
电动机拖动的启闭机荷重开度检测系统研究
2017-02-08 01:16乔爱民何博侠罗少轩黄迎辉王艳春
农业机械学报 2017年1期
乔爱民 何博侠 罗少轩 黄迎辉 王艳春
(1.蚌埠学院电子与电气工程学院, 蚌埠 233000; 2.南京理工大学机械工程学院, 南京 210094)
电动机拖动的启闭机荷重开度检测系统研究
乔爱民1何博侠2罗少轩1黄迎辉1王艳春1
(1.蚌埠学院电子与电气工程学院, 蚌埠 233000; 2.南京理工大学机械工程学院, 南京 210094)
荷重开度一体式传感器安装在电动机输出轴与启闭机的动力输入轴之间,可以输出包括启闭机实际负载引起的总力矩及用于开度检测的计数脉冲等电信号,同时起到联轴器的作用。通过次级旋转的变压器耦合及光电耦合方法分别实现了传感器内部旋转电路的供电及总力矩与开度脉冲等电信号的非接触传输。为了从一体式传感器输出的总力矩信号中获取启闭机的实际负载,荷重检测分为2个阶段,首先利用灰色关联校正环节对传感器内部弹性轴所受总力矩对应的模数转换(ADC)输出值进行校正,将获得的趋于稳定的ADC校正值作为第1阶段实际输出值,并将该输出值作为输入变量,在第2阶段,分别利用最小二乘支持向量回归(LS-SVR)和偏最小二乘回归(PLSR)方法实现对启闭机负载的回归预测,再通过灰色关联校正环节对该负载预测值进行校正得到最终的启闭机实际负载。试验结果表明,结合灰色关联校正方法,采用LS-SVR的启闭机实际负载回归误差在±0.6%范围内,利用PLSR的启闭机负载回归误差在±1%范围内。同时,由于荷重开度一体式传感器与电动机输出轴直接连接,在启闭机升降过程中,输出的开度计数脉冲数增加,提高了开度检测分辨率,实际开度分辨率远小于1 mm。
启闭机; 荷重开度; 检测系统; 电动机拖动
引言
启闭机类型可分为:液压启闭机、卷扬式启闭机、螺杆启闭机等[1-6],其中后2种为电动机拖动型,是许多农田水利工程中必不可少的设备[3-4]。近年来,我国在各地农田水利工程中推进现地自动控制、远程监控、定量供水以及智能化管理系统等建设[1,5],在这些启闭机应用工程中,荷重和开度检测是非常重要的环节。目前,固定卷扬式启闭机的荷重和开度检测分别采用荷重传感器和多圈绝对值型编码器实现,2种传感器安装在不同位置,且荷重检测传感器安装和维护时需要脱开闸门及辊筒等重型负载,不便于安装和维护;螺杆式启闭机的荷重检测则一直没有很好的解决方案,目前很多螺杆式启闭机应用工程中,由于没有荷重检测,常出现因为启闭机负载过大而导致螺杆顶弯等事故的发生[4-5],文献[1]提出了一种基于通过蜗杆的来回间隙攒动,带动曲轴机构的扭转来检测闸门实际荷重,但存在着较大的缺陷。本文研究一种电动机拖动的启闭机荷重开度检测系统。
1 启闭机荷重开度检测方法
1.1 启闭机荷重开度信息的获取方法
启闭机的荷重和开度信息由荷重开度一体式传感器获取,传感器安装在电动机输出轴及启闭机的动力输入轴之间,图1为电动机拖动的启闭机安装一体式传感器的示意图。传感器内部弹性旋转轴上贴有电阻应变片并将之组成惠斯登电桥,可将启闭机工作时作用于弹性轴上的总力矩近似按线性规律转换为标准的变送信号,同时输出开度计数脉冲用于对启闭机开度检测。由图1可知,荷重开度一体式传感器同时起到联轴器的作用,安装及后期维护非常方便。
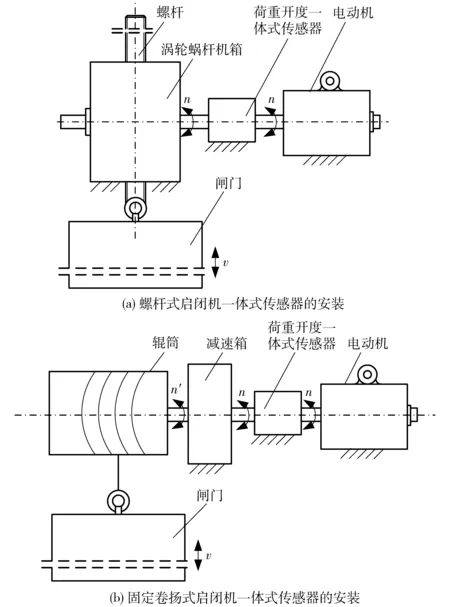
图1 荷重开度检测传感器安装示意图Fig.1 Diagram of hoist installed with sensor of load and opening
1.2 启闭机荷重开度检测需要解决的问题
(1)如图1所示,荷重开度一体式传感器的外壳固定,荷重检测主要通过对传感器内部弹性轴上的电阻应变片及其电桥输出的总力矩电信号变换实现,开度是通过结合传感器输出的开度计数脉冲数及启闭机的相关参数间接计算得到,而弹性轴相对于外壳旋转,部分力矩信号变换电路和开度计数脉冲产生电路固连于弹性轴上并与之同时旋转,将荷重和开度相关的总力矩及开度计数脉冲等电信号实现非接触传输是必须要解决的首要问题。
(2)由于荷重开度一体式传感器安装在启闭机的动力输入端,输出的总力矩信号既包括启闭机工作过程中实际负载引起的力矩,也包括了机构本身的摩擦力等其他因素在启闭机工作过程中产生的附加力矩,而附加力矩具有波动性及随机性,从荷重开度一体式传感器的输出总力矩信号中获取启闭机的实际负载是另一个需要解决的关键问题。
2 荷重开度一体式传感器工作原理
2.1 荷重开度一体式传感器结构
图2为一体式传感器的原理和结构简图。传感器的供电电源为直流24 V,采用旋转变压器耦合的方法解决和弹性轴同时旋转的电桥等电路供电问题。传感器的端盖、外壳、弹性轴及轴承等都是具有导电导磁性能的金属材料,作为旋转变压器的导磁磁芯,变压器的初级线圈与外壳固定,次级固定在弹性轴上和弹性轴一同旋转。由振荡电路给初级线圈提供占空比为50%的恒定频率脉冲电源,在初级的激励之下,旋转变压器次级产生具有一定带载能力的脉动直流电源,经过整流及稳压后获得稳定的直流电源,供电桥及与弹性轴同时旋转的电路供电。

