第19届国际信息融合会议及获奖论文评述
2016-12-20 07:21何佳洲马继伟王昱槐
指挥控制与仿真 2016年6期
何佳洲,马继伟,王昱槐,安 瑾
(江苏自动化研究所,江苏连云港 222061)
第19届国际信息融合会议及获奖论文评述
何佳洲,马继伟,王昱槐,安 瑾
(江苏自动化研究所,江苏连云港 222061)
总结了第19届国际信息融合会议的总体情况和主要特点,通过对大会报告、分会场报告以及国际信息融合界一些著名专家团队发表论文情况的统计分析,提炼出国际信息融合界普遍关注的焦点和难点问题;通过对获奖论文的分析,了解到受大会评奖委员会一致认可的年度优秀成果和技术进步点;最后,面向高层信息融合中的不确定性处理,对信息融合领域的发展进行展望。
国际信息融合会议;获奖论文;JDL模型;非线性滤波;扩展目标跟踪;基于上下文信息融合
第19届国际信息融合会议[1]于2016年7月5日至8日在德国海德堡举行。本次会议共收到投稿论文413篇,录用312篇,录用率75.5%。内容涉及数据关联、非线性滤波、计算机视觉、目标跟踪识别等诸多研究方向,分别被安排在44个正式会场和创纪录的22个特别专题会场(Special Session),应用领域覆盖军事和民用领域的监视、智能、交通控制、车辆自动化,以及生物和医学方面的图像、模式、行为的识别和解释等不同的主题。
国际信息融合会议[2]自1998年以来每年举行一次,起初该会议主要是为美国和北约等国家的工业、政府部门以及学术界的研究者提供一个交流平台,目的是增进国际间信息融合最新理论、研究成果以及相关工程应用的交流。信息融合也称数据融合,有较强的军事应用背景,一直受到诸多军方研究者密切关注并踊跃参加该系列会议,近几年,随着军民融合不断深入,信息融合领域也更加开放。令人瞩目的第20届国际信息融合大会将在中国西安召开[3],这将是信息融合的系列会议首次来到中国,或许成为信息融合领域开放、包容发展的一个里程碑。
本文针对大会作简要小结,从大会的总体情况、获奖论文、融合中不确定性处理以及信息融合未来发展等方向对本届会议进行总结和分析。
1 会议总体情况
1.1 大会报告
本届大会,学者Fredrik Gustafsson,Simon Godsill和Ba Tuong Vo给大家带来了三场精彩的大会报告,报告内容代表着信息融合学科当今发展水平和未来潜在的突破性进展;另一场大会报告发言者Oliver Pink来自赞助商保时捷公司。
第一场大会报告是来自瑞典Linköping大学的Fredrik Gustafsson,题目是“恩格瓦尼项目:跟踪犀牛、护林员和偷猎者”。介绍他们从2013年开始针对野生动物安全,采用传感器融合技术支持在肯尼亚的恩格瓦尼建立犀牛避难所的一个研究项目,恩格瓦尼项目是一个小规模的试验计划,主要针对由肯尼亚野生动物服务组织提出的边境安全,项目由华盛顿特区斯廷森中心管理。研究的起因主要来自被偷猎者屠杀的犀牛数量不断增加,目标是通过技术创新为护林员提供数字化保护和安全技术。场景中主要跟踪和定位的对象包括:犀牛、护林员和偷猎者,采用的传感器包括:动物身上的GPS标记、雷达、监视相机、麦克风阵列、无线电台以及无人机。
