城市轨道交通视频障碍物探测系统简析
2017-01-05 03:54苏先辉
现代城市轨道交通 2016年6期
苏先辉
(合肥城市轨道交通有限责任公司,安徽合肥230001)
城市轨道交通视频障碍物探测系统简析
苏先辉
(合肥城市轨道交通有限责任公司,安徽合肥230001)
伴随我国城市化进程的不断加快,城市轨道交通呈现高速发展趋势。轨道障碍物危害性极大,其探测系统的研究成为相关领域研究热点。文章介绍了城市轨道交通视频障碍物探测系统,该系统基于双目测距核心技术,并辅以动态包络线技术、夜晚低照度增强技术及去雾霾增强技术,可实现复杂环境下的障碍物高度识别。
城市轨道交通;安全运营列车;视频处理;障碍物探测
0 引言
伴随我国经济的蓬勃发展以及城市化进程的不断加快,城市轨道交通以运量大、速度快、准时可靠、安全性强、节能环保等优势,在我国公共交通事业中发挥越来越大的作用[1]。然而,伴随城市轨道交通的高速发展,各类事故频发。影响城市轨道交通运营安全的主要原因有:轨道因素、车辆因素、供电因素、信号系统因素以及人为因素等。轨道因素中,轨道上障碍物极易带来列车破坏性撞击,甚至引发脱轨等严重事故,造成重大灾难和不可估量的损失[2]。
目前轨道障碍物检测研究主要针对铁路轨道,通过使用专用的轨道障碍物探测机车、采用固定于轨道沿线的探测设备,或者在列车车头安装障碍物自动检测设备进行探测,且检测环境多为露天、四周较空旷的直线轨道,检测对象多为体积较大的物体[3-4]。但城市轨道交通与铁路轨道所处环境差异较大,障碍物大多体积小,而传统检测手段在检测小型障碍物方面普遍存在盲区,极大地增加了障碍物探测难度[5-6]。
相比应用传统传感器的轨道交通控制技术,视频计算机处理技术是一个比较新的技术手段。在过去相当长的时间里,由于计算机技术的局限,不足以以合理的成本处理视频信息,以至于轨道交通领域并未使用视频处理技术。目前,计算机技术和通信技术经过发展,已经完全能够以合理的成本支撑视频处理技术在各个行业的实际应用。城市轨道交通视频障碍物探测系统可实现80~500 m 内、10个以上障碍物的快速识别,能够满足多种天气状况下的障碍物探测要求。该技术的研究将提高现代化城市轨道交通系统运营的安全系数,是未来轨道交通研究的热点。
1 视频障碍物探测系统关键技术
1.1 双目测距技术
双目测距技术是视频障碍物探测系统的核心技术。建立在图像增强与图像识别基础上的双目测距技术的核心思想是通过模拟人眼双目定位的原理,结合图像处理的其他技术,让计算机获得与人类一样的对世界的判断能力[7-8]。基本原理如图1所示。
双目测距主要是利用目标点在左右两幅视图上成像的横坐标存在的差异,即视差d,视差与目标点到成像平面的距离Z成反比关系,公式如下。

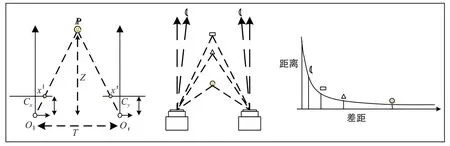
图1 双目测距基本原理
式(1)中,xl、xr分别表示P点在左右相机的像平面的投影点到成像面相机的水平距离。式(2)中,T为左右摄像头中心距;f为相机焦距。f和d的量纲均为像素点,T的量纲由定标板棋盘格的实际尺寸和用户输入值确定,一般以毫米为单位。
假设目标点P坐标为(x,y),目标点在以左摄像头光心为原点的坐标系中的坐标为(X,Y,Z),则存在上图所示的变换矩阵Q,使得Q*[xydl]' = [XYZ W]',在此为简化计算引入第4个分量W。

式(3)与式(4)中,cx和cy分别为左、右像平面的坐标系与立体坐标系中原点的偏移,Tx为摄像头中心距。
为精确求得某个点在三维空间里的坐标(X,Y,Z),我们需要获得的参数有焦距f、视差d、摄像头中心距T,还需要左右像平面的坐标系与立体坐标系中原点的偏移cx和cy。通常测试过程中,f、T、cx和cy可以通过立体标定获得初始值,并通过立体校准优化,视差d通过立体匹配求得。基于以上标定、校准和匹配得到基本参数,然后,根据公式(1)~(4)即可求得所需参量值。
1.2 动态包络线技术
通过双目测距技术建立起三维立体感的列车前方交通景象,在此基础上,通过建立动态三维包络线图,使障碍区外部参数可视化,如图2所示,明确列车前方哪些空间是列车将会行驶过的区域,再结合双目测距所得到的各个物体的三维位置,得以确定前方是否有障碍物。
