
新型深水复合式锚泊线动力特性分析
2017-02-17 09:36朱忠显尹勇神和龙
哈尔滨工程大学学报 2017年1期
朱忠显,尹勇,神和龙
(大连海事大学 航海动态仿真和控制实验室,辽宁 大连 116026)
新型深水复合式锚泊线动力特性分析
朱忠显,尹勇,神和龙
(大连海事大学 航海动态仿真和控制实验室,辽宁 大连 116026)
通过对工作水深为1 500 m的新型复合式锚泊线进行动刚度和动张力计算,并与静刚度下计算结果比较,说明了在合成纤维缆的数值计算中考虑其动刚度特性的必要性;传统动刚度计算中将整条纤维缆作为直线考虑,假定纤维缆上应力和应变处处相同,不考虑纤维缆自身重量,且忽略流体动力的作用,这些假设和忽略降低了计算精度,且无法适用于不均匀缆和复合式锚泊线的计算;基于集中质量法建立了复合锚泊线的动力学模型,提出基于统计的方法计算合成纤维缆各缆段的平均张力,采用分段动刚度的方法通过迭代求解各缆段上的动刚度和动张力,并考虑了自身重量、流体动力和海流的影响。
复合式锚泊系统;集中质量法;动力学模型;动刚度特性;合成纤维缆
随着科学技术的发展和人类对油气资源的需求不断增加,海洋油气资源的开发逐渐向深水延伸,海洋浮式结构物的定位技术面临巨大的挑战。传统的悬链式锚泊系统通常采用三段浮容重、刚度和长度均不相同的钢链和钢缆组合而成的复合式锚泊线,利用钢链和钢缆的自身重量为上部浮体提供恢复力。但随着海洋平台工作水深的增加,浮式结构物需要更长的锚泊线系泊,从而导致更大的系泊半径、较低的回复效率、更大的缆索自重和较小的平台有效承载能力等缺陷。锚泊系统的造价更高,安装难度也越来越大,这限制了传统的悬链式锚泊系统在深水和超深水中的应用[1]。新型人工合成纤维缆,因其自身重量更轻、成本更低,且具有较高的断裂强度,能够大大减少锚泊系统的自身重量、提升锚泊系统的力学性能,在深水和超深水应用中具有明显的优势而倍受关注。目前,合成纤维缆已被广泛应用于深水平台的锚泊系统中,用于代替钢链-钢缆-钢链复合式锚泊线中的钢缆,并被证明具有良好的经济性能[2]。
目前,无论在理论、实验和数值分析方面,针对这种新型深水复合式锚泊系统的研究都处于起步阶段。
1 合成纤维缆动刚度特性及求解方法
复合式锚泊线中的钢缆和钢链在动力学计算中可假定为线弹性材料,而合成纤维缆却具有复杂的材料非线性特性。纤维缆材料的非线性表现为弹性模量的非定值,它随着系缆的平均张力、张力变化幅值和变化周期等因素的变化而变化,这使得准确把握纤维缆在复杂海洋环境条件下的动力响应非常困难。随着合成纤维缆在海洋工程锚泊系统中的应用越来越广泛,对纤维缆材料的研究也越来越受到重视,人们开始尝试将系缆的材料特性应用到锚泊线的动力学分析中。
Del Vacchio[3]对聚酯纤维缆进行了模型实验,指出平均张力、张力幅值和载荷周期是影响弹性模量的主要因素,并给出了常温、循环载荷作用下纤维缆的弹性模量经验公式。Bosman等[4]以Del Vacchio的经验公式为基础,通过实验研究发现平均载荷是影响动刚度的主要因素。Casey[5-6]对聚酯纤维缆进行了大量的模型实验,给出了多组经验公式参数。Kim[7]采用迭代法对聚酯纤维缆的动刚度进行求解,并将动刚度特性引入到系缆的动力响应分析中。Tahar等[8]在柔性杆理论和有限元法的基础上,引入系缆的动刚度特性对聚酯纤维系缆进行了分析。Francois等[9]通过模型试验指出在随机载荷作用下,平均张力是影响动刚度值的最主要因素。刘海笑和黄泽伟等[10-11]、张火明等[12]在对绷紧式系泊系统的数值分析中考虑了纤维系缆的动刚度特性,改进了系缆动刚度和动张力的计算方法,并以同一座工作于1 500 m水深的Spar平台为例进行了计算。
1.1 合成纤维系缆的动刚度特性
对于复合式锚泊线中的合成纤维缆部分,其响应和性能主要取决于系缆的轴向刚度(E×A)特性(其中E为系缆的弹性模量,A为横截面积),轴向刚度的准确表达是精确计算平台运动及系缆张力响应的基础。通常引入一个经验公式来描述合成纤维缆在循环载荷作用下的动刚度特性。