第二场大会报告来自英国剑桥大学的Simon Godsill,题目是“随机行为和意图及多目标动态系统一体化技术”。报告主要阐述了高层交互和多目标跟踪方法和应用。报告对已有的多目标跟踪框架进行了扩展,通过动态交互实现对跟踪目标的自动学习,从而可以推理这些目标的可能意图。该模型的原则是基于动物行为分析。2018年国际信息融合大会将在英国举行,Simon将担任大会主席,Simon教授领导的团队在非线性滤波研究方面属国际上的一个重要分支。在非线性滤波中引入意图信息是当前研究热点。
第三场大会报告是来自保时捷公司的Oliver Pink,题目是“通往自动驾驶之路的挑战”。该报告重点关注周围环境的感知和传感器融合。
第四场大会报告来自澳大利亚的Curtin大学的Ba Tuong Vo,题目是“PHD滤波器:随机集方法的进展”。作者认为多目标系统是复杂的动态系统,其中大量的目标和其状态是未知的且随着时间随机变化。作者首次将概率假设密度滤波器引入到随机集框架中,推动了随机集方法的发展。很多专家认为PHD距离应用还有很长的路要走。
1.2 分会场论文
从发表的论文总体情况看,“扩展目标和群跟踪”方面文章最多,参见表1,这表明信息融合发展随着信息化的步伐加快,军用的色彩在逐步褪去,军民融合应用已经成为主流,技术更多地蕴含在人们的日常生活当中,比如:轨道车辆、车队、人的姿态、机器人等跟踪问题。可以预计随着研究工作的深入,相关的应用问题也会更多更复杂。
其次是数据互联、计算机视觉、PHD方法和非线性滤波等研究方向论文,这里PHD和非线性滤波很大一部分就与“扩展目标群跟踪”方面的应用相关,数据互联则作为跟踪中永恒的基础性问题方面,一直是大家关注的焦点,这是因为无论采用多么巧妙的方法,实际应用中错误关联在所难免。“计算机视觉”明显与融合应用中的另一类问题——“识别问题”紧密相关,美国国防部曾经认为战场所有问题的核心都可以归结为两点:相关和识别,这也是该问题越来越重要核心所在。
文章数量排第三的方向有:传感器管理、机器学习、蒙特卡罗方法、不确定推理、室内目标跟踪、信号处理和定向估计等,这些应用最大的特点是解决不确定性融合问题,环境(平台)不确定性、目标性状(种类、类型)的不确定性、各种干扰的不确定性等问题,智能化、敏捷化、人因化的处理方法是解决这类问题的核心。
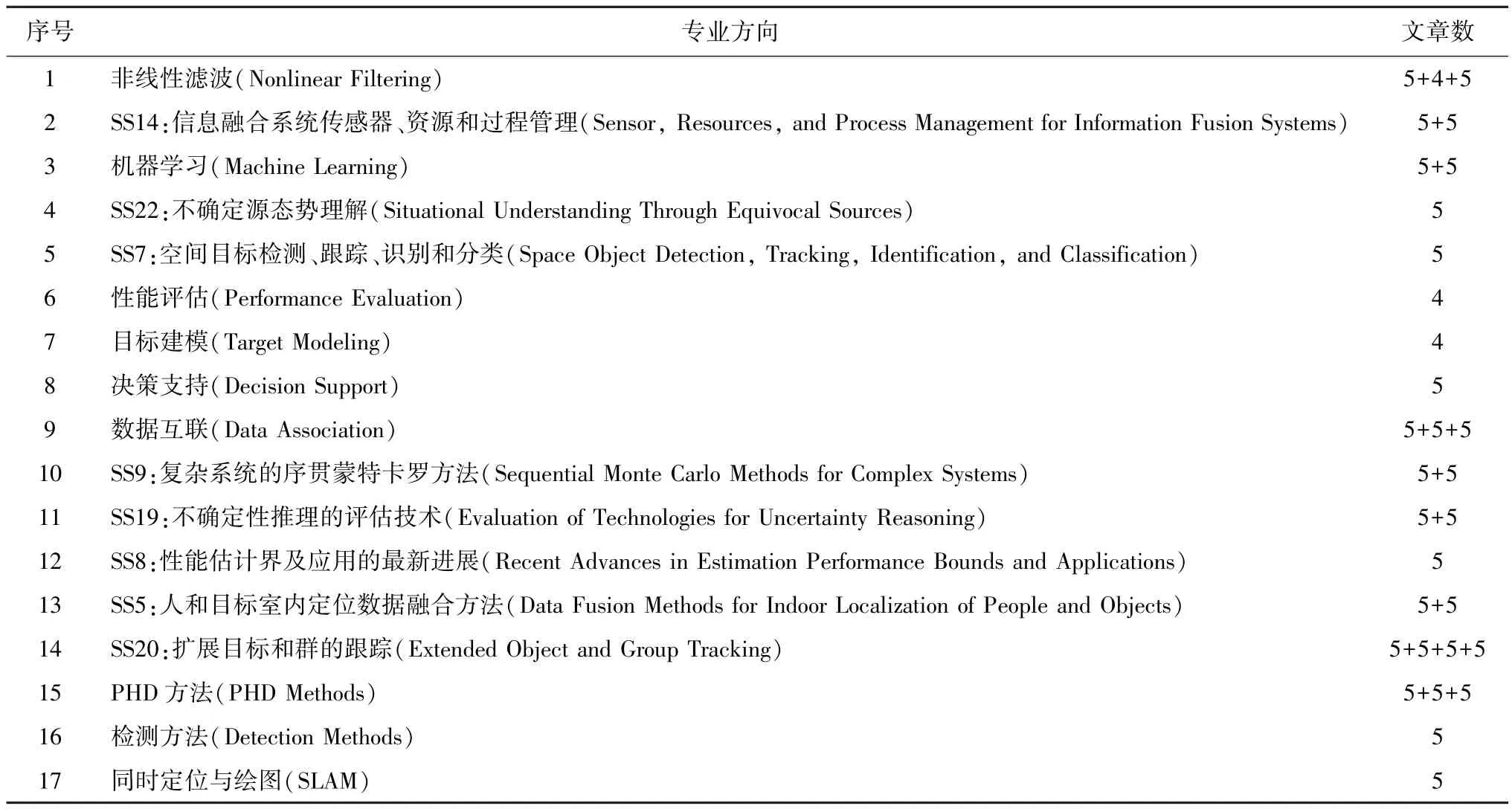
表1 分会场及其论文数

续表
1.3 重要学者论文分布
国际信息融合领域研究团队相对稳定,主要学术团体(代表人物)在本届大会上发表的文章情况见表2。早期由于该领域的敏感性,中国只有少量的研究人员参会,近几届,随着融合领域的扩展,军民融合得以更多地体现,大陆投稿、文章录用和参会人数有逐年递增趋势,其中几所高校如:成都电子科技大学、西北工业大学、西安交通大学、上海交通大学、四川大学、杭州电子科大、国防科大等学者坚持参会。工业部门参会人员较少,本届大会江苏自动化研究所派出多名技术人员出席。

表2 主要学术团体及其发表论文情况统计
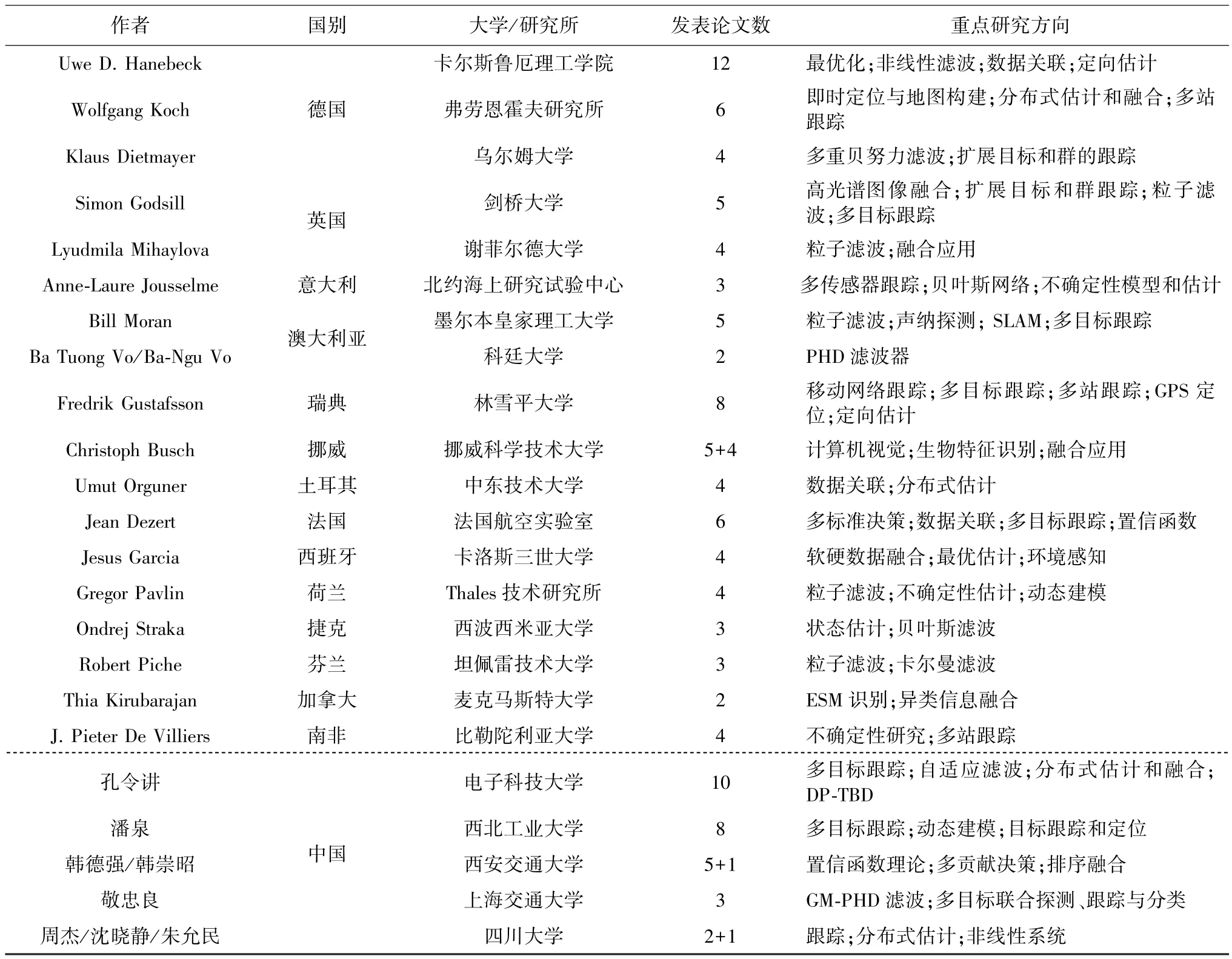
续表
从论文分布、分会场和特别专题会场主持人、获奖论文等综合统计分析,国际信息融合会议依旧被美国和欧盟学者掌控,特别是从研究方向覆盖的广度、深度和对问题的阐述,在该领域他们依旧占据明显的优势。
2 获奖论文
本次会议评选出了一篇最佳会议论文[4](Jean⁃Pierre Le Cadre Best Paper Award)和两篇提名论文[5⁃6],同时为鼓励在信息融合领域的青年研究工作者和科学家,会议最后评选出了一篇最佳学生论文[7](Tammy L. Blair Best Student Paper Award)和两篇提名论文[8⁃9]。
