
车联网环境中基于RFID的车辆定位方法
2016-12-22 09:55郭彬,赵燕
公路交通科技 2016年12期
郭 彬,赵 燕
(河南交通职业技术学院,河南 郑州 450000)
车联网环境中基于RFID的车辆定位方法
郭 彬,赵 燕
(河南交通职业技术学院,河南 郑州 450000)
为了提高车辆定位精度,提出了一种基于RFID的车辆辅助定位方法。车辆获得两个不同的位置数据:从车辆GPS接收器获得GPS坐标和通过RFID通信获得准确物理位置。通过这两个数据计算GPS误差,最后比较相邻数据来改正有误差的GPS坐标。车辆可以作为一个基站,与基站相邻的车辆可以利用基站传来的误差对车辆进行精确定位。为了减小由于信噪比变大造成的车辆位置精度下降,基于复合二次函数模型确定出加权系数,利用一种改进的加权系数方法校正了偏移误差。仿真试验结果表明:提出的基于RFID的辅助定位方法在城市道路上能获得准确的车辆位置,可以满足在车联网环境下的车辆定位精度需求。
智能交通系统;车辆定位方法;RFID;加权系数;车辆
0 引言
在车联网中,为了对车辆进行定位,车辆之间或者车辆和路边基础设施需要交换数据,在实际应用中常常假设车辆的实时位置能够被提供。目前在导航应用中一般利用GPS数据来确定车辆的位置,但是安全驾驶和应急指挥系统需要更加精确的车辆位置信息,所以先进的位置定位技术已被提出。
在无线网络中,信号传播的一些特性已经向定位方向发展。细胞定位[1]利用来自发射塔的信号传播延迟来计算绝对位置。Kukshy等[2]用传播特性来估计相邻车辆之间的距离和相对位置,然而由于失真和干扰,无线信道太不稳定,所以不能获得车辆准确位置。车联网中众所周知的寻找相对位置的技术(三边测量),需要至少在无线范围内3个相邻的点来确定位置,所以在稀疏的交通环境中不能对车辆进行准确定位[3-4]。数据融合作为在车联网中的另一个定位方法,通过整合从不同设备获得的几种数据来计算位置,例如GPS、数码相机、智能手机等[5-6]。在数据融合中位置的准确性依赖于传感器的数量和质量,在现有的方案中最好的情况下差分GPS能把位置精度提高几十厘米[7-8]。但在道路环境中,随着车辆远离参考点,它的精度急剧下降。