(1)
式中:Lm为平均张力占最小破断强度(MBL)的百分比;La为动态张力幅值占MBL的百分比;系数α''、β''和γ''是与合成纤维缆构造相关的参数。
1.2 传统动刚度求解
纤维缆动刚度的求解分两步进行:
1)求平均张力。用静刚度模型k0=(E×A)0/MBL(k0是由制造商提供的定值,一般在较低的单向载荷下测得,与缆绳自身特性相关)计算平均张力,得到Lm。若浮体在平衡位置左右做简谐振动,取系缆的初始预张力即为平均张力。
2)迭代计算动刚度。由静刚度模型可以计算出系缆平均张力,也可求得张力变化幅值La,但该La与真实动刚度情况下的La相差较大,须通过迭代的方法求解,将Lm和La代入式(1)中,计算得到一个新的动刚度值k1。利用k1计算得到的新的系缆张力及La,再将La代入式(1),求解动刚度值k2…,如此反复迭代,直到相邻两次的动刚度计算结果ki-ki-1小于设定的容差值,认为计算收敛,ki即为所求得的动刚度值。
1.3 改进的动刚度求解方法
传统动刚度计算[10-12]中将整根纤维系缆作为一条直线考虑,假定纤维缆上的应力和应变处处相同;认为合成纤维缆的密度与海水密度十分接近,因而不考虑缆的自重,且系缆所受的流体动力相对于轴向张力较小,亦忽略不计;计算中通常假设上部浮体在平衡位置附近做简谐振动,将系缆的初始预张力作为平均张力。传统动刚度求解方法虽然大大简化了计算,但也损失了计算精度。
首先,尽管合成纤维缆自身重量较轻,但深水系泊中的缆长通常较长,缆索自重产生的总体作用仍然较大。以表1中的聚酯纤维缆为例,其总浮重可达0.085 26×2 000.0=170.52 kN,为预张力的(2 308kN)的7.39%,忽略这部分的影响显然是不合适的;其次,纤维缆在外界激励下的形状并不是一条直线,系缆上的张力同一时刻也并非处处相等,下部点的响应比其上部点要滞后;最后,传统方法无法考察流体动力对缆索的动力响应。
另外,传统动刚度计算方法仅适用于由合成纤维缆组成的单成份锚泊线的计算,对于形式为锚链-纤维缆-锚链的复合式锚泊线,传统动刚度计算方法不再适用。为精确计算复合式锚泊线上的动张力,应将合成纤维缆的动刚度特性引入到锚泊线的动力学分析中。
本文采用分段动刚度的方法,将合成纤维缆按与钢链相同的方法进行空间离散,建立纤维缆段的动力学模型,对每一缆段采用误差控制的迭代方法求解其动刚度和动张力;在动力学模型中充分考虑流体动力、自身重量和海流等因素的作用;基于统计的方法计算平均张力,即记录每一缆段在过去一段时间的动张力,取该记录的平均值作为平均张力,并将其用于下一时刻该缆段动刚度的计算;为减少迭代次数,以缆段上一时刻的动刚度值作为下一时刻迭代的初始值。
2 锚泊线动力学模型
锚泊系统的动力学建模方法有集中质量法、有限元法和有限差分法等。其中,集中质量法[13-14]因物理意义明确,算法简单易懂,具有广泛的适用性及扩展性而得到广泛应用。Chai等[15]将集中质量法进行了扩展,并将弯矩、扭矩、与海底的接触问题等加入到海洋缆索的计算模型中。王飞[16-18]和朱克强等[19-20]基于集中质量法建立了海洋缆索的动力学模型,同时考虑了弯矩、拖缆-海底接触等的响应,实现了缆索收放过程的模拟。
2.1 坐标系
锚泊系统的动力学模型应该建立在合适的坐标系下,根据需要建立如图1所示的惯性坐标系o-xyz和局部坐标系i-btn。惯性坐标系是空间固定的坐标系,所有的计算均转换到该坐标系下进行,其原点位于锚泊系统末端与锚的连接处,长度记为s=0。局部坐标系附在锚泊线上,t轴为微元的切线方向,指向长度s增加方向,n和b分别为法向和副法向;欧拉角(φ,θ)为微元段的姿态角。两个坐标系均为右手系,通过姿态角(φ,θ)进行关联。局部坐标系到惯性坐标系的转换矩阵为:
式中:[xyz]T=A[btn]T,矩阵A为单位正交矩阵,其逆矩阵为其转置矩阵。
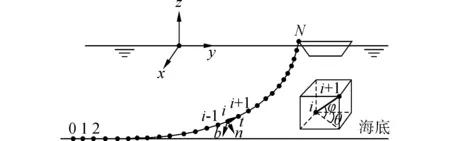
