
一种双余度无刷直流电机转矩脉动抑制控制策略研究
2017-03-02 03:25刘卫国
郑州大学学报(工学版) 2017年1期
刘卫国,霍 达,谭 博,公 超
(西北工业大学 自动化学院,陕西 西安 710129)
一种双余度无刷直流电机转矩脉动抑制控制策略研究
刘卫国,霍 达,谭 博,公 超
(西北工业大学 自动化学院,陕西 西安 710129)
针对两套并联绕组互差30°电角度的双余度无刷直流电机换相转矩脉动问题展开研究.提出一种基于变结构电流前馈的转矩控制方法.该方法结合对应相绕组轴线互差30°的特点,在均流控制的前提下,使用变结构控制策略独立控制两套绕组的电流以保证电机在换相时刻输出稳定的转矩.为了增加电流的响应速度,采用电流前馈控制方法提高电流的变化率.在MATLAB/ Simulink环境下搭建模型进行仿真.结果表明,与传统的双余度电机均流控制策略相比,基于变结构电流前馈的转矩控制策略能够有效地降低电机的换相转矩脉动.
双余度;变结构电流前馈控制;转矩脉动;无刷直流电机
0 引言
目前,在现代航空航天设备中电力传动系统已经逐步开始取代传统的气动和液压传动系统[1-5],而电机作为现代航空航天设备的电力传动系统中重要的执行元件,保证电机在整个系统的高可靠运行格外重要[2].永磁材料的性能优化也为电机应用于航空航天领域奠定了基础[3].为了增加系统的可靠性,双余度无刷直流电机正在被广泛地应用于航空航天等对可靠性要求高的领域[4-5].根据双余度无刷直流电机在结构上的不同,可分为两种类型:并联结构型和串联结构型[6-7].串联结构电机体积较大且两套绕组同槽放于定子铁心上;并联结构电机两套独立的电枢绕组互差30°隔槽嵌放于定子铁心上.笔者研究的是基于两套绕组隔槽嵌放的电机结构.双余度无刷直流电动机的转矩脉动是影响其调速性能的因素,转矩脉动的有效抑制是近年来无刷直流电机领域研究的热点和难点[7-8].转矩脉动产生的原因主要有:换相引起的转矩脉动、电磁因素引起的转矩脉动、电枢反应引起的转矩脉动和齿槽效应引起的转矩脉动[7],笔者从控制角度分析,对于双余度无刷直流电机换相转矩脉动抑制问题展开探究.文献[9]从理论上详细分析了换相转矩脉动产生的原因并推导出转矩脉动公式,提出了一种基于电流预测控制的换相转矩脉动抑制方法,并通过实验验证了该算法的有效性;文献[10]通过研究非换相的相电流在换相时期的变化,提出了保持非换相电压不变的方法抑制转矩脉动,实验验证了该算法的可行性.笔者针对两套并联绕组互差30°电角度的双余度无刷直流电机转矩脉动问题展开研究.
1 双余度无刷直流电动机换相转矩脉动分析
在不考虑任何PWM调制的前提下,对两个余度的换相转矩脉动进行分析.
双余度无刷直流电机功率拓扑结构如图1所示,图中T1~T6和D1~D6是余度1的功率开关器件;T7~T12和D7~D12是余度2的功率开关器件;a、b、c和a′、b′、c′分别是余度1和余度2三相星形联接的集中式整距绕组,a和a′、b和b′、c和c′的绕组轴线互差30°电角度隔槽嵌放.
假设余度1处在换相阶段,由a、b相换到a、c相,开关状态为T1、T6开通切换至T1、T2开通.因b相电流无法突变,要经过二极管进行续流,其续流回路如图2所示.换相完成后T1、T2开通回路如图3所示.