在车联网中,为了提供精确的位置,本文通过射频识别(RFID)提出一种新的定位方法。一辆配备了GPS系统的车辆在行驶过程中使用RFID读取器从驾驶路边单元的RFID标签获得精确的位置数据,还可以读取储存在RFID标签中的道路交通信息[9],然后通过无线向相邻的安装GPS车辆传播它计算出来的GPS误差,进而对装有GPS的车辆进行定位[10-11]。W Cheng等[12]提出了没有安装GPS车辆的位置计算方法,但是随着参考车辆和用户之间距离的增加,车辆位置数据精度逐渐下降。在城市道路中随着车辆之间的距离增加,由于遮挡物的原因,信号传输的信噪比下降。为了减少这种误差,本文利用一种改进的加权系数法来减少定位误差,以在城市道路中获得准确的车辆位置数据。
1 原理
如图1所示,VR和VM都是安装GPS的车辆,VR车在RFID的传播范围内, VR车使用RFID读取器从RFID标签获得精确的位置, VR车可以当作一个基站,通过无线向VM车传播误差,通过VR车可以得到VM车的精确位置。
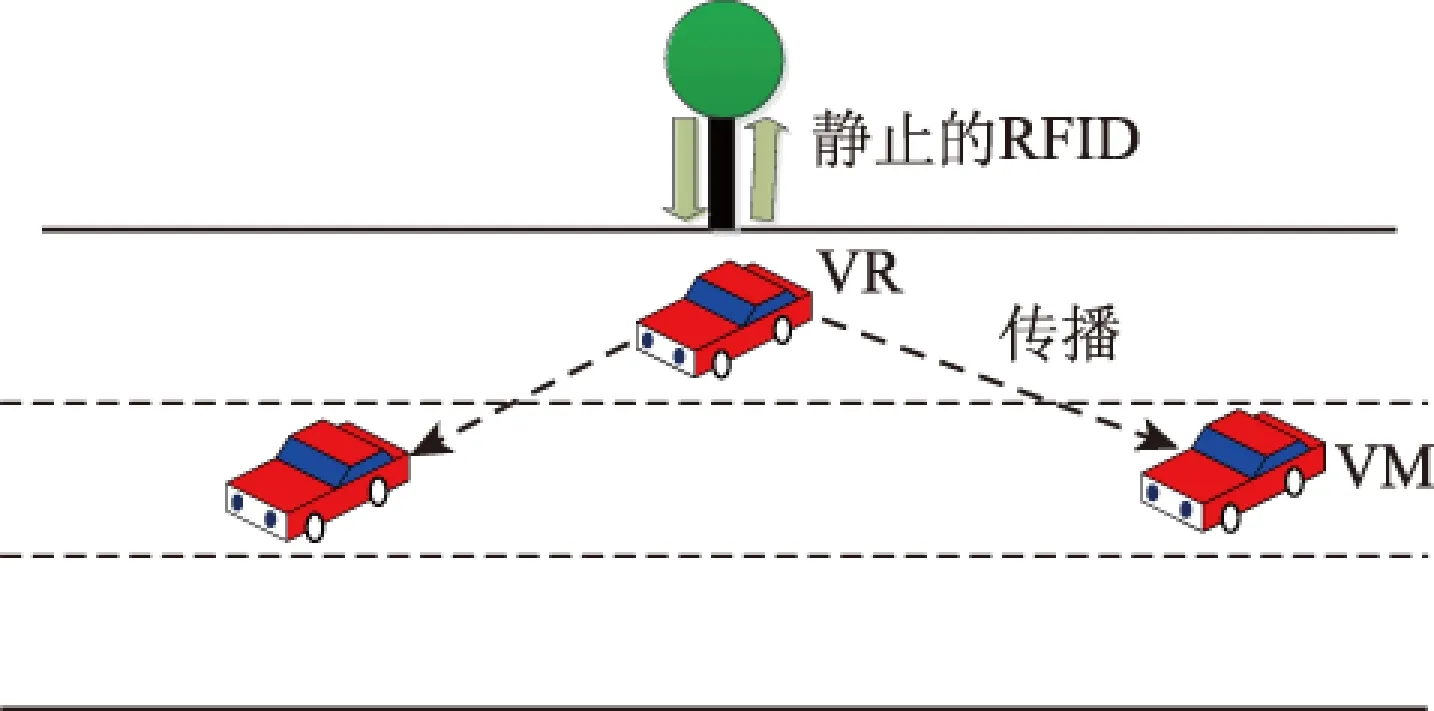
图1 定位原理图Fig.1 Schematic diagram of location
在车辆定位中可以利用加权系数方法减小定位误差[13-14]。本文利用一种改进的加权系数方法对车辆进行精确定位。为了获得VR车的位置,需要计算VR车到每辆VM车之间的距离, VR车的坐标(xi,yi)被发送到VM车的接收器中,所以VM车到VR车的距离为:
(1)
式中,c为光的速度;Δt为波传播的时间;(x,y)为VM车的坐标;s为传输误差。
(2)
式中,(xn,yn)为第n辆VR车的位置坐标;(xn+1,yn+1)为第n+1辆VR车的位置坐标;(Δx,Δy)为车辆的位置差。
式(2)可以被扩展成式(3):
(3)
式中,rn+1,i为第n+1辆VM车到第i辆VR车的距离;rn,i为第n辆VM车到第i辆VR车的距离,ri为VM车到第i辆VR车的距离;(Δxn,Δyn)为车辆的位置差。
在式(3)中设li=∂ri/∂xn,mi=∂ri/∂yn, Δri=rn+1,i-rn,i,i=1, 2,…,n。则车辆之间的距离Δr可以被表示为:
(4)
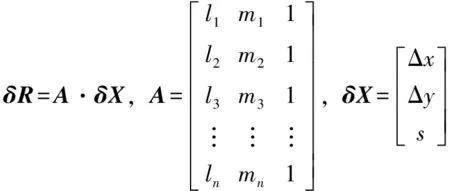
