An Adaptive Integrated Guidance and Control Design against Ground Fixed Targets
2016-12-20 08:07CHENBoLIAOFeiJIHaibo
现代雷达 2016年3期
CHEN Bo,LIAO Fei,JI Haibo
(1. Department of Automation, University of Science and Technology of China, Hefei 230027, China)(2. Department No.1, Bengbu Naval Petty Officer Academy, Bengbu 233012, China)
·控制技术·
An Adaptive Integrated Guidance and Control Design against Ground Fixed Targets
CHEN Bo1,2,LIAO Fei1,JI Haibo1
(1. Department of Automation, University of Science and Technology of China, Hefei 230027, China)(2. Department No.1, Bengbu Naval Petty Officer Academy, Bengbu 233012, China)
An adaptive integrated guidance and control (IGC) approach is proposed based on backstepping method and input-to-state stability for homing missiles against ground fixed targets with actuator failures. A model of the IGC system in the pitch plane is formulated. The IGC laws are designed via backstepping method, which can provide desired impact attitude angle to hit the fixed targets in the presence of external disturbances and actuator failures. In order to deal with the uncertainties, an adaptive control law is developed. The numerical simulation results demonstrate the effectiveness of the proposed design scheme.
adaptive; integrated guidance and control; ground fixed targets; actuator failures
陈 勃1,2,廖 飞1,季海波1
(1. 中国科学技术大学 自动化系, 合肥 230027; 2. 海军蚌埠士官学校1系, 安徽 蚌埠 233012)
0 Introduction
Guidance and control systems of homing missiles are traditionally designed separately followed by combining them. However, accuracy requirements of missiles lead to intense maneuvering during the last phase of the engagement, thus violating the spectral separation assumption of the conventional two-loop design. This has led to the birth of integrated guidance and control (IGC) designs that demonstrate superior hitting accuracies by accounting for the coupling between the kinematics and dynamics of the problem.
IGC scheme was introduced by Williams et al[1]firstly and was addressed in application to a homing missile by Lin and Yueh[2]. Since then, IGC design has become an emerging trend in missile technology and beendeveloped by being combined with different control theories.Palumbo et al[3]used the state-dependent Riccati equation to deal with a more comprehensive model characterized by nonlinear motion in three dimensions; Menon and Ohlmeyer[4]used the feedback linearization method associated with the linear quadratic regulator technique to formulate a nonlinear IGC laws; Sharam and Richards[5]used an IGC design for homing missiles based on the backstepping strategy; Shkolnikov et al[6]and Shima et al[7]introduced an IGC design by using sliding mode control; Choi and Chwa[8]proposed an adaptive nonlinear guidance law considering target uncertainties and control loop dynamics by way of sliding mode control approach; still, there were other interesting and effective methods, such as subspace stabilization method[9]andθ-Dmethod[10]; Guo and Zhou[11]adoptedH∞control method to design an adaptive nonlinear control law; in[12], the missile attitude angles were considered as state variables and the linear quadratic regulator (LQR) was adopted for designing the IGC law; more recently, the input-to-statestability is introduced to deal with the guidance law design sign problem[13-15]. Therefore, it stands to reason that the IGC system design will be one of the most noticed subjects in missile technology. However, in the guidance law design field against the ground fixed targets, there exists another important problem encountered in practice for complex systems, that is control failures. Control failures include bias, loss of effectiveness or thrusts failures, they can cause control system performance deterioration, and lead to instability and even catastrophic accidents. Therefore, fault-tolerant control (FTC) is introduced to increase availability by specifically designing control algorithms capable of maintaining stability and performance despite the occurrence of faults. In order to increase the safety and reliability of system[16], FTC is used properly to manage the redundancies of control and guidance law system in the event of component failures.
This paper focuses on designing the scheme of IGC for homing missiles against ground fixed targets. To achieve successful interception and better killing effects, impact attitude angle is required. The exact contributions of this paper are concluded as follows. First, an integrated guidance and control error model is given, and the actuation effectiveness phenomenon is described. Compared with existing approaches used to deal with the integrated guidance and control design problem, ground targets and actuator failures are explicitly taken into consideration. Next, FTC guidance laws based on input-to-state stability and backstepping for ground targets are proposed, which not only are robust against external disturbance, but also accommodate actuator failures. Finally, the backstepping approach is utilized to design the integrated guidance and fault-tolerant control (IGFTC) for missiles against ground fixed targets to make the state variables be input-to-state stable with respect to uncertainties and actuator failures. An adaptive law is designed to estimate the unknown parameter with respect to the actuation effectiveness components. And the stability analysis shows that the interception with desired impact angle can be gotten with the proposed law, and the IGFTC scheme enables stability and performance of the overall system.
The paper is organized as follows. Section 1 formulates the model of the IGC system in the pitch plane. The process of designing adaptive IGFTC law is given in Section 2 and the numerical simulation results and analysis are presented in Section 3. Finally, conclusions are given in Section 4.
1 Missile Dynamics
The model derivation of the IGC system in the pitch plane is presented in this section.
Linearized missile dynamics in the pitch plane is described as follows[17]
(1)
whereαis the attack angle,ωis the angular pitch rate,Pis the thrust of the missile,Qis the dynamic pressure,Sis the aerodynamic reference area,cαis the lift force derivative with the angle of attack,mis the missile mass,Vis the velocity of the missile,Lis the reference length,Jzis the moment of inertia aboutz-axis,δzis the deflection angle for pitch control,mω,mα,mδrepresent the pitch moment derivatives with respect to the angle of attack, the nondimensional angular pitch rate and the deflection angle for pitch control respectively,Δα,Δωare unknown bounded uncertainties.