2.1 最佳论文及提名
2.1.1 一种基于模型数据驱动睡眠呼吸暂停探测方法
呼吸暂停分为中枢性呼吸暂停和阻塞式呼吸暂停(OSA),本文主要解决OSA探测问题。近年来,对OSA的探测主要采用纯数据驱动的方法,通过提取心电图(EGC)、氧饱和(SpO2)等生理信号特征,可以使用有监督的机器学习方法,将呼吸暂停数据与非呼吸暂停数据分类然后进行探测,这些纯数据驱动方法的性能在很大程度上取决于传感器数据的数量与质量,有很大的局限性。

奖励类型作者/研究机构题目最佳论文Sandeep Gutta/俄克拉荷马州立大学一种基于模型数据驱动睡眠呼吸暂停探测方法(Model⁃based Data⁃driven Approach for Sleep Apnea Detection)提名Roslyn A.Lau/澳大利亚国防科技集团一种基于存在模型的多目标跟踪结构化平均场方法(A Structured Mean Field Approach for Existence⁃based Multiple Target Tracking)提名Branko Risti/墨尔本皇家理工大学流行病爆发实时预报:2014/2015埃博拉案例研究(Real⁃time Forecasting of an Epidemic Outbreak:Ebola 2014/2015 Case Study)
文献[4]提出了一种新的阻塞性呼吸暂停(OSA)探测方法,将传感器量测数据和心肺系统模型参数结合起来,提升了探测的效果。文章在心肺系统数学模型的基础上引入了多元高斯过程(GP),以获取不同个体间的生理变化。同时,将可分离核函数的和作为多元GP协方差函数,并通过使GP边缘似然函数最大化来估计超参数。通过使用伪输入点构造近似GP边缘似然函数,进而估计模型超参数,可以有效地降低计算复杂度。本文将心率量测信号划分为连续不相交的等长区域,利用如下似然比检验实现OSA探测

其中γ是似然比检验的门限,信号检验区域长度为L,Zt={z1,z2,…,zt}是直到时间t的量测集合。仿真和实际数据均显示出新型OSA融合框架要优于纯数据驱动检测方法。
2.1.2 一种基于存在模型的多目标跟踪结构化平均场方法
多目标跟踪问题由于目标数目、空间距离和传感器量测的不确定性,使其成为一个富有挑战性的联合估计问题。目前,该问题比较成熟的算法是基于存在模型的联合集成概率数据互联算法(JIPDA),该算法的最大问题是:当目标数和量测数增加时,联合假设数的枚举为指数增长,为此研究人员提出了基于存在和关联条件概率的联合假设枚举方法、基于可视模型的概率多假设跟踪(PMHT⁃v)、概率假设密度滤波器、变分贝叶斯跟踪器(The Variational Bayes Tracker)等多种方法,但效果并不理想。
为解决这一难题,文献[5]提出了一种基于存在模型的多目标跟踪结构化平均场跟踪器(Structured Mean Field Existence⁃based Tracker,SMFET),SMFET是一种将概率模型表述为最优化问题的方法,旨在从一列不易处理的分布中得出诱导分布q,然后从q出发尽量逼近真实的后验分布p,用公式表示即为:

在多目标跟踪问题存在模型中,t时刻目标状态Xt、存在变量Et、关联变量At和量测Zt的联合分布为p(Xt,Et,At,Zt),文章使用结构化平均场方法将上述联合分布表示为:

其中诱导分布为:

接着将上述最优化问题转化为求解几个子问题,可以分别计算出已存在的目标状态目标存在概率和目标边缘关联概率。
该文的最大贡献是:提出了将存在模型和变分法相结合的结构化平均场多目标跟踪算法(SMFET),相对于传统多目标跟踪中将状态估计、数据关联和跟踪保持分开考虑的方法,该算法将这三者同时解决,不仅可以估计出下一时刻的目标状态,而且可以判断目标存在与否,解决了目标跟踪过程中目标突然出现或者消失的判断问题。同时,该算法解决了联合集成概率数据关联中联合假设枚举的复杂度问题,是解决多目标跟踪方法的一大进步,为多目标跟踪和群目标跟踪的研究,提供了新的解决方案和思路。
2.1.3 流行病爆发实时预报:2014/2015埃博拉案例研究
预测流行病期间的病例数量对于相关部门的规划和干预至关重要。一种方法是使用大规模的基于代理的仿真模型来模拟一个国家或地区的全部人口的日常活动。另一种方法是使用一种合适的结构化人口模型随机非线性滤波框架,然后再应用一个连续贝叶斯估计预测的泰勒方法,例如扩展卡尔曼滤波、集合卡尔曼滤波、粒子滤波。
文献[6]研究了一个随机非线性滤波框架用于估计并预测在2014/2015埃博拉病毒流行期间非洲西部Sierra Leone的病例数量。该框架提供了一种比基于代理的大规模仿真模型更简单可靠的方法。本文提出的方法基于随机SEIR(Susceptible,Exposed,Infected,Removed Compartmental Model)动态模型和由负二项分布模拟的似然函数进行粒子滤波。对粒子滤波进行逐渐修正以防止少数不规则数据引起的粒子损耗。为便于进行性能比较,本文提出将报告的病例数与估计病例数的如下巴氏距离作为性能指标。

其中p(κn|z1:n)可以用核估计来近似,使用高斯核可得

实验证明,仅使用报告中的累积病例数,并不能估计出潜伏期与感染期,但是,基于这两个参数的先验,则可能提供一个可靠的未来病例数的短期预测。
2.2 最佳学生论文及提名

奖励类型作者/大学题目最佳学生论文Lingyi Zhang/康涅狄格大学求解大m情形m-最优三维动态调度问题的方法(Approaches for Solving m⁃Best 3⁃Dimen⁃sional Dynamic Scheduling Problems for Large m)提名Filip Tronarp/芬兰阿尔托大学带非附加重尾噪声的非线性系统σ点滤波(Sigma⁃Point Filtering for Nonlinear Systems with Non⁃additive Heavy⁃tailed Noise)提名Gang Yao/康涅狄格大学基于迭代EMD的陀螺仪辅助视觉跟踪(Gyro⁃aided Visual Tracking Using Iterative Earth Mover's Distance)
2.2.1 求解大m情形m⁃最优三维动态调度问题方法
