
脉冲激励下单摆运动轨迹解耦方法试验
2016-12-12 09:23宋世军张会敏宋连玉董明晓
中国工程机械学报 2016年2期
宋世军,张会敏,宋连玉,董明晓
(1.山东建筑大学机电工程学院,山东 济南 250101;2.山东富友慧明监控设备有限公司,山东 济南 250101)
脉冲激励下单摆运动轨迹解耦方法试验
宋世军1,张会敏2,宋连玉3,董明晓4
(1.山东建筑大学机电工程学院,山东 济南 250101;2.山东富友慧明监控设备有限公司,山东 济南 250101)
对脉冲激励下单摆运动轨迹的解耦方法进行了初步探讨.该方法通过摄像头获取单摆在脉冲力作用后的运动轨迹,通过拟合分析,从复杂运动中解耦出反应脉冲影响的强迫摆动轨迹,以及不受脉冲影响的弱阻尼自由摆动轨迹,并找到了表征脉冲大小的特征向量,从而实现了脉冲激励下单摆运动轨迹的解耦,为复杂状态下单摆运动的解耦分析奠定了基础.
单摆; 运动轨迹; 脉冲激励; 解耦; 拟合
在科学试验和工程检测中,经常要以单摆信号作为监测量对实际工况进行检测,如现有的地震仪、刚度仪、惯性振动仪等.为了保证监测结果的准确性,除了需要准确获知单摆的物理特性及各种参数外,还要求单摆轨迹能够准确反映外界条件的变化.但是实际使用过程中,由于阻尼、摆球线度、外界作用力等因素的影响,单摆的运动大多都是单摆自身和外界共同作用的耦合运动,相对复杂.许多文献都对单摆运动进行了分析,如文献[1-2]采用不同的方法对抽象化阻尼作用下的单摆运动进行了描述,文献[3-5]用解析的方法对空气浮力、摆角、摆球线度、摆线质量等因素对单摆周期的影响进行了分析,但是复杂状态下单摆运动轨迹的解耦分析,至今尚未见报道.