图2 荷重开度一体式传感器工作原理及机构示意图Fig.2 Principle and structure diagrams for integrate sensor of load and opening for hoist1.端盖 2.变压器初级驱动电路板 3.旋转变压器初级 4.旋转变压器次级 5.外壳 6、15.挡圈 7.光电开关 8、18.红外接收板 9.轴承 10.弹簧垫 11.弹性轴 12、13.红外发射板 14.红外发射管 16、19.光电开关 17.红外接收管

图3 弹性轴及电阻应变片贴片示意图Fig.3 Diagram of flexible shaft stuck with resistance strain gauge
一体式传感器通过其弹性轴连接电动机与启闭机,在弹性轴上贴有8片金属电阻应变片,用于感应弹性轴所受的总力矩,由应变片组成的电桥将总力矩线性变换为毫伏信号,通过幅值放大及电压/频率(V/F)转换为频率信号驱动红外二极管发射脉冲频率红外光,在与传感器端盖固定的红外接收板上,焊接多个红外接收三极管,均匀分布在与红外二极管同直径的圆周上用于接收红外二极管发出的脉冲红外光,经过频率电压(F/V)转换将之转换为0~5 V的电压信号对外输出。
图2中的挡圈最外端制成齿数为60的齿状,并与可旋转的红外发射板固定在一起,在红外接收板上按图3焊接2个光电开关。当电动机旋转时,挡圈转动,2个光电开关输出脉冲信号,由变换电路对该脉冲信号进行处理,最终得到弹性轴每旋转一圈可产生60个具有旋转方向辨别功能的开度计数脉冲输出。
2.2 荷重和开度信号变换及非接触传输
2.2.1 荷重信号变换及传输
(1) 总力矩信号变换
启闭机在升降过程中,其负载及其他因素引起的总力矩可等效为启闭机动力输入端的总力矩Mz,电动机提供的动力矩设为Md,当弹性轴转速为n恒定时,有Md=Mz。
为简化分析,假定弹性轴为内外径恒定的空心轴,根据材料力学可知,与轴线方向为±45°的轴外表面受到的应力为最大值和最小值,且方向相反,即一个受拉力,另一个受压力[7]。图3中的R1~R8为金属应变片,沿轴中心线呈±45°方向贴片。按照图3的布片方式,根据惠斯登电桥的组桥原则将应变片组成差动电桥,工作时各应变片的电阻变化量基本相同,并设各应变片原始电阻相等,当弹性体如图3受力时,根据电阻应变效应,可得到电桥输出与总力矩之间的关系式为
(1)
式中E——弹性轴的弹性模量μ——泊松比S——电阻应变片的灵敏度系数Ui——电桥电源电压Uo——电桥电压输出
由式(1)可知,总力矩与电桥的输出为线性关系。
(2)总力矩信号的非接触传输
总力矩的信号变换及红外发射电路位于可旋转的红外发射电路板上,红外发射电路板上的电路供电由旋转变压器的次级输出经整流滤波后得到的稳定直流电源提供。为实现与总力矩对应的电信号非接触传输,先对其进行幅值放大再进行V/F转换,由频率信号驱动红外光电二极管输出脉冲频率红外光信号,其电路见图4。