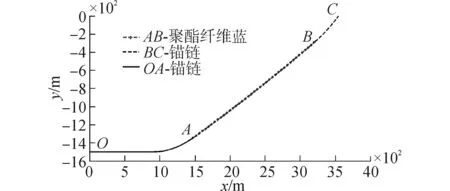
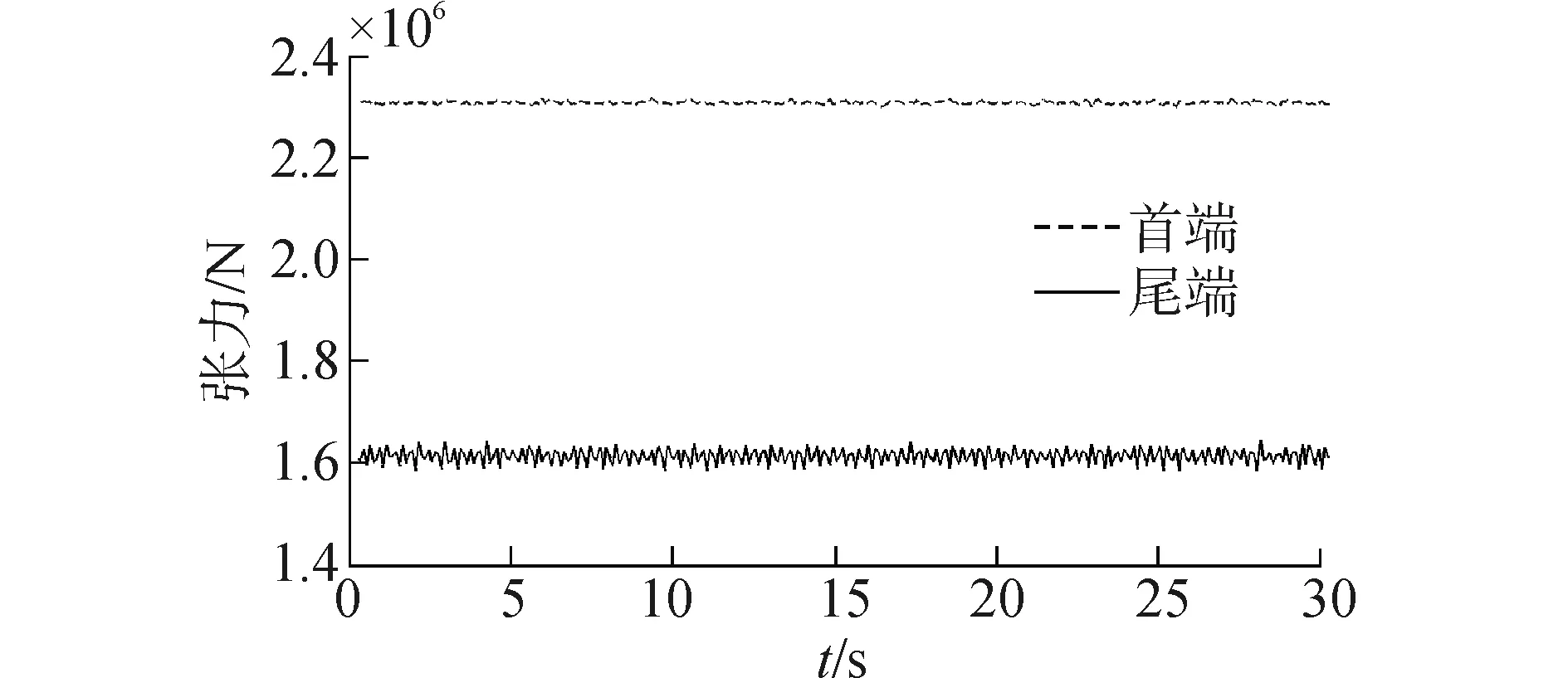
图1 锚泊系统坐标系Fig.1 Coordinate system of the mooring system
2.2 动力学模型
为建立锚泊系统的动力学模型,将锚泊线在空间上离散为一系列节点。锚泊线总长度为S,末端s=0为第i=0个节点,上端点处s=S,为第i=N个节点。任取一微元段ds进行受力分析并应用牛顿第二定律,得到第i个节点的控制方程:
(2)

2.2.1 质量矩阵
(3)
式中:惯性质量mi=(μi-1/2li-1/2+μi+1/2li+1/2)/2;附加质量:
P=

2.2.2 浮力和重力
(4)
2.2.3 流体动力
按Ablow[21]和Huang[22]的方法:
(5)
在局部坐标系下,节点的流体动力为

2.2.4 张力
张力由链或缆的材料特性和形变决定。合成纤维系缆应力-应变关系不是简单的线性关系,它受系缆构造形式、材料、载荷类型等影响。为将纤维缆的材料特性引入到锚泊线的动力分析中,采用误差控制的迭代算法求解微元的动刚度和动张力:
(6)
钢缆和钢链假定为线弹性材料,其本构关系采用虎克定律:
(7)
2.2.5 与海底的相互作用
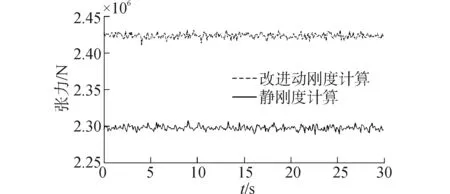
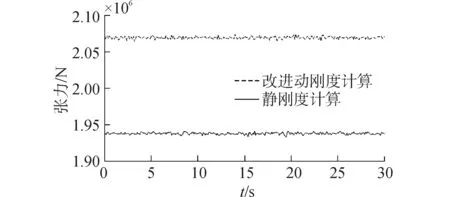
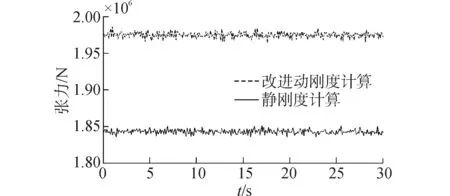
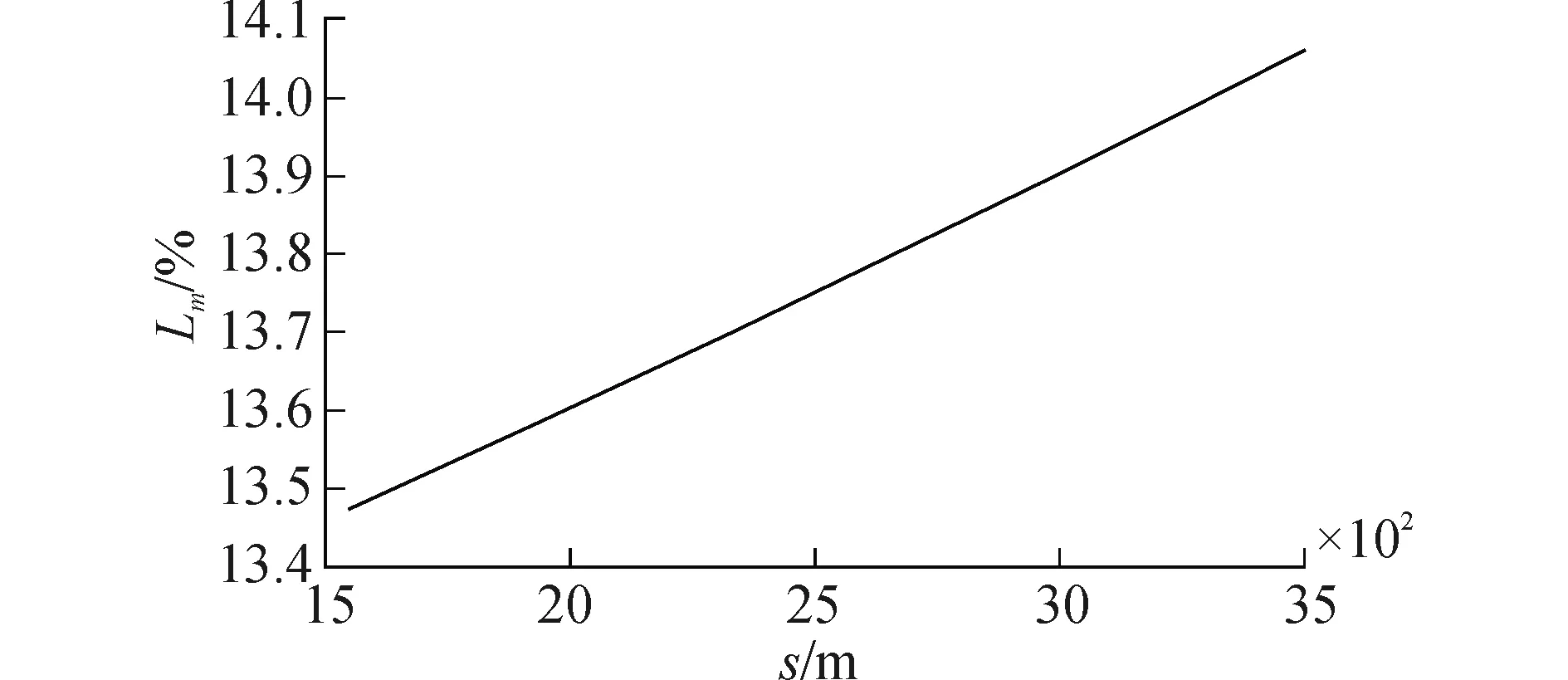
采用常洪波的方法[23],将海底土壤视为线性的弹性基础,用库仑定律描述摩擦力。节点i的垂向坐标为zi,该处海底坐标为zbi,当zi (8) 摩擦力的计算公式为: (9) 式中:k为海底的等效刚度系数,c为等效阻尼系数,n为海底的外法线方向,μ为锚泊线与海床面的摩擦系数,vti为与海底接触的节点的切向速度,设置临界速度vlim应尽可能小。 2.3 动力学模型数值解算 1) 边界条件。锚端边界条件设置为固定端;锚泊线顶端的位置和速度与平台的运动保持一致: (10) 式中:xs、ys、zs、us、vs、ws分别为锚泊线顶端的位置和速度,它们是时间的函数。 2) 初始条件。确定节点初始时刻位置和速度: 在对开关插座进行安装以前,可以向居住的业主进行意见上的征询,然后合理的进行着位置上布局,必须对开关插座在高度上进行着严格的把控,使每一个开关插座的位置都能保证是合理的。在一个房间中开关的插座在高度上的误差需要控制在合理的范围内,数值为15mm。在进行埋线的时候,一定要对施工过程中的要求进行严格的遵守,要将开关和插座进行并联。除此之外,还需要在安全强弱电线的时候进行区分,二者之间在距离上要控制在40mm左右,使电信号受到的影响得到有效的降低。 (11) 式中:等式右侧部分为给定的初始值。 3) 数值求解。联立控制方程(2),再加上初始条件,并由v=dx/dt,得到完整的偏微分方程组: (12) 对方程组采用四阶龙格-库塔法求解,由各节点在tn时刻运动状态即可得到tn+1=tn+Δt时刻的运动状态。 以一座工作水深为1 500 m的海洋平台为例进行计算,该平台锚泊系统采用复合式锚泊线。锚泊线参数如表1所示,顶端的初始预张力为2 308 kN,锚泊线结构如图2所示。聚酯纤维缆的材料特性参数α''=14.469,β''=0.211 3,γ''=0.269 7,准静刚度值k0=12.2[2]。 表1 系缆参数 将锚泊线按每段25.0 m离散为158段,时间步长取2 ms。将k0=12.2代入到动力学模型中的纤维缆段进行计算,复合式锚泊线在初始预张力作用下的构形如图2所示。由于聚酯纤维缆段重量较轻,其空间形状接近为一条直线。将锚泊线首端位置固定,可得到静刚度下锚泊线首尾两端的张力-时间历程如图3所示。 