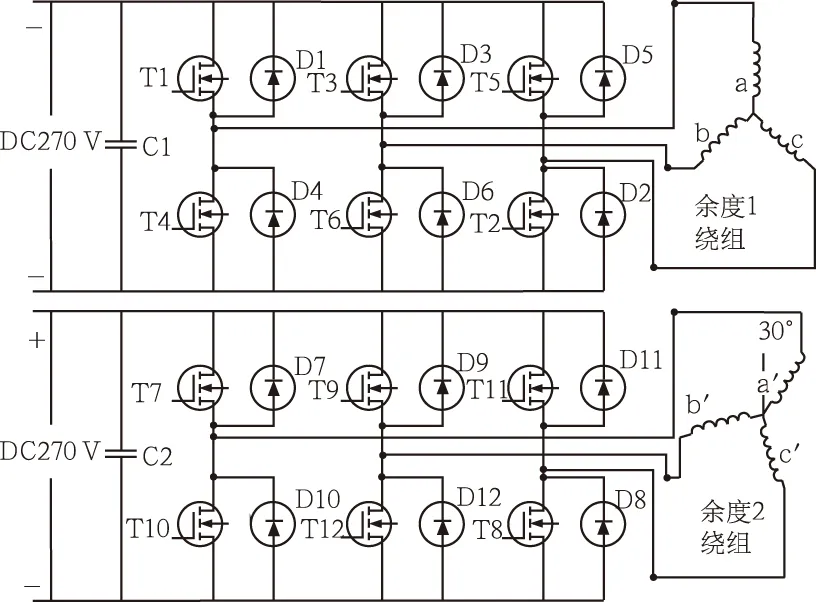
图1 双余度功率拓扑结构示意图Fig.1 Dual-redundancy power topology
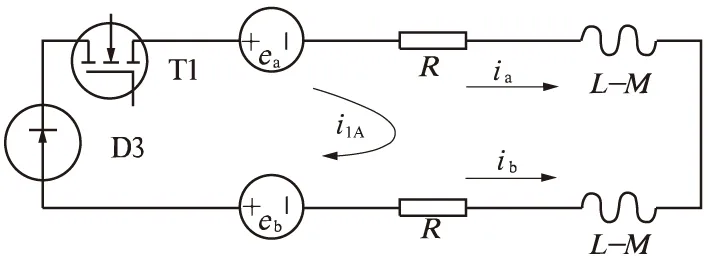
图2 b相续流回路电路Fig.2 Continuous current loop in phase b
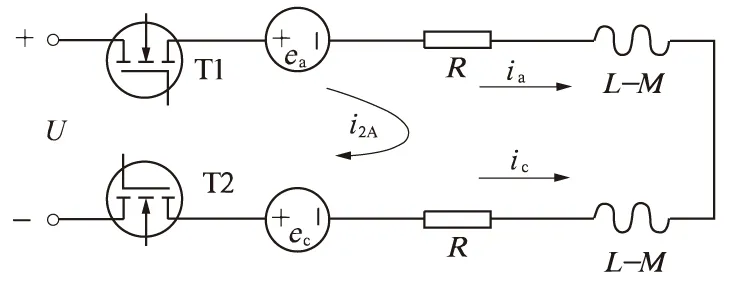
图3 T1和T2导通等效电路Fig.3 Equivalent circuit when T1 and T2 are on
图2和图3中L为电感自感,M为电感间的互感,由两个等效电路可列出方程组为:
根据无刷直流电机转矩方程,忽略绕组电阻的影响,可推得余度1的转矩为:
(2)
余度1的换相转矩脉动为:
(3)
式中:I1为换相过程中a相电流的初始值.
余度2正常导通,对应a′,b′相导通,c′相关断.等效电路如图4所示.
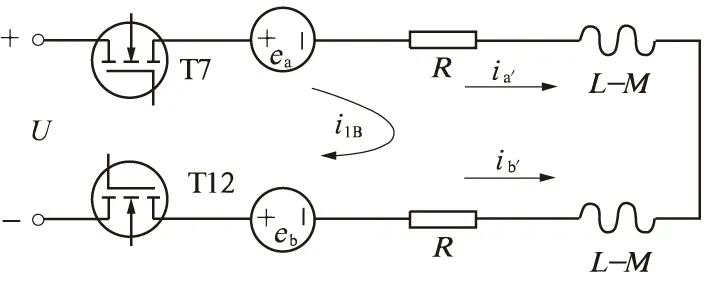
图4 T7和T12导通等效电路Fig.4 Equivalent circuit when T7 and T12 are on
由等效电路可列出方程组为:
根据无刷直流电机转矩方程可推得余度2转矩为:
(5)
余度2的换相转矩脉动为:
(6)
式中:I2为a′相电流的初始值.