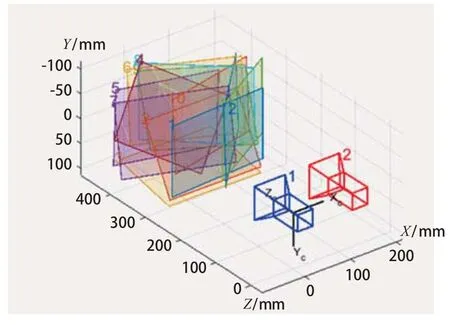
图2 外部参数可视化
1.3 夜晚低照度增强技术
水平在6、12h与C组比较显著升高(P<0.05),仅在12h与D组比较显著升高(P<0.05);C组与D
夜晚的视频信息经常因为补光不足造成夜晚的视频图像偏暗,很多信息丢失,严重时基本呈现全黑的情况。本系统通过软件算法,使丢失细节的画面重新恢复,将图像转化成适应人眼的色阶形式。增强效果如图3所示。

图3 夜晚低照度增强效果图
1.4 去雾霾增强技术
在雾霾天气,能见度较以往有不同程度的下降,这给监控系统造成很大影响。另外由于摄像机镜头沾染上灰尘和水气,也会造成能见度下降。本系统通过软件算法,使因雾霾所丢失细节的画面重新恢复,将图像转化成适应人眼的色阶形式。增强效果如图4所示。

图4 去雾霾增强技术效果图
2 视频障碍物探测系统优势
视频障碍物探测系统在障碍物识别精度方案及弯道解决方案两方面存在较大优势。
2.1 障碍物识别精度解决方案
视频识别是以可见光识别物体作为根本方式,其中能否识别物体的大小与探测距离是重要问题。目前视频障碍物探测系统能做到的识别范围是在列车行进中的动态包络线范围内,识别距离:80~500 m,最佳判断距离:80~300 m,识别物体个数:可同时跟踪10个及以上物体(对其中3个以上做重点跟踪识别),识别速度:小于0.2 s(6帧),识别物体大小与物体到列车车头的距离成正比,最小物体大小为摄像机成像的6个像素点。本系统不对目标物体的质感做出判断。
2.2 弯道解决方案
视频识别的基础是视频直线识别,原理上不能识别视线以外的物体。但通过尾灯识别法也可以实现超视距识别:前列车的尾灯发出红色光线,通过判断前方隧道壁的红色尾灯反光,可以超视距识别前方比较近的列车。由于红色是停止信号,所以可以排除误识别的可能性。本功能不影响视距内的其他判断模式与判断结果。
目前上海地铁应用了地面雷达防碰撞系统,本方案与雷达系统比较其优点在于:①识别速度快,反应速度小于0.2 s;②设备安装容易,只需要在列车车头位置安装设备;③在一条线路上可以混合使用,安装与未安装该系统的列车都可以正常工作;④无光线干扰/电磁干扰,安装在列车前方挡风玻璃后,列车内的可见光对车头没有影响,通过软件算法可以抑制隧道内的各种杂光;⑤具备行车记录仪功能,出现事故能分清责任;⑥列车前方图像增强,在雾霾天气状况下,可以提供经过提高3至5倍能见度的视频信息,为列车的安全行驶提供保障。
3 视频障碍物探测系统在城市轨道交通的应用
视频障碍物探测系统独立于电客车列车自动保护( ATP)系统,通过全新的视频处理模式,对现有行车的调度、安全起很好的补充作用、增强列车行驶的安全性;面向自动驾驶,为真正意义上的全自动驾驶提供更加符合人类习惯的运行模式;通过视频模式的障碍物探测系统,为将来把障碍物探测扩展成视频处理中心打下了坚实的基础。
目前,视频障碍物探测系统已在城市轨道交通领域获得应用,配置于城轨列车之上。系统由嵌入式车载主机和2台高清摄像机组成。嵌入式主机安装在驾驶台的机柜里,2台高清摄像机安装在列车驾驶室前方的顶端,考虑到需要看清楚远处地面的情况,摄像机尽可能安装在列车的高处,又考虑到适应轨道转弯情况下尽可能看远,在左右两边各安装1个摄像机。由于列车可以两个方向行驶,需在两端的驾驶室各安装1套。安装完成后通过对视频信息的分析可实现如下功能。
(1)追尾风险评估。在本车 ATP 切除时,根据实时测量的前后预先设定的车距安全阈值,评估追尾风险;可根据需要设置多级阈值。除了列车,也可以对轨道包络线内其他物体(障碍物)做判断。
(2)距离显示和示警。通过在列车驾驶室内的示警终端,向驾驶员提供测距距离和不同级别的警示及设备故障报警。
(3)其他功能。行车记录仪、雾霾天气图像增强等。
4 展望
在实现了视频障碍物探测以后,建立起视频采集、增强、识别和存储功能,未来还可以有2方面的提高。