Fig.1 Angular relationship
As shown in Fig.1, dynamics of the range along the light-of-sight (LOS) and the LOS angle are given by
(2)
whereris the range along the LOS,qis the LOS angle andθis the flight path angle of the missile. By transforming Eq.(2), we get
(3)
As shown in Fig.1, the missile's pitch attitude angle is related with the angle of attack and path angle as follow
ϑ=α+θ
(4)
We may assume that the angle of attack is very small at the engagement time, so it is easy to obtain that
ϑd≈θd
(5)
where ϑdandθdare the missile's desired impact attitude angle and the desired impact path angle. The following equation and inequality also hold in the terminal game
(6)
We can obtain that
qd=θd
(7)
Applying Eq.(5) into Eq.(7), we get
qd+ϑd
(8)
Hence, the desired impact attitude angles in the interception endgame can be satisfied by the constraint of the desired impact LOS angle. Letσ=q=qd, then differentiation yields

(9)
According to the analysis above, we obtain the model of IGC close loop of the pitch plane as follows
(10)

ThispaperaimstodesignanappropriateIGClawforhomingmissilesagainstgroundfixedtargets,sothatthemissilecanhitthetargetaccuratelywithadesiredimpactattitudeangle,andthestabilityoftheoverallsystemisalsorequired.Wesupposethatthespeedisconstantandthemissileaimsatthetargetbyadjustingitsflightdirection,andeventuallyzeroingtheLOSrateleadstosuccessfulinterception.TheterminalimpactattitudeangularconstraintcanbesatisfiedbythenullLOSangleerrorσ=q=qd.
2 Adaptive IGFTC Design
ThissectionpresentstheprocessofdesigningtheIGClawforthesystemdescribedbyEq.(10).Firstly,atransformationisemployed
(11)
The IGC system given by Eq.(10)can be transformed to the equivalent system as follows
(12)
The fault-tolerant model is
(13)
whereτis the actuation effectiveness components and 0<τ≤1. It assumes that the inequality 0<τm≤|τ|≤1 holds. 0<τ≤1 implies the situation in which the control partially fails.τ=0 means the actuator completely fails. When this case appears, it will make a complete failure of target interception. The control objective is to design an ISS-based fault-tolerant guidance law for interception such that the law keeps the LOS rate within a small neighborhood of zero. Then an IGFTC law is designed for system by recursive application of backstepping.
The basic concept of input-to-state stability is introduced as follows:


(14)
Eq.(14) guarantees that for any initial statex(t0) and any bounded inputu(t), the statex(t) will be bounded. Furthermore, with a zero inputu(t) (usually regarded as a disturbance input), the system will be uniformly asymptotically stable.

