线如图17所示,样机加速度和行驶马达转速波动曲线如图18所示,发动机和行驶马达转速波动曲线如图19所示。

图14 低速挡前进停车减速过程发动机转速和

图15 低速挡前进停车减速过程样机加速度和
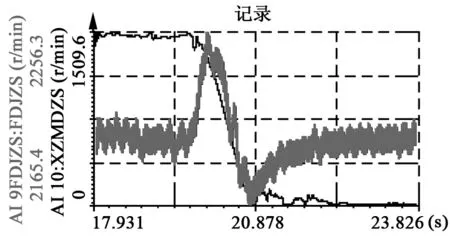
图16 低速挡前进停车减速过程发动机和
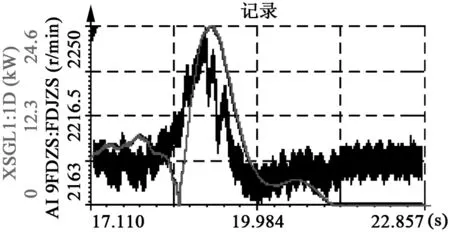
图17 低速挡后退停车减速过程发动机转速和
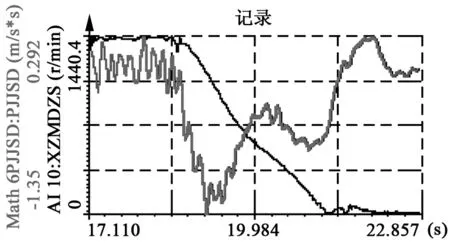
图18 低速挡后退停车减速过程样机加速度和

图19 低速挡后退停车减速过程发动机和
2.4 试验结论
1)在起步过程中,产生较小的最大加速度;同时,发动机转速下降≤50 r/min;在行驶作业过程中,液压系统的最高压力不超过设定压力;增量斜坡的步长设置合理。
2)在停车过程中,发动机反拖转速上升≤70 r/min;行驶系统的反拖峰值压力小于设定压力;减量斜坡的步长设置合理。
3 结语
本文对双钢轮振动压路机行驶控制系统进行了研究,主要结论如下:1)确定了样机行驶系统控制方案;2)提出了行驶速度与方向控制方法、柔性起步停车控制方法;3)对样机进行了试验研究,验证了控制方法的合理性。
[1] 焦生杰, 董强柱. 振动压路机市场及压实技术的发展[J]. 筑路机械与施工机械化, 2009(12):32-36.
[2] 黄宁波. 行走系统起步加速过程对双钢轮压路机的影响[J]. 建设机械技术与管理, 2010(4):94-95.
[3] 候劲茹, 冯忠绪, 杨璐, 等.基于ADAMS和ANSYS的振动压路机虚拟样机模型[J]. 广西大学学报, 2010, 35(6):972-977.
[4] 张佩. 14t全液压双钢轮振动压路机关键控制技术研究[D]. 西安: 长安大学,2012.
[5] 刘龙, 唐红彩, 沈建军. 双钢轮振动压路机行走液压系统仿真分析[J]. 建筑机械, 2009(13):62-67.
[6] 张晓静. 全液压双钢轮振动压路机反拖控制方法研究[D]. 西安: 长安大学, 2010.
[7] 顾林怡, 谢英俊, 王庆丰. 工程机械大惯性负载起制动平稳性的研究[J]. 工程机械, 2001(2):28-31.
责任编辑 郑练
张 佩1,王 凯2
(1.西安铁路职业技术学院,陕西 西安 710014;2.长安大学 道路施工技术与教育部重点实验室,陕西 西安 710064)
双钢轮振动压路机在作业时,会循环经历“前进—停止—后退”这一过程,导致起步过程出现功率叠加现象,以及经受较大的压力和冲击等问题。为了有效解决上述问题,提高压路机作业质量,在对压路机的工作原理和性能指标进行分析的基础上,开发了基于工程机械专用控制器RC6-9的压路机行驶控制系统,提出了柔性起步停车控制技术,并给出了其控制方法及流程,使行驶系统平稳起步。通过对控制系统功能和性能进行了现场试验研究,验证了柔性起步停车控制技术的可行性与合理性。
双钢轮振动压路机;柔性起步停车控制技术;RC6-9控制器
Study on the Flexible Starting and Stopping Control Technology of High Frequency Electric Tandem-drum Vibratory Roller
ZHANG Pei1, WANG Kai2
(1.Department of Mechanical and Electrical Engineering, Xi’an Railway Vocational & Technical Institute, Xi’an
710014, China; 2.Key Laboratory for Highway Construction Technology and Equipment of Ministry of Education,
Chang’an University, Xi’an 710064, China)
When the tandem-drum vibratory roller is in operation, it will cycle through the process of moving forward, stop and backward, which leads to the phenomenon of power overlapping in starting process and excessive impaction. In order to effectively solve the above problems, improve the quality of road roller, based on the working principles and property index of tandem-drum vibratory roller, while the driving control system is developed under the RC6-9 controller. The control algorithm and procedures of the technologies with respect to flexible starting control are developed and designed. By ways of field tests, the driving control system function is studied. The system function and performance of the machine is field tests studied. The results of simulation agree well with that of tests so the reasonability and credibility of the model is verified.
tandem-drum vibratory roller, flexible starting and stopping control technology, RC6-9 controller

张佩(1986-),女,助教,硕士研究生,主要从事机械、控制等方面的研究。
2016-04-13
TD 422
A
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
动漫界·幼教365(大班)(2021年4期)2021-05-23
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
建材发展导向(2019年13期)2019-08-24
电子制作(2019年7期)2019-04-25
中国棉花(2017年10期)2017-11-04
照明工程学报(2016年3期)2016-06-01
筑路机械与施工机械化(2015年11期)2015-07-01
筑路机械与施工机械化(2014年5期)2014-03-01
