
高速铁路GPS框架控制网平差方法
2016-12-26 11:58高洪涛许双安
地理空间信息 2016年4期
高洪涛,张 旻,饶 雄,许双安
(1.沪昆客专湖南公司,湖南 长沙 410000;2.中铁第四勘察设计院集团有限公司,湖北 武汉 430079;3.中铁第一勘察设计院集团有限公司,陕西 西安 710000)
高速铁路GPS框架控制网平差方法
高洪涛1,张 旻2,饶 雄2,许双安3
(1.沪昆客专湖南公司,湖南 长沙 410000;2.中铁第四勘察设计院集团有限公司,湖北 武汉 430079;3.中铁第一勘察设计院集团有限公司,陕西 西安 710000)

框架控制网(CP0)作为高速铁路平面控制测量的起算基准,采用适合长基线解算的高精度专用软件,利用精密星历,按照多基线模式进行解算。结合相关测量数据处理经验及通用GPS网平差软件研发,对框架控制网GPS基线网平差方法进行研究分析,在此基础上就网平差观测值提取及随机模型重构、框架基准转换及基线网平差等提出见解,提高了基线解算的可靠性和精度。
高速铁路;基准统一;多基线模式;基线向量重构;框架控制网;基线网平差
高速铁路线路长、地区跨越大,平面控制网沿线路呈带状布设,需按一定间距布设框架控制网(CP0)。CP0控制点布设间距约50 km,与国际IGS参考站或国家CGCS2000 A、B级GPS点进行联测,采用专业的基于Linux操作系统的长基线解算软件(如GAMIT、BERNESE等)进行基线解算,数据处理精度较高[1]。全网一次性布设,统一测量,进行整体三维平差。高精度GPS长基线解算软件采用精密星历,解算时应采用IGS综合最终星历。不同时期的精密星历,各自基于IERS发布的某一参考框架下参考历元计算,与基线解算时起算点及约束平差时国家A、B级点点位坐标参考框架及参考历元不同,这些差异会导致网平差起算基准不一致。