
艇模水下伴流测量方法试验
2017-03-04 06:57汪小翔许靖锋李徐廉滋鼎
船海工程 2017年1期
汪小翔,许靖锋,李徐,廉滋鼎
艇模水下伴流测量方法试验
汪小翔,许靖锋,李徐,廉滋鼎
对某艇模进行水下快速性试验,分析得到其自航状态下的实效伴流分数,采用三维伴流测试系统对其艉流场进行伴流测量,得到其标称伴流及三向伴流分布。结果表明,艇模桨盘面处伴流以轴向伴流为主,内半径在艉舵之间产生了范围较大的轴向高伴流区,而外半径在舵后产生了范围较小的小伴流峰,且由于螺旋桨的抽吸作用,导致桨盘面处流速增大,因而实效伴流小于标称伴流。
艇模;水下快速性;实效伴流;标称伴流
随着潜艇不断向大型化、高速化发展,对主机的功率要求也越来越大,造成艇艉桨负荷[1]较大。潜艇周围的流场特别是艉流场的流动特性对潜艇的水动力性能有着重要的影响[2]。由于水下试验条件限制,国内关于快速性试验[3]以及流场测试试验[4]以常规水面船舶为主,关于水下潜器尾流场研究大多集中在数值仿真方面,很少有关于水下潜器流场试验研究的公开资料。鉴于此,针对某潜艇模型搭建水下试验平台,开展桨模敞水试验、艇体全附体模型阻力试验以及艇体与螺旋桨配合的艇模自航试验,分析得到其相当于实艇自航点的实效伴流分数,采用三维伴流测试系统[5]对其艉流场进行伴流测量,获取其桨盘面处的标称伴流值以及三向伴流分布规律。
1 试验设施及仪器
1.1 试验设施
水池池长510 m,池宽6.5 m,池深6.8 m,水深5.0 m。拖车速度范围0.1~22 m/s,车速稳定精度优于0.2%。
试验数据采集和处理分析自动化。
1.2 试验仪器
1)水下专用电测阻力仪。主要用于阻力测量及自航试验中强制力的测量,共2部,单传感器量程2 000 N,采样频率100 Hz。
2)敞水动力仪。主要测量桨所产生推力及转矩,量程:推力1 000 N,转矩50 N·m。
3)三向伴流测试仪。主要包括32路压力传感器系统,数据采集系统,标定除气装置以及转角装置,最大测量半径为140 mm,转角装置控制范围0°~360°,压力传感器量程40 kPa,精度0.5%, 压力变送器量程1 000 mm水柱,精度为0.1 mm水柱,系统测量潜艇伴流场安装示意见图1。
2 模型及测试方法
2.1 桨模及艇模
桨模采用高强度铝合金材料加工而成,模型表面光顺、连续无突变,表面粗糙度及精度符合相关规范要求[6]。艇模主要参数见表1。
由于需要进行动力仪的拆装以及内部放置试验装置,艇模采用分段组装设计,均采用内部钢骨架加外敷玻璃钢的结构形式(见图2),用于试验安装和承力的钢骨架能保证艇模具有足够的强度,外敷玻璃钢保证模型的外形光顺和不变形。
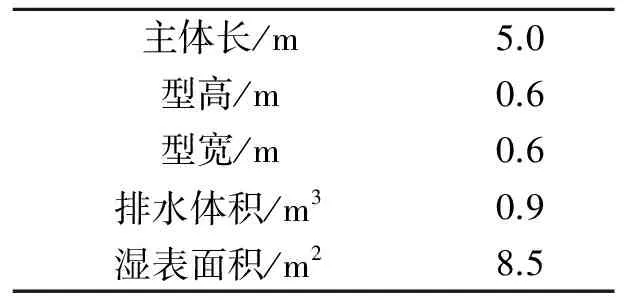
表1 艇模主要几何参数
2.2 系统测试安装
在自航试验以及伴流测试中,试验模型采用双剑方式与拖车进行连接,为尽可能减小表面兴波影响,一般要求浸深比大于0.28[6],同时考虑模型与池底距离以减小浅水效应,整体模型处于无纵倾、无偏转状态,位于水池中心且与轨道中心线平行。
试验过程中需要考虑以下几点。
1)阻力仪的标定。前后剑各安装一个水下阻力仪,直接测量艇体遭受强制力,试验前首先在平台上对单个水下阻力仪进行标定,然后再对双阻力仪系统进行标定,保证双阻力仪系统技术指标满足试验要求。