因此,如何从单摆的复杂运动中剖析出外界作用和单摆自身的运动,实现单摆运动轨迹的解耦,对外界状态的准确监测及单摆物理特性的研究具有重要意义.针对以上问题,本文对脉冲激励下单摆运动轨迹的解耦方法进行了初步探讨.
1 脉冲激励下单摆运动物理模型分析
理想状态下,当外界给单摆系统一个脉冲激励后,单摆的运动只受阻尼作用.考虑空气阻力作用,当初始角为θ0时,单摆的运动物理模型如图1所示.
小阻尼运动时,单摆受到的阻力与速度成正比,可以得到运动微分方程[6]:
(1)
式中:γ为阻尼系数;m为摆球质量;l为摆线长度;g为重力加速度.
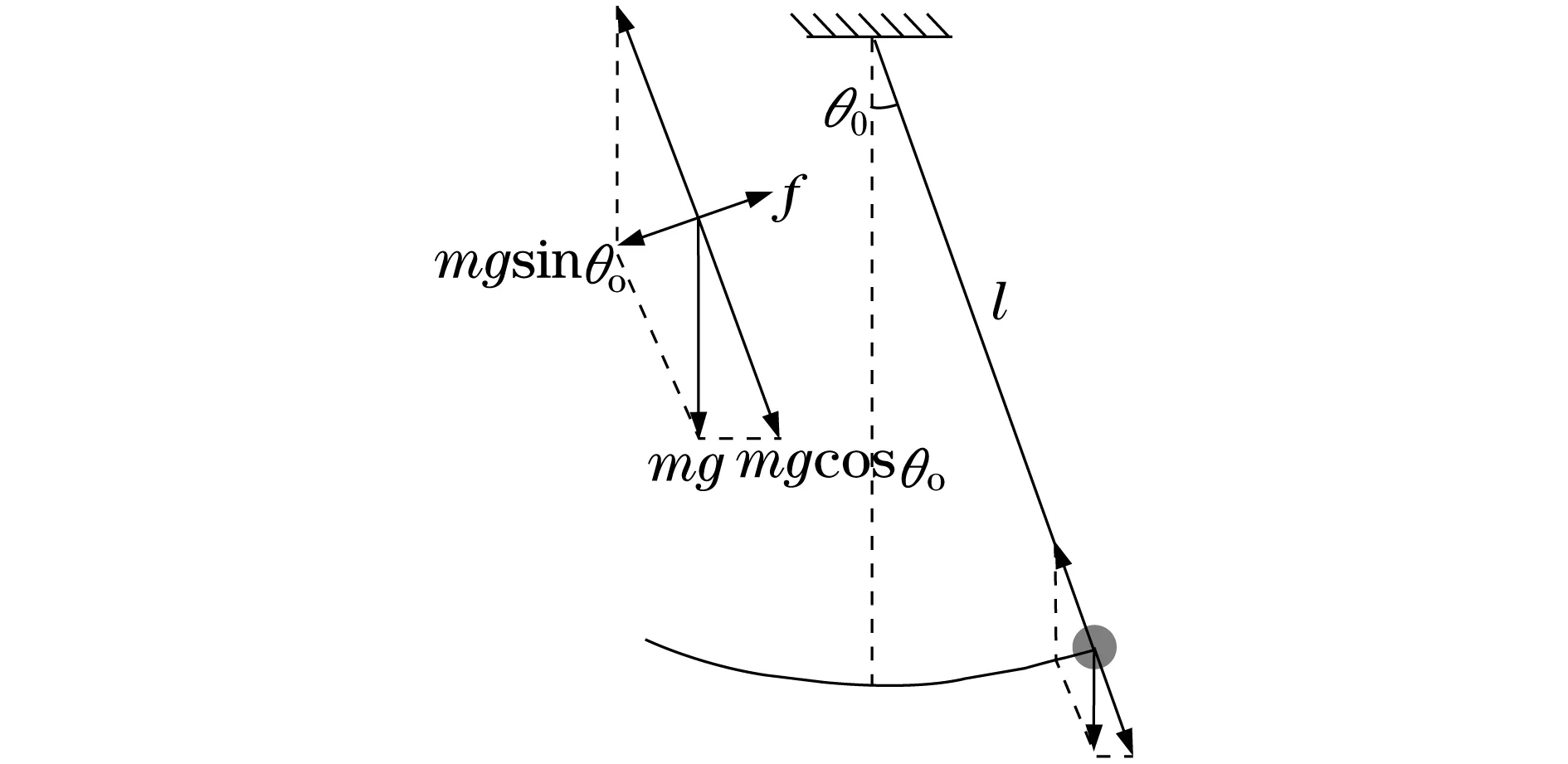
图1 单摆物理模型Fig.1 Single pendulum model
两端同除以ml得到
(2)
当θθo较小时,有sinθo=θo,故式(1)可变为
(3)
(4)
方程(4)的特征方程为
(5)
解得
(6)
当β<ω0时(弱阻尼条件下)
(7)

由此可得到方程(4)的通解为
(8)
式中:C1,C2与β有关的常数.由实数化条件,可把(8)化为
(9)
式(9)为单摆在弱阻尼作用下摆动时,单摆的摆角随时间的变化规律.
2 脉冲激励下单摆运动轨迹的获取
2.1 试验信号采集方法及模型信号分析
试验中为了方便获取单摆在脉冲激励后的运动轨迹,选择在单摆固定装置底部安装一个摄像头,记录单摆运动时摆球在成像平面的像素值,实现单摆运动轨迹信号的采集.式(9)为单摆摆动时摆角随时间的变化规律,要实现理论模型与试验数据之间的对比分析,只需将式(9)转换成摆球在成像平面的像素值随时间的变化函数即可.
当给单摆一个脉冲激励(瞬间将装有摄像头的单摆装置逆时针转过θ0)后,摆球摆动时,摆线倾角与摆球在成像平面的像素值之间的对应关系如图2所示.