同时多基线解模式考虑了同步观测基线间随机相关性,而常见商用用软件(GPS设备商自带软件及各铁路设计院开发的软件等)在平差时忽略基线之间的相关性,平差后点位坐标偏差有时能达到几个mm,在CP0框架网平差中不容忽视[2]。CP0数据处理中如不能正确考虑并处理这些因素,将造成最终定位结果出现偏差而无法满足精度要求。本文结合铁路工程建设中CP0数据处理的一些经验,对基线网平差策略进行研究分析,得出了一些有益的结论。
1 平差观测值选取
1.1 重构基线观测值及独立基线提取
同步基线数据是以观测时段为基本单元的基线向量文件,由基线处理软件输出,其格式各不相同,平差时提取每条基线的三维基线分量作为平差观测值,基线的方差协方差阵作为随机模型进行定权。
单基线解模式是:基线成果数据给出了每条基线三维分量及单条基线分量间方差-协方差阵;基线数据格式:时段号、起点、终点,DX、DY、DZ,cov(DX,DX)、cov(DY,DY)、cov(DZ,DZ),cov(DX,DY)、cov(DX,DZ)、cov(DY,DZ)。DX、DY、DZ是 基 线向量在WGS84空间直角坐标系下的3个坐标差分量,cov()是基线向量各分量的方差-协方差。
多基线解模式是:考虑了同步观测基线间随机相关,基线解算文件给出了测站坐标分量。平差时若忽略同步观测时段基线之间的相关性,整网基线方差-协方差阵为对角阵且基线间相关元素值为零,平差后点位坐标偏差可达到mm级,同时对转换参数和单位权方差也有一定的影响。高精度GPS网平差不应忽视,应考虑基线间的随机相关性,以保证模型的严密性。多基线解数据应重新构造基线观测值及方差协方差阵,转换过程如下:
1)将每点的地心纬度坐标转换成空间直角坐标:

3)地心纬度坐标系与空间直角坐标系下的方差-协方差转换公式为:

其中,
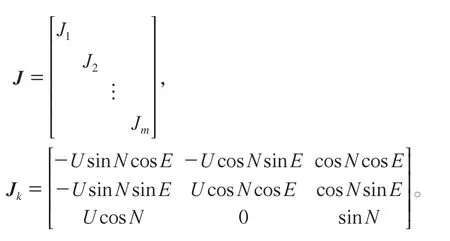