图2 复合锚泊线构形图Fig.2 Configuration of the hybrid mooring line 图3 锚泊线首尾两端动张力Fig.3 Tensions on the line's two ends 若采用改进的动刚度方法对锚泊线进行动力学计算,锚泊线首尾两端的张力-时间历程如图4和图5所示,锚泊线首尾两端的动张力比静刚度下计算结果分别大5.50%和7.12%;纤维缆段上下两端的动张力计算结果如图6和图7所示,比静刚度下的计算结果分别大6.76%和7.13%。 图8为基于统计的方法得到的纤维缆段上的平均张力,该值沿缆长的方向增加。图9为平均张力占最小破断强度(MBL)的百分比(Lm),该值介于13.47~14.06。在合成纤维缆的动力特性分析中,当Lm>10.0时就必须考虑纤维缆的动刚度特性。 图4 锚泊线首端动张力Fig.4 Tension on the line's towing end 图5 锚泊线尾端张力Fig.5 Tension on the line's lower end 图6 纤维缆上端动张力Fig.6 Tension on the fiber line's upper end 图7 纤维缆下端动张力Fig.7 Tension on the fiber line's lower end 图8 纤维缆段平均张力Fig.8 Mean loads on the fiber line 图9 纤维缆段平均张力占MBL的百分比(Lm)Fig.9 Mean loads as % of MBL along the fiber line 图10 纤维缆两端张力幅值占MBL的百分比(La)Fig.10 Tension amplitudes as % of MBL along the fiber line 图10为纤维缆两端的张力变化幅值占最小破断强度(MBL)的百分比(La),该值在0值附近振动。Lm和La决定了不同缆段上的动刚度计算结果。图11为纤维缆段两端的动刚度值,分别位于17.44和17.315附近,均比静刚度值k0=12.2大得多。 图11 纤维缆两端动刚度值Fig.11 Dynamics stiffness on the fiber line's two ends 假设平台沿x方向运动,锚泊线上端随平台主体发生位移,位移随着时间的变化历程为正弦函数为x(t)=x0sin(2πt/T)。x0取5.0m,T取10s。 图12和图13分别为施加激励后锚泊线两端动张力的计算结果及其与静刚度下计算结果的比较情况。锚泊线首端最大和最小张力分别比静刚度下大5.79%和7.91%,尾端最大和最小张力分别比静刚度下大12.34%和7.26%。 图12 锚泊线首端动张力Fig.12 Tension on the line's towing end 图13 锚泊线尾端动张力Fig.13 Tension on the line's lower end 图14 纤维缆首端动张力Fig.14 Tension on the fiber line's upper end 图14和图15分别为纤维缆两端动张力计算结果,纤维缆上端最大和最小张力分别比静刚度下大12.32%和4.74%,下端最大和最小张力分别比静刚度下大7.82%和6.70%。 图15 纤维缆尾端动张力Fig.15 Tension on the fiber line's lower end 图16和图17分别为纤维缆两端的平均张力和张力幅值占最小破断强度(MBL)的百分比,二者构成影响动刚度计算结果的主要因素。 图16 纤维缆段两端平均张力占MBL的百分比(Lm)Fig.16 Mean loads as % of MBL on the fiber line's two ends 图17 纤维缆段两端张力幅值占MBL的百分比(La)Fig.17 Tension amplitudes as % of MBL on the fiber line's two ends 图18 纤维缆段两端动刚度值Fig.18 Dynamics stiffness on the fiber line's two ends 图18为纤维缆两端的动刚度值的计算结果,可以看出动刚度值比静刚度值大得多,且随着上端激励的变化而周期变化。