图4 总力矩信号V/F转换及红外发射电路Fig.4 Circuit of V/F conversion for total torque and infrared emission
利用仪器放大器AD620对电桥输出的差动毫伏信号进行放大,当电桥平衡时,AD620输出2.5 V。由芯片AD537将AD620的输出电压转换成频率信号,并驱动三极管Q1使红外发射二极管DS1~DS7发射脉冲频率红外光,其频率Fout和电桥输出电压之间的关系为
(2)
调节电位器Rz和Rg,使得当总力矩为0时输出频率为10 kHz,最大正向总力矩对应频率为15 kHz,最大负向总力矩对应的频率为5 kHz。
红外接收三极管Q1~Q12按图2所示均匀焊接在红外接收板上,用于接收红外二极管发射的脉冲频率红外光信号,并对红外三极管输出信号进行整形、F/V变换等处理,其电路见图5。

图5 总力矩信号红外接收及F/V转换电路Fig.5 Circuit of infrared receiving and F/V conversion for total torque
红外接收板与可旋转的红外发射板之间保持一定距离,红外三极管Q1~Q12均匀排列在如图2所示的圆周上,可保证红外发射板在旋转过程中红外三极管能可靠接收到脉冲频率红外光。图5中,由U5、R12和C13组成的单稳态触发器对红外三极管的输出信号进行整形,并由LM331实现F/V转换,再通过AD620将其变换为标准的0~5 V信号。图5中的电压输出Vout与脉冲红外光的频率Fout之间的关系为
(3)
式(3)中电压输出可通过电位器Rz及R13调节,使得0 V对应弹性轴受到最大负向总力矩,2.5 V对应弹性轴空载状态,5 V对应弹性轴受到最大正向总力矩。
2.2.2 开度信号变换及传输
可旋转的挡圈相对光电开关运动可产生开度计数脉冲输出,挡圈与光电开关的焊接与布置见图2。电动机旋转时带动挡圈旋转,通过与齿顶齿槽等宽的挡圈配合,每个光电开关输出等间距的脉冲。为了辨别电动机的旋转方向,2个光电开关安装在开度脉冲信号相隔1/4周期处[8],并对两路脉冲信号分别进行整形,结合辨向电路实现对弹性轴旋转方向的辨别。

图6 开度计数脉冲信号变换电路Fig.6 Conversion circuit of pulse signal for opening detection
由图6可知,当红外发射板相对红外接收板逆时针旋转时,顺时针计数脉冲CW输出始终为低电平,逆时针计数脉冲CCW有脉冲输出;反之则CW有脉冲输出,CCW无脉冲输出。结合CW/CCW的数量并配合启闭机的相关参数如速比、辊筒直径等可以计算启闭机的实时开度。
3 启闭机荷重开度检测系统
3.1 检测系统硬件
图7为启闭机荷重开度检测系统的硬件结构。采用内核为ARM Cortex-M3的STM32F103作为微控制器,其内部资源丰富。荷重开度一体式传感器输出的0~5 V信号经滤波等处理后,由24位Σ-σ型AD7190实现AD转换,CW/CCW开度计数脉冲信号经逻辑电平转换后接入MCU的TIM1和TIM2定时计数器,通过设置全局开度脉冲计数变量实现对CW/CCW脉冲的加/减计数,同时为实现检测系统对启闭机开度信息的断电保持,采用串行SRAM保存与开度相关的数据并用后备电池对SRAM芯片供电,并配置必要的显示、键盘等人机接口及串行通信等功能。

图8 采用灰色关联校正及回归处理的荷重检测示意图Fig.8 Diagram of hoist load detection combined grey correlation correction with regression

