
新型组合式可转角爬壁机器人
2017-01-12 17:00龚雷锋赵一亭刘动盛露晨
物联网技术 2016年11期
龚雷锋++赵一亭++刘动++盛露晨

摘 要:鉴于人工爬壁进行高空作业的危险性过高等问题,设计了一款新型组合式可转角爬壁机器人。该机器人具有结构灵活、运动速度快、体积小巧,能够在较大曲面上工作等特点,可大大减少因爬壁工作造成人身安全事故发生,具有广阔的市场前景。
关键词:组合式可转角爬壁比机器人;结构灵活;体积小巧
1 作品研制背景
爬壁机器人是能够在垂直陡壁上进行作业的机器人,它作为高空极限作业的一种自动机械装置,越来越受到人们的重视。
但现有的爬壁机器人只能在一个单独的平整墙面上运动,不能转角,更不能吸附在曲面上,导致爬壁机器人的工作空间受到很大限制。
2 作品实现功能
该作品可实现如下功能:
(1)组合式结构设计可使机器人从一个墙面转过任何角度到达另一个墙面。
(2)爬壁机器人结构灵活、运动速度快、体积小巧,能够在较大曲面上工作。
(3)集成度高,设计新颖,可应用于众多领域,方便实现产品化,其易于推广。
(4)实现近距离稳定的视觉侦查与检测。
3 作品研制意义
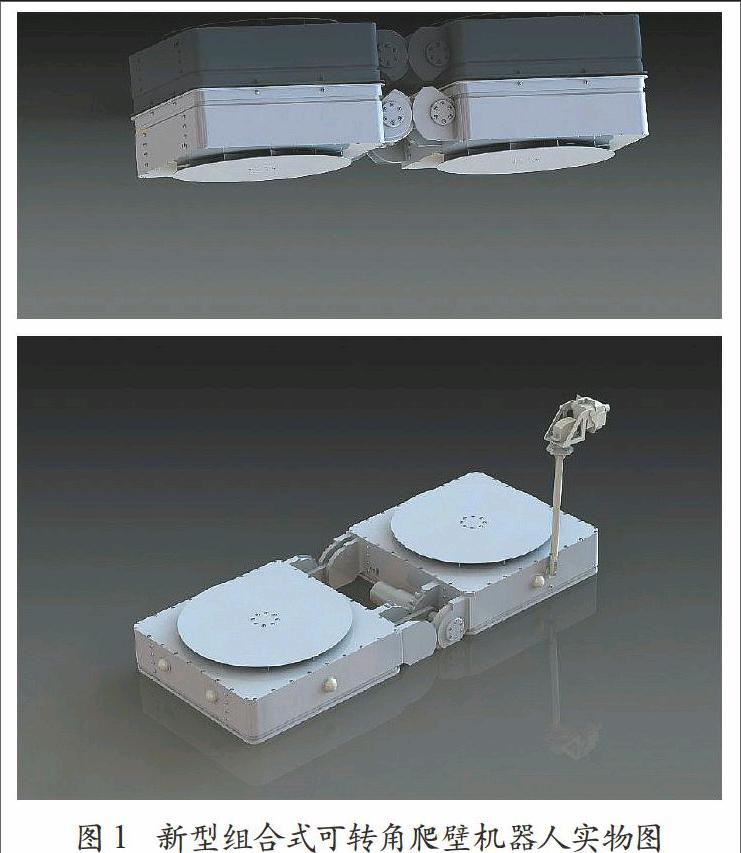
该新型组合式可转角爬壁机器人打破了传统爬壁机器人工作空间的局限性,扩大了爬壁机器人的活动范围。通过新颖巧妙的结构设计,使爬壁机器人运动更灵活,增强了其实用性。同时,集成设计使爬壁机器人更具产品化,增添了其推广的可行性。爬壁机器人实物图如图1所示。
图1 新型组合式可转角爬壁机器人实物图
4 整体方案
组合式可转角爬壁机器人主要是由两个经过结构优化的爬壁机器人通过在两个爬壁机器人连接处增加一个自由度并具有主动转角能力的构件来实现转角功能。
当组合式可转角爬壁机器人运动到外墙90度直角时,一个爬壁机器人运动到墙壁外缘直到悬空,接下来通过转角机构作用使一个机器人吸附在另一面墙上,紧接着停留在原来墙面上的机器人停止工作,转角机构再次作用使停留在原来墙面的机器人悬空,停留在另一面墙壁的机器人开始运动,随后两个爬壁机器人都移动到另一面墙壁。
5 细节方案
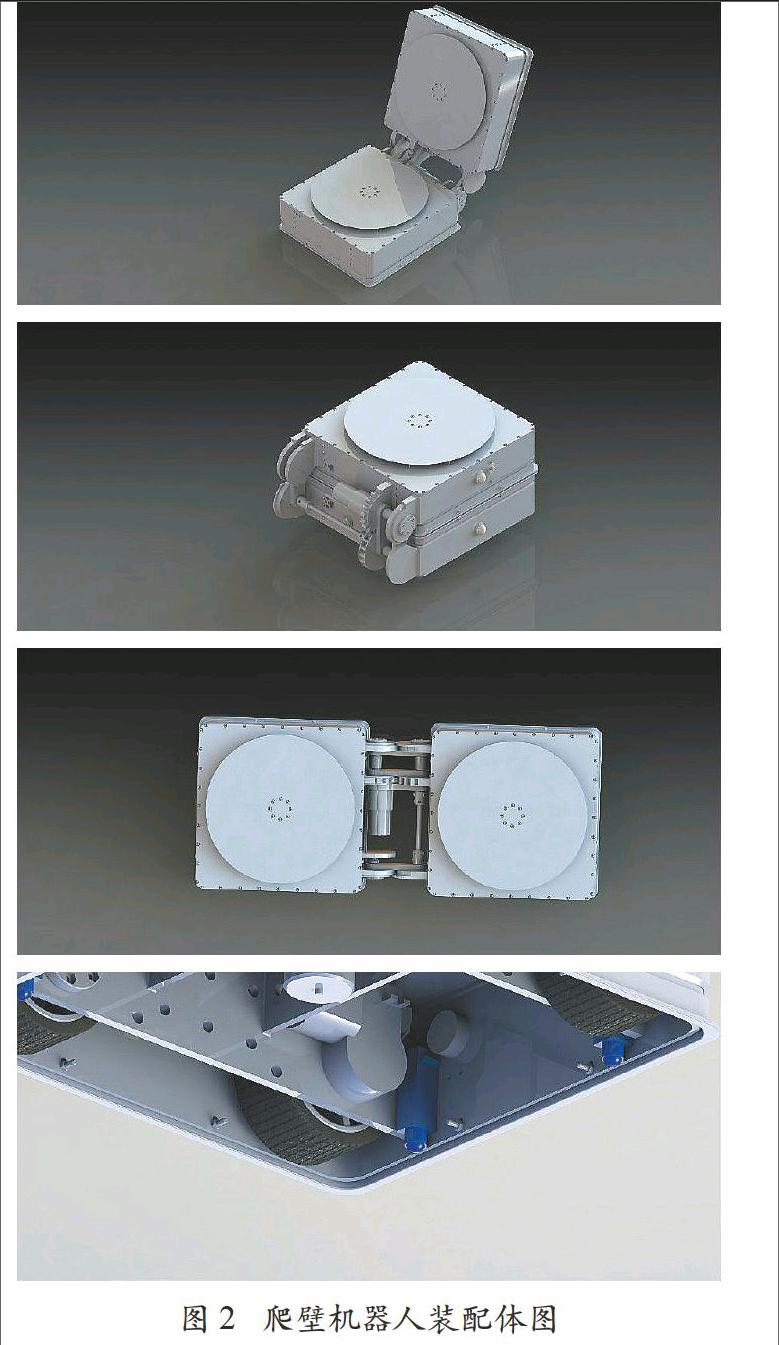
