二维光电自准直仪中分划板研究
2016-12-17 05:11于建楠周志炜
传感器与微系统 2016年12期
王 晔,于建楠,周志炜
(中国电子科技集团公司 第四十九研究所,黑龙江 哈尔滨 150001)
二维光电自准直仪中分划板研究
王 晔,于建楠,周志炜
(中国电子科技集团公司 第四十九研究所,黑龙江 哈尔滨 150001)
根据二维光电自准直仪的工作原理和结构特点,针对V形分划板、N形分划板和M形分划板在线阵CCD器件增维测量中的作用原理进行了研究,得出其在增维测量中的优点和缺点,为不同应用条件的二维光电自准直仪选用分划板提供了参考依据。
光电自准直仪; 增维; 分划板
0 引 言
光电自准直仪被广泛应用于角度测量、导轨的平直度和平行度测量、台面的平整度测量、精密定位、自动角度定位环集成等方面[1],是机械制造、造船、航空航天、计量测试、科学研究等部门必备的常规测量仪器。特别是在精密、超精密定位方面,有着不可替代的作用。
分划板主要有十字分划板、字母分划板和小孔分划板等,在光电自准直测量中,自准直像本质上就是分划板所成的像,分划板的刻线形状决定了目标的形状,不同的分划板形状和不同的图像处理方法相结合能够得到不同的角度分辨率,对测量范围也有较大影响,因此,选择什么形状的分划板对光电自准直仪很重要。目前常见的用于二维测量的分划板有十字分划板、V形分划板、N形分划板、M形分划板等。本文针对各类分划板在线阵CCD器件增维测量中的作用原理进行了研究,为二维光电自准直仪选用分划板提供了参考依据。
1 光电自准直仪原理
光电自准直仪是以自准直原理为基础[3],通过光学器件的组合,用CCD等测微系统对被测件进行角度位移的精密测定仪器[2],原理示意图如图1所示。
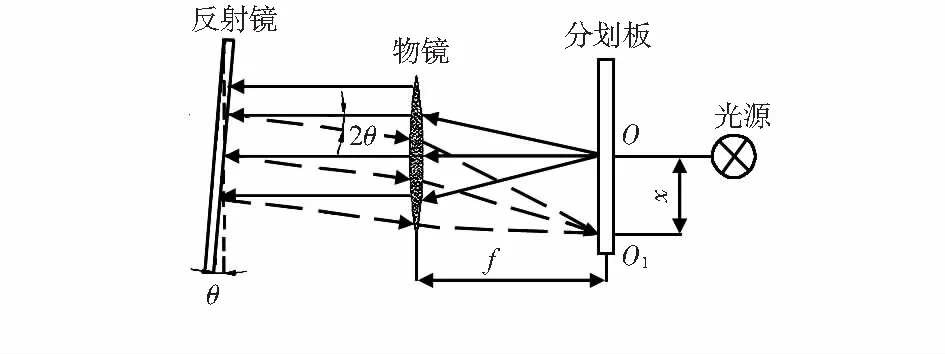
图1 自准直仪光学原理图Fig 1 Autocollimator optical principle diagram
当光源发出光线照明位于物镜焦平面上的分划板,o点在物镜光轴上,那么由它发出的光线通过物镜后,成一束与光轴平行的平行光束射向反射镜,当反射镜面垂直于光轴时,光线仍然按原路返回,经物镜后仍成像在分划板上o处,与原目标重合。
当反射镜面与光轴不垂直,而是有小偏转角度α,当平行光轴的光线射向反射镜时,光线按反射定律与原光线成2θ返回,通过物镜后成像在分划板上的O1处,与原目标不重合而有X的位移量。根据三角关系可推算出
(1)
式中 θ为反射镜偏转角,x为光斑回像位移,f为物镜焦距。
因为物镜是固定的,所以f为固定值。如果已知了x的数值,就可以根据式(1)计算出反射偏角θ的大小。
2 二维光电自准直仪现状
目前较先进的光电自准直仪技术是将CCD器件作为光电标尺,利用分划板的刻线在CCD像面上的位置变化进行测量,摆脱了原有自准直仪跟踪零位的方法,省去了机械或伺服跟踪,简化了仪器的结构。
在使用CCD器件的自准直仪中,一般都是采用一维CCD器件测量一维坐标,采用二维CCD器件测量二维坐标。当分划板采用十字分划板时,在共轭物镜焦平面上放置1片面阵CCD图像探测器件,即可以接收对应于二维坐标的分划丝十字图像[4]。但是面阵CCD的价格昂贵,且信号处理量大,分辨能力有限,分辨率远不如线阵CCD,光学机械结构和处理电路也要比采用线阵CCD器件复杂很多。因此,如何应用线阵CCD同时测量多个自由度数据就成为值得深入研究的问题。