图14、15、17和18表明纤维缆段下端的动张力变化幅值和动刚度变化幅值均比上端大。 本文建立了复合式锚泊系统的动力学模型,将合成纤维缆的动刚度特性应用到组合式锚泊线的数值计算中,通过对一座工作水深为1 500m的组合式锚泊线进行计算,得到以下结论: 1) 传统动刚度计算中因为存在大量的假设和忽略,降低了计算精度,且不适用于不均匀缆和复合式锚泊线中纤维缆的动力学计算。为了精确计算复合式锚泊线上的动张力,应该建立复合锚泊线的动力学模型,并将合成纤维缆的动刚度特性引入到锚泊线的动力学分析中。 2) 在纤维缆的动力学计算中应采用分段动刚度的方法计算各缆段上的动刚度和动张力。传统方法中取恒定预张力作为平均张力的方法不再适用,可采用基于统计的方法计算各缆段的平均张力,并用于该缆段上动刚度的计算。 3) 采用动刚度方法得到的复合式锚泊线动张力远大于静刚度下的计算结果,因而在合成纤维缆的动力学计算中必须考虑其动刚度特性。 4) 最终计算结果显示,锚泊线首端无激励时首尾两端的动张力比采用静刚度方法时分别大5.5%和小7.12%;在正弦激励作用下锚泊线首端最大和最小张力比静刚度方法分别大5.79%和7.91%,尾端最大和最小张力比静刚度方法分别大12.34%和7.26%。 本文计算合成纤维缆动刚度和动张力的方法,更有合理性,并考虑到了各因素的影响,能适用于不均匀缆和复合式锚泊线的计算,对于新型复合式锚泊系统的数值分析和工程应用具有重要的意义。 [1]连宇顺, 刘海笑, 黄维. 超深水混合缆绷紧式系泊系统非线性循环动力分析[J]. 海洋工程, 2013, 31(3): 1-8. LIAN Yushun, LIU Haixiao, HUANG Wei. Cyclic nonlinear analysis of ultra-deepwater hybrid mooring systems[J]. The ocean engineering, 2013, 31(3): 1-8. [2]乔东生, 欧进萍. 深水复合锚泊线动力特性比较分析[J]. 船舶力学, 2011, 15(11): 1290-1299. QIAO Dongsheng, OU Jinping. Comparative analysis on dynamic characteristics of deepwater hybrid mooring line[J]. Journal of ship mechanics, 2011, 15(11): 1290-1299. [3]Del VECCHIO C J M. Light weight materials for deep water moorings[D]. Reading: University of Reading, 1992. [4]BOSMAN R L M, HOOKER J. The elastic modulus characteristics of polyester mooring ropes[C]//Proceedings of 1999 Offshore Technology Conference. Houston, Texas: Offshore Technology Conference, 1999 [5]CASEY N F, BELSHAW R, PATON A G, et al. Short-and long-term property behaviour of polyester rope[C]//Proceedings of 2000 Offshore Technology Conference. Houston, Texas: Offshore Technology Conference, 2000. [6]CASEY N F, BANFIELD S J. Full-scale