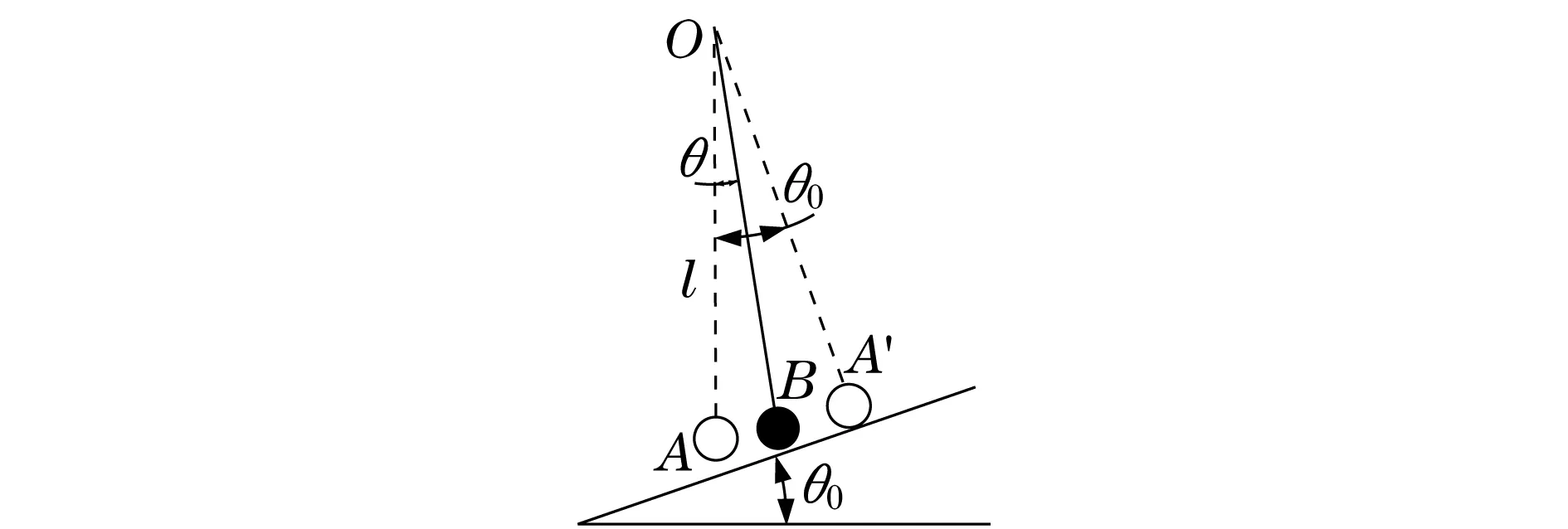
图2 单摆摆动示意图Fig.2 Pendulum swing schematic
图2中,A为单摆静止时摆球位置;A′为单摆装置转动θ0后A点对应的位置;B为单摆摆球当前位置;θ为摆线当前位置与铅垂线的夹角;l为单摆摆线长度.
摆线倾角与摆球在投影面的像素值之间的转换关系如下:
(10)
式中:L为OB在成像平面内的像素值;LA为OA在成像平面内的像素值.
当θ较小时,有sinθ=θ,故(10)式变为
(11)
式中:t为时间.
令la=H,e-β=I,式(11)变为
(12)
式(12)即单摆物理模型中单摆运动时摆球在成像平面内的像素值随时间的变化规律.
2.2 试验工况选取
为了获得单摆在不同脉冲激励下的运动轨迹,设计了以下4组试验,如表1所示.
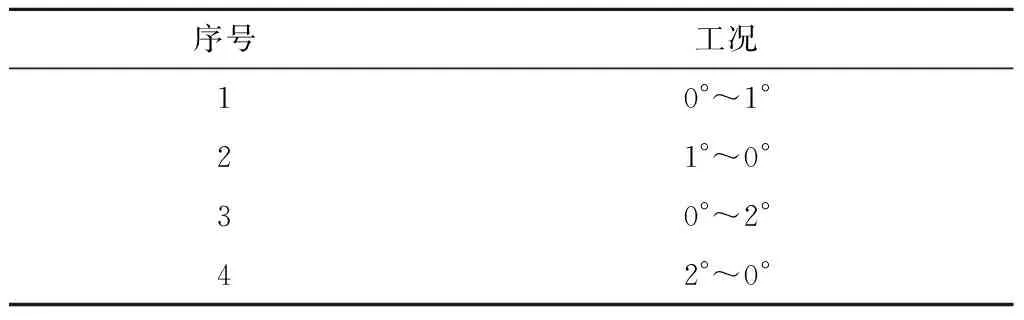
表1 试验工况列表
注:工况1表示单摆装置瞬间从0°转到1°后得到的单摆轨迹.
每组试验各进行4次,读取摄像头记录的摆球轨迹.
3 脉冲激励下单摆运动轨迹分析
将摄像头记录的坐标数据与摆球静止时的坐标值(像素值LA)作差处理后,基于时间序列得到各工况的单摆轨迹图,图3为工况3的单摆轨迹图.图3中,x,y分别为单摆运动轨迹车投影平面内沿x,y方向上的像素位.
从图3可以看出,单摆在x,y两个方向都有运动,可将轨迹分别投影到x,y两个方向,并进行差值拟合,结果如图4所示.
