一种基于改进BP神经网络预测T/R组件温度的方法
2016-12-21 10:42李硕
电子技术与软件工程 2016年20期
关键词:BP神经网络
李硕

摘 要 目前武器装备故障预测与健康管理技术(PHM)在航空航天领域得到飞速发展,陆军装备应用PHM尚处于起步阶段。本文针对有源相控阵雷达前端T/R组件对温度有较高要求这一特性,建立基于动量因子和自适应学习率的BP神经网络预测模型,利用传统BIT系统采集的T/R组件温度数据,在MATLAB平台进行组件温度预测仿真试验,通过对比真实温度值,验证预测模型的可信度,进一步完善传统雷达温度监控功能,对预测组件故障起到一定参考作用。
【关键词】BP神经网络 T/R组件 温度预测模型
T/R组件是构成有源相控阵雷达前端的关键部件。T/R组件的性能在很大程度上决定了有源相控阵雷达的性能。T/R组件通常由复杂的电子线路、电子元器件构成,对温度有较高的要求,当组件温度超出正常范围,便会对各级功率放大器及各类电子元器件造成损伤,从而引起连锁反应。
目前国内外在设计阶段都已经对阵面进行有效冷却设计,并能监测组件温度。但往往受到散热系统故障、组件自身故障等突发状况,组件温度发生异常,故障已经发生。而传统组件温度监测系统即使检测到温度超出警戒,但已错失发现可能出现故障的时机,元器件已经受到损伤。因此,要完善现有的温度检测功能避免此类事件的发生;通过建立合适的模型,在温度到达警戒值之前,利用历史温度数据,对T/R组件温度进行预测,及时向雷达操作人员提供温度预警,以便采取预防措施。
用于预测的方法多种多样:
(1)时间序列预测,将历史数据进行函数拟合,反映未来的某一时刻的预测值。
(2)数学模型预测:通过建立数学模型,建立输入输出映射关系,反映未来某一时刻的预测值。
(3)智能预测:基于历史数据,利用人工智能方法进行预测。其中,BP神经网络具有良好非线性拟合能力,并且可以对预测精度,误差进行人为干预,在解决本文这类预测问题中有较好应用前景。
1 BP神经网络
1.1 基本原理
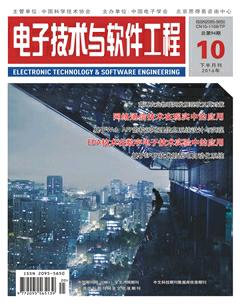
BP网络结构如图1所示。其中,xj表示输入层第j个节点的输入,j=1,2...M;ωi,j表示隐含层第i个节点到输入层第j个节点之间的权值;θi表示隐含层第i个节点的阈值;Ф表示隐含层的激励函数;ωk,i表示输出层第k个节点到隐含层第i个节点之间的权值,i=1,2...q;αk表示输出层第k个节点的阈值,k=1,2...L;Ψ表示输出层的激励函数;οk表示输出层第k个节点的输出。
1.2 基本算法
