基于LabVIEW的FPSO陀螺仪3D姿态实时监测系统
2016-11-22 07:41黄永清张阳安
化工自动化及仪表 2016年2期
高 峰 黄永清 张阳安 洪 毅 田 佳
(北京邮电大学,北京 100876;2.中海油研究总院,北京 100028)
基于LabVIEW的FPSO陀螺仪3D姿态实时监测系统
高 峰1黄永清1张阳安1洪 毅2田 佳2
(北京邮电大学,北京 100876;2.中海油研究总院,北京 100028)
设计了一套FPSO陀螺仪3D姿态实时监测系统,给出了该系统的软硬件结构。系统基于LabVIEW虚拟仪器技术的三轴加速度数据提取程序,并设计了FPSO运动姿态实时显示人机交互界面。实验室测试结果表明:该系统能实时监测并还原FPSO运动实体的姿态。
3D姿态监测 陀螺仪 FPSO LabVIEW
海上浮式生产储油装置(FPSO)作为深水开发模式的关键设施,获得了广泛的关注和应用。目前,大多数FPSO作为海上油田的处理中心,采用的是离岸定位锚泊系统,并且不配备动力航行能力。锚泊方式分为单点系泊和多点系泊,多点系泊在FPSO的首尾各有一根以上的锚链将其直接锚泊于海底,限制船的直线运动与旋转运动,适用于风浪流方向单一的区域;大部分FPSO的系泊系统属于单点系泊,允许FPSO绕单点自由转动,从而减少风浪流的作用力。当前,主流的单点系泊系统为软钢臂式(Soft Yoke Mooring)和转塔式(Turret)[1]。单点系泊系统除自身要受到环境载荷的作用外,还要平衡来自FPSO的摇荡运动所产生的惯性作用力[2,3]。此外,单点还是原油管线、动力电缆及通信光缆等关键设施的连接点。我国南海是全球海况最恶劣的海域之一,台风频发,对单点系泊FPSO和海上油气田开发的安全生产提出了很大的挑战。目前,对FPSO的实时运动姿态缺乏有效的监测手段,在台风等恶劣的海况下,FPSO暴露在因姿态偏移安全的锚泊范围而导致油气管线泄漏或电缆/信号缆断裂的风险之中。因此,FPSO运动姿态的在线监测对深水油气田开发的安全运营、安全管理和工程建设有着重要意义。
笔者利用虚拟仪器技术,将高性能的陀螺仪3D姿态监测样机与高效灵活的数据提取[4]以及姿态还原软件结合起来,以惯性传感器作为运动实体,通过编写三轴加速度提取程序、LabVIEW串口数据帧提取程序和3D姿态实时显示人机交互界面,完成对运动实体三轴加速度的实时提取和姿态还原。该系统具有成本低、能耗低和轻便的特点,可实时对运动实体的姿态进行显示,应用于海上FPSO的姿态监测中具有极大的潜力。
FPSO运动姿态监测系统的结构如图1所示,该系统包括硬件部分和软件部分。硬件部分由惯性传感器、单片机、数据线和PC机构成。惯性传感器采用ADIS16365,可以感知运动实体的摇荡运动姿态。单片机采用ATmega128,通过编程提取传感器感知的三轴加速度数据,滤波处理后经RS232串口输出至PC端。软件部分包括基于LabVIEW虚拟仪器技术的三轴加速度数据提取程序[5]、运动姿态实时显示人机交互界面。