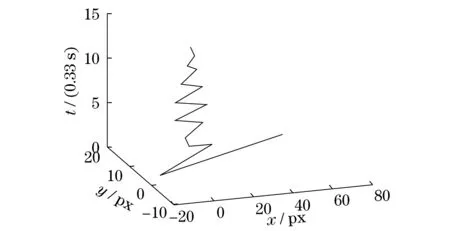
图3 工况3时单摆摆动轨迹图Fig.3 Pendulum trajectory graph of condition 3
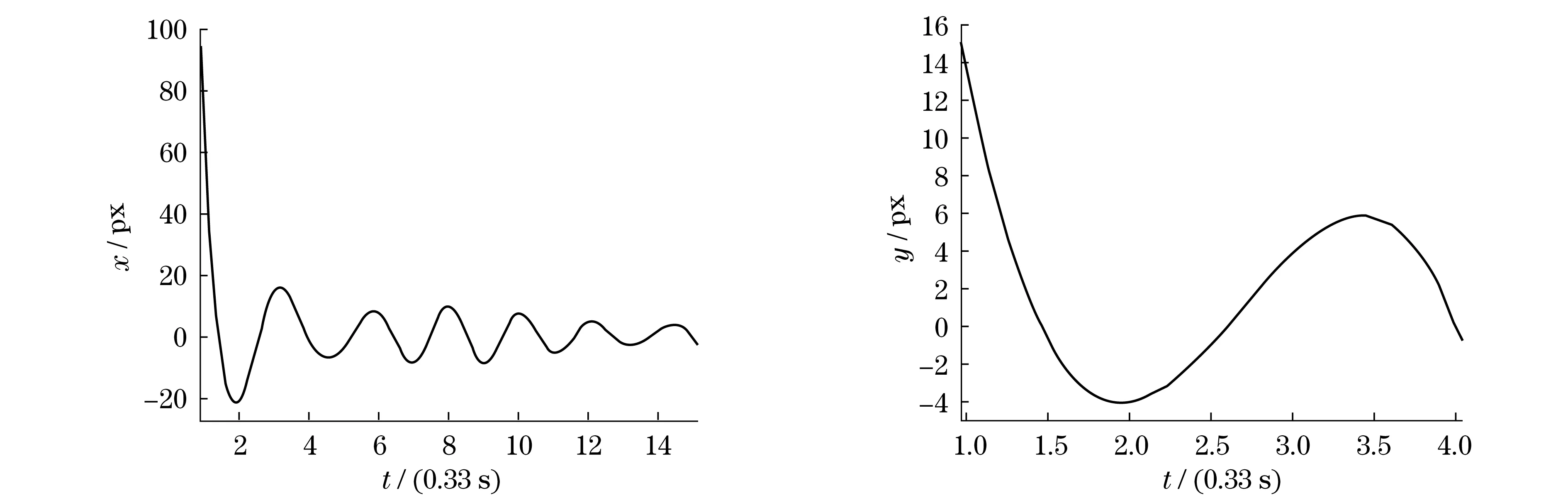
图4 单摆x,y方向的轨迹Fig.4 Simple pendulum trajectory of x,y direction
由图4可知,单摆在x和y两个方向的摆动轨迹均符合弦函数,且在工况3的情况下,单摆在x方向的摆动幅度、摆动时间都大于y方向,因此,研究单摆运动轨迹时,可以选取x方向的数据进行分析.
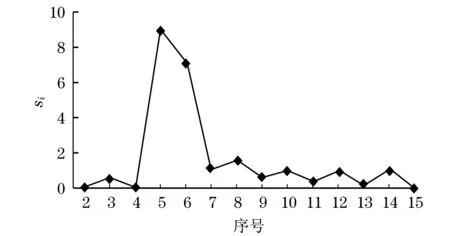
图5 单摆x方向相位值变化比Fig.5 Phase changing ratio in the direction of x
图5可以看出,单摆x方向的相位值变化比si在第5个单位时间出现拐点,且在图4中,单摆轨迹也是在第5个单位时间时振幅、频率发生变化,之后趋于规律.由此推测,单摆的运动并不只是弱阻尼下的自由摆动,而是两个运动过程的合成,且拐点出现在第5个单位时间,因此可以将整个运动过程分为两个阶段:①强迫摆动阶段,用t1表示;②弱阻尼条件下自由摆动阶段,用t2表示.
单摆在x方向的各阶段运动轨迹解析如图6所示.