2)动力仪标定。从静态标定结果曲线可以看出推力相关系数为1,转矩相关系数为0.999 5,线性度非常高,推力和转矩相互干扰极小,动态标定采用标准桨模P4119[7]进行标校,与ITTC数据进行比较,结果见图3,可以看出推力系数与转矩系数误差均在2%以内,说明仪器的精度可靠。
3)模型完全入水后将产生3 500 N左右的浮力,为减小负浮力对拖曳剑的影响,在模型内部填充泡沫以增加浮力,重心位置低于浮心且位于双剑中间。
4)拖曳双剑与拖车螃蟹架连接,安装时调整好前后航向误差,再将模型吊装至船坞与双剑连接。安装完成后,利用模型的水平基准线与高度尺对模型姿态进行微调,保证模型安装首尾航向误差以及模型首尾高度误差均不大于2 mm,确保模型姿态不影响试验结果的真实性。
5)为避免指挥室围壳对艉流场的影响,三向伴流仪的测试在甲板朝下状态下进行,毕托耙通过艉轴与艇内转角装置相连,毕托耙的转动由周向角控制仪操纵。转角装置的轴线高度可以调节,并可以倾斜,便于安装。转角装置可以水平和垂直2个方向出轴,水平出轴用于水面船模,垂直出轴时通过一根垂直轴与潜艇模型里的直角齿轮箱的竖轴相连。直角齿轮箱的横轴与毕托耙的轴相连,转动潜艇模型的毕托耙,为避免轴过长而晃动,在潜艇尾部加装轴套及轴支架,确保轴能自由稳定转动。见图4。
3 试验
3.1 自航试验
在艇模阻力试验与螺旋桨敞水试验基础上开展自航试验,艇模拖车连接安装基本与阻力试验相同,采用等速度强迫自航法[8],试验速度分别为3.0、3.2、3.4及3.6 m/s,为保证模型边界层在所有速度范围内为紊流,在离艇艏1/20艇长处加装直径为1.0 mm的激流丝。
为了使螺旋桨模型与实桨载荷相似[9],必须从艇模总阻力中扣除某一数值Fd,使得实艇总阻力Rts与Rtm-Fd成λ3的关系,即
(1)
式中:Rts为实艇总阻力;Rtm为艇模总阻力;Fd为强制力;ρs为淡水密度;ρm为海水密度;λ为艇模与实艇缩尺比。
对于艇模来说,由于潜艇有很大流水孔[10]阻力,该阻力无法通过试验进行模拟,只能根据实艇经验估计,因次强制力计算还必须考虑艇模的粗糙度修正。选取粗糙度修正系数▽cf=1.2×10-3。
由式(1)可以推出
式中:sm为艇模湿表面积;Cfm为艇模摩擦阻力系数;Cfs为实艇摩擦阻力系数;Vm为艇模速度。
实船摩擦阻力系数Cfs和船模摩擦阻力系数Cfm,按1957 ITTC公式计算。
(3)
当艇模速度为Vm时,其阻力为Rtm,强制力为Fd,根据自航试验曲线查得强制力为Fd时的螺旋桨转速nm,推力Tm,转矩Qm,此时螺旋桨模型推力Tm所克服的艇模阻力为Rtm-Fd。
螺旋桨艇后推力系数和转矩系数分别为
(4)
(5)
根据等推力法从螺旋桨敞水曲线可读出相应进速系数J,敞水转矩系数kq,敞水效率ηo。
螺旋桨进速Vam=JnmDm
(6)
由式(6)得艇模伴流分数wm为
(7)
自航试验结果见表2。
3.2 三向伴流测试
桨盘面处伴流测试测量半径为r/R=0.4~1.2,为更好地捕捉艉舵对流场的影响,测量角度在艉舵附体后面对应的区域进行加密,拖曳速度3 m/s。伴流测试结果见图5~9。
轴向伴流等值线规律明显,伴流分数从内半径到外半径逐渐减小,即主艇体尾部的粘性边界层使得水流速度从内半径向外半径逐渐增大。在外半径的0°、90°、180°及270°处产生尖峰,此处恰体现了指挥台围壳及尾翼的粘性尾流使得附体后对应位置伴流速度发生的变化。切向、径向伴流矢量图见图6。
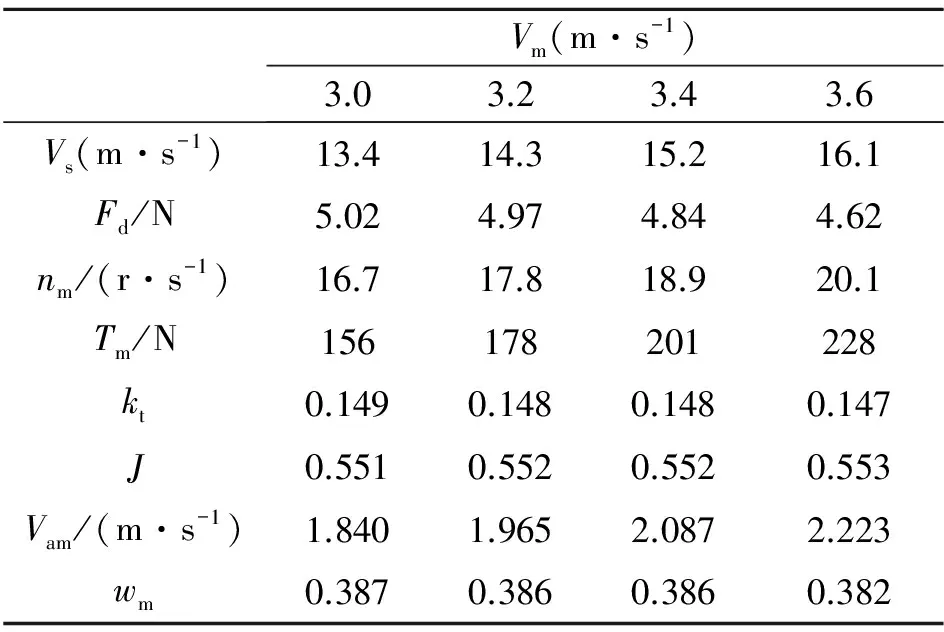
表2 自航分析结果
