
乐高NXT与威尼尔传感器优化整合的实践研究
2017-02-10 20:21韩唯伟倪敏张鹏
教育教学论坛 2017年3期
关键词:教学实验
韩唯伟+倪敏+张鹏

摘要:本文的目的是利用乐高机器人NXT与美国威尼尔公司生产的各种传感器的整合,来展示机器人在学校实验教学里的强大功能,让更多的学生真正地了解机器人工作的原理,认识乐高NXT和威尼尔传感器。并借助乐高NXT和威尼尔传感器来探索、研究、开发更多的智能机器人。
关键词:乐高NXT;威尼尔传感器;教学实验
中图分类号:G642.0 文献标志码:A 文章编号:1674-9324(2017)03-0056-03
智能机器人的形成与传感器的应用是分不开的,乐高机器人NXT搭配的是威尼尔传感器。威尼尔公司研发和生产的大量传感器已经在很多学校的实验教学中得以使用。例如:使用距离传感器可以轻而易举完成单摆实验中摆球的位移、速度、动量、动能等物理量的测量,并且可以把每个物理量的图像清晰直观地描绘出来。有了威尼尔传感器的加入之后,乐高NXT机器人不仅可以满足学校的教学所需,还增加了很多新功能,并且这些功能趋于生活化,处理功能强大、可以启发学生无限创意的乐高机器人NXT结合数据采集精确、种类丰富的威尼尔传感器在下面的实验里将会展现完成各种实验的非凡效果。
一、乐高NXT、威尼尔传感器及应用软件ROBOLAB的简介
1.乐高NXT机器人。乐高NXT机器人的心脏系统是一个32位的微型处理器,可以经由PC或Mac操作程序。[1]这是所有器件中最不可或缺的角色,因为其他所有的附件都是为它服务和充实的。乐高积木类型很多,有搭积木建结构必须的梁、插销、轴、链条、齿轮、涡轮等。有了这些积木你可以发挥想象和创意搭建任意你可以想的出来的结构,这对于我们后面的设计实验不无裨益。如果说乐高积木是乐高机器人的身体的话,那么传感器就是机器人的各种“感受器官”和“执行器官”了。在乐高机器人的配件里有触动传感器、声音传感器、光强传感器、超声波传感器、角度传感器(同时也是机器人转动马达)等。
2.应用软件ROBOLAB。可以用作编写乐高机器人程序的软件有很多种,ROBOLAB就是其中之一。这是由乐高集团、美国塔辅茨大学和美国国家仪器公司以LABVIEW为基础,对其编程环境做了一些改变,转为教学应用开发的机器人和数据采集编程软件。[2]我们选择可以参与教学开发和数据采集的ROBOLAB2.9软件。就ROBOLAB软件使用的效果来看,是一个比较简便、直观、易操作的G语言软件,在编程时只需要把程序图标放在图标窗口,然后按照逻辑顺序用线条连起来,这样就完成了编程。
3.威尼尔传感器。作为乐高NXT配件的以上五种传感器显然不能满足教学中实验中要测量的物理量种类的要求。所以我们还需要其他功能的传感器,例如:力传感器、位移传感器、温度传感器、磁传感器、加速度传感器等。威尼尔传感器是专门为科学教育而研发的产品,它适用于高中物理、高中化学、高中生命科学、地球科学、水质分析、小学及初中科学、课堂探究及野外实验。威尼尔提供了超过55种不同类型特点的传感器,[3]足够我们武装智能乐高NXT机器人并在教学基础课程、研究型、探究性学习中甚至生活中应用了。
二、乐高机器人NXT与威尼尔传感器整合的实验案例
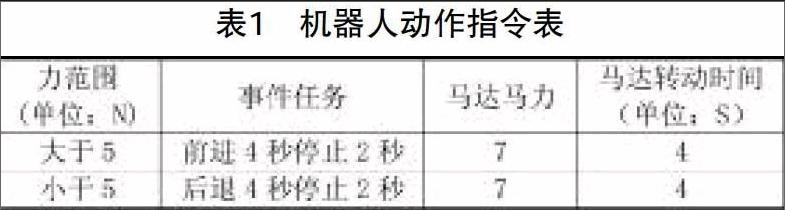
1.双范围力传感器控制机器人行走。在物理教学实验中,力传感器扮演着十分重要的角色,在众多的物理实验里,例如:牛顿第三定律,简谐振动,摩擦力的测量等,力传感器被广泛的应用。设计一个用力传感器来控制机器人的前进与后退,甚至转弯。这样一来,就实现了不同的物理量之间的转换和显示,把力的大小转化为机器人行驶的方向(如下页图1)。
我们要求机器人能够做到以下几点:①机器人能够实时显示由力传感器采集的力的大小;②机器人在力大于5N的情况下,向前进4秒,然后停止2秒钟,在力小于5N的情况下,后退4秒,然后停止2秒;③以上的程序一直被执行。
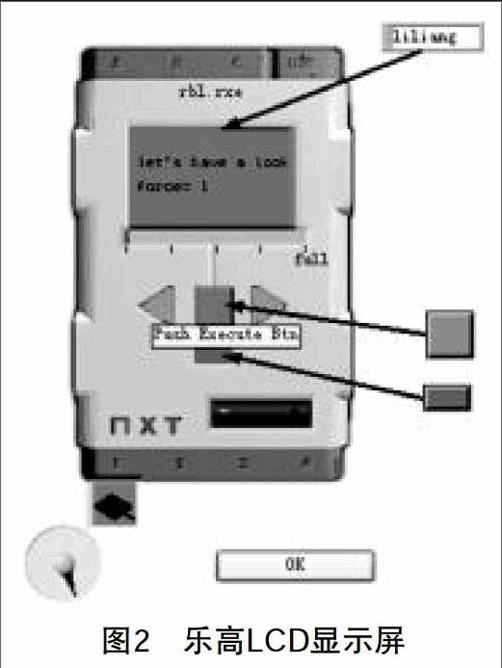