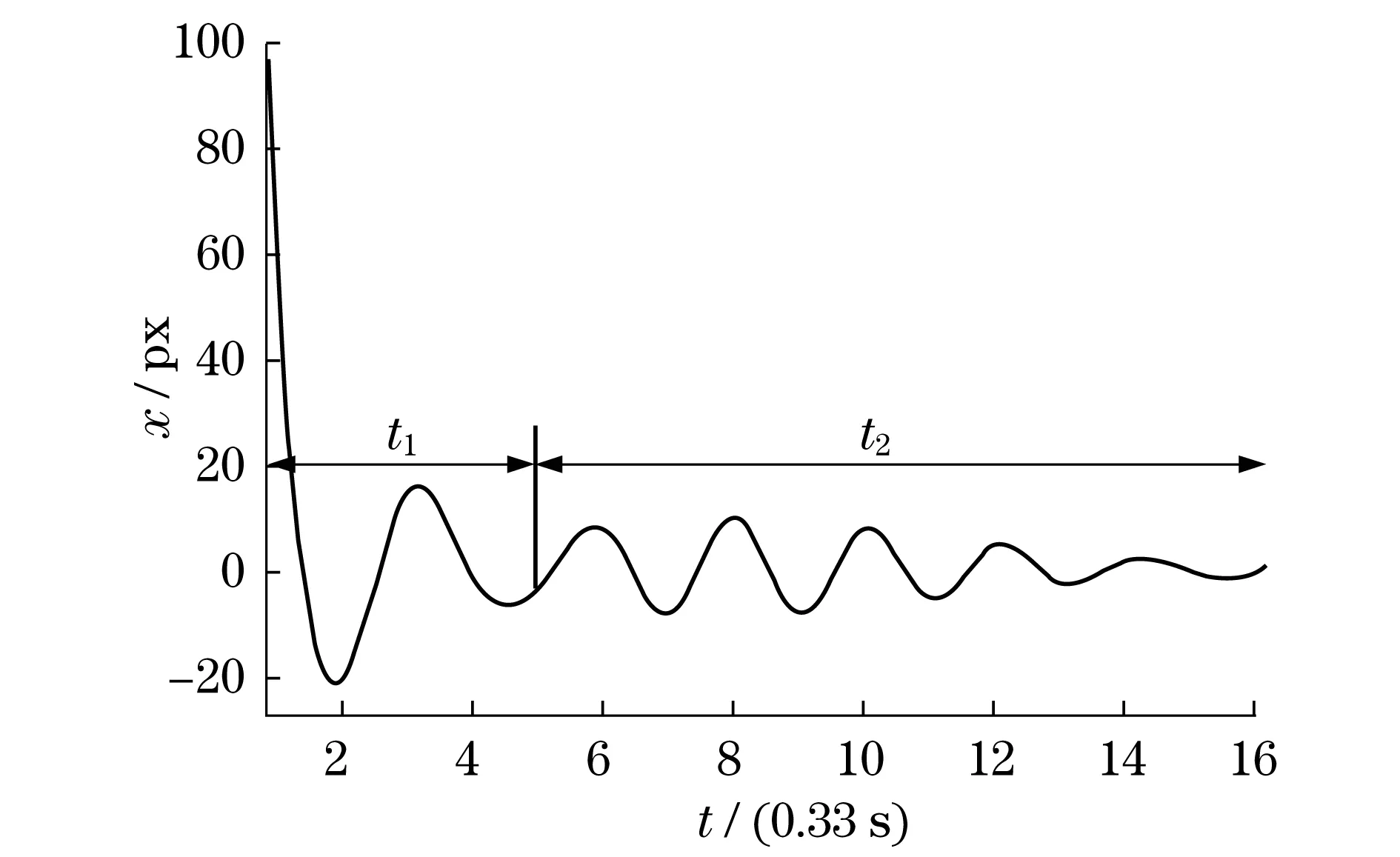
图6 单摆x方向运动轨迹解析图Fig.6 Analysis of the pendulum trajectory in the direction of x
图6中,在强迫摆动阶段,单摆摆动的振幅变化大,且运动时间短,能够客观反应脉冲力、摆球线度、阻尼等综合因素下单摆的运动特性;而在自由摆动阶段,只有阻尼的影响,运动过程相对简单,对于脉冲力大小的分析,此阶段数据属于干扰信号,可以忽略不计.因此,可以构造特征向量 γ=[s2,t1]来描述脉冲力的大小以及单摆强迫摆动的时间.上述4组试验得到的16个特征向量平面图如图7所示.
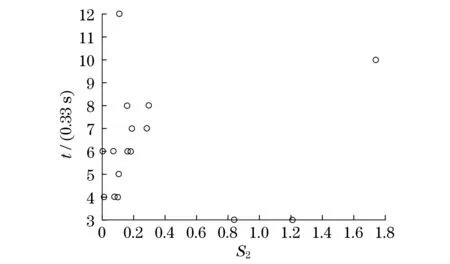
图7 特征向量平面图Fig.7 Characteristic vector graph
由图7可知,16次试验的特征向量各不相同.可以用特征向量记录并区分不同的轨迹信息,进而从复杂的轨迹中分离出纯净的特征信号轨迹,简化分析数据,最终实现单摆运动轨迹的初步解耦.
