面向家庭的服务型机器人的设计与实现
2017-02-07 13:05韩喆贾宁
软件 2016年7期
韩喆+贾宁
摘要:本文实现一个面向家庭的服务型机器人,利用智能机器人和手机端控制将用户从这些繁琐的家庭劳动中解脱出来。通过利用此设备,可以帮助用户控制机器人上安置的摄像头,利用Android手机客户端或PC端远程监控家中的环境信息。此外,利用机器视觉实现家中信息自助获取、图像绘制,通过WIFI接收图片信息,利用face++进行人脸分析,或者图片分析。从而实现自主避障、清洁等功能。此机器人包括以下四种运行模式:红外模式、跟踪模式、边沿模式、人为控制模式。其中,前三种模式通过特定的传感器实现机器人的行走与清洁。人为控制模式则是利用手机客户端进行定性的控制。用户可根据实际情况自主选择模式进行机器人的使用。
关键词:服务型机器人;实时监控;手机客户端;运行模式
引言
随着科学技术的进步,机器人开始在各种领域大展身手,除了在军事、航空、制造等传统领域之外,近年来机器人开始在医院、家庭等服务行业开展广泛的应用,普通机器人既能接受用户的方向性指挥,又可以运行预先编排的程序,依靠其高度自动化,为用户提供服务。
目前,机器人除了依靠传统的位置、速度、加速度等传感器外,视觉、触觉、声觉等多种传感器的融合技术已经开始成熟应用于机器人之中,加之元器件的高度集成,体积的急剧缩小。这些因素导致服务型机器人的流行,机器人使用这些集成的传感器去感受用户的需求,去适应、学习周边的家庭环境。用户通过使用这种机器人把用户从繁重的家务劳动中解放出来,而在家庭劳动需求中,卫生扫除占据70%以上。因此很多商家将机器人的服务视角放到打扫机器人身上,但是由于开发时间短、市场需求量大、造价高、有安全隐患等因素,导致以打扫为主的服务型机器人有很大的市场空间和市场潜力。而目前市场上的打扫机器人,底盘操作的噪音较大,若使用普通的遥控器,容易丢失,而且充电麻烦,浪费电池。
基于以上问题,本文设计了一款服务于家庭的扫地机器人,用户可以使用Android手机对机器人进行控制,方便而且节能,同时此机器人提供多种工作模式,用户可根据自身情况进行模式挑选,而且产品造价成本低廉,适应于经济型家庭进行选择。