(15)


(16)

Proof.ConsidertheequivalentsystemEq.(13),choosevisualcontrolsasfollows
(17)
(18)
where 0<μ≤τmandδ>0. The derivation ofValong the trajectories of system Eq.(13) is given by
(19)
Consider the inequalities
(20)
Applying the inequalities into Eq.(19), obtain


(21)
Substituting the visual control law, we have
(22)
Define
(23)
and
(24)
For 0<μ<τm≤τ≤1,consider the worst caseτ=μ,obtain
(25)
(26)
Substituting the adaptive law
(27)
into Eq.(26),we get
(28)
Consider the inequality
(29)
We get
(30)

(31)
Multiplying both sides by e2kt, then integrate them over [0,t], we get

(32)

(33)


3 Simulation Results
Inthissection,thefeasibilityandapplicabilityoftheproposedIGClawisverifiedbythenumericalsimulationsforsomepassivehomingmissile'snonlineardynamicmodelinthepitchplane.Theabbreviationsofunitsusedinthissectionaremformeter,sforsecondandradforradian.

Fig.2 LOS rate ωq

Fig.3 Pitch rate ω
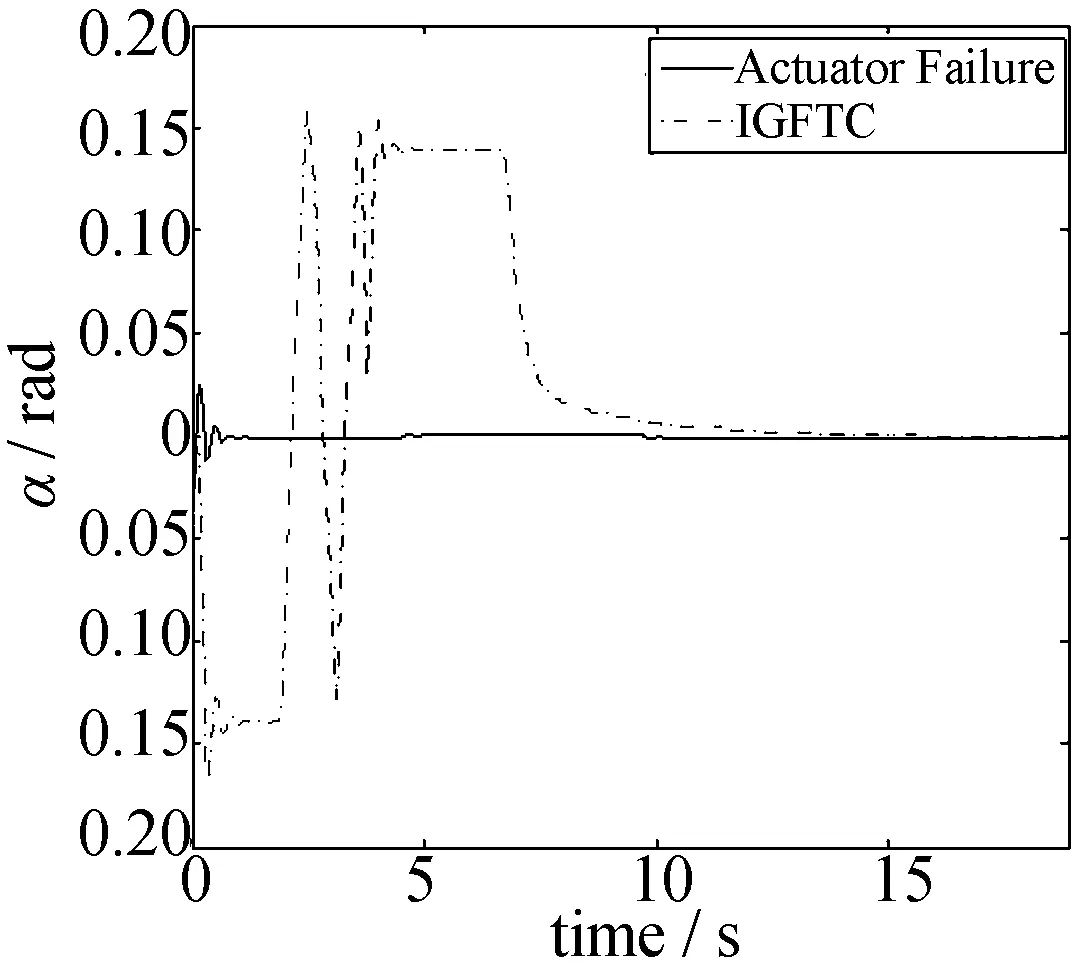
Fig.4 Angle of attack α
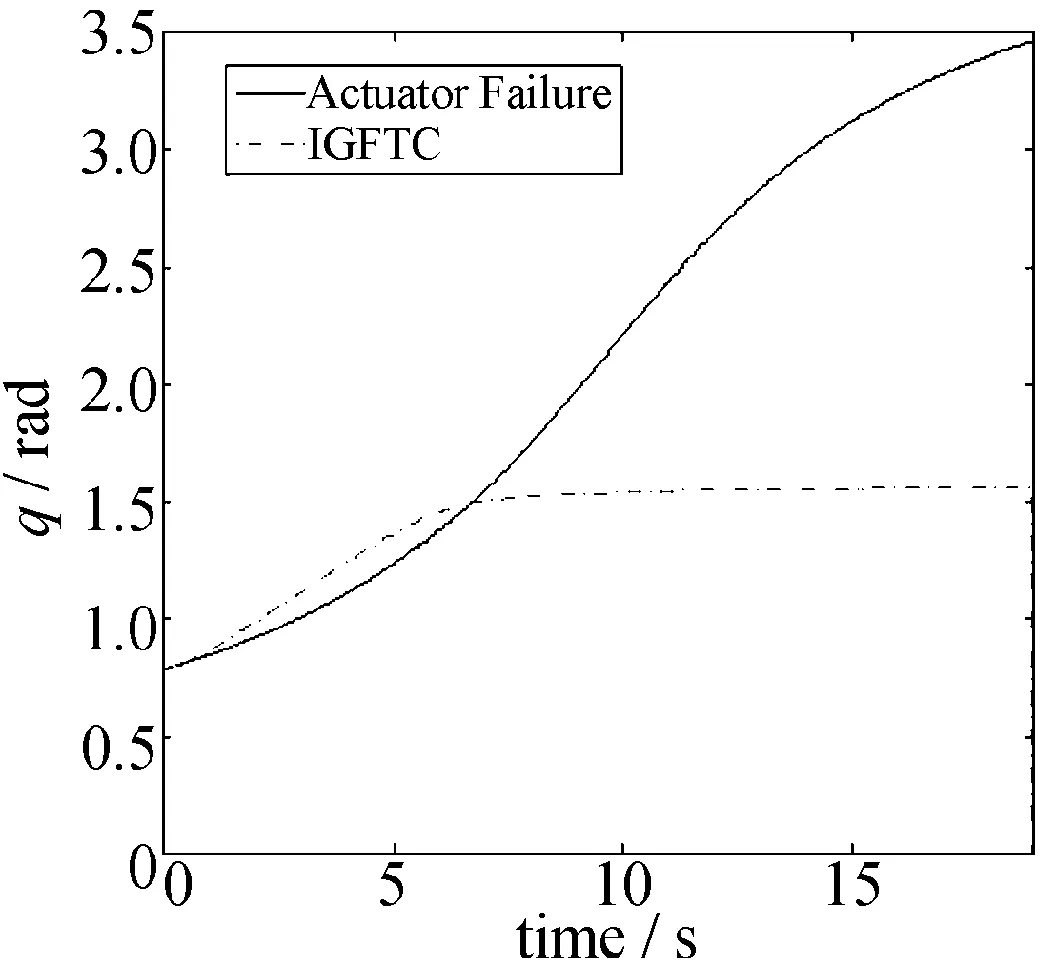
Fig.5 LOS angle q