文献[7]提出了一种新的m-最优三维调度问题的有效解法,其中m可以很大(到104)。作者首先给出了一个通用的三维调度问题的严格数学描述,接着提出了一种两阶段解决方案:第一阶段,使用由Murty提出的m-最优搜索空间分解方法,将原问题空间分解为一系列子问题;第二阶段,通过放松三维规划问题的一个限制条件,同时使用拉格朗日松弛法将一个三维分配问题放松为二维分配问题,通过JVC(Jonker⁃Volgenant⁃Castanon)算法得出二维分配问题解的一个上界,之后重新加入约束条件将所得二维分配问题转化为一个单一交通规划问题或者拍卖问题,求出该问题的一个可行解和解下界,通过重复更新拉格朗日乘子,当问题可行解的上下界间隙很小时,则得到原问题的一个接近最优解的次优解。
与传统算法相比,新的两阶段方法,由于使用了Murty提出的m-最优搜索空间分解方法,可以在相对较短的时间得到原问题的大量解,拥有数量众多的可行解,在实际问题中无疑给决策者提供了巨大的便利;由此,拉格朗日松弛法的使用不仅精简了解空间,而且也加快了问题的求解过程。
总体上说,该文提出的新方法提高了求解该类问题的效率,同时为解决更为复杂的多维动态调度问题提供了新思路。
2.2.2 带非附加重尾噪声的非线性系统σ点滤波
状态估计在航空航天、智能手机、行人车辆位置推算以及室内导航等的传感器融合中有非常广泛的应用。学生氏t滤波器是为线性系统而设计的,但是这种架构也可以扩展到非线性系统。比如:有学者研究采用变分贝叶斯方法,解决非线性系统带加性噪声、高斯状态转换以及学生氏t观测问题。
文献[8]提出了一种非线性系统σ点滤波方法,其中符合学生氏t分布过程噪声和量测噪声,使系统具有非加性。文章使用仿真数据和行人航位推算试验的真实数据对算法进行了评估,并且同无迹卡尔曼滤波(UKF)与扩展学生氏t滤波(ESTF)进行比较,结果表明:在仿真试验中,非线性学生氏t滤波器能够更快修正状态估计误差,在行人航位推算试验中,σ点学生氏t滤波器的轨迹长度与真实距离最接近,同时其环路闭合偏差最小,说明σ点学生氏t滤波器有更好的滤波效果。
2.2.3 基于迭代EMD的陀螺仪辅助视觉跟踪
文献[9]提出了一种基于迭代EMD的陀螺仪辅助视觉跟踪算法。陆地移动距离(EMD,Earth Mover′s Distance)作为一种分布相似度测量指标,本身对目标外形的改变和光照情况的变化具有很强的适应性,这种性质决定了其在图像跟踪领域的应用价值,在视觉跟踪领域,EMD可以被用作在连续的视频序列中搜寻目标最优候选模板时的相似度度量。文章提出了一种单调收敛的迭代最优化算法,即在当前目标模板位置的基础上,计算出候选目标模板的EMD,并将其作为目标候选模板权重的函数,接着通过重复计算目标模板EMD的导数来搜寻目标新的位置,从而达到持续跟踪目标的目的。此外,成像设备放置在一个运动平台上,可能遭受到突然且较大的运动,使视频序列产生较大的帧间移动,为了保证跟踪算法持续收敛,文章使用一个与成像设备同步的陀螺仪信息来补偿成像设备发生的旋转和移动,完成了目标的稳定跟踪。
相对于传统陀螺仪辅助跟踪方法,本文提出的方法主要有以下优势:
1)将EMD作为视觉跟踪中目标和候选目标相似度测量的标准,并给出了具体使用方法,该相似度测量标准对由于光照条件、目标姿势和部分遮挡引起的改变具有很好的鲁棒性。文章将该算法与互信息跟踪器和基于核函数的均值漂移跟踪器(kernel⁃based Mean⁃shift tracker)相比较,验证了该方法在光照变化时跟踪目标的准确性。
2)使用陀螺仪测量数据补偿成像设备产生的镜头抖动、倾斜和旋转。即在补偿计算了成像设备自身运动的基础上,再利用iEMD(iterative Earth Mover's Dis⁃tance)算法进行目标视觉跟踪,确保了iEMD算法收敛性,同时也提供了一种在实际情况下更有效运行的跟踪器。