(1)向视频自动驾驶发展。自动驾驶是城市轨道交通的重要发展方向。传统意义上,城市轨道交通是基于信号灯、传感器等控制下的统一集中调度系统。基于视频处理的控制系统由于处理数据量很大,在很长时间内计算机的处理能力不足以支撑。但随着计算机技术的发展,视频处理的速度和成本已经到了经济、可靠的程度,因此可以采用视频处理的方式为城市轨道交通的控制,乃至自动化提供支撑。
(2)城市轨道交通列车管理、控制视频化。除了障碍物探测可以实现视频化处理,列车的其他领域,例如受电弓监控、司机监控、乘客区域监控、轮轨监控都可以实现视频监控、视频识别等视频化控制,从而很好地为整个城市轨道交通的运营服务。未来还可以将障碍物探测扩展到高铁列车上。
[1] 陆明. 城市轨道交通系统综合效益研究[D]. 北京:北京交通大学,2012.
[2] 靳尚宇. 列车障碍物检测方法的研究[D]. 北京:北京交通大学,2015.
[3] 黄涛,吕红强,王维. 基于多技术融合的地铁列车障碍物检测系统设计[J]. 制造业自动化,2016(8):59-60,69.
[4] 梁少喆. 地铁障碍物与脱轨检测装置的设计与分析[D]. 北京:北京交通大学,2015.
[5] 侯晓轩. 地铁障碍物检测装置的设计及关键技术研究[D]. 北京:北京交通大学,2013.
[6] 翟国锐,胡春红,张立静. 障碍物及脱轨检测装置的可靠性设计[J]. 黑龙江科技信息,2014(34):155.
[7] 万一龙,柏连发,韩静,等. 低照度双目立体显著目标距离测定方法与实现[J]. 红外与激光工程,2015(44):1053-1060.
[8] 霍艳艳,黄影平. 基于立体视觉和光流的障碍物探测方法[J]. 信息技术,2013(1):125-127.
责任编辑 孙锐娇
Analysis of Video Obstacle Detection System of Transit
Su Xianhui
With the accelerating process of urbanization in China, urban rail transit presents a trend of rapid development. The research of the detection system has become a key research topic in the field of rail obstacles detection system. This paper puts forward a urban rail transit video obstacle detection system, the core of the system is based on binocular ranging technology, supplemented by the dynamic envelope contour technology, night low illumination enhancement technology and defogging enhancement technology, achieving high recognition of obstacles in complex environments.
urban rail transit, safe operation train, video processing, obstacle detection
U231
2016-06-12
苏先辉(1979—),男,工程师
猜你喜欢
铁道通信信号(2020年9期)2020-02-06
科学(2020年3期)2020-01-06
电子制作(2019年20期)2019-12-04
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2018年23期)2018-12-26
电子制作(2017年7期)2017-06-05
西安工程大学学报(2016年6期)2017-01-15
现代计算机(2016年11期)2016-02-28
西北工业大学学报(2015年3期)2015-12-14
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01