2服务型机器人硬件设计
此服务型机器人采用增强型的51内核单片机STCllF32XE,低功耗,可抗干扰,内置双路全桥驱动电路,利用舵机实现摄像头的转动,利用红外、雷达传感器代替机器人的触觉,用了3个锂电池为小车提供动力。
2.1设计思路
传统的打扫过程在打扫角落环节中,需要浪费大量的时间,随时产生的垃圾、床底黑暗角落,扫起来非常麻烦。
此机器人融合若干传感器的功能,实现硬件与软件之间的实时通讯,快速传递信息,完成用户的需求。
此机器人可以通过Android手机进行控制,利用摄像头查看较低位置的死角,之后控制机器人去清洁死角。此外,可以利用跟踪模式,清理新产生的垃圾。
现在市场上的机器人用圆盘吸尘,尽管吸尘效果好,但是产生的噪音大,所以此机器人采用传统的拖布,可以随时更替,且噪音较小,同时使用Android手机客户端代替传统的遥控器进行实时控制,充电方便,而且更加环保。面对家中的障碍物和特殊情况,可以设计不同的响应模式,方便用户自主选择。
2.2硬件设计
此机器人提供了舵机、充电、红外、雷达、充电器、WiFi模块接口和马达,大容量电池提供电量,增加了流水灯、提醒等功能,通过WIFI模块、UDP通讯方式、Android手机进行稳定通信。图1是此机器人的硬件结构图。图2是机器人的通讯接口图。
2.3机器人运行模式
根据用户的需求,此机器人包含以下几种运行模式:
1.避障模式:躲避家中的障碍物,随机清扫卫生,利用红外进行对周边事物的感应,用左右舵机加减速来避障碍物;
2.控制模式:通过Android手机发送WIFI指令,实现对机器人的控制;
3.边沿模式:边沿打扫功能,通过控制行进角度避免损害障碍物,同时进行死角打扫,利用红外和雷达,先调整机器人即将行进的角度,再进行边沿行进,确保不会碰到障碍物;
4.跟踪模式:可以根据跟踪模式,跟随用户进行实时方位的清洁,通过雷达控制距离,通过红外调整方向,通过摄像头来判断是否跟踪人或是物品。
5.监控模式:利用WIFI模块,通过UDP方式进行家中实时环境的监控。
3服务型机器人软件设计方案
此机器人的软件设计主要针对Android手机客户端,软件的主界面可接收实时传来的摄像头视频数据,可以通过按键让手机拍下当前以摄像头为第一视角的图片。
