
基于三维激光扫描的隧道变形监测方法研究
2016-12-26 11:58黄祖登
地理空间信息 2016年4期
唐 琨,戴 鑫,黄祖登
(1.天津市测绘院,天津 300381)
基于三维激光扫描的隧道变形监测方法研究
唐 琨1,戴 鑫1,黄祖登1
(1.天津市测绘院,天津 300381)

对隧道变形监测方法进行了研究,提出一种通过中轴线上节点坐标偏移的方法提取变形量,用区段拟合方法提取中轴线节点;给出了利用三维激光扫描进行隧道变形监测的实施步骤。实验分析表明,该方法切实可行,满足变形监测的精度要求。
三维激光扫描;隧道变形监测;区段拟合
三维激光扫描技术是一种非接触式主动测量技术,不同于传统的单点测量。该技术通过扫描可以快速获取高密度、高精度、大范围的海量点云数据,得到目标表面的三维坐标,其扫描速度可达数万点每秒。
传统的隧道变形监测,一般采用挂钢尺抄平和钢尺式收敛计等接触方式进行,虽然操作简单,但工作量大且无法进行三维观测。非接触三维测量以测量机器人监测为主,虽然可提供三维坐标,但仍局限于单点测量,无法快速获取整体变形信息[1]。本文研究基于三维激光扫描数据的隧道变形监测方法,用断面中心偏移方法提取变形信息。
1 提取方法
在隧道变形监测中,变形信息的提取是关键。本文思路如下:①对隧道整体或局部进行三维激光扫描,确定合适的基准面,并以合适的厚度、间距对扫描数据进行横断面切片处理,提取断面点云中心;②通过对多期隧道扫描数据中相同位置处的断面中心进行坐标比较,提取变形信息。
为准确提取横断面中心,本文提出了区段拟合法,其思路为:将断面切片点云按一定的规则分为若干区段,分别拟合获取各区段点云中心,再由各区段点云中心拟合得到该断面中心。具体步骤如下:
1)计算假中心点,建立坐标系。将断面点云投影于YOZ平面,对点云进行重心拟合,计算得到断面假中心点O',以O'为原点建立极坐标系。
2)截取区段点云。以合适截取角度∂,按顺时针方向截取(0,∂),(∂,2∂),…,(n∂-∂,n∂)各区段内点云,其中n=360°/∂。
3)获取区段点云中心。设置阈值q,若某区段内点云数量Pm(m∈N,1≤m≤n)大于q,则重心拟合获取该区段中心Om;若Pm小于阈值q,说明该处点云存在空洞,则由相邻区段Om-1、Om+1中心拟合得到该区段中心,Om=(Om-1+Om+1)/2。