图7 启闭机荷重开度检测系统电路框图Fig.7 Hardware structure diagram of system for hoist load and opening detection
3.2 检测系统软件设计
启闭机的实时开度计算可结合开度计数脉冲数与启闭机的相关参数实现,检测系统软件设计的关键为如何从传感器输出的总力矩电信号中得到启闭机的实际负载。
传感器检测到的总力矩既包括由于启闭机实际负载引起的负载力矩,也包含其他因素产生的附加力矩,其中,负载力矩在实际负载不变时其值不变,而其他因素产生的附加力矩则具有波动性和随机性,由于启闭机的实际负载是通过对总力矩对应的AD转换值进行回归获得的,如果直接通过对总力矩信号实施启闭机实际负载的回归,其精度必将受到较大影响,因此,在系统的荷重检测过程中,首先应对总力矩对应的AD转换值进行校正,然后再对其校正值进行负载回归,在负载回归模型的基础上进一步对回归预测值进行校正,得到最终的启闭机实际负载。因此,为了从总力矩信号得到启闭机的实际负载,采用基于灰色关联的偏差校正环节对传感器总力矩信号输出的波动性和随机性进行抑制及校正,系统的荷重检测示意图如图8所示。
启闭机荷重检测分2个阶段进行,图8中,Q为第1阶段期望输出,ur为第1阶段灰色关联校正的校正量,uc为第1阶段常规控制模式下的输出量,Y为第1阶段实际输出。T为第2阶段的期望输出,Tr为第2阶段灰色关联校正的校正量,Yo为第2阶段的实际输出。
第1阶段,给启闭机施加固定负载,选择起始时间段内AD转换序列的集合平均作为期望输出,并将其扩展为元素,为该集合平均常值期望数据数列Q,选取某时间段内的AD转换数据序列作为比较数据数列,通过常规控制如低通滤波等得到的值uc与灰色关联校正环节得到的值ur叠加作为第1阶段的实际输出Y,由于Y对Q具有跟踪作用,得到的实际输出Y波动性及随机性会大大降低,可以有效抑制由于非实际负载引起的AD转换值波动。第2阶段,将第1阶段的输出Y作为输入变量,通过回归模型预测启闭机的负载,并进一步采用灰色关联校正环节对该预测负载进行校正,得到最终的启闭机负载输出Yo。
3.2.1 启闭机荷重检测的灰色关联校正模型
灰色关联分析是寻找一种能够衡量系统各因素间的关联度,通过事物或因素时间序列曲线间的几何形状相似水平来判别其紧密性[9-12]。由于固定负载引起的力矩理论上是不变的,将常值数据序列作为期望数据数列,采用灰色关联校正可使得期望输出和实际输出间的误差变小。以荷重检测第1阶段来说明灰色关联校正模型的建立,第2阶段模型建立方法类似。
给启闭机施加一恒定的负载,由于其引起的力矩理论上不变,将校正前的第1个τ时间段内的n个数据序列经低通滤波及平均等处理后得到的数值作为期望输出,并将其扩展为1×n的输出期望数据序列{Q(τ-n+1),Q(τ-n+2),…,Q(n)},其中Q(i)为常数,总力矩对应的AD转换值在τ时刻及其前n个数据组成实际输出序列{Y(τ-n+1),Y(τ-n+2),…,Y(n)},将期望数据序列作为参考数据序列,实际输出序列作为比较数据数列,计算两数据数列间的灰色关联度。实际输出数列与参考数据数列越接近,表明两者灰色关联度越高,灰色关联补偿量ur就越小,否则,ur就越大。
(1)计算参考数据数列Q(i)与比较数列Y(i)之间的绝对差值,即
Δτ=|Y(τ)-Q(τ)|
(4)
(2)计算τ时间段内绝对差值的最大值为
(5)
(3)参考数据数列的累减数据序列Q′(τ)与比较数据数列的累减数据序列Y′(τ)分别为

(6)