主界面上有选择功能模式的4个按钮,可以选择机器人的运行模式,如:避障模式、边沿模式、跟随模式等,同时可以前、后、左、右控制机器人的行为,也可以利用上、下、左、右4个键来控制摄像头调整监控视角,此外,加速、减速两个按钮可以控制机器人的行动速度。
3.1跟踪功能
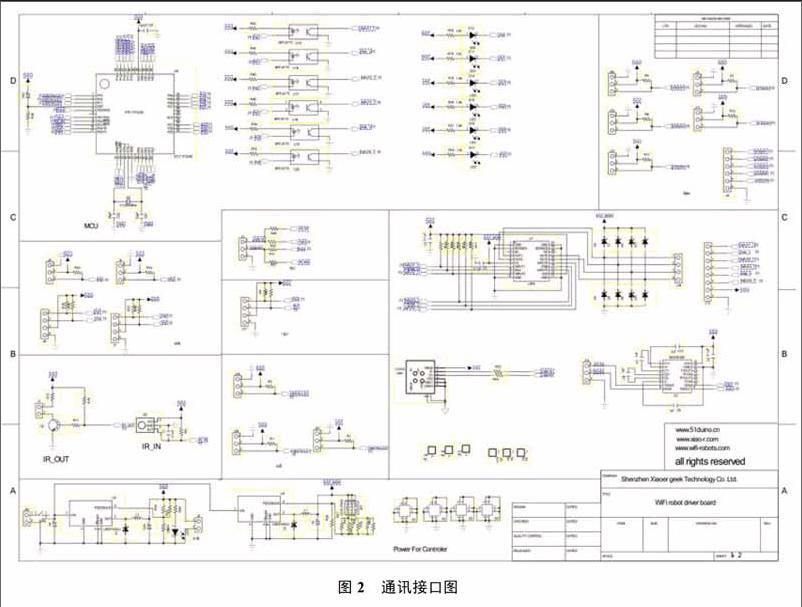
跟踪功能的主要对象是操作用户,此机器人可以跟随用户的脚步,进行即时移动和清洁。
此功能的设计思路是,利用Android手机客户端发送指令开启此功能,利用不同传感器返回的距离值进行判断,利用红外传感器控制、跟踪用户的方向,利用返回值判断前方有无障碍物,利用雷达控制机器人和用户之间的距离,利用摄像头判断是否正确跟踪用户。使用face++功能识别用户面部,判断跟踪是否正确。图3是跟踪功能的流程图。
3.2避障功能
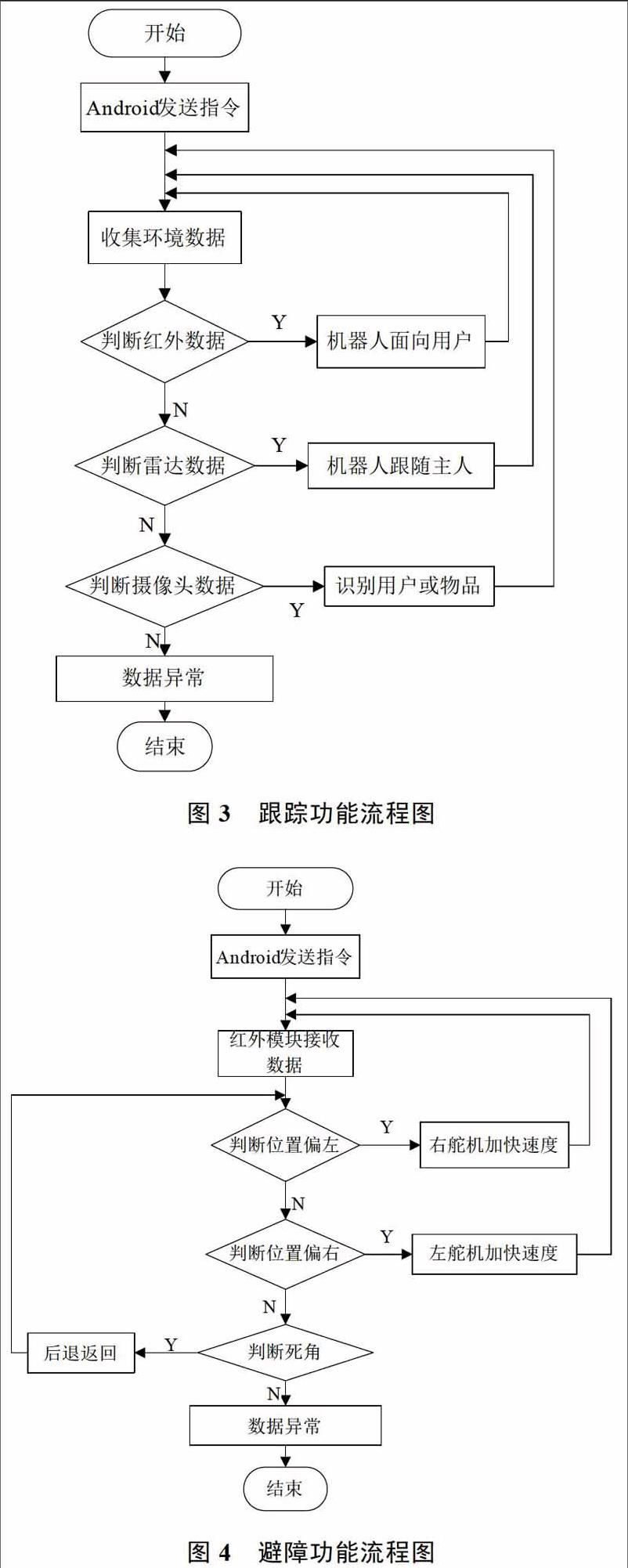
此功能主要利用红外模块进行判断前方、左右有无障碍物,对周边环境的进行预判。
此功能的实现思路是,当前方、左右无障碍物时,进行正常行进;当右边有障碍物时,左舵机加速移动;当左边有障碍物时,右舵机加速移动;当卡入死角时,先后退到安全距离,然后判断左右障碍物的距离,进行左右偏转后行进。图4是避障功能流程图。
4结论
此服务型机器人采用红外、雷达、摄像头等模块,结合Android手机客户端,实现对家庭的清洁管理与监控。此外,该机器人清洁过程的分贝较低,而且操控方式简单,只需手机安装应用程序即可直接操控机器人,为了方便用户使用,此机器人提供多种模式可供用户选择。
以上优势均为此服务型机器人设备的推广提供了良好的基础,在此版本机器人的基础上,设计者将进一步增加客户端的类型与机器人的功能,为用户提供更好的操作体验。
猜你喜欢
中国新通信(2016年22期)2017-01-13
经济研究导刊(2016年30期)2016-12-24
山东工业技术(2016年23期)2016-12-23
商情(2016年43期)2016-12-23
科教导刊(2016年29期)2016-12-12