4)获取断面点云中心。对n个区段中心进行重心拟合,得到该横断面点云的中心O,O=(O1+ O2+…+On)/n。
由于扫描获取的原始点云坐标基于激光扫描仪的测量坐标系,而截取区段过程中采用的是极坐标,因此,需要先进行坐标转换。具体计算过程如下:
1)在测量坐标系中,假中心点O'三维坐标为(x0,y0,z0),点云中任一点P三维坐标为 (x,y,z),则在YOZ平面的投影坐标为(y,z)。
2)测量坐标系转换为直角坐标系。在以O'为原点的直角坐标系O'-yz中,O'坐标为(y,z),平移向量为a=(-y0,-z0),因此,点P在O'-yz中坐标为(y-y0,y-z0)。
3)直角坐标系转换为极坐标系。在以O'为原点的极坐标系O'(ρ,θ)中,由y=ρcosθ,z=ρsinθ,其中解得点P在极坐标系O' (ρ, θ)中的坐标为
本文首先引入电机输入电能与机器人机械能两个能耗指标,将这两个指标作为目标函数进行不同拾放轨迹的参数优化仿真,并在样机上进行了实验验证;然后通过不同的最优参数轨迹的数据求出能耗值,得出具有Bang-bang速度分配方式的分段多项式曲线为最优拾放轨迹;最后通过不同拾放点与不同轨迹周期试验,展现出最优轨迹具有空间与时间上的可重复性,对不同工业现场的高速拾放操作具有现实的指导意义。本文为机器人轨迹的能耗比较提供了可参考的方法。
2 实施步骤
1)布设测站。针对隧道结构特点并结合实地环境,在保证各测站间有点云重叠[2,3],且扫描能涵盖目标物的前提下,尽量少布设测站。
2)布设标靶。在隧道合适位置布设标靶作为数据后处理过程中点云配准的参考信息,并确定断面截取基准面。
3)采集数据。选择合适的三维激光扫描仪对隧道进行扫描,采集三维数据。为提高精度,可在多期扫描过程中选取相同的测站,并将扫描仪放置于相同的控制点。
4)数据处理。对原始点云进行裁剪、去噪,并将各站点云配准链接后,以适宜厚度、间距对数据进行断面切片处理,并采用区段拟合方法提取断面中心。
3 实验分析
使用Riegle+Z420i三维激光扫描仪对某电缆隧道进行变形监测实验,于2012-12-06、2013-04-19进行两次扫描。如图1所示,该段实验隧道为长约50 m,直径约3 m的矩形隧道,分别在隧道的15 m、35 m处布设控制点并架设扫描仪。同时在隧道中段25 m处布设固定点并架设4个粘有圆形标靶的棱镜[4],作为点云配准以及断面基准,如图2所示。设置隧道扫描分辨率3 mm×3 mm,并以1 mm×1 mm分辨率对标靶进行精扫。第一次扫描获得104 343 726个点,第二次扫描获得103 726 871个点。