(7)
(4)求累减数列Q′(τ) 及Y′(τ)之间的最大绝对差值为
Δ′τ=|Y′(τ)-Q′(τ)|
(8)
(5)结合上述步骤,确定灰色关联校正模型为
(9)
其中
式中α——非负校正系数,其值决定校正的强弱
n——数据序列的维数
ε——灰色关联分辨系数,一般取0.5
λ1、λ2——权重系数,通常情况下λ1>λ2,具体取值根据荷重检测结果进行调整
当期望输出大于实际输出时,校正量为正值,两者相等时补偿量为0,否则,补偿量为负值。
3.2.2 启闭机实际负载的回归
应当指出的是,由于图8中Y的数值是经过灰色关联校正对应于总力矩的AD转换校正值,对于一般的启闭机而言,通过力矩实现对实际负载的标定比较困难,为了获取启闭机的实际负载,需要进一步对第1阶段的AD转换校正值Y进行回归。
最小二乘支持向量回归(LS-SVR)是机器学习的一个重要方法,在离散时间序列的预测研究中,经典的支持向量回归算法(SVR)已经得到很好的验证[13-14],在标准的SVR基础上,LS-SVR改进了SVR的算法,克服了经典SVR算法的训练速度慢等问题[15-16]。偏最小二乘回归(PLSR)是一种基于统计理论的回归分析方法,目前已经广泛地应用于多个领域并取得了很好的效果[17-22]。为了从总力矩信号中获取启闭机的实际负载,并验证其回归的效果,分别用LS-SVR及PLSR对第1阶段的Y值进行启闭机实际负载回归。
3.2.2.1 启闭机荷重的最小二乘支持向量回归
(1)分别给启闭机施加不同的负载,得到对应不同负载的第1阶段AD转换校正值Yi,对其在满开度区间进行均值处理得到Y′i,对应的启闭机实际负载为Ti,将Y′i及Ti作为训练样本集{(Y′i,Ti)} (i=1,2,…,N),Y′i为回归模型的输入量,Y′i∈RN。通过非线性映射φ(·)将N维样本输入映射到高维特征空间,用LS-SVR定义优化问题
(10)
式中ξi——非线性系统模型样本的回归误差γ——正则化参数b——偏差变量ω——权矢量
引入拉格朗日乘子ai,将式(10)的条件约束优化转换为无条件约束优化
(11)
分别对式(12)的变量ω、b、ξ及a求偏导并令其值为0,消去ω、ξ,得到线性方程组
(12)
其中
E=[1 1 … 1]TK=φ(Y′i)Tφ(Y′j)
T=[T1T2…TN]T
选取径向基核函数
(13)
得到启闭机实际负载的LS-SVR非线性预测模型
(14)其中,正则化参数γ和核参数σ2的选取用文献[16]中的混沌粒子群(CPSO)方法。
(2)将LS-SVR模型得到的第1个时间域τ内的预测值作为期望输出,再根据灰色关联校正原理,进行第2阶段的灰色关联校正得到启闭机的最终负载输出值Yo。
3.2.2.2 启闭机荷重的偏最小二乘回归
一般来说,启闭机的实际负载和第1阶段输出的AD转换校正值Y并不呈线性关系,因此,在启闭机负载与自变量为第1阶段等效输出之间的关系式中适当增加自变量的非齐次项,可提高启闭机负载的回归精度。将第2阶段预测的启闭机负载作为单因变量y,y=T,记第1阶段的等效输出值为n,n=Y′,以n1/2、n、n3/2、n2、n5/2作为自变量,并计x1=n1/2,x2=n,x3=n3/2,x4=n2,x5=n5/2。将启闭机的满开度区间等分为k等份,分别求出各等份区间内的等效输出值,给启闭机施加l个不同的固定负载,在满开度范围内获得自变量和因变量的样本数据X及Y,其中Xu×5为解释矩阵,Yu×1为响应矩阵,u=kl。按照降序及交叉有效性原则,对样本矩阵X进行标准化处理,并从标准化处理后的矩阵中依次选择使方差Var(ti) 和协方差Cov(ti,y) 都尽可能大的成分t1,t2,…,th(h≤5),然后通过建立y与t1,t2,…,th的回归方程最终得到y与x1,x2,…,xh的回归方程式。
(1)将矩阵X与因变量Y进行标准化处理,得到标准化变量矩阵E0和列向量ξ0,即
(15)
其中
式中μjx、Sjx——第j个自变量xj的样本均值和样本标准差
μy、Sy——因变量yj的样本均值和样本标准差
(2)从E0中提取第1个成分
(16)
并执行E0和ξ0对第1个成分t1的回归
(17)
其中
式中p1、r1——回归系数E1、ξ1——回归方程的残差矩阵和向量
(3)继续提取第2个成分t2,并执行E1和ξ1对第2个成分t2的回归
(18)
(19)
其中
式中p2、r2——回归系数E2、ξ2——回归方程的残差矩阵和向量
(4)继续提取成分,设得到m个成分t1,t2,…,tm,并执行ξ0对m个成分的回归,即ξ0=r1t1+r2t2+r3t3+…+rmtm,最终将之还原成原始变量的形式,得到启闭机负载回归模型
y=α0+α1x1+α2x2+…+α5x5
(20)
式中α0——回归截距α1、α2、…、α5——对应原始自变量和原始因变量间的回归系数
在PLSR建模过程中,成分数目选取采用交叉有效性原则,具体方法见文献[22]。
(5)将PLSR模型得到的第1个时间域τ内的预测值作为期望输出,在第2阶段进一步进行灰色关联校正得到启闭机的最终负载输出值Yo。
4 结果分析
试验平台如图9所示,采用NQPL-80KN-4.0M型螺杆式启闭机,其负载满量程约为8 000 kg,螺杆螺距为16 mm,涡轮齿数为50,蜗杆齿数为1,电动机转速为940 r/min,开度满量程为4 m。启闭机在升降过程中,电动机每旋转一周传感器输出60个有效开度计数脉冲,每个脉冲对应的开度变化值约为0.005 mm,即开度检测分辨率可达0.005 mm,结合图6中电动机旋转方向不同时输出信号的波形,通过获取开度计数脉冲CW/CCW的数量可以计算启闭机实时开度。

图9 启闭机荷重检测试验台Fig.9 Experiment equipment for hoist load detection
启闭机荷重检测的分析以启闭机上升过程来说明,下降时其处理方法相同。试验前对荷重开度一体式传感器的输出进行预调,给启闭机施加最大额定负载约为8 000 kg,提升启闭机,将传感器的输出预调至4 V左右,保证AD转换有一定的余量。AD转换速度设定为60次/s,选取15位有效位,双极性工作方式,0~5 V的总力矩经变换得到的转换范围为-16 383~16 383。

图11 荷重检测第1阶段输出波动值示意图Fig.11 Wave value of output for the first stage of hoist load detection
依次给启闭机施加不同负载,选择0 kg、1 000 kg、2 000 kg、…、8 000 kg共9种负载,在整个上升期间,记录第1阶段未经灰色关联校正的不同负载对应的AD转换值及经灰色关联校正的AD转换校正值,并对AD转换校正值进行启闭机负载的LS-SVR及PLSR回归。
图10为启闭机实际负载为4 000 kg时第1阶段AD转换值及其校正输出值示意图,灰色关联校正系数α取0.5,权重系数λ1和λ2分别取0.95和0.05,维数n为10,上升初始阶段前20个采样值经软件低通滤波及平均处理后的集合平均值作为期望数据数列。