fiber deepwater mooring ropes: advancing the knowledge of spliced systems[C]//Proceedings of 2002 Offshore Technology Conference. Houston, Texas: Offshore Technology Conference, 2002. [7]KIM M S. Dynamic simulation of polyester mooring lines[D]. Texas: Texas A&M University, 2004. [8]TAHAR A, KIM M H. Coupled-dynamic analysis of floating structures with polyester mooring lines[J]. Ocean engineering, 2008, 35(17/18): 1676-1685. [10]刘海笑, 黄泽伟. 新型深海系泊系统及数值分析技术[J]. 海洋技术, 2007, 26(2): 6-10. LIU Haixiao, HUANG Zewei. A new type deep-water mooring system and numerical analytical techniques[J]. Ocean technology, 2007, 26(2): 6-10. [11]黄泽伟. 新型深海系泊系统及数值分析技术[D]. 天津: 天津大学, 2006. HUANG Zewei. A new type deep-water mooring system and numerical analytical techniques[D]. Tianjin: Tianjin University, 2006. [12]张火明, 洪文渊, 王强, 等. 纤维系缆动刚度特性研究[J]. 船舶, 2014(2): 26-32. ZHANG Huoming, HONG Wenyuan, WANG Qiang, et al. Investigation on dynamic stiffness of fiber cables[J]. Ship & boat, 2014(2): 26-32. [13]WALTON T S, POLACHEK H. Calculation of transient motion of submerged cables[J]. Mathematics of computation, 1960, 14(69): 27-46. [14]THOMAS D O. A numerical investigation of time integration schemes applied to the dynamic solution of mooring lines[D]. Newcastle: Newcastle University, 1993. [15]CHAI Y T, VARYANI K S, BARLTROP N D P. Three-dimensional Lump-Mass formulation of a catenary riser with bending, torsion and irregular seabed interaction effect[J]. Ocean engineering, 2002, 29(12): 1503-1525. [16]王飞. 海洋勘探拖曳系统运动仿真与控制技术研究[D]. 上海: 上海交通大学, 2007. WANG Fei. Simulation and control research of marine towed seismic system[D]. Shanghai: Shanghai JiaoTong University, 2007. [17]王飞, 黄国樑. 导流缆拖曳系统准动态运动建模及仿真[J]. 