机器人通过装配体图中的机械机构实现转过直角的方案,并通过采用“径流式负压机”结构实现在墙壁上贴附。此结构具有低噪声的优点,选用此结构可为爬壁机器人的进一步应用提供基础,如警事侦查,要求低噪声等。通过装在爬壁机器人上的四个伺服减速电机的单独运动或组合联动来实现爬壁机器人的整体运动。爬壁机器人装配体图如图2所示。
6 创新性
在机器人的每个模块上加装4个压力传感器组,以使负压机能够智能调节产生的压力。这样不仅可以保证机器人安全工作,还可以使机器人在保证安全工作的前提下,使耗能达到最低。为扩大机器人的实际应用范围,在机器人上加装了摄像头和夜间照明灯。通过独特、简洁的转角机构,使得机器人的两个模块可以折叠在一起,大大提高了机器人的便携性。通过组合式的结构设计使机器人能从一个墙面转过90度墙角到达另一个墙面,扩大了爬壁机器人的工作范围。由于机器人具有集成度高、体积小等特点,以此可以在大桥桥柱这样较大的曲面上工作。此外,该款机器人还具有运动快速平稳、噪声低、隐蔽性强、更靠近检测对象等特点,具有较高的工作精准度。
7 市场前景
由于可转角爬壁机器人具有设计巧妙新颖以及运动灵活、体积小巧等特点,极具趣味性,可应用于益智娱乐玩具模型领域。该机器人具有低噪声低的特点,隐蔽性强,在机器人上加装摄像头等传感装置后可来进行警事侦查,对于维护社会安全具有重要意义。且该机器人的吸附力度可根据不同场合,配合相应专业传感器应用于以下几个方面:
(1)核工业:对核废液储罐进行视觉检查、测厚、探伤等;
(2)石化企业:对储罐的内表面进行检查、除锈等处理;
(3)电力行业:电站锅炉水冷管壁厚的检测等。
(4)建筑行业:多种桥梁等建筑的检测。
此外,近年来化工厂及建筑工地的安全事故使我们损失惨重,对这些场所的安全监测必不可少,可转角爬壁机器人具有智能化、检测稳定、精准度高、工作安全可靠等特点,市场前景广阔。
猜你喜欢
力学学报(2022年6期)2022-07-10
数学小灵通(1-2年级)(2021年4期)2021-06-09
中国特种设备安全(2021年12期)2021-04-26
当代陕西(2020年17期)2020-10-28
孩子·小学版(2020年1期)2020-01-19
摄影之友(影像视觉)(2018年12期)2019-01-28
小学生导刊(2017年17期)2017-05-17
学苑创造·A版(2017年5期)2017-05-09
广东石油化工学院学报(2016年6期)2016-05-17
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