基线向量观测值,实质就是基线起点、终点的三维空间直角坐标求差得到的3个分量。通过上述步骤获得各个点的三维空间直角坐标及全网坐标方差-协方差阵,可由任意2点坐标求差构造基线,通过协方差传播定律由坐标方差-协方差阵推导基线向量方差-协方差阵。
在构造基线观测值时,可同步完成独立基线的提取,构造基线的数量是一定的,起点和终点可任意选择。在一个同步观测环里有n台GPS接收机进行观测,任意2台接收机之间可计算出一条基线向量,则整个时段可以计算出n(n-1)/ 2条同步观测基线,可以选出几何不相关的n-1条同步观测基线。基线网平差时采用独立基线可以消除同步环几何相关带来的误差,减少计算量,平差后精度指标更符合实际测量情况。常见的独立基线提取方法有以下几种:
1)传递式。同步时段基线中选定一点作为起点,以与该点相连的点确定一条基线,沿着某个方向依次递进挑选路径中的基线。如图1所示,传递式提取独立基线法,只需按顺序前后2点依次坐标求差进行构造。
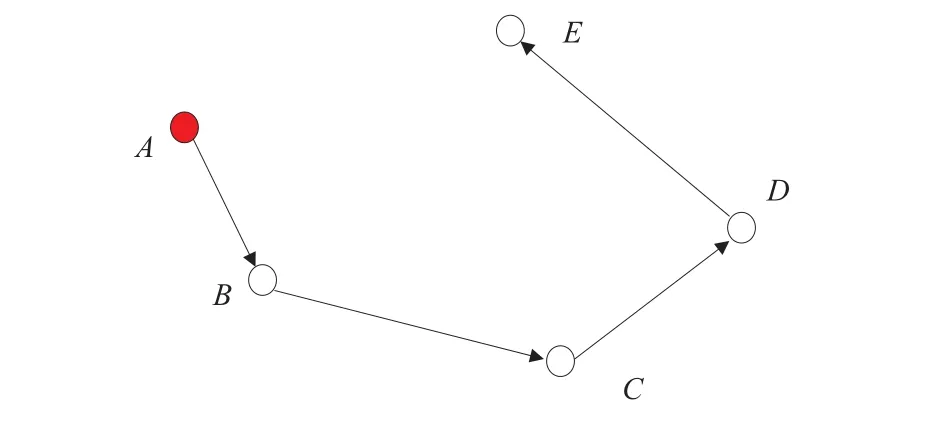
图1 传递式方案挑选的独立基线
2)散射式。同步观测网中,选定网中心一点为基线起点,朝着四周散射方向与其他点构成基线。如图2所示。散射式提取独立基线法,只需在网中选择一个中心点,其他点都与该点坐标求差进行构造。

图2 散射式方案挑选的独立基线
3)相邻最短边式。同步观测环中,通过双差解算获得高精度的基线向量,消除GPS测量中的部分系统误差。测站间距离越短,空间环境相关性越强,差分改正越好[8]。根据误差传播定律,测站中误差与基线距离的平方根成正比[9]。相邻最短边提取独立基线,应满足公式(4):

式中,n为测站点个数;li为选择的独立基线。相邻最短边式进行独立基线构造时,先沿着线路前进方向求取任意两CP0点间距离,再按照最短路径搜索法检索出CP0网一端起点到另一端终点的最短路径,根据最短路径上的点位构造基线。
1.2 平差对坐标值的影响