BP网络通过学习过程对网络的权值和阈值进行调整,达到对任一输入都能得到期望输出的目的。学习过程是由输入信号的正向传播和误差信号的反向传播组成的。正向传播过程是指:输入信号从输入层传给隐含层,经隐含层处理后传给输出层,再经输出层处理后产生输出信号。若正向传播过程所得到的输出值与期望的输出值有误差,则网络转为误差反向传播过程。误差反向传播过程是指:从输出层开始将误差信号逐层传送到输入层,并同时修改各层神经元的联结权值和阈值,使误差信号达到最小。重复上述过程 直至得到期望输出值。基本BP神经网络算法包括两个方面:信号的正向传播和误差的反向传播。
1.3 经典BP神经网络的缺陷及改良
BP神经网络算法的实质是求解误差函数的最小值问题,由于它采用非线性规划中最速下降方法,按误差函数的负梯度方向修改权值,因而通常存在以下问题:学习效率低,收敛速度慢,易陷入局部极小状态。
基于动量因子和自适应学习率的BP神经网络:
在误差反向传播的基础上,每一个权值(或阈值)的变化上加上一项正比于前次权值(或阈值)变化量的值,并根据反向传播法来产生新的权值(或阈值)变化。
?ωij (k+1)=(1-mc)η+mc?ωij (k)
?ai (k+1)=(1-mc)η+mc?ai (k)
其中,η为学习速率,mc为动量因子,一般取0.95左右。根据附加动量法的设计原则,当新的权值导致误差增长时,新的权值应被取消而不是采用,同时动量作用停止下来,以使网络不进入较大误差曲面;当新的误差变换率超过设定的最大误差变化率时,也应取消所计算的权值变化。其最大误差变化率可以是任何大于或等于1的值。训练程序中采用动量法的判断条件为:
学习速率η决定每一次循环训练所产生的权值变化量。大的学习速率可能导致系统的不稳定;小的学习速率会导致较长的训练时间,可能收敛速度很慢。一般情况下,学习率初始值选取范围为0.01至0.8。在实际训练过程中,经常出现训练在达到规定的总步长就已经停止,而误差没有下降到规定精度。因此,需要根据训练误差值调整学习率,调整依据为
2 仿真试验
2.1 试验方法
以某有源相控阵雷达为例,其共有80个组件,从雷达正常工作开始,每分钟记录一次组件的温度。
通过反复测量可以得知,雷达工作30分钟后组件温度达到相对稳定状态,从每分钟温升3℃、4℃降到每3、4分钟温升1℃或不变。预测方法为:用前3分钟温度值,预测1分钟后的温度值。例如要预测1分钟后的温度,选择第0,1,2分钟的温度数据,目标为第3分钟的温度数据,通过搭建好的神经网络预测模型进行训练,当输入第1,2,3分钟的温度数据,预测第4分钟温度,通过对比进行验证。
可根据实际情况选择合适大小的输入向量p(t1,t2,t3;t2,t3,t4;...),目标向量t(t4;t5;...),隐藏层数为1,隐含层节点数为经验值12,传输函数选用logsig,purlin。训练函数选用traingdx,学习函数选用learngdm。动量因子net.trainParam.mc选择0.9,自适应学习率net.trainParam.lr_inc=1.05,net.trainParam.lr_dec=0.7。