上海交通大学学报, 2012, 46(10): 1658-1664. WANG Fei, HUANG Guoliang. Semi-dynamic modeling and simulation study of underwater faired cable[J]. Journal of Shanghai JiaoTong University, 2012, 46(10): 1658-1664. [18]王飞. 各向异性弯矩扭矩作用下导流缆运动建模与仿真[J]. 哈尔滨工程大学学报, 2013, 34(5): 549-554, 561. WANG Fei. Modeling and simulation of faired cable with anisotropic bending moment and torque[J]. Journal of Harbin Engineering University, 2013, 34(5): 549-554, 561. [19]朱艳杰, 朱克强, 杨冰卡, 等. 基于凝集质量法的海洋缆索动力学建模与仿真技术[J]. 海洋工程, 2014, 32(1): 112-116. ZHUYangjie, ZHU Keqiang, YANG Bingka, et al. Dynamics modeling and emulation technique of the marine cable considering tension and compression bending torsion deformation[J]. The ocean engineering, 2014, 32(1): 112-116. [20]YANG Bingka, ZHU Keqiang, ZHU Yanjie, et al. Dynamic response of towed line array[J]. Journal of hydrodynamics, series B, 2013, 25(4): 616-619. [21]ABLOW C M, SCHECHTER S. Numerical simulation of undersea cable dynamics[J]. Ocean engineering, 1983, 10(6): 443-457. [22]HUANG Shan. Dynamic analysis of three-dimensional marine cables[J]. Ocean engineering, 1994, 21(6): 587-605. [23]常洪波, 李红霞, 黄一, 等. 海底倾斜及摩擦对系泊缆动张力的影响[C]//中国造船工程学会2013年船舶水动力学学术会议论文集. 西安: 中国造船工程学会, 2013: 297-303. Dynamics properties of a deep-water hybrid mooring line ZHU Zhongxian,YIN Yong,SHEN Helong (Laboratory of Marine Simulation & Control, Dalian Maritime University, Dalian 116026, China) With a spar platform operated at a depth of 1 500 m taken as an example, the dynamic stiffness and tension of a new type of hybrid mooring line were calculated. A comparison with the calculation that uses static stiffness indicates that the dynamic stiffness property needs to be taken into