3 数据融合中的不确定性
1961年卡尔曼提出了一种新的滤波估计方法,之后被命名为卡尔曼滤波器,该方法在航空、航天、船舶及其相关的信号处理、信息处理、自动控制等领域的推动作用几乎超越其它任何方法。同时,卡尔曼滤波器对于信息融合领域的工作者无疑是经典和基础,其影响力足以与德国科学家高斯提出最小二乘估计并列。
国际著名信息融合专家David L.Hall以著述多而闻名,他撰写的论文和专著对数据融合问题、理论和方法阐述深入浅出,几乎成为这个时代数据融合领域的代言人,绝大部分初学者都是在他的文章引导下进入该领域。为此,本届会议上,美国空军研究实验室Erik Blasch等撰写文章[10],回顾Hall主要贡献和观点(这也说明Hall对美国军方的影响力),从最早参加创建JDL模型,底层信息融合(Low⁃Level Information Fusion,LLIF)包含滤波、估计和目标跟踪和分类的控制,高层信息融合(High⁃level Information Fusion,HLIF)目标是管理传感器、用户和任务;最新JDL模型中增加了一个第五层——用户精炼,强调达成用户的需求。这些模型演化进程中,Hall起到了非常关键的作用。图1是最新的JDL模型[10]。

图1 包含用户精炼层的JDL模型[10]
上下文信息包括地理空间情报(比如:道路网路、有益的位置)、目标类型(例如:车辆、船队)、文化因素(比如:多媒体、社交网络),以及任务的目标等,在其中任何一种情况,上下文均能为目标跟踪和分类实时收集信息提供指导,同时,来自文本报告的目标意图分类信息也可以与来自多个观测源的目标跟踪和识别结果进行关联。图2中突出强调了上下文对于融合的作用。
Hall的重要贡献包括:1)对JDL层级的透彻理解和分析;2)数据融合软件和工具调查和综述;3)数据融合的组织应用;4)信息融合培训和教学;5)数据融合的设计和前程中的实际问题;6)聚焦用户(认知)难题,5级融合;7)探索硬⁃软数据融合方法;8)近期在不确定性表示工作组评估技术(Evaluation of Technologies for Uncertainty Representation Working Group,ETURWG)有关不确定性融合方面的讨论。
Hall总结出了数据融合的几个所谓不足(圈套):1)融合永远不能取代好传感器;2)下层的处理无法弥补上层处理的差错(失效);3)如果不同性能传感器获取的信息运用不正确,传感器融合将导致性能下降;4)不存在所谓的数据融合的魔术般/黄金算法;5)永远不会有足够的训练数据;6)数据融合系统价值的量化非常困难;7)融合不是一个静态的处理。
数据融合的不足类似于ETURWG工作组对传感器融合的评估准则的讨论,图3给出了一个不确定性表示和推理的评价框架(Uncertainty Representation and Reasoning Evaluation Framework,URREF)概念。很多观点Hall在10多年前就已经提出。

图2 信息融合的层级[10]

图3 URREF本体,版本2[10]