如果从左边乘以矩阵A的转置矩阵,可以得到结果如下:
(5)
当求解式(5)时,可以得到车辆的位置数据。为了减少信噪比对定位的影响,可以把加权系数和距离联系起来。加权系数矩阵W可以表示为:
(6)

在矩阵(6)左边乘以矩阵A的转置矩阵之前,把式(4)和矩阵W相乘,可以得到:
(7)
基于RFID的车辆定位方法可以利用车辆VR位置数据来校正误差。计算这个校正数据的方法如式(8)所示。
(8)

2 方法
2.1 基于权重系数的车辆定位方法
本文中的权重系数是根据车辆之间的距离大小确定的。因为长距离会增加校正错误而短距离反之,所以本文制订4种模型的权重系数,使长距离加权系数小于短距离加权系数,分别如图2(a)~(d)所示。

图2 函数模型Fig.2 Function models
2.2 偏斜误差的改正
在本文方法的测量中,可以认为测量精度依赖于距离的长短。而且车辆之间的距离长短和偏移误差之间的关系几乎是线性关系,即距离越长, 偏移误差越大(图3)。
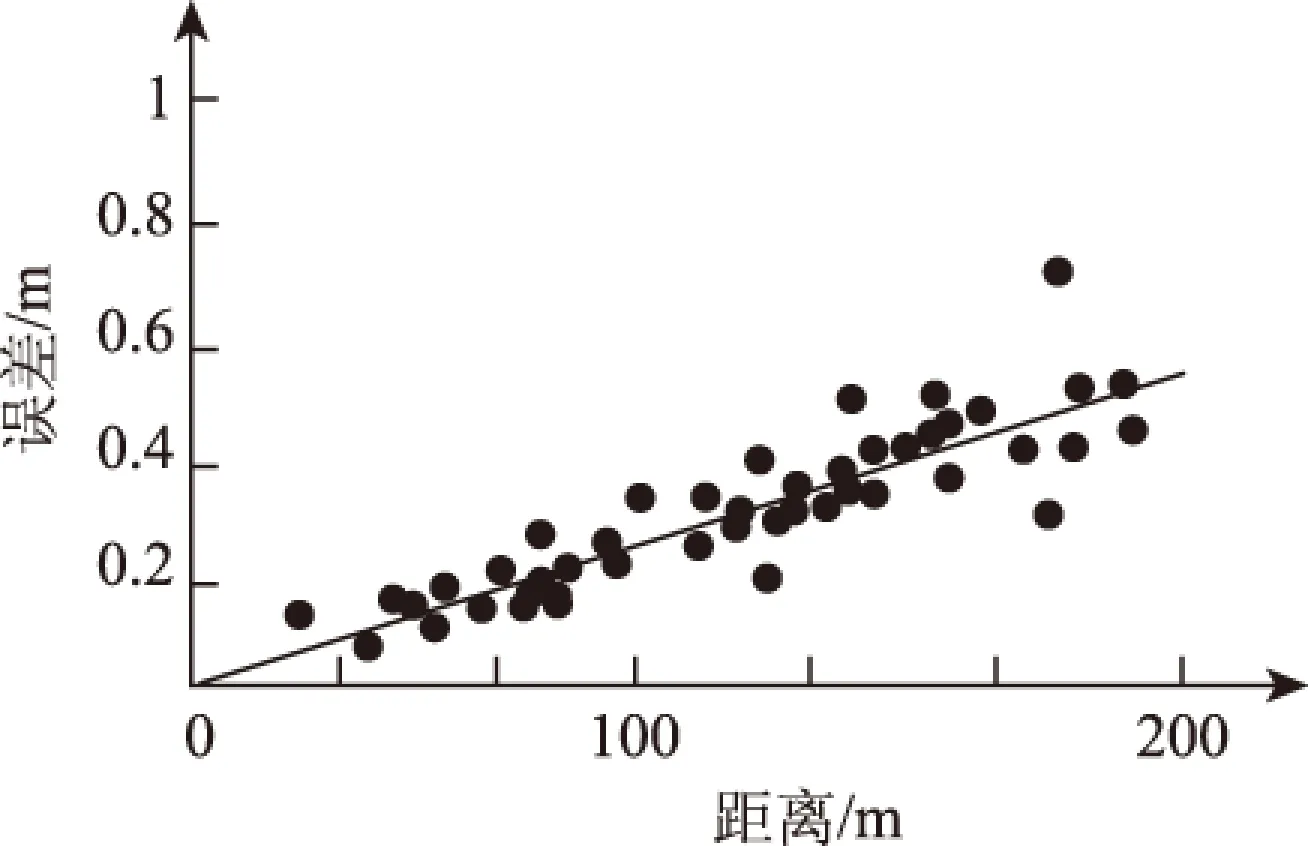
图3 基准线长度与误差之间的关系Fig.3 Relation between baseline length and error
为了减少偏移误差,本文设计了如下模型:
(10)
(11)
式中,xi和yi分别为VM车的横、纵坐标,x0和y0分别为一个参考站VR车的横、纵坐标;t为观察的时间值;t0为校正数据的计算时间。这些公式通过最小二乘法从线性函数的近似值中得到,因此测量点根据参考站的相对位得到纠正。
3 仿真试验
3.1 基于RFID车辆定位方法的试验
采用2014年9月20日长春浮动车试验数据对本文方法进行验证。试验车装有RFID读写器,沿长春市南湖大路-亚泰大街-自由大路-人民大街进行行车试验,试验车共经过8个有信号控制的路段,试验时间为8:00—9:00,RFID标签按一定的距离布置在不同的路段上,RFID利用一定范围内的RFID基站对车辆进行定位,其性能如表1所示。数据处理单元对无线定位接收机输出的信号进行分析,采样频率Fs=1 MHz,采集样本数N=500。在城市道路中一般每500 m设置1个RFID标签,但是在交通比较拥堵的地区(例如商业街、医院等附近)每200 m需要设置1个RFID标签,RFID标签尽量布置在交叉口和路段中心附近。首先在不同的交通量道路中进行试验。其次在不同的速度范围进行试验。