由6可以看到,径向伴流大于切向伴流,各半径处径向伴流基本呈现向心流动,切向伴流以顺时针流动为主(从艇艉向前看),且内半径流动明显强于外半径。
各个方向伴流周向分布见图7、8。
轴向伴流对称性较好,在内半径45°、120°、240°及315°附近出现高伴流区域,此处位于尾翼之间,可能产生了一定的漩涡运动,而在外半径则在0°、90°、180°和270°附近还有小范围的峰值,此处恰好在尾翼后,即尾翼的存在使得此处相对水流速度变小,随着半径增大,伴流分数逐渐减小,此与轴向伴流等值线图也是对应的。
径向伴流的周向分布较为对称,且内半径伴流大于外半径,在内半径的45°、120°、240°及315°处出现相对小峰值,随着半径增大,径向伴流周向分布逐渐变得较为均匀。
各半径处伴流周向平均值为
(8)
各半径处伴流体积平均值为
(9)
式中:rh为桨榖半径;R为螺旋桨半径。
各半径处三向伴流周向平均值与体积平均值见表3。
从表3数值上看,轴向伴流最大,切向伴流最小,轴向伴流与径向伴流都随着半径的增大逐渐减小,从内半径到外半径,切向伴流由逆时针过渡到顺时针。上表值均为标称伴流值,从轴向伴流看,艇模桨盘面处所测标称伴流为0.423,而实效伴流为0.385,由于自航中螺旋桨在后方的抽吸作用,使得桨盘面处水流速度增大,伴流自然比无螺旋桨时要小,这也是符合实际流场状态的,说明试验结果可靠。
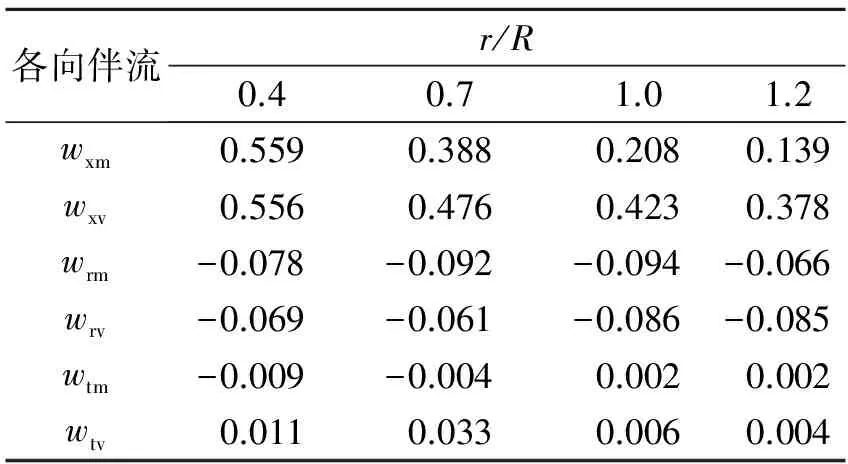
表3 各半径处伴流值
注:wr<0为向心流动;wt<0为逆时针流动(从艇艉向前看)
4 结论
1)艇模桨盘面处伴流以轴向为主,径向伴流与切向伴流均为小量,轴向与径向伴流分布对称性较好,且随着半径增大,轴向与径向伴流均逐渐减小,径向伴流周向分布逐渐变的较为均匀,切向伴流由逆时针过渡到顺时针。
2)由于附体的影响,轴向伴流而言,内半径在两舵之间(45°、120°、240°及315°)产生了范围较大的高伴流区,而在外半径刚好在舵后(0°、90°、180°及270°)产生范围较小峰值,径向伴流在内半径的45°、120°、240°及315°出现小峰值。
3)由于螺旋桨后方的抽吸作用,桨盘面处流速增大,导致自航试验分析所得实效伴流较伴流
测试系统所得标称伴流偏小,符合实际流场状态。
4)相比风洞中采用风速仪研究潜艇尾流场,测量系统直接工作于水下,精确性及可靠性很高,更能模拟实际潜艇三维流场状态,对改善潜艇尾部流场特性,抑制螺旋桨噪声及振动具有重要意义。
[1] 何友声,王国强.螺旋桨激振力[M].上海:上海交通大学出版社,1987.
[2] 盛振邦,刘应中.船舶原理[M].上海:上海交通大学出版社,2004.
[3] 谭廷寿,陈宾康.三桨船船模自航试验分析[J].船海工程,2005(5):20-23.
[4] 郭春雨,陈月钢.王成尧,等.肥大型船舶实效伴流分析及预报[J].船海工程,2014(4):47-50.
[5] 王飞,吴小峰,孟帅.船舶三向伴流测量方法与试验研究[J].武汉理工大学学报,2015(2):35-38.
[6] CB/Z 216—87.潜艇船模水下阻力、自航试验规程[S].北京:中国船舶工业总公司,2008.
[7] 郑巢生,张志荣.基于OpenFOAM的螺旋桨敞水性能研究[J].中国舰船研究,2012(2):88.
[8] 毕毅.潜艇自航模试验技术研究进展.[J].海军工程大学学报,2012,24(5):59-63.