4 弱阻尼状态下单摆运动轨迹拟合
为了考察脉冲力的大小是否只对第一阶段的运动轨迹有影响,以检验上述解耦方法是否正确,将解耦出的第二阶段的数据带入式(12)进行拟合求解[7],原始数据点与带入求解参数拟合后的轨迹如图8所示.
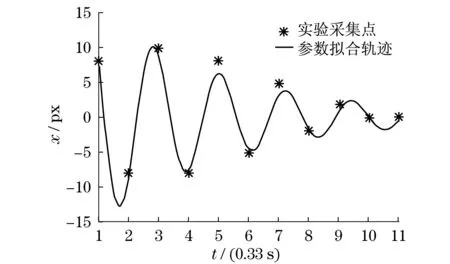
图8 拟合效果图Fig.8 Fitting rendering
由图8可以看出,拟合效果比较理想,为验证拟合效果的真实性和普遍性,按上述参数求解方法将前4组工况的16组试验数据进行处理,得到参数的折线图如图9—12所示.
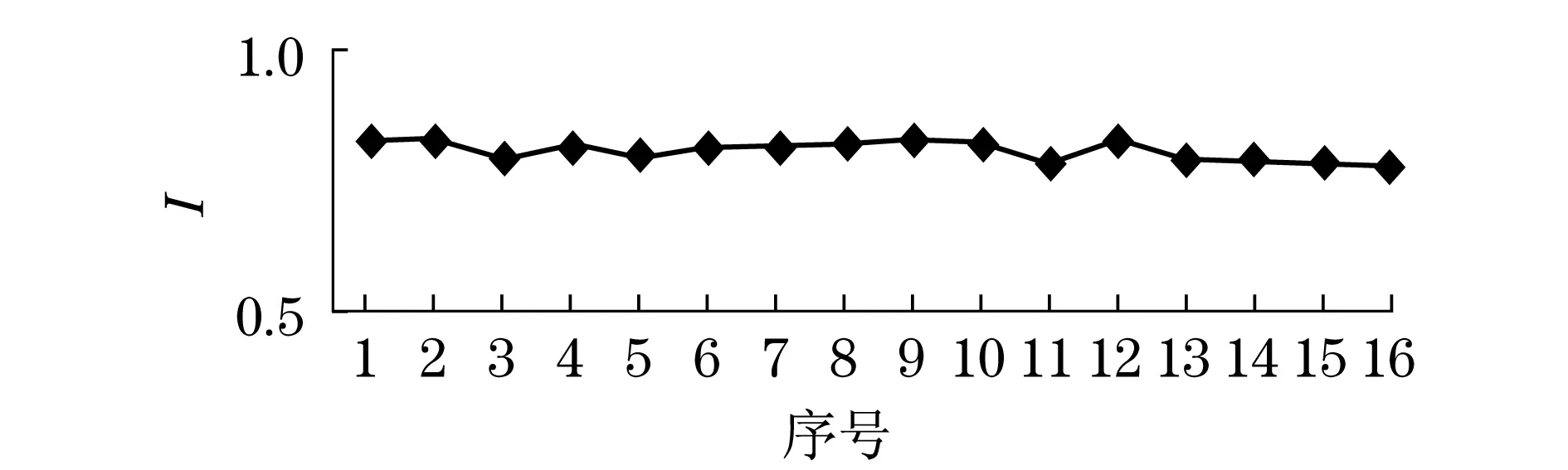
图9 参数I的取值折线图Fig.9 Line graph of parameter I
由图9可知,Imax=0.83,Imin=0.79,Imax-Imin=0.04,可见,I的求解值相对稳定.
