
平台、捷联惯导系统维修保障专利差异分析
2016-11-16 07:46田静分孔立军焦梅素
河南科技 2016年14期
田静分 孔立军 焦梅素
(石家庄海山实业发展总公司,河北 石家庄 050208)
平台、捷联惯导系统维修保障专利差异分析
田静分 孔立军 焦梅素
(石家庄海山实业发展总公司,河北 石家庄 050208)
本文从惯性导航系统的结构、原理等方面比较了平台式惯导和捷联式惯导的异同。通过二者在实验环境、设备保障、定期标校等方面的分析,找出维修差异,为平台、捷联式惯导系统的维修保障提供参考。
平台式惯导;捷联式惯导;维修保障差异分析
与世界发达国家相比,惯性导航技术在我国起步较晚,经过几十年的研制,两大关键惯性元器件陀螺和加速度计从液浮式到挠性支撑,系统实现从平台式到捷联式,导航方式从纯惯性导航到与卫星组合导航。目前,我国投入使用的有平台式和捷联式两类惯性导航系统,中高精度的平台式惯导已经批量装机使用,低成本、中等精度的捷联式惯导已经批量生产并投入使用。
随着装备的陆续到寿,目前平台式惯导系统已经开始翻修,可以预见,捷联式惯导系统也将面临同样问题,因此有必要对其维修保障所需实验环境、测试设备、标校要求等与平台式惯导系统进行对比分析,进而做到有的放矢。
1 平台式惯性导航系统与捷联式惯性导航系统的异同
将陀螺仪和加速度计等惯性元件安装在一个机械稳定平台上,模拟当地地理坐标系是平台式惯导的显著特点,在平台内建立实际导航坐标系,并且与载体振动隔离,惯性敏感元件工作在稳定良好的环境中,导航计算量小,惯性元件的输出较易补偿和修正。但是其结构复杂,体积大,成本高,维修费用十分昂贵,可靠性较差。
捷联式惯导的最大特点是没有机械式陀螺稳定平台,将惯性敏感元件陀螺和加速度计直接固连到运载体上,它们的三个敏感轴分别相互垂直,组成机体坐标系。三个单自由度陀螺分别敏感载体角速度,计算机直接与陀螺输出的数字信息进行综合,经处理解算得到的姿态矩阵把机体坐标系变换到导航坐标系,然后进行导航参数计算。可见,捷联式惯导系统中已不再有实体的稳定平台,平台的作用已由计算机及其软件的作用代替,所以也称捷联式惯导系统采用的是“数学平台”。
2 两类惯性导航系统维修保障差异
通过捷联式惯导与平台式惯性导在结构、原理上的不同对比,可以从以下几个方面分析二者在维修保障时的不同需求:
2.1 实验环境
对于平台式惯导,平台用于模拟一个导航坐标系,把加速度计的测量轴稳定在导航坐标系,并用模拟的方法给出载体的姿态和方位信息。由于其物理稳定平台结构精密,为四环框架,平台要精确实时跟随地理坐标系,要求其环架结构转动均匀灵活,工程实现上对其装调环境有着严苛的要求,实验室洁净度不低于十万级,人员保证在全防护状态下才能对台体进行装调工作,否则过多的尘埃极易造成摩擦力矩大,进而影响台体性能指标;平台式惯导中,“挑剔”的台体通过减震器已经装在稳定、可靠的机箱中,故系统级实验只需在相对封闭、防静电的环境中即可。
对于捷联式惯导,其显著的特点即为与载体固连,其角速度敏感元件为全固态陀螺仪,台体装调环境要求较低,满足三十万级就可以正常工作;系统级实验也需在相对封闭、防静电的环境中,与平台式惯导相同。
2.2 设备保障
由加速度计和陀螺仪实现的功能可知,加速度计用来敏感加速度,陀螺仪用来敏感角速度,而达到惯性级仪表要求的加速度计随机零位偏差应优于10-4g(1g=9.8 m/s2),陀螺仪的随机漂移率应优于0.01°/h,这样二者在惯性导航系统规定的初始对准时间内才能精准找到当地水平面和测出当地地球自转角速度分量,故在实验室中要把两大惯性器件的性能进行精确测定就要将外界振动干扰进行专门隔离,这就需要创建稳定基础,通常是在实验室进行基础建设刚开始就要将地基留好。当然,无论是捷联式惯导还是平台式惯导对此要求都是一致的。
由于纯惯性导航参数短时间内精度较高,但误差随时间快速积累而导致系统精度迅速降低,长时间工作后便无法满足导航精度要求,实时用卫星信息对惯导进行校正形成组合导航系统,可以很好的解决这个问题,为此实验室需要卫星转发器、信号传输电缆及发射天线。在这方面,平台式与捷联式惯导需求也是一致的。