2.2 仿真结果分析
2.2.1 预测1分钟后温度
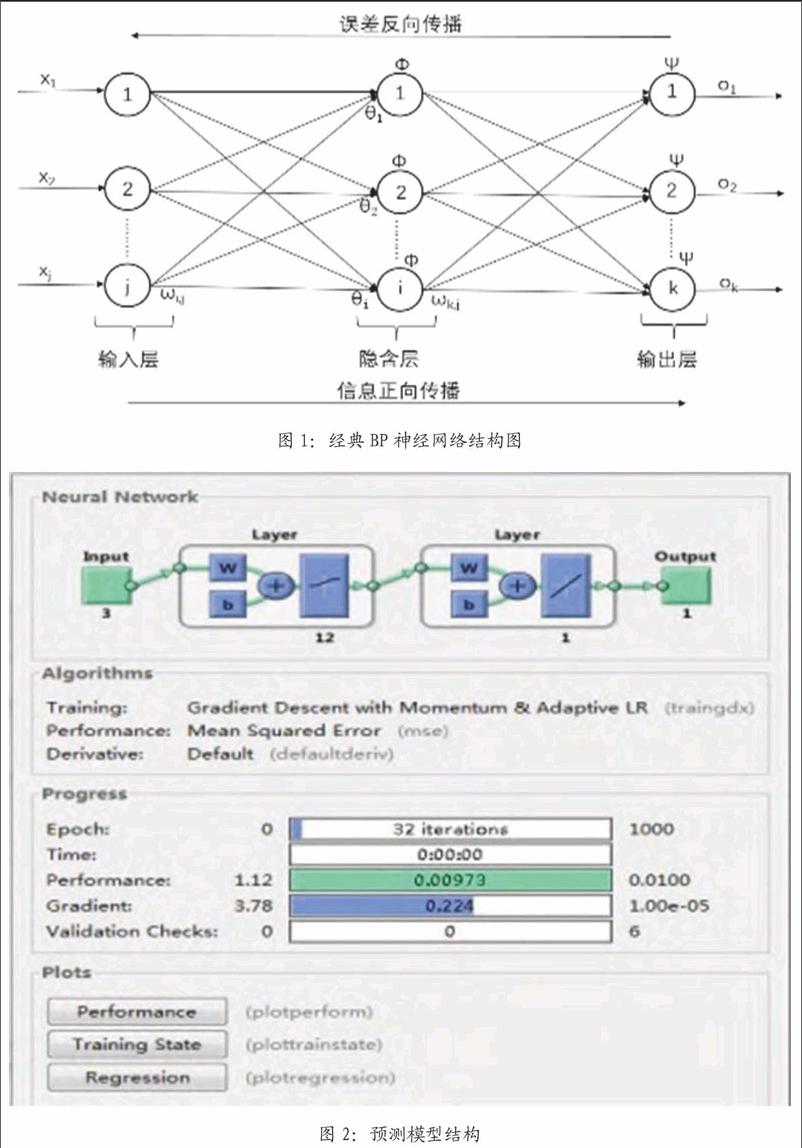
选择2号组件进行1分钟后温度预测,输入向量为(34,34,36;34,36,40),目标向量(40,41),预测样本(36,40,41),预测第5分钟温度。预测模型结构如图2所示。
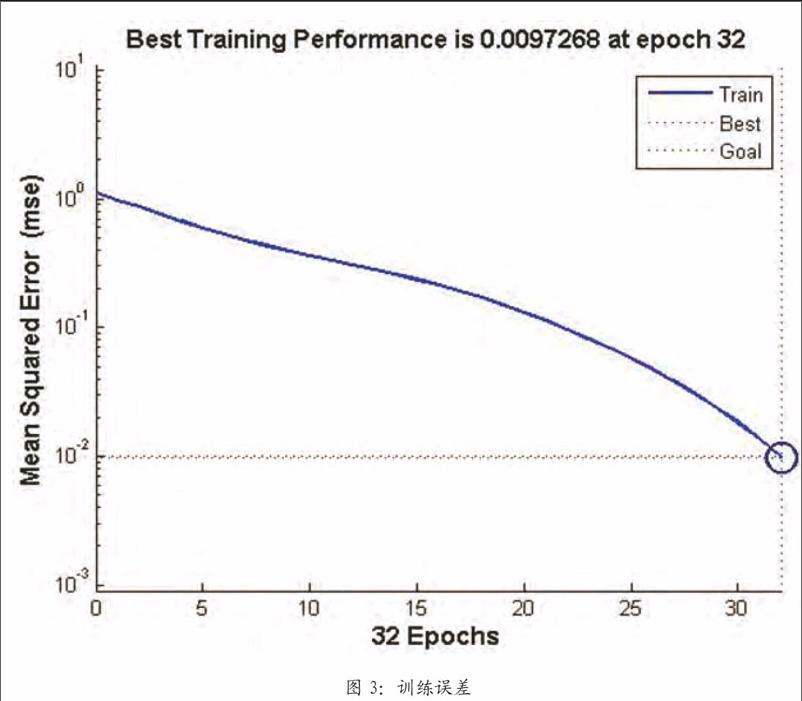
预测模型结构及训练误差曲线如图3所示。
统计连续预测10次的误差。由表1可以看出,预测温度值与实际值的误差基本保持在1℃左右。
以上预测出现误差较大的情况,但发生的频率不高。这种情况出现的原因之一是神经网络初始权值的随机性。虽然每次训练网络都达到相应精度,但每次训练后网络的各个隐含层权值、阈值都不完全一样,因此在预测时,即使保持输入样本不变,但结果仍然会有变化。第二,当网络初始值恰好随机到某些数值时,训练过程中,步数已经达到规定步数,但误差值不跳出误差表面的低谷,收敛速度过慢,使得训练已经停止,而训练误差还很大;如果增加步数,训练时间亦会增加。
3 结束语
基于动量因子的自适应学习速率BP神经网络能够完成T/R组件的温度预测。若将每次开机后温度都记录下来,丰富训练样本,可进一步减少温度预测的误差。由于神经网络具有很强的非线性映射拟合能力,能反映出组件实际工作状态的发展趋势与状态信息之间的关系,因此,当预测程序发出预警,未来时刻组件的温度发生异常,偏离了历史温度值或与相邻组件温度值有较大差异时,雷达操作员将做出相应的预防性维修措施,防止组件因温度过高而受到损伤。
在雷达装备应用PHM技术起步阶段,此方法能够应用到有源相控阵雷达前端的状态预测,提高装备的可靠性和维修性。同时也对其他设备的状态监测及预测起到一定借鉴作用,具有良好的应用前景。
参考文献
[1]郭衍莹.相控阵雷达测试维修技术[M].北京:国防工业出版社,2013:172-174.
[2]周林, 赵杰.装备故障预测与健康管理技术[M].北京:国防工业出版社,2015:168-170.
[3]刘冰,郭海霞.MATLAB神经网络超级学习手册[M].北京:人民邮电出版社,2014:160-164.
[4]陈明.MATLAB神经网络原理与实例精解[M].北京:清华大学出版社,2013:156-160.
[5]肖治平,吴丈全.遗传BP网络在机载雷达故障诊断中的应用研究[J].计算机测量与控制,2011,19(01):14-25.
[6]陈明.MATLAB神经网络原理与实例精解[M].北京:清华大学出版社,2013:156-160.
作者单位
西安电子工程研究所 陕西省西安市 710100
猜你喜欢
现代电子技术(2016年22期)2016-12-26
商情(2016年43期)2016-12-23
考试周刊(2016年21期)2016-12-16