选择国内某客专在勘测设计阶段建立的CP0框架控制网某年3月1日(DOY60)和3日(DOY62)的观测数据进行计算分析。CP0框架控制网共布设6个控制点CP01、CP02、CP03、CP04、CP05和CP06,点位布设间距约50 km,共联测2个IGS站(WHUN和TWTF)。CP0框架控制网见图3。基线网三维无约束平差使用IGS参考站WHUN(参考框架ITRF2000,参考历元1997.0)的三维地心坐标,采用随机相关和独立2种平差模型平差,求出各测站点的三维坐标成果。
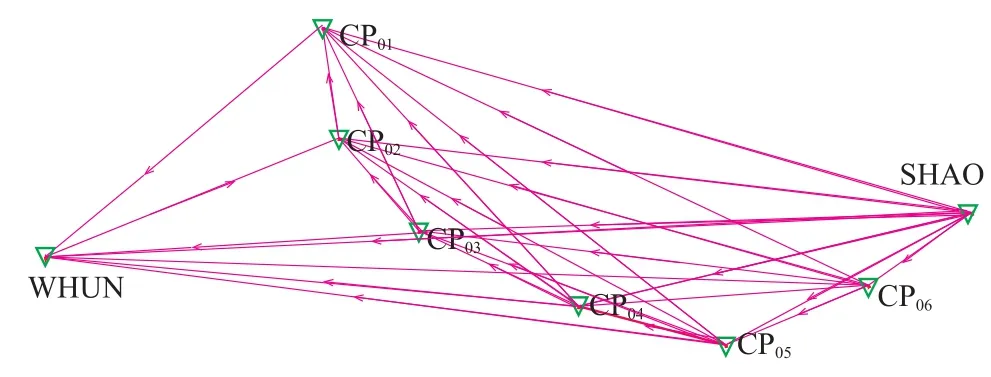
图3 CP0框架控制网网形示意图
采用2种方式进行三维无约束平差,随机相关和独立模型平差后坐标数据的比较见表1。随机模型独立平差采用常用的商用网平差软件(COSA科傻、各铁路设计院平差软件等)进行计算,仅仅读取单条基线的观测值及单条基线的自身元素方差-协方差阵作为随机模型来定权,同步观测基线之间协方差为零。随机模型相关平差采用自主研发的GPS 软件进行基线重构,按照散射式方法提取独立基线计算,整网同步观测时段各基线协方差矩阵元素不为零,按照§1.1的方法进行独立基线观测值提取及整网平差。
从表1 两种模式较差表可以看出,对于多基线解数据,考虑基线间随机模型相关和随机模型独立,平差后坐标值略有差异,在本算例中坐标分量最大为7.9 mm。
选择国内某项目CP0客专在勘测设计阶段建立的CP0框架控制网,CP0框架控制网共布设6个控制点426P、A038、A043、A047、CP04、JF14,CP0框架控制网网形图见图4。
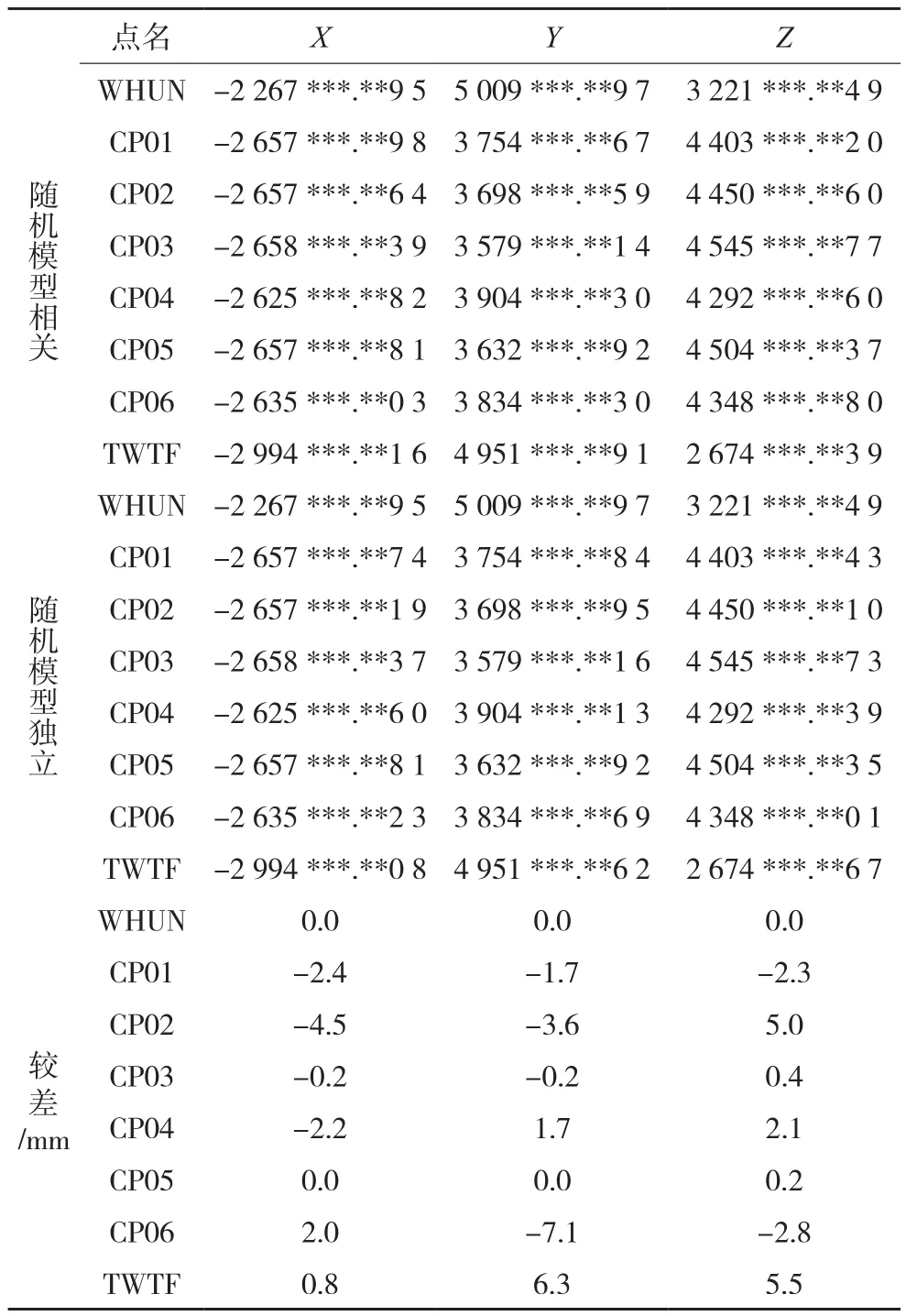
表1 2种模式平差后坐标较差
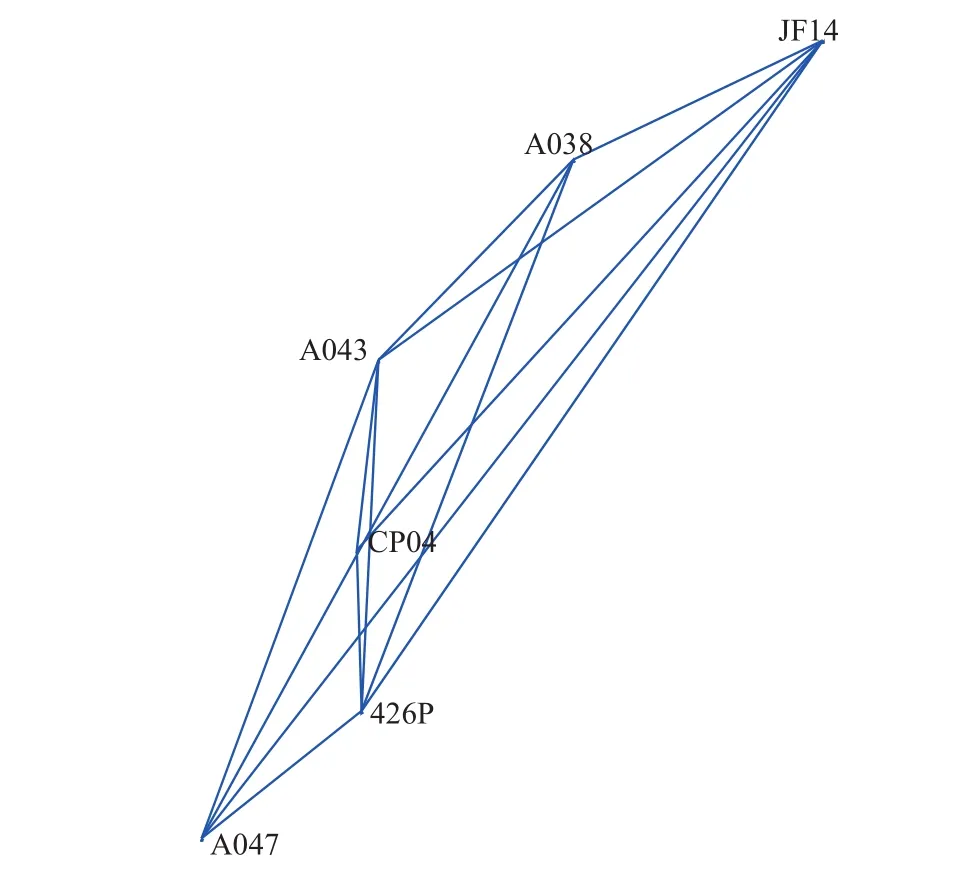
图4 某项目CP0框架控制网网形示意图