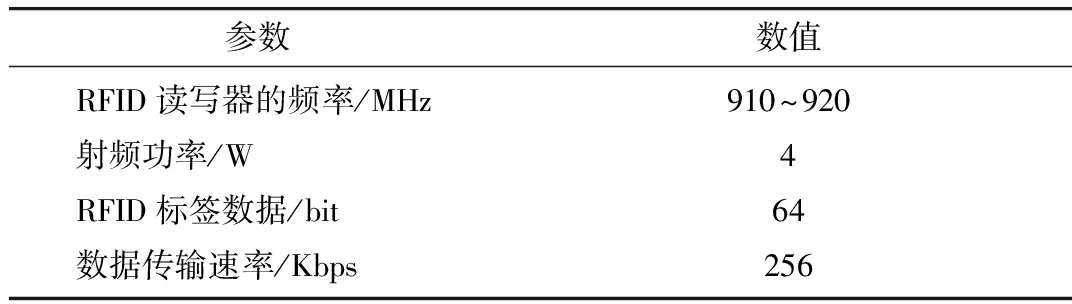
表1 RFID的性能
3.1.1 不同的交通量
试验中,50~400辆车被部署在5 km长的四车道公路上,平均车辆之间的距离为50~400 m。在道路上设置200辆车的情况下,60.2%的GPS车辆可以在36 s内刷新位置信息;路上有300辆车时,有85.2%的GPS车辆可以在36 s内刷新位置信息;路上有400辆车时,有96.5%可以在36 s内刷新位置信息。在60 s时间内,若道路上有超过200辆车,83%的GPS车辆可刷新位置信息。这意味着通过基于RFID的辅助车辆定位,大多数GPS车辆可以在60 s内获取它们的准确位置。
3.1.2 不同的速度范围
该试验研究的是车辆速度对定位性能的影响。将速度范围划分为3组:15~30, 20~30, 25~30 m/s。此外,每组都有两种不同的设置:第一,在给定的速度范围内,车辆随机选择速度;第二,车道被划分为快车道和慢车道(车速依然从给定范围内选择)。随着GPS车辆的变化,车辆位置刷新间隔也变化;高速度的车辆可以缩短刷新间隔,因为高速度变化提供了更多的机会与GPS车辆(参考车辆)相遇。
3.2 加权系数对定位的影响
下面利用本文提出的利用加权系数减小误差的方法进行验证。结果如表2所示。表2显示了偏移误差的结果,偏移误差是指从二维测量平均值到接收机计算的误差。通过权重系数使测量误差得到了改进,尤其是复合函数模型更好。所以复合二次函数模型是最好的权重系数模型,因为随着距离增加到一定值时,由于某种遮挡物的影响,信噪比会迅速下降,误差也会迅速增大。表2也显示偏斜误差的校正结果,即使用加权系数进行测量后的纠正偏斜误差。
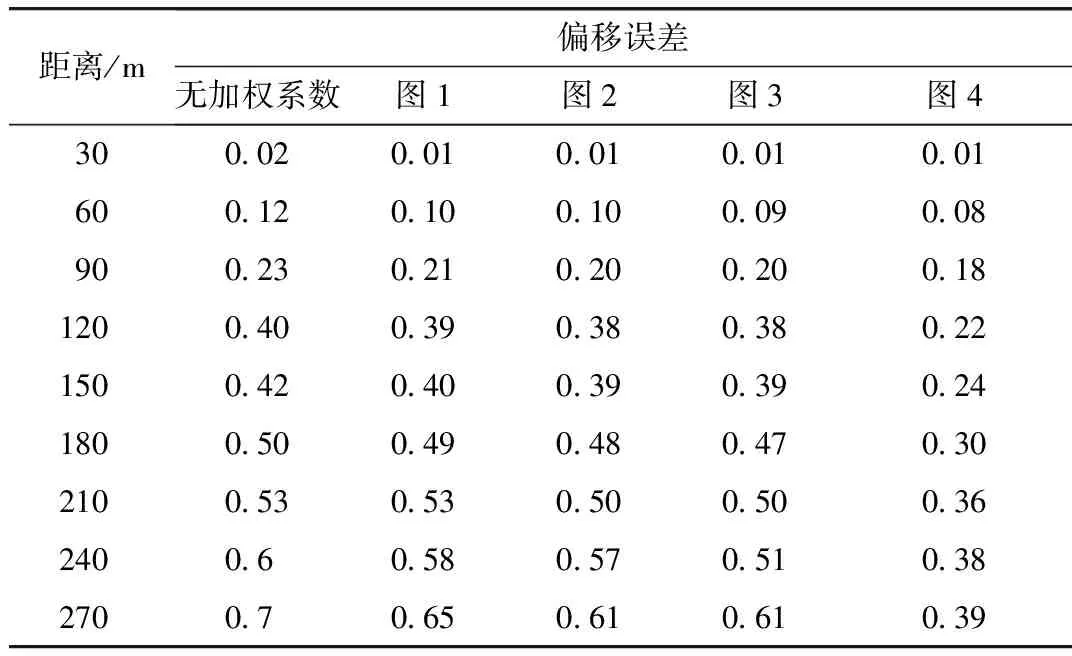
表2 使用加权系数的偏移误差结果
复合二次函数的具体模型根据不同的道路条件确定。式(12)是本文在试验场地定义的复合二次函数模型:
(12)
图4显示了车辆之间的距离和定位误差的关系。可以看出,通过提出的方法可以减少因信噪比减少而造成的定位错误。