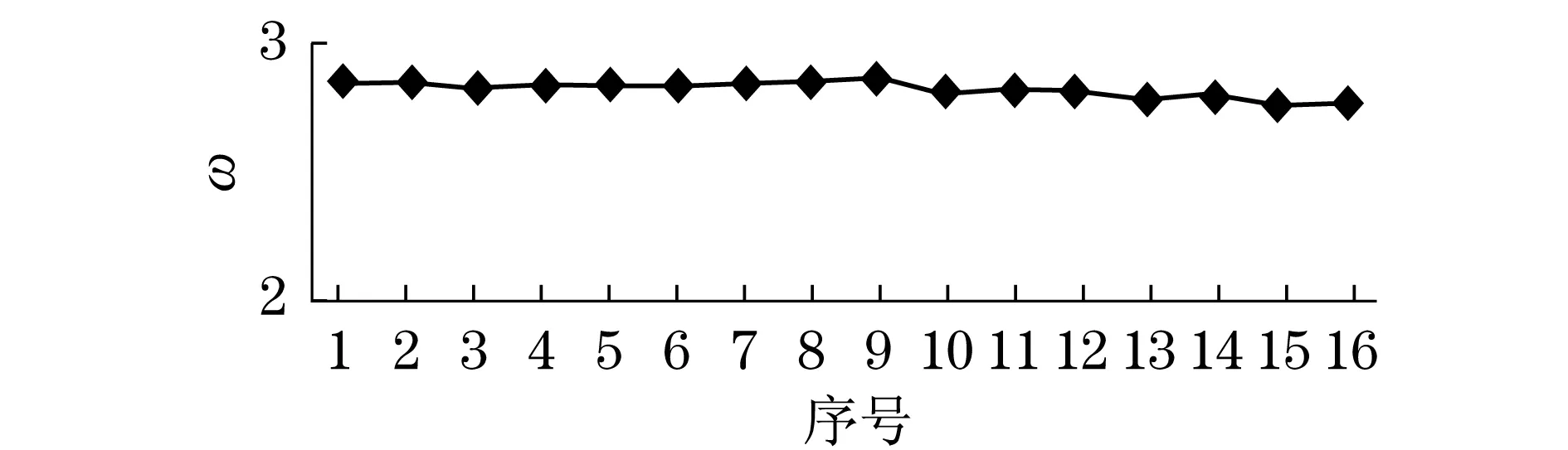
图10 参数ω的取值折线图Fig.10 Line graph of parameter ω
由10可知,ωmax=2.86,ωmin=2.77,ωmax-ωmin=0.09,可见,ω的求解值相对稳定.

图11 参数φ的取值折线图Fig.11 Line graph of parameterφ
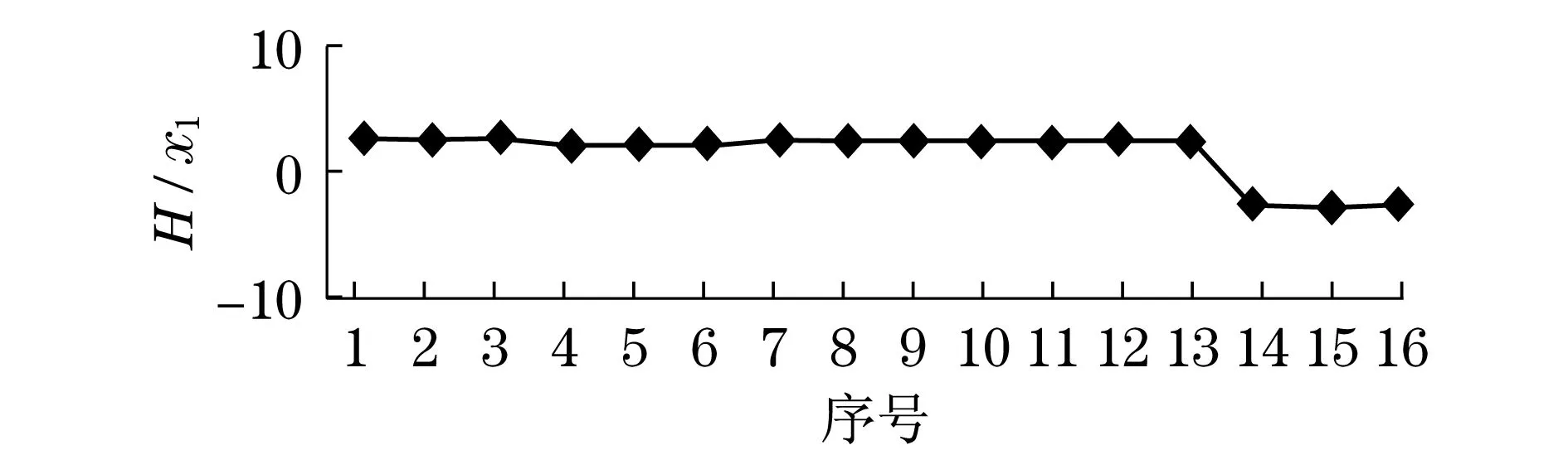
图12 参数的取值折线图Fig.12 Line graph of parameter
由图11,12知,初始相位角φ和H/x1的取值区域相反(即φ和H的取值区域相反,初始相位角的取值和采样频率等因素有关),但在不同区域,φ和H/x1的取值都相对稳定.
上述参数统计结果表明:不同工况、不同试验的解耦数据拟合出的各参数的取值区间相对固定,且范围变化较小,说明解耦出的第二阶段的单摆轨迹不受脉冲激励的影响,与数学模型吻合,进而说明解耦方法正确.