惯导系统调试完成后需要多维度的实验,全面模拟外场复杂的使用环境,以此验证系统的性能及功能。在北向基准转台上通过与转台基准比较航向角、姿态角的输出,验证系统的航向、姿态精度,实验室需要北向基准的建立;双轴自动转台实现常温下的静止导航实验,验证系统的位置精度、速度精度;振动台和高低温箱验证系统在恶劣环境下的导航精度;工程实验车验证系统在动态环境下的导航精度,接口及功能测试设备验证系统对外交联信号输入输出的正确性。惯导系统固然都需这些设备,但是因为两类惯导在硬件连接、测试软件等方面的巨大差异,设备通用性不强。
由于平台式惯导是在恒定温度下工作,系统内部自设温控回路,结合调试方法可以知道系统级实验需要配置通风冷却装置;而捷联式惯导的启动工作对温度没有要求,无论在外场使用环境还是内场实验室都不需通风冷却装置,但因其调试阶段需要对陀螺和加速度计进行全温度范围内相关参数的测试及补偿,也就是温度标定,所以带温度控制的转台(简称温控转台)需要配置。
为保证平台式惯导的稳定平台与捷联式惯导的激光陀螺工作在适宜的环境,二者都需要密封充气装置,又由于两种台体在结构组成上的巨大差异,使得该设备不可通用。
此外,平台式惯导系统内部的陀螺仪、加速度计均为挠性支撑,挠性头比头发丝还要细,在非工作状态十分脆弱,极易损坏,捷联式惯导的加速度计也是如此,因此无论是惯性敏感元件还是台体组件或者惯性导航系统,在转工运输过程中都要放到专门的减震周转箱,防止磕碰损伤。
2.3 定期标校
前面提到,惯性导航系统的误差会随着时间而累积,两大关键惯性器件陀螺和加速度计的性能指标也会发生变化,标校就是对惯性导航部系统基本参数的标定和校准,使之满足使用要求。平台式惯导的台体零部件维修更换因为在要求苛刻的环境中实现,故外场标校需要环境、设备齐全的工程车,而捷联式惯导的惯性敏感元件直接与载体固连,故其相关参数的全面标定需要在设施齐全的实验室环境中才能进行,配有采集软件的笔记本在外场环境下只可实现基本参数的简单标校。
3 结语
本文针对已经开始翻修的平台式惯导和即将进入翻修期的捷联式惯导从结构、原理方面进行了比较,重点在维修保障涉及的实验环境、设备保障、定期标校等几个方面进行详细阐述对比,得出平台式惯导与捷联式惯导的实验室基础建设及卫星信号转发需求一致,环境要求、设备保障需求不尽相同的结论。应注意的是装备实际维修保障时要根据维修级别、维修深度进行相应的实验室建设。
[1]李跃,邱致和.导航与定位[M].北京:国防工业出版社,2008.
[2]于波,陈云相,郭秀中.惯性技术[M].北京:北京航空航天大学出版社,1994.
[3]李晓峰.捷联惯导和组合导航的仿真研究[D].西安:西安电子科技大学,2010.
Difference Analysis of Maintenance Support Patent in Plantform Inertial Navigation System and Strap-down Inertial Aavigation System
Tian JingfenKong LijunJiao Meisu
(Shijiazhuang Haishan Industrial Development Corporation,Shijiazhuang Hebei 020208)
Based on the structure and principle of the inertial navigation system,the similarities and differences between the platform inertial navigation system and the strapdown inertial navigation system are compared.Through the analysis of the two aspects in the experimental environment,equipment support,regular calibration and so on,to find out the maintenance differences,to provide reference for the maintenance of the platform and the strap down inertial navigation system.