两个余度的合成换相转矩脉动为:
(7)
当反电势E<5U/14时,换相转矩脉动为正;当反电势E=5U/14时,换相转矩脉动为零;当反电势E>5U/14时,换相转矩脉动为负.
2 变结构电流前置反馈补偿的转矩控制
2.1 双余度无刷直流电机传统控制策略
目前,双余度无刷直流电动机的主要控制方案之一为采用两个余度均流控制[11-13],其控制框架如图5所示.
系统组成包含控制器、驱动器和电动机3部分.其中控制器完成速度闭环,并且实现余度管理,驱动器分别包含两个独立的驱动单元A和B,电机包含两套独立的绕组和一个旋转变压器,旋转变压器作为转子位置和速度传感器.
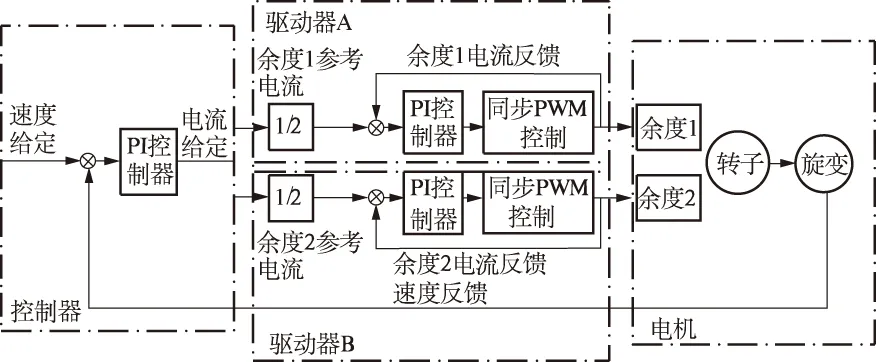
图5 均流控制系统原理框图Fig.5 Current-sharing strategy system
均流控制原理为:两个余度共用一个速度环,由旋转变压器得到的转速反馈与给定转速进行计算,输出的差值经过PI调节器后再经1/2均流处理作为两个余度电流环的输入.电流环的给定与采样余度的电流反馈信号计算产生PWM信号输出到驱动电路模块,驱动信号控制开关管的导通时序在绕组中产生脉动旋转磁场,使电机运转.
2.2 变结构控制方法
均流控制方法实现了两个余度的均流,但是没有考虑电机的转矩脉动抑制问题.
根据上述分析,结合双余度绕组并联互差30°电角度的特征,笔者提出一种变结构的电流前置反馈补偿的转矩控制方法.切换函数S设计为:
(8)
式中:KT为转矩系数常量;eTA为余度1的转矩估计误差;eTB为余度2的转矩估计误差.
控制器最终输出设为u1和u2,其表达式为:
(9)
式中:k1、k2为两个加权系数函数.以a相和a′相为例构造函数sign(ta)、sign(ta′),表达式分别为:
(10)
(11)
式中:t1为余度1换相开始时刻;t2为余度1换相结束时刻.余度1换相时刻延迟π/6即为余度2的换相时刻.
换相开始时刻t1由转子位置信号获取,将换相时长Δt和换相结束时刻t2代入式(4)得到的方程组为:
(12)
由上式可得:
(13)
其他两相b、c与a相似,分别相差120°和240°电角度.
构造函数的目的是对两个余度的换相阶段与非换相阶段进行判断,换相脉动阶段函数值置“1”,其余阶段置“0”,以区分控制策略中的双绕组对应的3种工作状态:
1)余度1换相,余度2不换相;
2)余度2换相,余度1不换相;
3)余度1、余度2均不换相.