[9] 朱爱军,应良镁,胡科,等.潜器模型水下自航试验分析方法探讨[J].船舶力学,2012(16):384-386.
[10] 张楠,沈泓萃,姚惠之,等.带流水孔潜体流场数值模拟[J].船舶力学,2004,8(1):1-10.
(中国特种飞行器研究所,湖北 荆门 448035)
The Underwater Measurement and Experimental Research on the Wake of Submarine Model
WANG Xiao-xiang, XU Jing-feng, Li Xu, LIAN Zi-ding
(China Special Vehicle Research Institute, Jingmen Hubei 448035, China)
Experimental research on underwater powering performance of submarine model was conducted to analyzing its effective wake fraction. The nominal wake and the 3D wake distribution at the propeller disk were obtained by using 3D wake testing system. The results showed that the wake at the propeller disk is mainly axial wake, the major high-wake part is observed between two rudders at the inside radius, but at the outside radius, the lower-wake peak exactly appears behind the rudders. Because of the pumping action of the propeller, the velocity at the propeller disk increases and the effective wake is less than nominal wake.
submarine model; underwater powering performance; effective wake; nominal wake
10.3963/j.issn.1671-7953.2017.01.008
2016-04-12
汪小翔(1989—),男,硕士,工程师研究方向:水池试验方法及航行体水动性能
U661.7
A
1671-7953(2017)01-0032-05
修回日期:2016-05-04
猜你喜欢
中学生数理化(高中版.高一使用)(2021年3期)2021-06-09
航空发动机(2021年1期)2021-05-22
火箭推进(2020年6期)2021-01-05
舰船科学技术(2020年6期)2020-11-27
航空发动机(2020年3期)2020-07-24
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
北京航空航天大学学报(2017年2期)2017-11-24
北京航空航天大学学报(2017年4期)2017-11-23
中学科技(2017年10期)2017-11-04