5 结语
本文理论推导了弱阻尼状态下单摆运动的模型公式,通过脉冲激励下单摆运动轨迹分析,从单摆运动轨迹中解耦出反应脉冲大小的强迫摆动阶段以及只受阻尼影响的自由摆动阶段,并用数据-模型拟合的方法,对弱阻尼下的自由摆动数据进行拟合,验证了解耦方法的正确性,并得出如下结论:以单摆运动轨迹作为监测信号研究单摆所受外界脉冲力时,只对强迫摆动阶段数据进行分析即可.此方法既可以简化分析数据,提高运算效率,又可以提高数据的准确性,为单摆信号的分析提供了一种新的方法.
此外,在拟合单摆弱阻尼下的运动轨迹时,可以求解空气阻尼、单摆摆长、频率等参数,这也为均质流体阻尼参数及单摆物理参数的测量提供了一种新思路.
[1] 侯祥林,徐心和.单摆非线性系统阻尼参数的研究[C]∥2007中国控制与决策学术年会论文集,沈阳:东北大学出版社,2007:13-15.
HOU Xianglin,XU Xinhe.Study on resistance parameterofsingle pendulumnonlinear system.[C]∥Proceedings of 2007 Chinese Control and Decision Conference,Shengyang:Northeastern University Press,2007:13-15.
[2] 熊化高,陈浩.有阻尼单摆的冲击波解[J].大学物理,2007(12):18-19.
XIONG Hualin,CHEN Hao.A damping shock wave solution of single pendulum[J].College Physics,2007(12):18-19.
[3] 刘艳军,肖波齐.考虑摆球线度与摆线质量时单摆的周期研究[J].陕西科技大学学报,2011,29(2):137-139.
LIU Yanjun,XIAO Boqi.Simple pendulum cycle research whenconsidering pendulum ball line degree and quality[J].Journal of Shaanxi University of Science & Technology,2011,29(2):137-139.
[4] 鞠衍清,张风雷.综合因素作用下的单摆运动分析[J].辽东学院学报,2010(2):151-156.
JU Yanqing,ZHANG Fenglei.Pendulum motion analysis under a combination of factors[J].Journal of Liaodong College,2010(2):151-156.
[5] 龚善初.影响单摆振动周期的参数研究[J].大学物理,2006(6):12-15.
GONG Shanchu.Research on parameters that influence vibration period of the pendulum[J].College Physics,2006(6):12-15.
[6] 尹芬芬.单摆的各种运动情况的理论研究[J].湖南中学物理,2014(10):62-65.
YIN Fenfen.Theoretical study on various movements of the pendulum[J].Human Middle School Physics,2014(10):62-65.
[7] 严九洲,杨军,张怀作,等.测定空气阻力系数新方法[J].长春工业大学学报:自然科学版,2012,33(2):200-204.
YAN Jiuzhou,YANG Jun,ZHANG Huaizuo,et al.New method for determining air resistance coefficient[J].Journal of Changchun University of Technology:Science and Technology,2012,33(2):200-204.
Experimental study on decoupling method of the pendulum trajectory after impulse excitation
SONG Shi-jun1,ZHANG Hui`min1,SONG Lian-yu2,DONG Ming-xiao1
(1.Shandong Jianzhu University,Mechanic and Electronic Engineering,Jinan 250101,China;2.Shandong Foryou Sunshine Enlightened Measurement and Control Equipment Co.,Ltd.,Jinan 250101,China)
This paper discusses decoupling method of the pendulumtrajectory after impulse excitation.Theauthoruses a camera to obtain simple pendulum trajectory after impulse excitation,by fitting analysis,decouples out the forced swing trajectory from the complex motion trajectory,and the free swing trajectory in weak damping,which is not affected by impulse,and find out the characteristic vector which can represent the impulse,thus realize the decoupling of the pendulum trajectory after impulse excitation,which will lay a foundation for the decoupling of the pendulum trajectory under complex condition.
pendulum; trajectory; impulse excitation; decoupling; fitting
国家自然科学基金(51475277).
宋世军(1965-),男,教授,博士后.E-mail:songshj@sdjzu.edu.cn
TH 7
A
1672-5581(2016)02-0157-05
猜你喜欢
数学物理学报(2022年3期)2022-05-25
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
中学生数理化(高中版.高考理化)(2020年5期)2020-05-22
中学生数理化(高中版.高考理化)(2020年2期)2020-04-21
北方工业大学学报(2019年5期)2019-03-30
中成药(2017年12期)2018-01-19
弹箭与制导学报(2015年1期)2015-03-11
汽车与新动力(2013年3期)2013-03-11