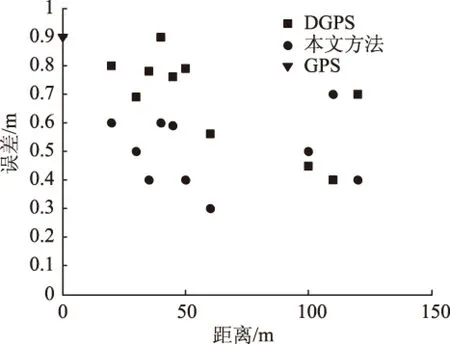
图4 距离与定位误差的关系Fig.4 Relation between distance and locating error
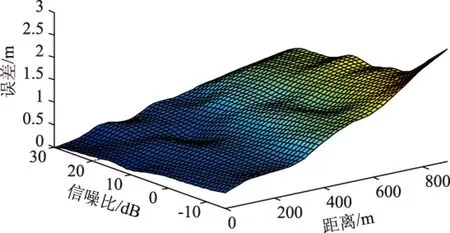
图5 在没有利用加权的情况下基于RFID的车辆定位结果Fig.5 Vehicle location result based on RFID without using weighting
图5为待定位车辆到VR车在不同距离、不同信噪比、没有利用加权的情况下基于RFID的定位结果。可以发现,定位误差随着距离的增大而增大,随着信噪比的下降而增大,并且信噪比比距离对定位的影响大。在距离小于100 m、信噪比大于15 dB的情况下,误差变化比较缓慢,而在距离大于100 m,信噪比小于15 dB的情况下,误差变化比较大。
图6为不同的定位车辆到RFID基站的距离和不同信噪比的情况下,利用本文加权方法得到的定位误差结果。可以看出,当信噪比较大、距离较小时,定位误差较小;当距离增大、信噪比减少时,因为本文方法对不用距离和信噪比的车辆进行了加权,得到的误差不会增大,定位误差变化较小,均小于0.5 m,说明了本文提出方法的有效性,符合在车联网环境下对车辆定位的精度要求。

图6 利用本文方法一次定位得到的结果图Fig.6 Result using proposed method for once location
图7为用本文方法和传统的差分GPS方法定位误差结果的对比。可以看出,本文方法定位误差不大,均在0.5 m内,只有极少数超过0.5 m,符合定位精度要求。
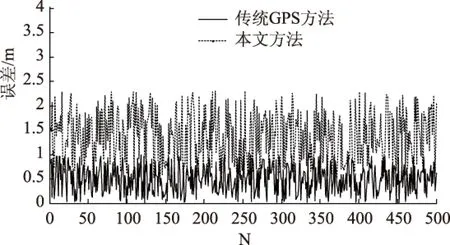
图7 本文方法和传统的GPS方法定位误差结果对比图Fig.7 Comparison of proposed method and traditional GPS method
4 结论
为了满足在车辆网中需要很高位置精度的要求,本文提出了一种基于RFID的车辆定位方法,通过车辆之间距离的权重系数来对偏移量进行校正,试验证明最好的权重模型符合二次函数模型,这种方法可以减少传统方法利用RFID定位因距离增加而造成的定位错误,定位精度符合车联网中的要求。
[1] VARSHAVSKY A, CHEN M, DE LAR E, et al. Are GSM Phones the Solution for Localization?[C]// Proceedings of 7th IEEE Workshop on Mobile Computing Systems and Applications. [S. l.]: IEEE, 2006.
[2] KUKSHYA V, KRISHNAN H, KELLUM C. Design of a System Solution for Relative Positioning of Vehicles Using Vehicle-to-vehicle Radio Communications during GPS Outages[C]// 2005 IEEE 62nd Vehicular Technology Conference. Dublin: IEEE, 2005.
[3] JIAO L, XING J P, LI F Y. Performance Comparison of Residual Related Algorithms for TOA Positioning in Wireless Terrestrial and Sensor Networks[C]// 1st International Conference on Wireless Communication, Vehicular Technology, Information Theory and Aerospace & Electronic Systems Technology, 2009. Copenhagen: IEEE, 2009: 278-283.
[4] PAULUZZI D R, BEAUCIEU N C.A Comparison of SNR Estimation Techniques for the AWGN Channel[J].IEEE Transactions on Communications, 2000, 48(10):1681-1691.