为了实现上述的功能,我们要用到以下威尼尔传感器模块。①威尼尔传感器容器。它的功能是把传感器采集的数据转化为整型放入容器里。NXT书写框。在里面填写程序注释,显示在NXT的LCD屏幕上。②字符显示框。为采集器采集的物理量命名。在LCD屏幕上显示采集的物理数值。③威尼尔分支结构。采集的数据将与人为设定的数值进行比较,做出判断后执行相应的程序。[4]在ROBOLAB2.9.4的下面板中,编写逻辑程序赋予机器人上述功能。在程序中使用跳转循环使得程序不断的运行直至按下停止按钮令其停止。程序编写完毕,通过USB接线把程序下载到NXT中。运行程序,用力拉拽双范围力传感器的金属钩,改变拉力的大小,此时NXT的LCD的屏幕上就显示出拉力的大小,同时注释的内容也会显示在屏幕上(如图2)。机器人开始行走,随着拉力改变,改变相应的行走方向。
通过与乐高NXT的整合,双范围力传感器不仅完成了测量任务,还把采集的力的大小转化成了机器人的行走方向,实现了力大小向行为的转化。
2.智能浇花机器人。使用威尼尔土壤湿度传感器与乐高NXT整合,我们可以研发出来一台智能浇花机器人。我们开发的这台智能浇花机器人不仅具备了定时浇花的功能,而且还具备了根据土壤湿度需要进行自动浇花的优点。一般的浇花是通过向植物叶片喷水的方式进行浇灌,这台自动浇花机器人不仅可以做到这点,它还可以通过植物根部进行浇灌。
这台机器人的原理是:通过马达的不断转动,带动打气筒不断的打气,使得汽缸瓶里面的气压持续的上升,汽缸通过一根橡皮管与密封的装有水的瓶子连通,于是会引起密封瓶里面的气压上升,从密封瓶子里引出一根橡皮管,水就会被挤压出来,这样就可以给植物浇灌了。为了做到同时给植物的叶片和根部同时浇灌,可以同时从密闭的瓶子里引出两根橡皮管。图3就是搭建的自动浇花机器人装置。
为智能浇花系统设计程序。乐高NXT与威尼尔土壤湿度传感器整合后能够根据土壤的湿度判断是否该给土壤浇灌水了,同时要实时的把土壤的湿度测量并显示在乐高NXT上。在这里要用到传感器容器模块,选择土壤湿度容器,把土壤湿度传感器采集的数据放入容器中,然后通过NXT字符显示模块把容器里面的整数型值显示在LCD屏幕上,有了具体的土壤湿度值后,根据植物生长所需水分的需要设定一个土壤湿度比较值,当传感器测量的土壤湿度值小于植物生长需要的土壤湿度时,执行浇灌程序。针对本实验装置,令马达转动,即可实现浇水,同时音乐响起以示浇灌开始。6秒钟后,以上的动作停止,然后等待4秒钟,让刚刚浇灌的水分渗入土壤,改变土壤的湿度状况。添加跳转模块,跳转到程序的第一步骤,重复以上的步骤,如果测量到土壤的湿度已经达到设定值时,马达不转动,然后继续跳转程序。
三、案例分析与评价
双范围力传感器控制乐高机器人可以作为物理实验的一个范例,这个范例可以启发学生创造更多有趣和实用的传感器机器人。简单的乐高NXT行走结构与双范围力传感器,就构成了一个小型的机器人。执行程序、用来控制机器人的大脑就是乐高NXT,它是机器人运转的控制中心。威尼尔双范围力传感器就是机器人的“感觉器官”。通过传感器采集外部的物理信息,再把信息反馈到控制中心NXT,接着机器人就根据物理信息执行任务。如此看来,这个机器人的构造和运作过程简单易懂。作为基础整合案例,实验中采用威尼尔双范围力传感器当作机器人的“感觉器官”。一个智能机器人不仅可以感受外界施加的力大小,还可以感受其他的物理因素。这就需要给乐高NXT机器人添加其他类型的传感器了。给机器人加上了“温度感觉器官”,就使得机器人对温度有了敏感的感受。生活中有很多的物理因素是人们每天都要接触的,为了让乐高NXT机器人还可以感受更多的物理因素,只要把其他类型的威尼尔传感器与乐高NXT相整合,就可以实现。在“智能浇花机器人”试验中把威尼尔土壤湿度传感器与乐高整合,就诞生了“智能浇花机器人”,就使得机器人对土壤湿度有了反馈,从而实现土壤湿度的变化影响机器人的行为;同样,还可以使用加速度传感器与乐高NXT结合,测量物体的加速度,制成“加速度报警机器人”,也可以实现加速度传感器控制机器人行为等。乐高NXT机器人与威尼尔传感器整合后所具备的反馈机制,成为了不同物理量之间进行任务转化的桥梁,因此对于教学探究是很有益处的!通过将乐高NXT与威尼尔传感器的整合在物理、化学、生物学科中的实验应用,我们可以发现二者的整合带来的优越性:[5](1)清晰地展示了构造智能机器人的过程。可以说在各个学科实验里,每个智能机器人的诞生都经历了三个步骤——提出机器人功能假设;搭建机器人结构,选择所需传感器;为智能机器人编写功能程序。学生可以充分利用乐高提供的搭建平台,发挥自己的想象力和构造力,设计创造出种类繁多,造型各异的机器人。(2)开放的多功能实验平台。