图1 隧道扫描实验

图2 布设扫描标靶
3.1 数据处理
使用RiSCAN-PRO软件对原始点云进行裁剪、去噪处理[5],剔除电灯、人员等噪声数据,并采用四元数算法[6,7]对各测站点云进行配准,得到的隧道点云如图3所示。采用Realworks软件的“Cutting Plane Tool”工具对隧道点云进行断面切片处理,以固定标靶位置为基准面,以10 cm厚度、50 cm间距截取切片点云,得到有效横断面91个。某层切片点云如图4所示。
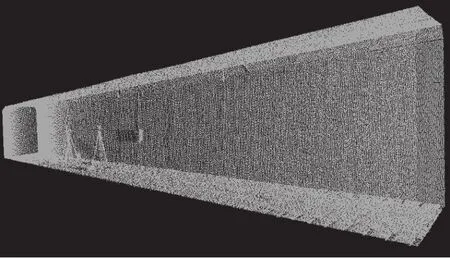
图3 处理后隧道点云
图4 处理后隧道点云
采用区段拟合方法对91个断面切片点云进行处理,提取断面中心,设置截取角度为3°,每个断面得到120个点云区段,每个区段包含约90个点,分别进行重心拟合得到区段中心,再由所有区段中心拟合得到断面中心。
3.2 变形信息提取与分析
对前后两期扫描中得到的隧道断面中心坐标分别在X、Y、Z 3个方向上进行差值比较,可知在Z方向体现为沉降变形,在X、Y方向表现为水平变形。结果如图5~7所示。
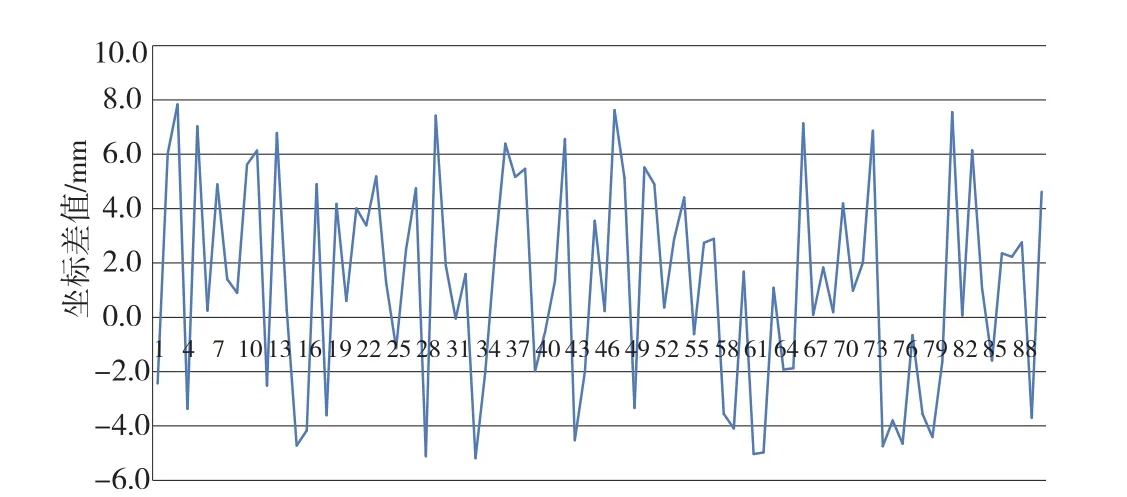
图5 横断面Z方向坐标差值
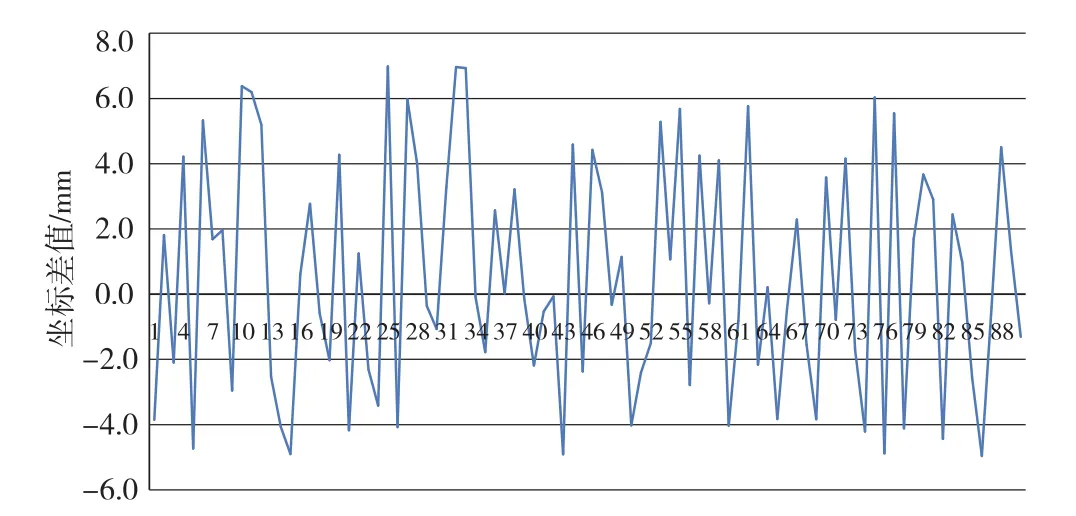
图6 横断面X方向坐标差值
P258
B
1672-4623(2016)04-0097-02
10.3969/j.issn.1672-4623.2016.04.030
2014-07-02。
猜你喜欢
云南画报(2021年11期)2022-01-18
文萃报·周五版(2021年45期)2021-11-17
科学与财富(2020年15期)2020-07-04
移动通信(2019年4期)2019-06-25
铁道通信信号(2018年8期)2018-11-10
铁道通信信号(2018年8期)2018-11-10
测绘通报(2017年2期)2017-03-07
铁道通信信号(2016年4期)2016-06-01
中国组织化学与细胞化学杂志(2016年3期)2016-02-27
世界博览(2015年20期)2015-09-10