Fig.6 Relative range r
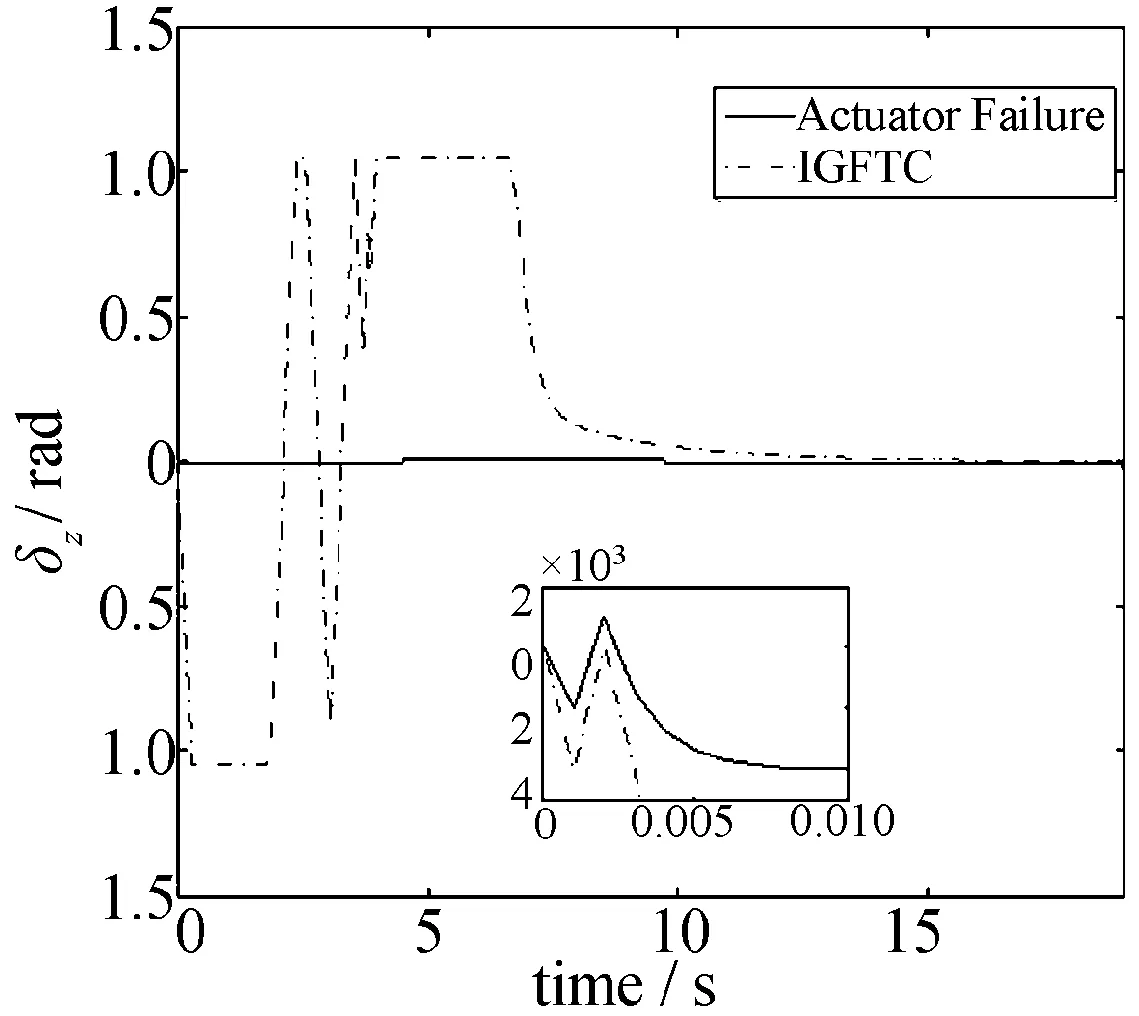
Fig.7 Deflection angle δz
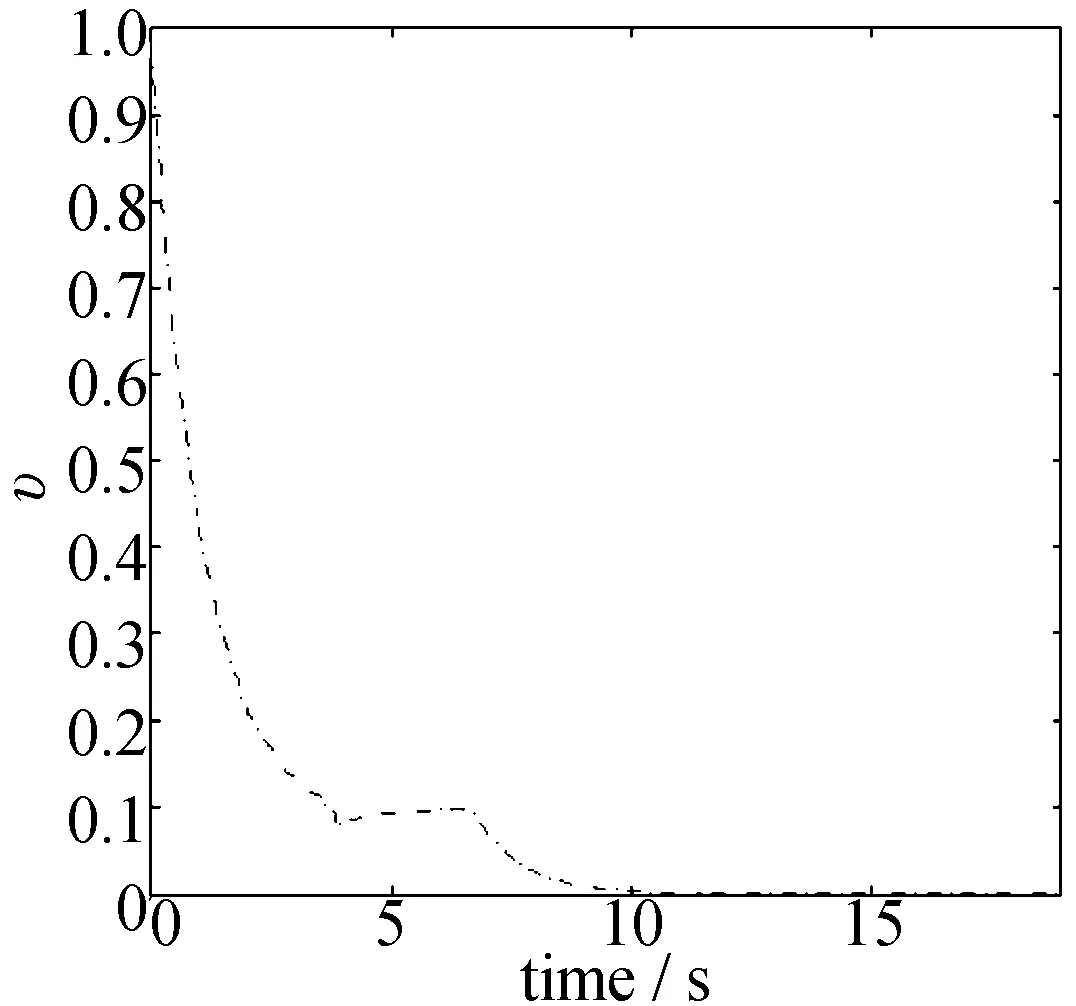
Fig.8 Adaptive parameter estimate v
4 Conclusions
This paper develops a scheme of IGC for homing missiles against ground fixed targets to improve the performance of the system with respect to external disturbances and actuator failures. An integrated model of guidance and control loop in the pitch plane is firstly formulated and the adaptive control law is designed by adopting the backstepping method and input-to-state theorem. Numerical simulation results have validated the usefulness of the IGC design to the homing missiles.
[1] WILLIAM D E, RICHMAN J, FRIEDLAND B. Design of an integrated strapdown guidance and control system for a tactical missile[C]// Proceedings of the AIAA Guidance and Control Conference. Catlinburg: ARC, 1983: 57-65.
[2] YUEH W R, LIN C F. Optimal controller for homing missiles[J]. Journal of Guidance, Control and Dynamics, 1985, 8(3): 408-411.
[3] PALUMBO N F, JACKSON T D. Integrated missile guidance and control: a state dependent Riccati differential equation approach[C]// Proceedings of the 1999 IEEE International Conference on Control Applications. Kohala Coast, HI: IEEE Press, 1999: 243-248.
[4] MENON P K, OHLMEYER E J. Nonlinear integrated guidance control laws for homing missiles[C]// AIAA Guidance, Navigation and Control Conference and Exhibit. Montreal: ARC, 2011: 6-8.
[5] SHARMA M, Richards N. Adaptive integrated guidance and control for missile interceptors[C]// AIAA Guidance, Navigation and Control Conference and Exhibit. Rhode Isaond: ARC, 2004: 1-15.