乐高机器人NXT与威尼尔传感器的整合不仅满足了基本的数据测量和采集功能,还实现了不同的物理量之间的任务转换。在“双范围力传感器控制机器人行走”实验中,机器人把采集到的力的大小转化为马达转动的方向,进而转化为可视化的机器人行走方向;在“智能浇花机器人”实验中,把土壤湿度转化为马达转动的时间,实现了机器人在一定条件下智能执行任务的愿望。因此,二者的整合使得实验平台更加宽广,功能更加强大。(3)促进探究实验发展。由于威尼尔传感器的种类丰富,例如:紫外线传感器、水流速率传感器、光传感器、二氧化碳传感器、氧气传感器、相对湿度传感器等,都可以充当探究实验的“主力军”。威尼尔提供的教学中极少见的传感器更是为学生拓展课外知识,探究生活提供了强有力的“武器”。这些传感器的测量对象都是生活中耳熟能详的,使用威尼尔传感器能够极大的激发学生对探究实验的兴趣,从而促进探究实验的发展。(4)锻炼了学生的逻辑思维。在实验案例里面,采用了乐高ROBOLAB图形化编程软件进行程序编写。图形化的ROBOLAB编程软件适合各个年龄段的学生使用,程序的编写方式类似于做逻辑表达,所以在基于ROBOLAB编程环境进行程序编写,需要清醒的头脑,清晰的逻辑。程序编写完毕后通过乐高USB数据传输线传送至机器人记忆体中即可检验逻辑程序编写情况。如果程序编写失误,通过反复修改程序,传送至机器人多次验证,给了学生锻炼逻辑思维的好机会。
本文的实验案例展示的只是乐高机器人NXT与威尼尔整合产生案例的冰山一角,介绍了如何操作乐高NXT与威尼尔整合的基本原理和方法。更多实用、有趣和充满挑战的实验还有待科学和教育工作者去探索、研发。乐高机器人可同时支持连接4个乐高NXT传感器适配器,因此还可以研发出有多个威尼尔传感器接入乐高机器人的大型化和功能复杂化的机器人。诸如此类的实验机器人通过乐高NXT与威尼尔的整合,它们在学校实验教学,以及生活中一定能够发挥重要的作用,为更多的学生提供发明创造的平台。
参考文献:
[1]芙蓉,王向丰.乐高TNT机器人的编程软件的教学和实践[J].中国校外教育,2014,(9):164.
[2]王磊.精通LabVIEW8.0[M].北京:电子工业出版社,2008.
[3]刘洋,吴广国.利用Vernier传感器演示电路中的自感现象[J].实验教学与仪器,2015,(3):29.
[4]张明.乐高机器人转弯问题的探讨[J].中国现代教育装备,2007,(5):104.
[5]曹海华.基于乐高的机器人活动设计与实践[J].机器人教育,2013,(4):62.
The Reash of Optimization and Integration between Lego NXT and Neil Sensor
HAN Wei-wei,NI Min,ZHANG Peng
(College of Mathematics and Physics,Shanghai Normal University,Shanghai 200234,China)
Abstract:The purpose of this paper is to show the strong function of the robots that made of LEGO NXT and Vernier sensor used in the experiment at school.Then we hope more and more students to master the theory of making robot,know LEGO NXT and Vernier sensor .More people will take part in exploring and researching robots.
Key words:LEGO NXT;vernier sensor;experiment
猜你喜欢
少儿美术(2021年2期)2021-04-26
海外华文教育(2017年10期)2018-01-19
考试周刊(2016年99期)2016-12-26
中国教育技术装备(2015年21期)2015-03-11
浙江科技学院学报(2014年2期)2014-02-28
江西理工大学学报(2014年4期)2014-02-28
西华大学学报(哲学社会科学版)(2014年5期)2014-02-27
物理与工程(2013年3期)2013-03-11