图1 FPSO运动姿态监测系统结构框图
VISA是LabVIEW软件中用于虚拟仪器编程的标准I/O函数库总称,VISA库驻留于计算机中,是计算机与虚拟仪器之间的软件层连接,通过高层的应用程序编程接口(API)调用低层的驱动程序以提取虚拟仪器特征参数或向虚拟仪器发布控制指令。LabVIEW运动姿态数据提取程序与PC通信串行接口采用RS232协议,信息帧格式如图2所示。数据1、数据2、数据3为三轴旋转速率,数据4、数据5、数据6为三轴加速度,帧尾为FF,通过帧尾校验保证数据的完整性提取。其中每个数据皆由4位十六进制字符串组成,信息传输速率115 200bit/s。

图2 运动姿态信息帧格式
运动姿态监测样机和实时显示人机交互界面如图3所示。该样机由惯性传感器、三轴加速度数据采集单片机和外围电路构成,摇荡运动姿态通过惯性传感器ADIS16365感应并映射为运动姿态信息帧,数据采集单片机对信息帧进行滤波去噪和同步处理,传输至PC机LabVIEW软件进行数据存储和姿态还原。
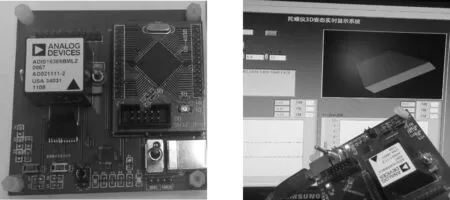
图3 姿态监测样机和运动姿态实时显示人机交互界面
2 实验测试
FPSO的艏-艉(前后)方向称纵向,用X表示;左-右舷(左右)方向称横向,用Y表示;上甲板-船舱底(上下)方向称垂直方向,用Z表示。人为改变姿态监测样机在X、Y、Z方向的加速度和绕Z轴的旋转速率,可以定性模仿FPSO在海上遇到的前后、左右、上下起伏和绕单点的旋转运动姿态,如图4所示。
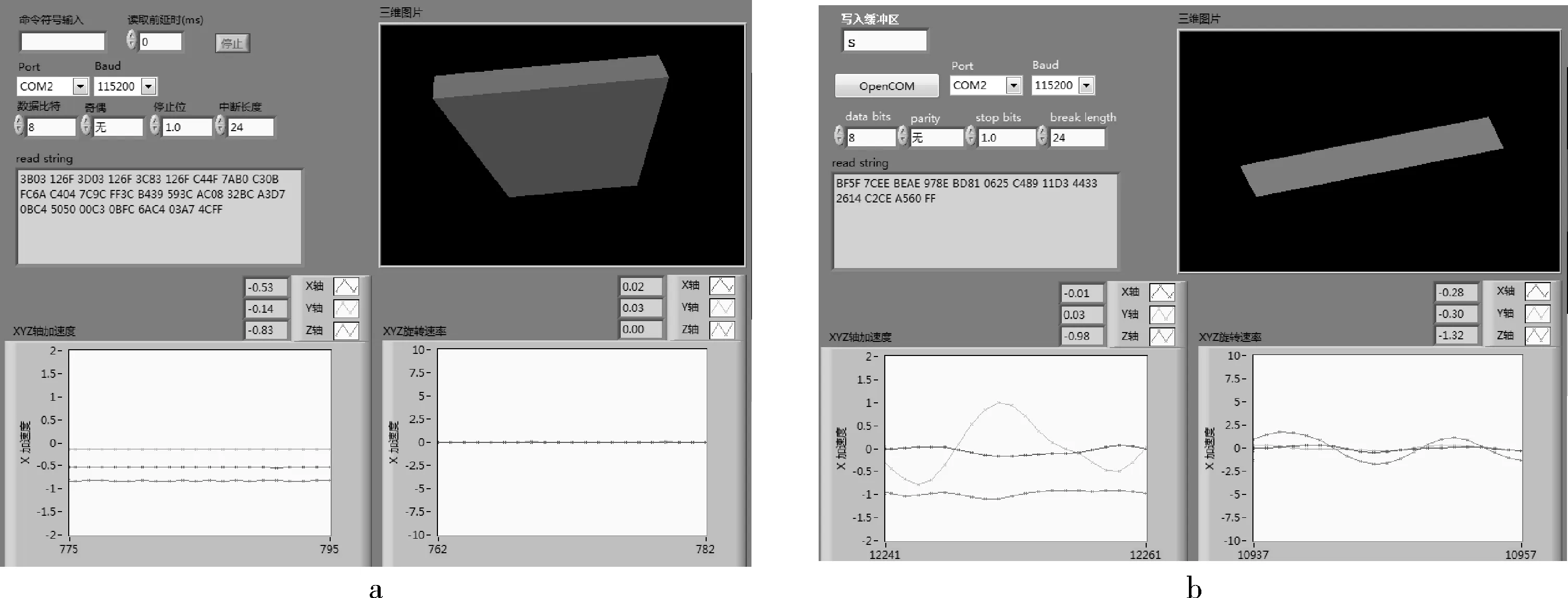
图4 运动姿态监测样机实验室测试结果
图4是采用虚拟仪器技术提取的姿态监测样机XYZ三轴加速度数据,其运动姿态和相关参数可实时显示于LabVIEW人机交互界面。图4a是模仿较为平静的海面,旋转速率为零时,姿态监测样机在X、Y、Z3个方向随机起伏运动的加速度。图4b模仿绕Z轴旋转速率不为零时,且横向起伏运动变化剧烈的情况,可见左下角代表横向的曲线剧烈波动,右下角代表绕Z轴旋转速率的曲线呈现周期性变化。
3 结束语
设计了一套低成本、低能耗、轻便的FPSO陀螺仪3D姿态实时监测系统,阐述了该系统的软硬件组成,将陀螺仪3D姿态监测样机与基于LabVIEW虚拟仪器技术的数据提取、姿态还原程序结合起来,以惯性传感器作为运动实体,将XYZ三轴加速度数据映射并还原为运动姿态,实时显示于人机交互界面,所有三轴加速度和旋转速率数值均可从后台读取并存储。利用该系统可检测海上FPSO的整体运动姿态,当运动数据超过预警值后,及时向操作人员和陆上终端发出报警,即使在台风撤离无人值守期间也能实时提取关键数据,以实现台风天气或其他恶劣海况下的预警保护作用。为了实现这个目标,还需进一步研究该实时监测系统在FPSO上的最佳布设方案、船体姿态还原数据与系泊受力特征值之间的统计关系,以确定最佳的姿态预警值。