account when calculating the synthetic fiber lines. In traditional dynamic stiffness calculation, the tension and strain are assumed to be equal along the line, the line’s weight was not taken into account, and the drag force was ignored; thus, accuracy was decreased. More importantly, the traditional method was not applicable to the calculation of the hybrid mooring line. In this paper, a dynamics model of the hybrid mooring line was established based on the lumped mass method, which calculated the segments’ tension in the average of a synthetic fiber line by statistics, and sectional dynamic stiffness method was used to iterate the dynamic stiffness and tension of every section. The effects of weight, current dynamics, and sea current were investigated. hybrid mooring line; lumped mass method; dynamics model; dynamic stiffness; synthetic fiber line 2015-08-07. 时间:2016-12-12. 国家863基金项目(2015AA016404);交通部应用基础研究项目(2014329225370);中央高校基本科研业务费专项资金项目(3132016310). 朱忠显(1986-),男,博士研究生; 尹勇(1969-),男,教授,博士生导师. 尹勇,E-mail:bushyin@163.com. 10.11990/jheu.201508013 P754.5 A 1006-7043(2017)01-0013-07 朱忠显,尹勇,神和龙. 新型深水复合式锚泊线动力特性分析[J]. 哈尔滨工程大学学报, 2017, 38(1): 13-19. ZHU Zhongxian,YIN Yong,SHEN Helong. Dynamics properties of a deep-water hybrid mooring line[J]. Journal of Harbin Engineering University,2017, 38(1): 13-19. 网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20161212.1631.028.html3 计算案例






4 结论
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
水道港口(2022年1期)2022-05-18
舰船科学技术(2018年8期)2018-09-02
船海工程(2018年1期)2018-03-01
小学生学习指导(高年级)(2017年10期)2017-09-15
小天使·三年级语数英综合(2017年6期)2017-06-07
江苏船舶(2015年1期)2015-05-06
火炸药学报(2014年3期)2014-03-20
船舶(2014年2期)2014-01-04
振动与冲击(2013年15期)2013-06-02