Hall给出了避免数据融合不足的方法:1)通过对传感器技术透彻分析,建立观测现象与需求推断之间的映射关系;2)检查传感器数据的上下文为传感器处理智能化选择算法;3)通过系统性算法选择和快速原型工具实现实际数据集的均衡;4)采用混合模式识别的方法克服训练数据不足的局限性;5)性能指标和效能指标必须能定义和估计数据融合系统的可用性;6)智能化4级处理必须能够监控和改善整体的数据融合处理过程。
图4描述了基于效果的行动(effects⁃based opera⁃tions,EBO)架构中的多智能数据信息融合,左边给出数据融合信息组(Data Fusion Information Group,DFIG)过程模型中的层级,涉及认知域、信息域和物理域。物理域包括数据刻画(L0)和目标评价(L1),信息域通过传感器管理(L4)在物理域数据的基础上对态势(L2)和影响(L3)进行估计,认知域包括用户(L5)和任务(L6)的精炼过程。

图4 采用基于效果推理的信息融合[10]
4 未来展望
Hall在1997年著名的综述[11]中,将数据融合定位为一类特定的工程应用问题。近年来,随着传感器、互联网、无线通信等技术的发展,数据融合的研究更多关注的是人们的日常应用,如公共安全、野生动物保护、无人驾驶汽车、机器人控制、金融行情分析、社会经济发展预测等实际日常问题。而“与国防相关的信息融合技术研究和开发将越来越呈现‘附带性’研究的特性[12],…,”但领域的扩展必然带来更多不确定性。
由此,数据融合领域一些基础性难点问题解决,也显得尤为迫切,比如:非线性滤波、扩展目标跟踪、基于上下文的信息融合等。
1)非线性滤波:Simon教授解决思路是,在目标动态模型中加入行为交互和未观测意图,采用数字化贝叶斯滤波策略,运用粒子滤波和马尔科夫链蒙特卡洛方法加以实现。
2)扩展目标跟踪:随着雷达分辨率的提高,目标回波的不是一个点而是“云团”,此时,传统意义下单个检测对应一个目标的假设不再成立,这就是所谓扩展目标跟踪(Extended Target Tracking,ETT)。Koch[13]提出了一种解决扩展目标跟踪问题常用可计算的框架,通过将目标假设成一个椭圆扩展,从而采用随机矩阵建立目标椭圆扩展模型,作为附加状态变量进行估计和跟踪。这里,目标的动态状态采用高斯分布建模,而目标椭圆扩展采用逆Wishart分布模型。实际上,回波的大小与传感器的分辨率精度和目标尺寸有关,即使是一般的传感器,在跟踪群目标时,也会遇到类似问题。在该领域传感器分辨率建模、多传感器扩展目标跟踪等问题是当前研究的热点。
3)基于上下文的信息融合:在地面目标跟踪、海上监视和基于位置的服务(Location⁃Based Services,LBS)等应用中,目标的行为和数据源的特征以环境(如:地形类型和天气条件)作为先决条件,甚至决定他们的逻辑过程及其与其它实体交互的方式。因此,上下文被认为是改善跟踪性能的关键组成部分。一种方法是将上下文知识表示为静态或动态变量,从而与非线性扩展卡尔曼滤波或粒子滤波集成。文献[14]认为上下文信息是描述实体行为的决定性要素;外部和内在(Ex⁃ternal and Internal)上下文差异之于描述实体行为的重要性。
本届Fusion2016的会议地点位于内可河畔的海德堡会议中心,是一座19世纪晚期建筑,外表古朴与古镇融为一体;内部虽经装修,墙壁和内饰奢华亮丽,闪耀着哥特式建筑特有的艺术光辉。海德堡古城融合了千年风雨,依然弥久芬芳,信息融合的未来亦如此。
[1] http:∥www.fusion2016.org[EB/OL].