提出的变结构控制原理框图如图6所示.
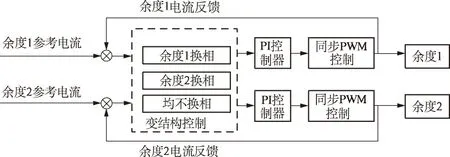
图6 变结构控制原理框图Fig.6 Variable structure control method
2.2.1 前馈控制
当余度1出现换相转矩脉动时,变结构控制通过余度2产生转矩补偿.由于换相过程较短,如算法的实时性较低,将导致补偿效果较差,甚至产生震荡.通过电流前置反馈的方法提升控制实时性,实现快速补偿.
以余度1为例,前馈环节的原理框图如图7所示.
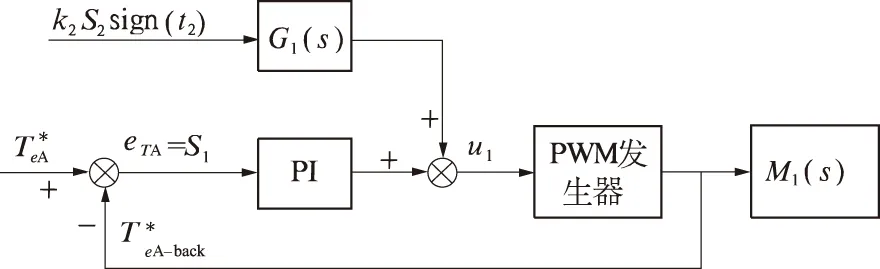
图7 余度1前馈环节原理图Fig.7 Feedforward control in 1st redundancy
图7中前馈环节的传递函数为:
(14)
式中:M1(s)为电机的传递函数.前馈函数能够使S2在余度1迅速产生补偿波动,来抵消余度2上的换相转矩脉动.
2.2.2 变结构电流前置反馈补偿的转矩控制
当余度1处于换相状态,余度2处于非换相状态,此时切换函数S1为余度1的换相转矩脉动,S2为余度2的非换相转矩脉动,根据式(10)和式(11),sign(ta)为1,sign(ta′)为0,最后产生的前馈信号u1、u2为:
(15)
对于余度1,S1用来维持自身转矩输出.而u2由S2和k1S1两部分组成,S2是用来维持自身的转矩输出,k1S1则是用来抑制余度1的换相转矩脉动,它通过在余度2中产生补偿电流脉动,引起补偿转矩脉动,使两个余度的换相转矩脉动相互抵消,达到抑制合成转矩脉动的目的.k1加权系数函数则是通过绕组电流反馈产生,k1变化趋势与换相的相电流变化趋势相关.
当余度2绕组存在换相转矩脉动时,产生的前馈信号u1、u2为:
(16)
控制器的工作状态分析与上述原理类似,此时余度1快速产生的补偿转矩脉动与余度2的换相转矩脉动相互抵消,对转矩脉动进行抑制.
当两个余度均处在正常非换相状态时,产生的前馈信号u1、u2为:
(17)
此时两个余度没有换相转矩脉动.
系统控制策略需首先对两个余度的工作状态进行识别,然后针对不同的状态产生电流前馈补偿,削弱两个余度的合成输出转矩脉动,控制原理框图如图8所示.