plantform inertial navigation;strap-down inertial navigation;difference of maintenance support

2016年河南省各省辖市及直管县(市)专利申清量统计表(7月)
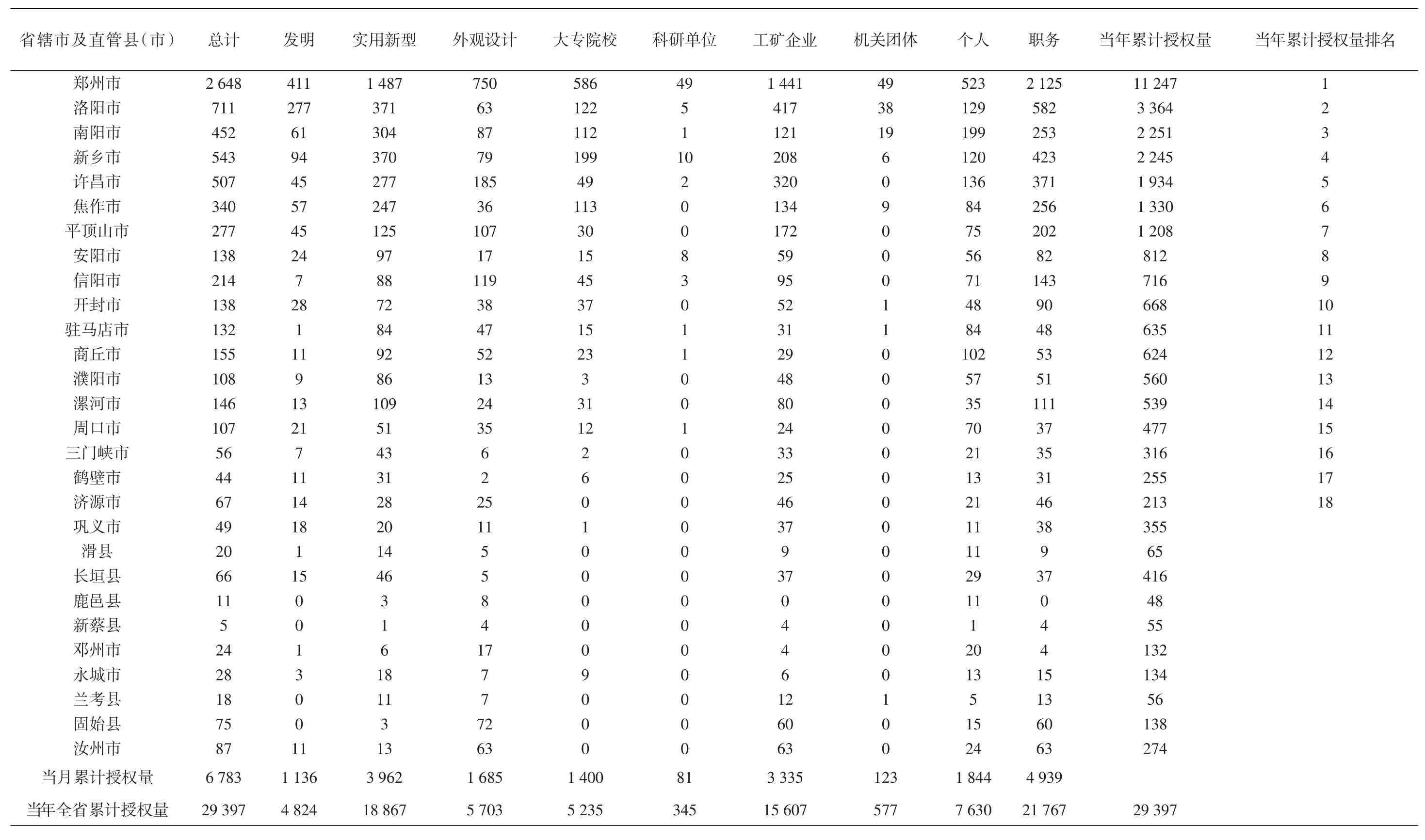
2016年河南省各省辖市及直管县(市)专利授权量统计表(7月)
V249.322
A
1003-5168(2016)07-0092-02
2016-6-30
田静分(1982-),女,硕士研究生,工程师,研究方向:捷联惯导系统的修理及保障。
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13
科学技术创新(2021年11期)2021-05-25
湖北农机化(2020年4期)2020-07-24
中国惯性技术学报(2019年3期)2019-10-15
电子制作(2019年7期)2019-04-25
宇航计测技术(2018年3期)2018-09-08
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
中国惯性技术学报(2015年1期)2015-12-19