[5] SCHUBERT R, SCHLINGELHOF M, CRAMER H, et al. Accurate Positioning for Vehicular Safety Applications: The SAFESPOT Approach [C]// IEEE 65th Vehicular Technology Conference. Dublin, Ireland: IEEE, 2007:610-632.
[6] BOUKERCHE A, OLIVEIRA H, NAKAMURA E, et al. Vehicular Ad Hoc Networks: A New Challenge for Localization-based Systems[J]. Computer Communi-cations, 2008, 31(12): 2838-2849.
[7] DRAWIL N. Improving the VANET Vehicles’ Localization Accuracy Using GPS Receiver in Multipath Environments[J]. Dissertations & Theses, 2007, 66(10): 1920-1934.
[8] LEE E K, OH S Y, GERLA M, Et al. RFID Assisted Vehicle Positioning in VANETs[J]. Pervasive and Mobile Computing, 2012,28(2): 167-179.
[9] HATAY M. Empirical Formula for Propagation Loss in Land Mobile Radio Services[J]. IEEE Transactions on Vehicular Technology, 1980, 29(3): 317-325.
[10]杨兆升.基于动态信息的智能导航与位置服务系统关键技术及其应用[D].北京: 中国铁道出版社,2005. YANG Zhao-sheng. The Key Technology and Application of Intelligent Navigation and Position Service System Based Dynamic Information[D]. Beijing: China Railway Publishing House,2005.
[11]NOZAKI K,ISHIBUCHI H,TANAKA H. Adaptive Fuzzy Rule-based Classification System[J]. IEEE Transactions on Fuzzy Systems, 1996, 4(3): 238-250.
[12]CHENG W, CHENG X, SONG M, et al. On the Design and Deployment of RFID Assisted Navigation Systems for VANETs[J]. Transactions on Parallel and Distributed Systems, 2012,23(7): 175-185.
[13]IQBAL U, OKOU A F, NOURELDIN A. An Integrated Reduced Inertial Sensor System:RISS/GPS for Land Vehicle[C]// Position, Location and Navigation Symposium, 2008 IEEE/ION. Jerusalem: IEEE, 2008.
[14]GUVENC I, CHONG C C. A Survey on TOA Based Wireless Localization and NLOS Mitigation Techniques[J]. IEEE Communications Surveys & Tutorials, 2009, 11(3): 107-124.
A Vehicle Positioning Method Based on RFID in Internet of Vehicles
GUO BIN, ZHAO YAN
(Henan Transport Vocational Technology College, Zhengzhou Henan 450000, China)
In order to improve vehicle positioning accuracy, an auxiliary vehicle positioning strategy based on RFID is proposed. Vehicles obtain 2 data from different positions: the vehicle GPS coordinates from the GPS receiver and the accurate physical location from RFID communication. Then, the GPS error can be calculated by the 2 data, and inaccurate GPS coordinates can be corrected after comparing the adjacent data. The vehicle can be served as a base station, and the adjacent vehicles can take advantage of the error from base station to calculate the precise vehicle position. In order to reduce the vehicle location precision dropping caused by signal-to-noise ratio increase, the weighted coefficient is determined based on composite quadratic function model, and the offset error is corrected by an improved weighted coefficient method. The result of simulation test shows that the accurate location of vehicles on city roads can be obtained using the proposed auxiliary positioning method based on RFID, which can meet the requirements of vehicle positioning accuracy in internet of vehicles.
ITS; vehicle positioning method; weighting coefficient; vehicle; radio frequency identification(RFID)
2015-11-06
河南省交通运输厅科技计划项目(2014G21)
郭彬(1981-),男,河南洛阳人,硕士研究生.(zhengk13@163.com)
10.3969/j.issn.1002-0268.2016.12.022
U491
A
1002-0268(2016)12-0140-05
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
北京航空航天大学学报(2019年9期)2019-10-26
小学生导刊(2018年34期)2018-12-18
知识经济·中国直销(2018年3期)2018-04-12
雷达学报(2017年3期)2018-01-19
山东青年(2016年3期)2016-02-28
学习月刊(2015年1期)2015-07-11
西南石油大学学报(自然科学版)(2015年5期)2015-04-16