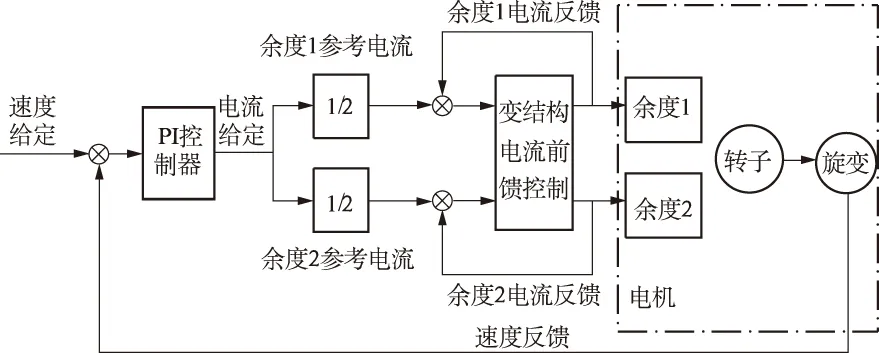
图8 变结构前馈控制原理框图Fig.8 Variable structure control with current feedforward
3 仿真结果分析
在MATLAB/Simulink中搭建仿真模型,电机参数:额定电压U=270 V,额定功率P=2 kW,额定转速n=8 000 r/min,两个余度绕组的相电阻R=0.02 Ω,相电感L=0.1 mH,给定转速n=5 000 r/min,负载转矩T=10 N·m.
双余度无刷直流电动机使用均流控制策略的仿真波形如图9所示;采用基于变结构电流前馈转矩控制策略的仿真波形如图10所示.
通过对比图9(a)与图10(a)可见,余度2的相电流在余度1的换相阶段产生了3 A的补偿波动;观察图9(b)和图10(b)发现,余度2在换相阶段产生的1 N·m转矩脉动由余度1中产生的补偿波动抵消.
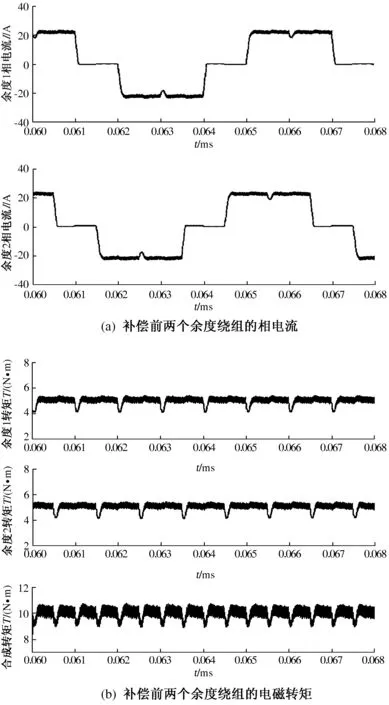
图9 均流控制的仿真曲线Fig.9 Curve of current-sharing strategy
图9(b)是均流控制策略的合成输出转矩仿真波形,与图10(b)的变结构电流前馈转矩控制策略比较,换相转矩脉动得到明显抑制,合成转矩脉动抑制效果为56.3%.
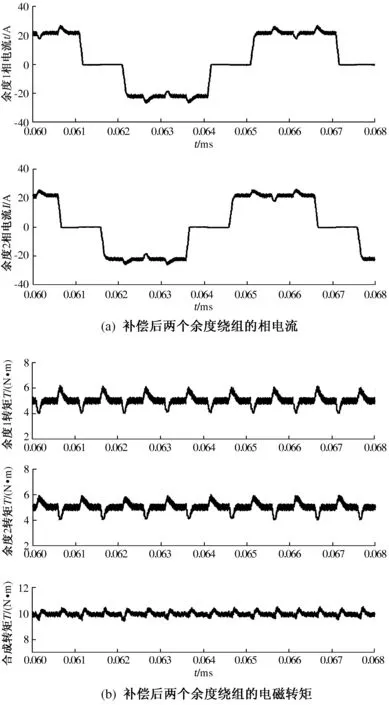
图10 变结构电流前馈控制的仿真曲线Fig.10 Curve of variable structure control with current feedforward
4 结论
笔者针对双余度无刷直流电机,提出了一种变结构电流前馈转矩控制策略,在均流环节输出端采用变结构电流前馈控制,在保证电流反馈实时性的基础上,有效地抑制了双余度绕组的换相转矩脉动.通过仿真研究,该方法在减小换相转矩脉动的基础上,与常规的均流方法相比,具有算法结构简单、易于实现的优点,具有较广泛的应用价值.