[2] http:∥www.inforfusion.org[EB/OL].
[3] http:∥www.fusion2017.org[EB/OL].
[4] Sandeep Gutta,Qi Cheng,Hoa D.Nguyen,Bruce A. Benjamin.Model⁃based Data⁃driven Approach for Sleep Apnea Detection.[C]∥Proceedings of 19th International Conference on Information Fusion,Heidelberg,Germany,2016,7:828⁃835.
[5] Roslyn A.Lau,Jason L.Williams.A Structured Mean Field Approach for Existence⁃based Multiple Target Track⁃ing.[C]∥Proceedings of 19th International Conference on Information Fusion,Heidelberg,Germany,2016,7:1111⁃1118.
[6] Branko Ristic,Peter Dawson.Real⁃time Forecasting of an Epidemic Outbreak:Ebola 2014/2015 Case Study.[C]∥Proceedingsof19thInternationalConferenceon Information Fusion,Heidelberg,Germany,2016,7: 1983⁃1990.
[7] Lingyi Zhang,David Sidoti,Krishna R.Pattipati,David Castanon.Approaches for Solving m⁃Best 3⁃Dimensional Dynamic Scheduling Problems for Large m.[C]∥Pro⁃ceedings of 19th International Conference on Information Fusion,Heidelberg,Germany,2016,7:53⁃58.
[8] Filip Tronarp,Roland Hostettler,Simo S¨arkk¨a.Sigma⁃Point Filtering for Nonlinear Systems with Non⁃Additive Heavy⁃tailedNoise.[C]∥Proceedingsof19th International Conference on Information Fusion,Heidel⁃berg,Germany,2016,7:1859⁃1866.
[9] Gang Yao,Michael Williams,Ashwin Dani.Gyro⁃aided Visual Tracking Using Iterative Earth Mover's Distance.[C]∥Proceedings of 19th International Conference on In⁃formationFusion,Heidelberg,Germany,2016,7:2317⁃2323.
[10]Erik Blasch,Paulo C.G.Costa,J.Pieter De Villiers,et al.Pragmatic Data Fusion Uncertainty Concerns:Tribute to Dave L.Hall.[C]∥Proceedings of 19th International Conference on Information Fusion,Heidelberg,Germany,2016,7:472⁃479.
[11]Hall,D.L.Llinas J.An introduction to multisensor data fusion[J].Proceedings of the IEEE.,1997,85(1):6⁃23.
[12]KochW.TrackingandSensorDataFusion—Methodological Framework and Selected Applications[M]. Science Business Media,2013.
[13]Koch JW.Bayesian approach to extended object and cluster tracking using random matrices[J].IEEE Transac⁃tions on Aerospace and Electronic Systems,2008,44(3):1042⁃1059.
[14]Snidaro L,Garciaj,Linasj.Context⁃based information fu⁃sion:a survey and discussion[J].Information Fusion,2015,25:16⁃31.
Review of 19thInternational Conference on Information Fusion and its Awarded Papers
HE Jia⁃zhou,MA Ji⁃wei,WANG Yu⁃huai,An Jin
(Jiangsu Automation Research Institute,Lianyungang 222061,China)
This paper summarizes the plenary talks and the regular reports given in Fusion2016(the 19thInternational Con⁃ference on Information Fusion).Through the statistical analysis of the papers presented by the several famous fusion teams,some focus areas and issues are put up and investigated.Then,we review the Best Student Award papers together with their Runners⁃up,which recognize excellences among researchers and scientists in information fusion in the last year,and general⁃ly accepted by the conference award committee.Finally,we consider the uncertainty of the high level information fusion,and we also discuss some developments and trends of several prosperous areas.
fusion2016;awarded papers;JDL model;nonlinear filtering;extended object tracking;context⁃based informa⁃tion fusion
E911;TP273
A
10.3969/j.issn.1673⁃3819.2016.06.028
1673⁃3819(2016)06⁃0135⁃10
2016⁃11⁃03
2016⁃11⁃17
何佳洲(1966⁃),男,江苏丹徒人,博士,研究员,研究方向为信息融合。
马继伟(1992⁃),男,硕士研究生。
王昱槐(1989⁃),男,硕士研究生。
安 瑾(1981⁃),男,硕士,高级工程师。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
电子制作(2019年9期)2019-05-30
时代英语·高一(2019年1期)2019-03-13
电子制作(2018年16期)2018-09-26
电子制作(2018年9期)2018-08-04
鄱阳湖学刊(2018年3期)2018-07-28
鄱阳湖学刊(2016年5期)2016-11-15
火控雷达技术(2016年3期)2016-02-06