传统的用线阵CCD器件来测量二维坐标的方法,是将入射光束经分光棱镜分成两束光线,在两个共轭焦平面处分别放置1片线阵CCD器件[5]。这样可以有效地减少成本,但是采用这种方法,十字线影像接近视场中心时,无法克服十字线的盲区问题,当x向的十字线影像在零位上时,刻线影像在y向上完全罩住CCD,此时,十字线影像在y方向上的位移则检测不到,即零位附近存在盲区,同样,在x方向上也存在零位盲区。而且采用2片线阵CCD器件,驱动电路及信号处理电路都要做2套,仪器结构复杂,仪器成本也随之提高,且2套处理系统的一致性也是影响测量精度的一个不可避免的因素[6]。这样的方法在高精度的测量中并不可取,但是由于其方法简单,数据处理方便,在低精度的测量中得到比较多的应用。
3 通过分划板的选择完成增维测量
在小角度高精度要求的自准直仪中,可以选用以下几种分划板,即可实现用1片线阵CCD器件测量二维位移。以下将对几种分划板的实现方式和优缺点进行探讨。
3.1 采用V形分划板实现二维测量
V形分划板在线阵CCD上实现二维测量的原理如图2所示。
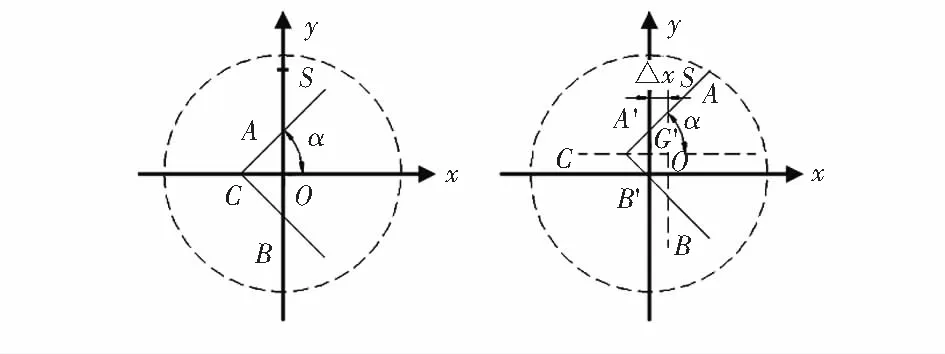
图2 V形分划板测量原理图Fig 2 V shape of reticle measurement principle diagram
设y轴为CCD线阵,其垂线设为x轴,当V形分划板的中心位于坐标原点时为初始参考位置,此时与CCD的交点分别为A,B,∠ACO=∠BCO=α,AO=BO=d,设S点为线阵CCD零位,令SA为固定值1。当被测物反射面在x轴方向发生角度偏转θx时,V形在x坐标平面上发生位移Δx,当被测物反射面在y轴方向发生角度偏转θy时,V形在y坐标平面上发生位移Δy,V形与CCD线阵y轴新的交点为A′,B′。由O做y轴的垂线OG′,显然OG′即为V形在x轴上的偏移量Δx。
由三角关系式可以得出
(2)
这种V形分划板具有测量范围小的缺点。为了使自准直仪在x方向和y方向具有相等的测量范围,如图3所示,需要x=y,即α=45°,因此,需要将V形分划板的V形夹角2α设定为90°,同时也使得测量范围只能达到CCD感光面的1/2。

图3 V形分划板测量范围示意图Fig 3 V shape of reticle measurement range diagram
本文设计的自准直仪测量范围x轴为±5.2°,y轴为±4.6°,测量误差45″。选用物镜的焦距f为22 mm。使用的CCD器件TCD1501像元尺寸为8 μm,像元数量3 600个,根据式(1),可以得出最小可分辨角度为37.5″,可以满足测量误差要求。当采用V形分划板时,x轴和y轴最大测量范围为±4.5°,无法满足设计的自准直仪测量范围的要求。
由于V形分划板具有测量方法简单,数据处理比较方便,仪器的成本比较低,同时仪器的结构比较紧凑,系统的可靠性和测量的准确度比较高,且可以克服零点盲区的问题等优点,在测量范围不是要求特别大的情况下,这种方法还是具有较大的应用价值。
3.2 采用N形分划板实现二维测量
为了提高增维测量的测量范围,充分利用CCD的感光面,可以采用如图4所示的N形分划板,实际上是模拟2个V形倒置连接,可以实现较大的测量范围。

图4 N形分划板测量原理图Fig 4 N shape of reticle measurement principle diagram