[1] 吕立功,景勇,温宝贵,等.FPSO系泊系统设计上的考虑[J].中国造船,2005,46(z1):348~356.
[2] 亓俊良.FPSO单点系泊监测系统设计与应用[J].中国海上油气,2014,26(z1):31~34.
[3] 刘振国,杨贵强.服役期FPSO面临的挑战及应对措施[J].资源节约与环保,2012,(5):123~130.
[4] 李亚军,尤文卿,蔺亚军,等.基于实时数据库的换热器实时监测管理系统[J].化工机械,2011,38(4):475~476,494.
[5] 宋文龙,刘湘晨,周晓,等.基于Matlab和Solidworks的水轮机叶片设计和三维建模[J].化工机械,2015,42(1):93~96.
AReal-timeSystemforMonitoringFPSOGyro’s3DPostureBasedonLabVIEW
GAO Feng1, HUANG Yong-qing1, ZHANG Yang-an1, HONG Yi2, TIAN Jia2
(1.BeijingUniversityofPostsandTelecommunications,Beijing100876,China; 2.CNOOCResearchInstitute,Beijing100028,China)
A novel FPSO gyro’s 3D posture monitoring system was designed, including its software and hardware structure and human-machine interface for the real-time display of FPSO moving posture. The system has LabVIEW’s triaxial acceleration data based to extract the procedure. Laboratory tests show that this system can monitor and restore the state of FPSO moving object at real time.
3D posture monitoring, gyro, FPSO, LabVIEW
TH865
A
1000-3932(2016)02-0151-03
2015-04-14(修改稿)
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
石油知识(2019年3期)2019-02-13
百科探秘·航空航天(2017年9期)2017-12-31
电子制作(2017年13期)2017-12-15
电子制作(2017年1期)2017-05-17
电子制作(2017年9期)2017-04-17
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
珠江水运(2016年3期)2016-03-23