
起落架磁流变减震器半主动控制研究
2017-03-10 21:56赵传东闫国华
中国科技纵横 2017年1期
赵传东++闫国华

摘 要:对飞机起落架减震半主动控制方法进行了研究,将鲁棒控制理论中的控制用于起落架的磁流变减震器的控制设计,设计了控制器。在Matlab中搭建Bouc-Wen模型和控制器。对被动控制、天棚控制和控制进行对比仿真分析。结果表明,在飞机着陆时,控制方法使减震器能量吸收和耗散快、垂直振动小,减震效果明显优于被动和天棚控制策略。控制器对系统参数变化具有較好的鲁棒性。
关键词:起落架;磁流变减震器;控制;鲁棒性
中图分类号:TH137 文献标识码:A 文章编号:1671-2064(2017)01-0104-04
引言
减震器在当飞机进行着陆撞击、跑道滑行时减缓飞机产生的振动,降低飞机地面载荷,提高乘员舒适性,保障飞机飞行安全等方面发挥着极其重要的作用。随着航空工业的发展,现代飞机对起落架的缓冲系统及其控制系统提出了更高的要求。半主动控制结构简单,能耗低,可靠性高,控制效果接近主动控制。随着磁流变(MR)阻尼器的半主动控制研究蓬勃发展,其在飞机起落架上也很好的应用前景。
本文在Matlab中建立飞机起落架和磁流变减震器的数学模型,基于鲁棒控制理论设计一个控制器,通过改变线圈的电流来调节可控阻尼力,从而来实现对起落架的减震控制。将控制策略与被动、天棚(Skyhook)控制进行对比分析。仿真验证了本文提出的鲁棒控制策略用于飞机起落架减震器上有较好的控制效果。
1 磁流变减震器特点及其模型
磁流变液在磁场作用下,它可在瞬间内(毫秒级)由流动性能良好的牛顿流体变为Bingham半固体,且这种变化连续、可控、可逆。由磁流变液组成的减震器称为磁流变减震器。
磁流变减震器虽然具备良好的阻尼力特性,但动力测试结果表明,该类阻尼器的动力特性[5]表现出强烈的非线性滞回特性。而起落架减震过程的快速性和有效性都对MR减震器的力学模型提出了较高的要求。为了充分发挥MR减震器良好的半主动性能,需要有精确的、简单实用的力学模型,以保证控制算法的实时有效。
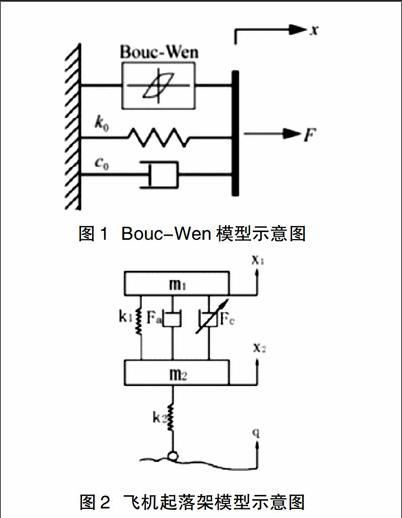
选择Bouc-Wen模型[6]模拟磁流变减震器的动态特性。该模型如图1所示,模型表达式为:
式中,c0是弹簧的初始变形,c和分别是相对位移和相支速度。
2 起落架减震半主动控制数学模型
为模拟飞机着陆时的状态,便于分析。建立图2所示的考虑二自由度的起落架运动模型[7]。其中,m1和m2分别为机身质量和机轮质量;k1为磁流变缓冲器的油液压缩弹性系数;k2是轮胎刚度;q为跑道输入激励;x2为轮胎重心位移; x1为机身重心位移。通过受力分析得:
式中,Fa为油液阻尼系数,Fc为由磁场强度决定的可控阻尼力。
根据示意图也可以定义系统的状态变量为,其中x1-x2为悬架动行程,为机身质量绝对速度,x2-q为机轮形变量,为机轮质量绝对速度,则可将方程(3)和(4)写成状态方程的形式:
3 半主动控制器设计
3.1 天棚控制
理想天棚控制[8]是假设机身质量与惯性参考地面之间具有阻尼。天棚阻尼力为:
其中,Csky是天棚阻尼系数,由系统优化参数确定。磁流变减震器的可控阻尼力应该尽量满足下式
即和应该同向。可控阻尼最大输出力为Fcmax和Fcmix最小输出力为,则Fc可以表示为
3.2 鲁棒控制器设计
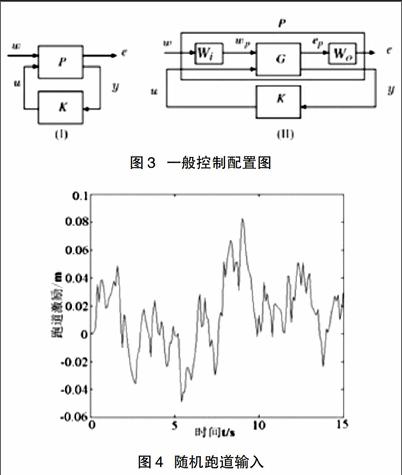
控制系统的最优化是极小化某些闭环系统频率响应的峰值。一般控制配置如图3所示。
控制[9-11]由图3表述,其中P(s)是一个线性系统,表示如下
w为外部输入向量,u是控制输入向量,e是控制输出向量,y是测量向量。控制设计是由增广对象模型P(s)和控制器K(s)组成,通过给定的和控制信号u(=K(s)y)确保闭环系统内部稳定和抵消w和e的影响,从而最大限度地减少从外部输入w对控制输出(e)的闭环影响。预先设定的衰减水平为γ,则控制问题是设计一个内部稳定的闭环系统控制器并确保:
(13)其中
是从w到e的闭环传递矩阵,是的最大奇异值。
本文是在控制策略的基础上发展的运动方程,用以提高着陆性能。控制器的目标是最大限度地减少机身的垂直加速度。选择轮胎压缩量x2-q的动载荷和悬架行程为评价变量。被控系统的状态方程(5)和输出方程如下
式中,z1和z2分别为垂直加速度和动静载荷比,z=[z1 z2]表示性能输出。
对飞机起落架系统的状态方程(5),设计状态反馈控制器为K期望阻尼力控制输入满足:
使闭环系统(15)从跑道激励输入到减震器垂直加速度的传递函数Gr(s)的范数最小,即:
式(18)中的范数是沿频率轴上的最大值,而现在要使其最小,这个问题的解是遍历所有的w,使所有最大奇异值都达到最小值γ0。控制器K(s)须使闭环系统内部稳定,系统状态满足相应约束条件。如果系统内稳定,则一定存在一个正定矩阵和对应的二次Lyapunov函数满足式子。对于给定的,若存在矩阵,对称矩阵Q,X,Z,使得下述规划问题
则状态反馈控制器K=YQ-1存在。
4 仿真结果分析
为了验证所设计的半主动控制系统的有效性,取飞机各参数如下表1进行仿真分析。将被动控制、天棚控制和控制进行仿真,可得到不同跑道下的状态响应。图4为飞机着陆时的随机跑道激励输入。
图5为机身垂直加速度响应,从图中可以看出天棚比被动控制效果好,采用控制更好的降低机身垂直加速度,保护机身结构和提高乘客的舒适性。
图6说明半主动控制能减少机身的位移,其中控制效果非常明显。从图7可以看出起落架动挠度在控制时比被动控制要减小。图8说明三种方式下的轮胎动载荷基本一致,效果较好。图9给出了不同时刻减震器输出的控制力。减震器最大输出力由其自身结构特性所决定,最小输出力为被动时的油液阻尼力。
5 结语
在本文中,对两个自由度下的飞机起落架进行了天棚和控制的半主动控制方法研究。在鲁棒控制理论基础上设计了一种控制器,并且将其与被动控制和天棚控制进行比较分析。仿真结果表明,在飞机着陆撞击时,使用控制方法的半主动磁流变减震器起落架系统能很好的改善飞机着陆对机身结构冲击和乘客舒适度的影响。
参考文献:
[1]郦正能,程小全.飞机部件与系统设计[M].北京:北京航空航天出版社,2006.
[2]Carlson J D,Catanzarite D M,St Clair K A. Commercial magneto-rheological fluid devices devices[J].International Journal of Modern Physics B,1996,10(23-24):2857-2865.
[3]Keum-Shik Hong. Modified Skyhook Control of Semi-Active Suspension:A New Model,GainScheduling,an Hardware-in-the-loop Tuning [J].Transactions of the ASME,2002,12 (4):158-167.
[4]Eltantawie M A.Forward and inverse fuzzy ma-gnetorheological damper models for controlpurpos- es[J].ICGST-ACSE,2010,10(1):1-9.
[5]周強,瞿伟廉.MR阻尼器的两种力学模型和试验验证[J].地震工程与工程振动,2002,22(4):144—150.
[6]周云,谭平.磁流变阻尼控制理论与技术[M].北京:科学出版社,2007.
[7]聂宏,魏小辉.飞机起落架动力学设计与分析[M].西安:西北工业大学出版社,2013.
[8]赵云堂,陈思忠.磁流变半主动悬架的天棚控制方法研究[J].汽车工程学报,2011,1(2):127-133.
[9]Ajinkya A. Gharapurka. Semi-Active Control of Aircraft Landing Gear System UsingH-infin- ity Control Approach[C]. 2013 International Conference on Connected Vehicles and Expo (ICCVE):679-686.
[10]Damien Sammier.Skyhook and H8 Control of Semi-activeSuspensions: Some Practical Asp-ects[J].Vehicle System Dynamics ,2003, Vol.39(4): 279-308.
[11]卢亚慧.基于磁流变阻尼器双曲正切逆模型的半主动悬架控制研究[D].哈尔滨:哈尔滨工业大学,2015,3(4):33-36.
猜你喜欢
中原商报·科教研究(2021年6期)2021-05-13
百科探秘·航空航天(2020年8期)2020-07-29
农业机械学报(2020年2期)2020-03-09
军民两用技术与产品(2019年12期)2020-01-19
中华建设(2019年7期)2019-08-27
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
教练机(2013年3期)2013-10-11