基线网无三维约束平差固定426P、A038、A043的三维地心坐标,采用上述2种平差模型分别平差,求出各测站点的三维坐标成果。随机模型相关平差采用自主研发的GPS 软件进行基线重构,按照相邻最短边式提取独立基线计算,整网同步观测时段各基线协方差矩阵元素不为零,按照§1.1中的方法进行独立基线观测值提取及整网平差。
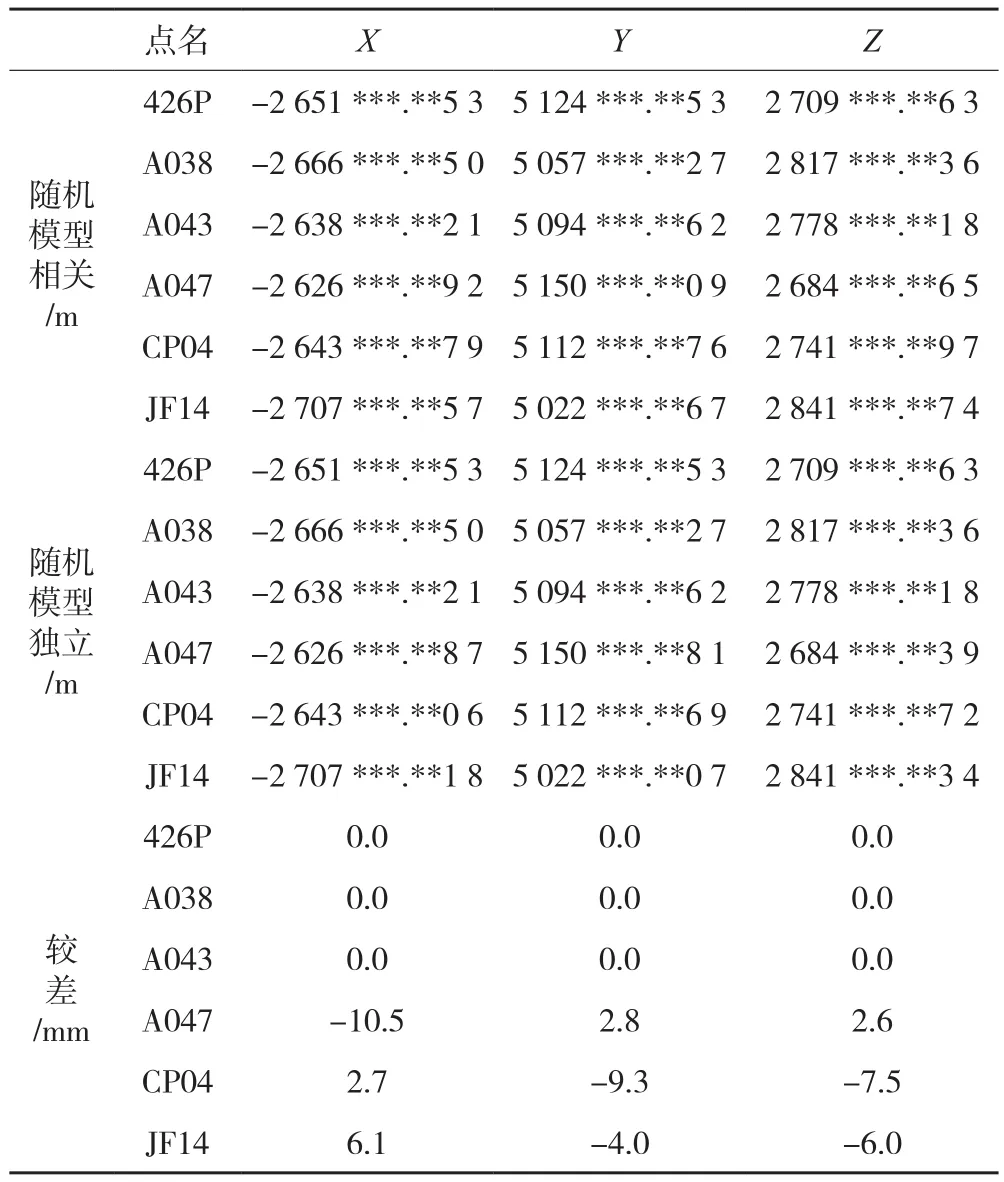
表2 2种模式三维约束平差后坐标较差
从表2 两种模式较差表可以看出,随机模型相关和随机模型独立2种平差方法计算的成果坐标值有一定差别,在本算例中坐标分量最大为10.5 mm。忽略基线间的随机相关性,平差坐标会产生一定偏差,因此,在高速铁路框架网CP0网数据处理中,应考虑同步基线间的随机相关性。
2 基线网平差方法
CP0框架控制网基线解算时需采用高精度解算软件,一般采用长基线解算软件(如GAMIT、BERNESE等)进行处理。GAMIT是开源免费软件,国内科研和工程应用用户数量众多,在高速铁路CP0框架控制网基线解算中应用较多,建议统一采用GAMIT进行解算,数据较为稳定,便于与其他交叉铁路项目的对接及高铁运营期间框架基准的复测维护。CP0框架控制网采用GAMIT解算的基线成果作为观测值进行网平差时,不同于其他GPS控制网平差,主要表现在:
1)同步观测基线分量观测值及整网方差-协方差需要重新构造,不能直接把其他商业GPS基线解算软件输出的单条基线坐标分量和单条基线方差-协方差作为平差观测值和随机模型。
2)在数据预处理时,先选用一种独立基线提取方法后再进行基线观测值重构,两步工作同时进行,可减小运算量。
3)数据预处理时,同步环闭合差不需要计算,因为GAMIT解算基线时已经进行了闭合差分配,理论上GAMIT输出的基线成果文件闭合差为零。
4)数据预处理时,除了计算重复基线较差外,必须拟合计算基线重复性,并对各基线边长分量、北分量和东分量的重复性进行固定误差与比例误差的直线拟合:

式中,Ls为基线长度;a为系统固定误差;b为与基线长度成比例的比例误差。基线重复性拟合检验可以发现异常的观测数据时段,发现异常基线,实现粗差定位的目的。