[1] 周奇勋,李声晋,卢刚,等.双余度机载永磁无刷直流伺服系统转矩均衡性[J].电工技术学报,2009,24(6):17-23.
[2] 周元钧.双绕组无刷直流电动机的数学模型与转矩特性[J].电工技术学报,2004,19(4):12-17.
[3] 李福山,王金磊,董晓源,等.Nd8.5Fe84Nb0.5Zr0.5B6Cu0.5稀土永磁合金磁性能的研究[J].郑州大学学报(工学版),2015,36(3):82-86.
[4] 罗战强,丁文,杨新团,等.双余度永磁无刷电机系统数学模型与特性分析[J].电机与控制学报,2013,17(3):20-27.
[5] 闫浩.双绕组无刷直流电机运行策略的研究[D].哈尔滨:哈尔滨工业大学电气工程学院,2013:1-6.
[6] 马瑞卿,刘卫国,解恩.双余度无刷电动机位置伺服系统仿真与试验[J].中国电机工程学报,2008,28(18):98-103.
[7] 汪光照.直流无刷电机转矩脉动抑制方法研究[D].哈尔滨:哈尔滨工程大学电气工程学院,2014:2-5.
[8] GAO J,HU Y.Direct self-control for BLDC motor drives based on three dimensional coordinate system[J].IEEE transactions on industrial electronics,2010,57(8): 2836-2844.
[9] 王晓远,傅涛王,晓光基.基于电流预测控制的无刷直流电动机换相转矩脉动抑制[J].电工技术学报,2015,30(11):22-29.
[10]宋飞,周波,吴小婧.抑制无刷直流电机换相转矩脉动的新型补偿策略[J].电工技术学报,2008,23(11):28-33.
[11]丛新勇,吕永健,李子龙.一种同时抑制BLDCM两种转矩脉动的方法研究[J].微电机,2013,46(9):68-84.
[12]MA R Q,LIU W G,LUO G Z, et al.The balanced current control of dual-redundancy permanent magnetic brushless DC motor[C]//Proceedings of the eighth international conference on electrical machines and systems.Nanjing:IEEE,2005:475-479.
[13]李榕,刘卫国,马瑞卿,等.双余度无刷直流电动机伺服系统电流均衡性研究[J].电工技术学报,2005,20(9):77-81.
A Torque Ripple Suppression Method in Dual-redundancy Permanent Magnet Brushless DC Motor
LIU Weiguo, HUO Da, TAN Bo, GONG Chao
(School of Automation, Northwestern Polytechnical University, Xi’an 710129, China)
In view of commutation torque ripple in two sets of parallel winding with difference of 30 electrical degrees in dual-redundancy brushless DC motor, a technique with variable structure and current feed-forward was put forward. Current could be adjusted independently by this strategy, combined with the characteristic of the difference of 30 electrical degrees in the corresponding phase to ensure the stability of commutation torque. In order to increase the response from current,feed-forward control was proposed to improve the current charge rate. The results showed that, compared with traditional method, it could minimize the commutation torque ripple in double-winding permanent brushless DC motor and enhance the stability of the operating system.
dual-redundancy; variable structure with current feed-forward control; torque ripple; brushless dc motor
1671-6833(2017)01-0050-06
2016-03-25;
2016-05-18
高等学校博士学科点专项科研基金资助项目(20136102120055)
刘卫国(1960— ),男, 河南正阳人,西北工业大学教授,博士生导师,主要从事运动控制、电气伺服控制以及电机控制技术的应用与研究等,E-mail:lwglll@nwpu.edu.cn.
TM33
A
10.13705/j.issn.1671-6833.2016.04.031
猜你喜欢
大电机技术(2022年5期)2022-11-17
中国特种设备安全(2022年3期)2022-07-08
汽车实用技术(2022年12期)2022-07-05
微特电机(2020年11期)2020-12-30
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
舰船科学技术(2015年8期)2015-02-27
地震研究(2014年1期)2014-02-27
中国新技术新产品(2014年4期)2014-01-24
科学之友(2011年7期)2011-04-12