仍然设y轴为CCD线阵,其垂线设为x轴,当N形分划板的中心位于坐标原点时为初始参考位置,此时与CCD的交点分别为A,B,C,∠ADF=∠CFD=α,AB=BC=d,设S点为线阵CCD零位,S点在CCD上位置固定,SA=1。当被测物反射面在x轴方向发生角度偏转θx时,N形在x坐标平面上发生位移Δx,当被测物反射面在y轴方向发生角度偏转θy时,N形在y坐标平面上发生位移Δy,N形与CCD线阵y轴的交点为A′,B′,C′。由B做y轴的垂线BG′,显然BG′即为N形在x轴上的偏移量Δx。
由三角关系式可以得出
(3)
如图4左图所示,线阵CCD零位为S点,则N形分划板y方向正向最大测量范围为SA,x方向正向最大测量范围为AD。设CCD正方向视界为r,则有
(4)
可见N形分划板的测量范围与α和CCD视界相关。本文设计的自准直仪测量范围x轴为±5.2°,y轴为±4.6°,通过式(1),可得到当AD大于4.04mm即可满足y轴测量范围,当SA大于3.57mm即可满足y轴测量范围,即α小于69°即可满足测量范围的设计要求。
N形分划板不仅克服了零点盲区,相对于V形分划板,由于在线阵CCD上有三点相交,因此其测量范围较大,且测量精度也有很大提高,能够满足高精度的自准直测量,目前得到比较广泛的应用。
3.3 采用M形分划板实现二维测量
为了进一步提高测量精度,还可以采用M形分划板进行增维测量。M形分划板测量原理如图5所示。
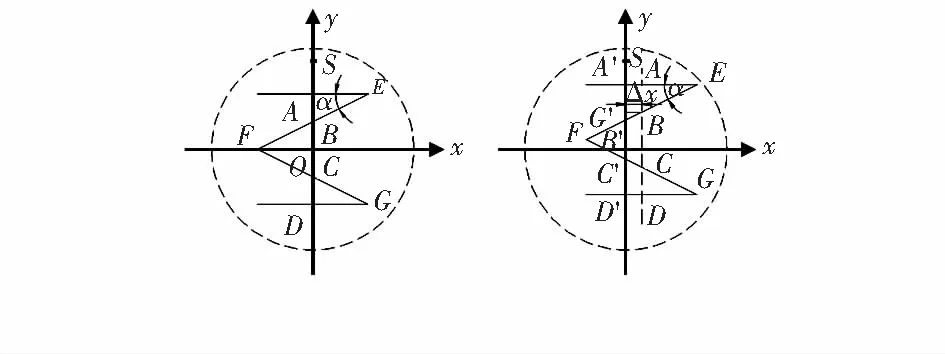
图5 M形分划板测量原理图Fig 5 M shape of reticle measurement principle diagram
仍然设y轴为CCD线阵,其垂线设为x轴,M形为左右对称结构。当M形分划板的中心位于坐标原点时为初始参考位置,此时与CCD的交点分别为A,B,C,D,∠AEF=∠BFO=α,AB=BO=OC=CD=d,设S点为线阵CCD零位,S点在CCD上位置固定,SA=1。当被测物在x轴方向发生角度偏转βx时,M形在x坐标平面上发生位移Δx,当被测物在y轴方向发生角度偏转βy时,M形在y坐标平面上发生位移Δy,M形与CCD线阵y轴的交点为A′,B′,C′,D′。由B做y轴的垂线BG',显然BG'即为M形在x轴上的偏移量Δx。
由三角关系式可以得出
(5)
如图5左图所示,线阵CCD零位为S点,则M形分划板y方向正向最大测量范围为SA,x方向正向最大测量范围为AE。设CCD正方向视界为r,则有
(6)
可见M形分划板的测量范围与α和CCD视界相关。本文设计的自准直仪测量范围x轴为±5.2°,y轴为±4.6°,通过式(1),可得到当AE大于4.04mm即可满足y轴测量范围,当SA大于3.57mm即可满足y轴测量范围,即α小于53°即可满足测量范围的设计要求。
M形分划板同样克服了零点盲区的问题,并且由于有四点与线阵CCD相交,测量范围和测量精度进一步提高。但是在实际测量中,需要考虑到CCD的分辨率、数据处理计算等因素,分划板图形的进一步复杂对测量范围和精度的提高不是很大,而对线阵CCD的分辨率却要求更高,这样就会使成本提高很多,且数据处理也不是很方便,得不偿失。
4 结 论
通过不同类型分划板的选择,一维线阵CCD器件可以完成二维参量的测量。通过不断改进分划板的刻线形式,可以提高CCD器件的利用率,增大测量范围。在二维光电自准直仪中,采用一片线阵CCD进行二维角度的测量,不仅降低了仪器的成本,而且减少了仪器的体积,使仪器的结构更加紧凑,同时,由于只采用一个接收器件,提高了系统的可靠性和测量的准确度。在实际的应用中,可根据自准直仪精度、测量范围、测量方便程度、经济等不同因素,选择不同特点的分划板。