图10 启闭机负载为4 000 kg时AD转换值及其校正输出值Fig.10 AD conversion value and its correction when being loaded 4 000 kg for hoist
图11为第1阶段原始的AD输出值及经过灰色关联校正的AD转换校正值的波动示意图。
结合图10和图11,在荷重检测的第1阶段,未进行灰色关联校正的AD转换值波动性及随机性较大,在全荷重及全开度区间,其波动的峰峰值超过500,而经过灰色关联校正的AD转换值波动变小且趋于固定值约6 540,波动的峰峰值不超过60。根据灰色关联校正原理可知,参考数据数列元素为常值,经过校正的实际输出应能跟踪参考数据数列的变化趋势,即实际输出值以参考数据数列为中心的波动变小。由于启闭机的实际固定负载引起的力矩理论上不变,经过校正后的实际输出值偏离参考数据数列的波动越小,通过总力矩回归实际载荷的回归精度就越高。
对校正后的AD转换值分别采用LS-SVR及PLSR进行启闭机实际负载回归,并在第2阶段进一步采用灰色关联校正对回归模型预测值进行校正。给启闭机分别施加4 500 kg和7 500 kg的实际载荷,得到0~4 000 mm范围内的测量数据,第2阶段的灰色关联校正系数和权重等参数和第1阶段取值相同,记录每500 mm开度区间内检测系统的荷重检测输出最大偏差值,得到数据见表1。
图12为启闭机实际负载分别为4 500 kg及7 500 kg时采用灰色关联校正的启闭机荷重回归偏差曲线,图13为采用灰色关联校正的启闭机全量程荷重检测偏差分布图,其中图12及图13为选取成分数为5及4个开度等份区间得到的PLSR结合灰色关联校正的启闭机负载回归偏差。

表1 采用灰色关联校正的启闭机荷重检测偏差Tab.1 Deviations of hoist load detection with grey correlation correction kg
由图12和图13可知,在荷重检测的第2阶段,以启闭机荷重满量程为8 000 kg计算,结合灰色关联校正,当采用LS-SVR进行启闭机负载回归时,其满量程称量误差小于±0.6%,当采用PLSR回归时,其满量程称量误差小于±1%,2种回归方法都得到了较好的精度。当采用PLSR回归时,可通过适当增加等份区间数提高其回归精度,但计算量也相应增加。
在荷重检测的第2阶段,仍需采用灰色关联校正环节对启闭机的负载预测输出进行校正,否则其输出的波动值及随机性仍较大,造成在全开度区间内启闭机荷重检测的误差变大。如图14所示,在第2阶段,当未采用灰色关联校正环节时,全量程范围内,LS-SVR启闭机负载回归误差约±2.5%,PLSR启闭机回归误差约±3%。

图12 结合灰色关联校正的称量误差曲线Fig.12 Error curves of hoist load regression combined grey correlation correction with regression

图13 采用灰色关联校正的启闭机全量程荷重检测偏差Fig.13 Error distributions for whole range hoist load detection with grey correlation correction