[6] SHKOLNIKOV I, SHTESSEL Y, LIANOS D. Integrated guidance-control system of a homing interceptor: sliding mode approach[C]// AIAA Guidance, Navigation and Control Conference and Exhibit. Montreal: ARC, 2001.
[7] SHIMA T, IDAN M, GOLAN O M. Sliding mode control for integrated missile autopilotguidance[J]. Journal of Guidance Control & Dynamics, 2006, 29(2): 250-260.
[8] CHOI J Y, CHWA D Y. Adatpive nonlinear guidance considering target uncertainties and control loop dynamics[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003,39(4): 1139-1143.
[9] TOURNES C, WILKERSON P. Integrated terminal guidance and automatic pilot using subspace stabilization[C]// AIAA Guidance, Navigation and Control Conference and Exhibit. Montreal: ARC, 2001.
[10] XIN M, BALAKRISHNAM S N, OHLMEYER E J. Integrated guidance and control of missiles withθ-Dmethod [J]. IEEE Transactions on Control Systems Technology, 2006, 14(6): 981-992.
[11] GUO J G, ZHOU J. Integrated guidance-control systems design based onH∞control[C]// 2010 International Conference on Electrical and Control Engineering. Wuhan, China: IEEE Press, 2010: 1204-1207.
[12] YUN J, RYOO C K. Integrated guidance and control law with impact angle constraint[C]// 2011 11th International Conference on Control, Automation and Systems. Gyeonggi-do: IEEE Press, 2011: 1239-1243.
[13] YAN H, JI H B. Integrated guidance and control for dual-control missiles based on small-gain theorem[J]. Automatica, 2012, 48(10): 2686-2692.