5)采取三维无约束平差,结合基于相关分析的粗差探测方法[10]进行粗差探测,通过相关分析方法及基线改正数量值定位粗差,最后进一步处理残留粗差,得到可靠的基线并参与最终的平差计算。
6)采用与起算点相同的框架基准进行整网约束平差。
3 结 语
本文结合在高铁CP0数据处理中的经验,对CP0基线网平差数据处理中与常规GPS控制网不同的基准统一、观测值重构及提取、随机模型相关与独立等关键技术进行研究分析与归纳总结,得到如下结论:
1)CP0平差时若忽略基线之间的相关性,方差-协方差阵为对角阵,点位坐标偏差可达到mm级,同时对转换参数和单位权方差也有一定的影响。在高速铁路框架网CP0数据处理时,应考虑基线间的随机相关性,以保证模型的严密性。
2)采用GAMIT进行基线解算的成果,可以利用其给定的同步观测时段中整网地心纬度坐标及其方差-协方差,利用地心纬度与空间直角坐标系的转换关系及协方差传播定律,重新构造基线观测值及其方差-协方差阵。同时构造基线过程中,可以同步采用多种方法进行独立基线提取。
3)采用GAMIT解算的基线,同步观测网中坐标闭合差在基线解算过程中已经进行过分配,同步环闭合差理论上为零,不再作为数据质量检核的条件。基线重复性是重要的基线质量检查指标,平差软件必须进行基线重复性拟合计算。
4)常规的商用软件如COSA等不能满足CP0框架网基线网平差要求,在进行CP0框架网数据处理时,建议采用能满足上述要求的软件,即具备基线重构、考虑随机模型相关及基线重复性拟合的软件。
[1] TB 10601-2009.高速铁路工程测量规范[S].
[2] 黄观文,张勤,丁晓光,等.一种高精度GPS基线网平差及软件实现[J].测绘科学,2009,34(2):167-169
[3] 李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009