图14 未采用灰色关联校正的启闭机全量程荷重检测偏差Fig.14 Error distributions for whole range hoist load detection without grey correlation correction
启闭机荷重检测的精度一直是启闭机应用过程中较难解决的问题,通过以上所述,由于荷重一体式传感器的总力矩输出信号中既包括启闭机实际负载引起的力矩,也包括了其他因素引起的附加力矩,而附加力矩在启闭机的全开度区间波动性及随机性较大,通过灰色关联校正环节可以有效抑制总力矩中的波动及随机变化部分,并将灰色关联校正与回归分析相结合,可以有效提高启闭机荷重检测的精度。
采用荷重开度一体式传感器对启闭机进行荷重开度信息获取,同时也充当了联轴器的作用,改善了现有检测装置维护安装困难的状况。由于一体式传感器与电动机的动力输出轴直接连接,在启闭机升降过程中,开度计数脉冲数大大增加,有效地提高了开度分辨率。
5 结论
(1)针对电动机驱动的启闭机应用场合,采用荷重开度一体式传感器实现对开度及荷重信号的获取,该传感器同时可起到联轴器的作用,方便于安装及维护,并改变了现有螺杆式启闭机荷重检测难以实现的状况。
(2)通过旋转变压器耦合和光电耦合方式,实现了荷重开度一体式传感器内部旋转电路的供电、总力矩及开度计数脉冲等电信号的非接触传输。
(3)采用分2个阶段基于灰色关联校正及负载回归分析的启闭机荷重检测方法,利用灰色关联校正环节降低和抑制总力矩信号中的波动及随机变化成分,在此基础上,结合LS-SVR及PLSR实现了启闭机实际负载的回归。
(4)通过2个阶段的灰色关联校正及回归处理,在满量程范围内,LS-SVR负载回归误差在±0.6%范围内,PLSR回归误差在±1%范围内。
(5)由于荷重开度一体式传感器与电动机的动力输出轴直接连接,在启闭机升降过程中,开度计数脉冲CW/CCS的数量大大增加,有效地提高了开度检测分辨率。
1 倪世江,倪帅,唐丽娜. 数字化螺杆式启闭机的研究与应用[J].中国农村水利水电,2012(2): 100-102. NI Shijiang, NI Shuai, TANG Li’na. The engineering research and application of the digital screw refrigerating machine[J].China Rural Water and Hydropower,2012(2):100-102.(in Chinese)
2 王建肠,徐小群. 闸门启闭机智能型载荷监控仪的设计与应用[J].自动化仪表, 2001, 22(3): 24-35. WANG Jianchang, XU Xiaoqun. The design and application of the intelligent load monitor for the start/stop machine of sluice gate[J]. Process Automation Instrumentation, 2001, 22(3): 24-35. (in Chinese)
3 吴韵侠,胡修池,高卫红. 引黄涵闸螺杆式启闭机的维护技术研究与应用[J].水利水电技术,2011, 42(2): 74-85. WU Yunxia,HU Xiuchi,GAO Weihong. Study and application of maintenance technology for screw gate hoist of Yellow River diversion sluice gate[J].Water Resources and Hydropower Engineering, 2011, 42(2):74-85.(in Chinese)
4 童光明,吴超凡. 双吊点螺杆启闭机在农田水利工程中的应用[J].湖南农业大学学报, 2000, 26(3): 228-229. TONG Guangming, WU Chaofan. Application of double-hook screw-crane in fields and water resources engineering[J]. Journal of Hunan Agricultural University, 2000, 26(3): 228-229. (in Chinese)
5 查六一,邵建龙,周玉岩,等.基于S7-200PLC的闸门卷扬启闭机的控制系统设计[J].水电能源科学,2010,28(3):127-130. ZHA Liuyi, SHAO Jianlong, ZHOU Yuyan, et al. Design of intelligent control system of cable gate hoist of sluice based on S7-200PLC[J]. Water Resource and Power,2010,28(3):127-130.(in Chinese)
6 丁问司,张旭,范亚军.细长型液压启闭机液压缸筒活塞杆挠度的计算分析[J].华南理工大学学报:自然科学版,2014,42(1):17-21. DING Wensi, ZHANG Xu, FAN Yajun. Calculation and analysis of deflection on piston rod of slim hydraulic hoist cylinder[J]. Journal of South China University of Technology: Natural Science Edition, 2014, 42(1):17-21.(in Chinese)
7 刘鸿文. 材料力学[M]. 5版.北京:高等教育出版社,2011.
8 崔骥,李怀琼,陈钱. 光栅莫尔条纹的细分与辩向新技术[J].光学技术, 2000, 26(4): 294-296. CUI Ji, LI Huaiqiong, CHEN Qian. New digital subdividing and rester-sensing technique for moire fringes of grating[J]. Optical Technique, 2000, 26(4): 294-296. (in Chinese)
9 刘春景,唐敦兵,何华,等. 基于灰色关联和主成分分析的车削加工多目标优化[J/OL].农业机械学报, 2013, 44(4): 293-298. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130450&flag=1. DOI:10.6041/j.issn.1000-1298.2013.04.050. LIU Chunjing, TANG Dunbing, HE Hua, et al. Multi-objective optimization of turning based on grey relational and principal component analysis[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 293-298. (in Chinese)
10 WANG Z X. Correlation analysis of sequences with interval grey numbers based on the kernel and greyness degree[J]. Kybernetes, 2013, 42(2):309-317.
11 ZHANG X R, ZHANG Q L. Study on one new grey similarity correlation degree model and its applications[J]. Journal of Chemical and Pharmaceutical Research, 2014,6(6): 1406-1411.
12 朱坚民,雷静桃,黄之文,等.基于灰色关联补偿控制的气动位置伺服控制系统[J].机械工程学报,2012, 48(20):159-166. ZHU Jianmin, LEI Jingtao, HUANG Zhiwen, et al. Pneumatic position servo control system based on grey relational compensation control[J]. Journal of Mechanical Engineering, 2012,48(20):159-166. (in Chinese)
13 SUYKENS JAK, VANDEWALLE J. Least squares support vector machine classifiers[J].Neural Processing Letters, 1999, 9(3): 293-300.
14 张闻宇,丁幼春,王雪玲,等.基于SVR逆向模型的拖拉机导航纯追踪控制方法[J/OL].农业机械学报, 2016,47(1):29-36.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160105&flag=1.DOI:10.6041/j.issn.1000-1298.2016.01.005. ZHANG Wenyu, DING Youchun, WANG Xueling, et al. Pure pursuit control method based on SVR inverse-model for tractor navigation[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1):29-36. (in Chinese)
15 赵进辉,袁海超,刘木华,等.鸭肉中金霉素残留量LSSVR-同步荧光法测定[J/OL].农业机械学报, 2012,43(12):136-140. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20121225&flag=1.DOI:10.6041/j.issn.1000-1298.2012.12.025. ZHAO Jinhui, YUAN Haichao, LIU Muhua, et al. Determination of aureomycin content in duck meat using LSSVR and synchronous fluorescence spectroscopy[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2012,43(12):136-140. (in Chinese)