[1] 罗 钧,万文通,卢嘉江.光电测量二维微角位移的新方法研究与实现[J].传感器与微系统,2008,27(8):51-53.
[2] 林润芝,杨学友,等.面向大尺寸检测ccD图像中心提取精度的研究[J].传感器与微系统,2010,29(12):51-53.
[3] 张继友,范天全,曹学东.光电自准直仪研究现状与展望[J].计量技术,2004(7):27-29.
[4] 浦邵邦,陶 卫,张 琢.角度测量的光学方法[J].光学技术,2002,28(2):1-2.
[5] 何树荣,张 乐,鲍 鹏.采用单线阵CCD测量工作台二维位移的研究[J].光学技术,2003(11):710-712.
[6] 寇欣宇,王向军.CCD增维测量原理及其在二维光电自准直仪中的应用[J].计量技术,2000(7):27-30.
Study on reticle in two-dimensional photoelectric auto collimator
WANG Ye, YU Jian-nan, ZHOU Zhi-wei
(The 49th Research Institute,China Electronics Technology Group Corporation,Harbin 150001,China)
Based on working principle and structure characteristics of two-dimensional photoelectric autocollimator,effect principle of V-shape and N-shape and M-shape forms of reticle in line array CCD in dimension increasing measurement is studied,in its advantages and disadvantages dimensional increasing measurement is obtained provide reference for reticle selection in different application conditions for two-dimensional photoelectric autocollimator.
photoelectric autocollimator; incremental dimension; reticle
10.13873/J.1000—9787(2016)12—0024—03
2016—10—26
TP 212
A
1000—9787(2016)12—0024—03
王 晔(1971-),女,黑龙江哈尔滨人,硕士,高级工程师,主要从事传感器技术与仪器智能化研究工作。
猜你喜欢
数学物理学报(2022年2期)2022-04-26
科教创新与实践(2021年33期)2021-11-23
进出口经理人(2017年9期)2017-09-22
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
光学精密工程(2016年3期)2016-11-07
兵器装备工程学报(2016年5期)2016-06-15
动力工程学报(2016年3期)2016-04-19
贵州师范学院学报(2016年6期)2016-02-27
湖北民族大学学报(自然科学版)(2015年2期)2015-12-09