[14] WEICHENG M A, HAN Y A N, HJI H B. Integrated guidance and control against ground fixed targets based on backstepping and input-to-state stability[C]// 2012 International Conference on Mechatronics and Automation (ICMA). Chengdu: IEEE Press, 2012: 321-326.
[15] LIAO F, JI H, XIE Y. A novel three-dimensional guidance law implementation using only line-of-sight azimuths[J]. International Journal of Robust and Nonlinear Control, 2014, 25(18): 3679-3696.
[16] DUCARD G J J. Fault-tolerant flight control and guidance systems: practical methods for small unmanned aerial vehicles[M]. Germany: Springer, 2009.
[17] HOU M Z, DUAN G R. Integratied guidance and control of homing missiles against ground fixed targets[J]. Chinese Journal of Aeronautices, 2008, 21(2): 162-168.
[18] KHALIL H K. Nonlinear systems[M]. 3rd ed. New Jersey: Prentice-Haill, 2002.
陈 勃 男,1984年生,硕士研究生。研究方向为导航制导与控制。
廖 飞 男,1987年生,博士研究生。研究方向为导航制导与控制。
季海波 男,1964年生,教授,博士生导师。研究方向为非线性控制、导航制导与控制等。
国家自然科学基金专项资助项目(61273090)
陈勃 Email:447001023@qq.com
2015-10-21
2015-12-22
一种针对地面固定目标自适应导控一体化设计
基于反步设计法和输入-状态稳定理论, 针对地面固定目标,提出了一种执行器失效时自适应导引控制一体化(IGC)设计方法。首先,描述了一体化导引控制的数学模型;然后,基于反步设计法提出一种导引控制一体化算法,该算法能够在额外扰动和执行器失效的情况下以设计的冲击姿态角打击地面固定目标;同时,提出一种自适应律来处理由于执行器部分失效所引起的不确定性。仿真结果表明该算法是行之有效的。
自适应;导引控制一体化;地面固定目标;执行器失效
TN957.52
A
1004-7859(2016)03-0078-08
10.16592/ j.cnki.1004-7859.2016.03.017
猜你喜欢
科教新报(2023年25期)2023-07-10
科教新报(2020年2期)2020-02-14
河北书画研究(2019年1期)2019-09-25
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
小溪流(画刊)(2017年9期)2017-10-12
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
中国卫生(2015年10期)2015-11-10
中国卫生(2015年10期)2015-11-10