16 黄丽,孙玉坤,嵇小辅,等.基于CPSO与LS-SVM融合的发酵过程软测量建模[J].仪器仪表学报, 2011,32(9):2066-2070. HUANG Li, SUN Yukun, JI Xiaofu, et al. Soft sensor modeling of fermentation process based on the combination of CPSO and LSSVM[J]. Chinese Journal of Scientific Instrument,2011,32(9):2066-2070. (in Chinese)
17 SCHWARTZ W R, KEMBHAVIA, HARWOOD D, et al. Human detection using partial least squares analysis[C]∥IEEE 12th International Conference on Computer Vision,2009:24-31.
18 BARKER M, RAYENS W. Partial least squares for discrimination[J].Journal of Chemometrics,2003,17(3):166-173.
19 CARRASCAL L, GALVAN I, GORDO O. Partial least squares regression as an alternative to current regression methods use in ecology[J]. Oikos,2009,118(5):681-690.
20 何力,曲仕茹. 基于PLS-VIP特征降维的车辆检测[J].中国公路学报,2014,27(4): 98-105. HE Li, QU Shiru. Dimensionality reduction based on PLS-VIP for vehicle detection[J].China Journal of Highway and Transport, 2014,27(4): 98-105. (in Chinese)
21 何东建,陈煦.土壤有机质含量田间实时测定方法[J/OL].农业机械学报,2015,46(1):127-132. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150119&flag=1.DOI:10.6041/j.issn.1000-1298.2015.01.019. HE Dongjian, CHEN Xu. Real-time measurement of soil organic matter content in field[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(1): 127-132. (in Chinese)
22 常英杰,陆宪忠,王世龙,等.基于偏最小二乘法的发动机排气分析仪线性化研究[J].机械工程学报,2011,47(10):76-81. CHANG Yingjie, LU Xianzhong, WANG Shilong, et al. Study on the linearization of analyzer for engine exhaust based on partial least squares[J]. Journal of Mechanical Engineering, 2011,47(10):76-81. (in Chinese)
Load and Opening Detection System for Hoist Driven by Motor
QIAO Aimin1HE Boxia2LUO Shaoxuan1HUANG Yinghui1WANG Yanchun1
(1.SchoolofElectronicandElectricalEngineering,BengbuUniversity,Bengbu233000,China2.SchoolofMechanicalEngineering,NanjingUniversityofScienceandTechnology,Nanjing210094,China)
Installed between the motor’s shaft and the hoist power input one, an integrate sensor could output not only the total torque signal related to the change for hoist’s load but also 60 pulses per revolution for motor’s shaft. The hoist’s opening could be calculated by associating the number of those pulses with some parameters of the hoist. In the integrate sensor, those rotary circuits could be powered from the rotary secondary of transformer whose primary was fixed with the sensor’s metal shell, which was used as a part of magnetic core of the transformer. By using the photoelectric coupling method, non-contact transmission for the sensor’s signals about the total torque and the opening was realized. Besides the torque caused by constant load, the total one also included some other torques shown as fluctuation and unsteadiness because of those factors, such as friction existing in the hoist’s mechanical structure. In order to get the actual load from the total torque signal, two phases were selected for hoist’s load detection. Firstly, the analog-to-digital converter (ADC) output value corresponding to the total torque was corrected though gray correlation analysis, and the corrected ADC value whose fluctuation and unsteadiness had been greatly reduced was selected to be as the result of the first phase. In the second phase, by using the result of the first phase as input variable, the hoist’s load predicted model was founded according to the least square support vector regression (LS-SVR) or partial least square regression (PLSR). Taking the first predicted value as the expected data sequence and implementing the correction based on the gray correlation analysis again, the hoist actual load was finally attained. Experiment result showed that the error of the result of load detection was less than ±0.6% for LS-SVR and below±1% for PLSR model cooperated with the correction based on the gray correlation analysis. Meanwhile, since the integrate sensor was directly installed between the motor shaft and the hoist one, the number of pulses would be greatly increased during the hoist’s moving up and down which could well improve the opening detection resolution. The resolution of the hoist opening detection was far below 1 mm.
hoist; load and opening; detection system; motor drive
10.6041/j.issn.1000-1298.2017.01.051
2016-11-08
2016-11-29
国家自然科学基金项目(51175267、51575281)和安徽省高等学校省级自然科学重点基金项目(KJ20160A452、KJ2013Z193)
乔爱民(1970—),男,副教授,主要从事嵌入式系统、机电系统设计、无线传感器网络研究,E-mail: aimin_qiao@163.com
TH823; TP212
A
1000-1298(2017)01-0386-11
猜你喜欢
湖南水利水电(2021年6期)2022-01-18
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
国学(2020年1期)2020-06-29
发电技术(2020年3期)2020-06-29
戏剧之家(2018年21期)2018-10-19
中国医学影像学杂志(2018年9期)2018-10-17
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
中国水利(2015年4期)2015-02-28