[4] 尹伟言,赵鑫.ITRF框架坐标转换问题的研究[J].测绘技术装备,2012,14(3):11-14
[5] 熊四明.2000国家大地坐标系下点位坐标转换方法浅析[J].测绘与空间地理信息,2009,32(5):155-158
[6] 党亚民,成英燕,薛树强.大地坐标系统及其应用[M].北京:测绘出版社,2010
[7] 姚宜斌.高精度GPS测量中坐标基准的统一方法研究[J].地矿测绘,2001(2):3-5
[8] 黄观文.GPS精密单点定位和高精度GPS基线网平差研究及其软件实现[D].西安:长安大学,2009
[9] 王磊,李盼,吕翠仙.关联矩阵法在独立基线及独立双差模糊度选择中的应用[J].武汉大学学报:信息科学版,2010,35(6):715-7 188
[10] 陶本藻,姚宜斌,施闯.基于相关分析的粗差可区分性[J].武汉大学学报:信息科学版,2004,29 (10):881-883
P221
B
1672-4623(2016)04-0093-04
10.3969/j.issn.1672-4623.2016.04.029
介绍:高洪涛,高级工程师,研究方向为铁路精密工程测量。
2016-02-18。
猜你喜欢
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
科学(2020年5期)2020-11-26
中国惯性技术学报(2019年3期)2019-10-15
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
雷达学报(2017年3期)2018-01-19
初中生世界·九年级(2017年10期)2017-11-08
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
舰船电子对抗(2016年5期)2016-12-13
考试周刊(2016年54期)2016-07-18
