一种多径环境下麦克风阵列时延估计算法★
2017-03-16 12:00张永棠
电子产品可靠性与环境试验 2017年1期
张永棠
(广东东软学院计算机科学与技术系,广东 佛山 528225)
一种多径环境下麦克风阵列时延估计算法★
张永棠
(广东东软学院计算机科学与技术系,广东 佛山 528225)
针对多径环境下麦克风阵列时延估计问题,将归一化最小均方误差法(NLMS)与互关联法(CR)相结合,提出了NLMS-CR算法。对该算法的结构和原理进行了详细的分析,并将其与传统的相位变换广义互相关法 (GCC-PHAT)和NLMS进行了比较;同时,在不同的信噪比 (SNR)与声源环境下验证了该算法的效能。仿真结果表明:在较严重的多径环境下,NLMS-CR的性能优于其他传统的算法;当信噪比较高且接收信号相关性较低时,NLMS-CR具有很高的时延估计准确率。
多径环境;麦克风阵列;时延估计;算法;通信性能
0 引言
声源时延估计是一种通信系统中常见的时延估计方法。但是,由于实际地面和周围障碍物的反射影响,发射信号都是经过多条不同的路径,以不同的时刻到达麦克风阵列的,这样会形成多径效应(也被称为混响)[1],从而影响声源时延估计的准确率。为此,本文对多径环境下麦克风阵列时延估计问题进行了研究。
最初的时延估计方法为互相关 (CC:Cross-Correlation)法,该方法通过计算麦克风对接收信号间的互相关函数的最大峰值所对应的时间偏置来估计时延;Knapp[1]和Carter[2]对CC法做了推广,提出了相位变换广义互相关法[3](GCCPHAT:Phase Transform Generalized CC),对接收信号作相位加权滤波后再进行互相关处理,使主瓣更加尖锐,同时抑制旁瓣;另一种常见的时延估计法为最小均方误差 (NLMS:Normalized Least Mean Square)自适应算法,其根据当前输入信号自适应地调整滤波器权系数,使输出误差信号达到最小,收敛时权矢量的峰值时偏即为所求得的时延估计。
上述算法均是基于理想的单通道传播模型进行的,在多径环境下,这些算法的性能急剧地下降。为此,借鉴SIMO系统的盲辨识技术,文献 [1]提出了自适应特征分解 (AED:Adaptive Eigenvalue Decomposition)算法,该方法直接求取声源到双麦克风间的传播声信道冲激响应,并以两者峰间时差作为估计的时延,从而可用于解决多径环境下的时延估计问题,但特征值分解的计算量较大,当多径冲激的响应长度过大时,无法实时处理。受AED算法的启发,将NLMS与不同信道间的相互关联性(CR:Cross Relation)相结合,文献 [2]提出了NLMS-CR算法。本文在此基础上,考虑负时延的情况,对算法的推导和验证做出了优化与完善。
1NLMS-CR时延估计算法
考虑多径环境下的双麦克风阵列接收模型。声源信号以平行波方式传向麦克风阵列,令波达方向为θ,麦克风1的输出为x1(n),麦克风2的输出为x2(n),则麦克风1相对于2的时延采样值为:

式 (1)中:D——双麦克风阵列阵元间距;
fs——该数字系统模型的采样率;
c——声信号在空气中的传播速度。
nτ若为负值则表示超前。当接收端不存在加性噪声时,该麦克风阵列阵元接收信号可表示如下:
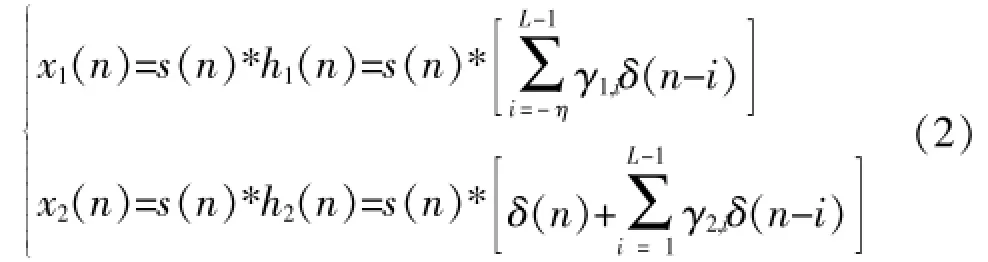
式 (2)中:s(n)——源信号相对直达波信号的归一化信号;
h1(n),h2(n)——两麦克风声传播信道的冲激响应;
γm,i,m=1,2——两麦克风信道上各个采样点的离散幅值;
L——2条信道长度的较大值[2]。
由信道间的相互关联性及线性卷积的交换律[2],同时考虑存在超前的可能,可得:

将上式展开,得:

当接收端存在噪声时,(3)式两端不严格相等,存在误差,定义误差函数为:

将 (5)式改写为矢量形式得:


为了保证收敛,μ的取值应满足0<μ<2;ε是小正常数,以防止除数为零。
由 (7)式可得,NLMS-CR的系统框图如图1所示:
式 (6)中:
y1(n)=[x1(n-η-1),…,x1(n-η-L+1)]T;
y2(n)=[x2(n), …, x2(n-η-L+1)]T;
g1=[h1(-η), …, h1(0), …, h1(L-1)]T;
g2=[h2(1), …, h2(L-1)]T。
令 u (n) =[gT1, -gT2]T, y(n) =[yT2(n),[yT1(n)]T,得到NLMS算法迭代方程为:
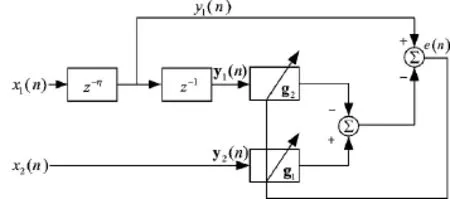
图1 NLMS-CR的系统框图
在NLMS-CR时延估计算法中,h1(n)在-η~η之间的最大峰值位移表示估计的时延,根据SIMO盲信道辨识理论,欲保证麦克风阵列多径声传播信道的可辨识性,须满足如下条件[4]。
a)多径声传播信道的冲激响应具有互异的零点。
b)声源信号是不相关或弱相关的,即其短时自相关矩阵满秩。
2 仿真结果及分析
为了验证所提算法的性能,我们做了大量的仿真。实验在模拟房间中进行,房间尺寸为1.5×1.5× 3,声源s的坐标为 [1,1.2,1.7]T,2个全向接收麦克风 r1、 r2的坐标分别为 [0.2, 0.4, 0.6]T、[0.5,0.4,0.6]T,所有的尺寸及坐标的单位均为m;房间天花板、地面和四周墙壁的吸收系数均为0.4。由镜像法[5]产生的2条室内多径声传播信道冲激响应h1(n)、h2(n)如图2所示,混响时间约为
62.5ms,多径声传播信道1与2的直达波间的时间约差6个采样点。
声源信号采用高斯白噪声,采样率为16 kHz,接收端信噪比 (SNR:Signal-to-Noise Ratio)为50 dB。为了便于比较,给出上述强多径环境下GCCPHAT、NLMS和本文所提算法NLMS-CR的仿真结果,如图3-5所示。由图3-5可以看出,SNR为50 dB时,GCC-PHAT和NLMS的估计误差很大,而NLMS-CR的估计结果与实际值相同。但这只是一次仿真的结果,我们需要研究大量的实验情况下的仿真结果。为此,我们分别在不同的SNR条件下对NLMS-CR算法进行1 000次仿真;同时,将上述高斯白信号通过冲激响应为H(z)=
0.0272+0.046 2z-1+0.046 2z-2+0.027 2z-3的滤波器产生一个有色信号,对该信号作同样的仿真实验。综合研究白色与有色信号情况下算法的时延估计性能,得到时延估值的正确率如表1所示。
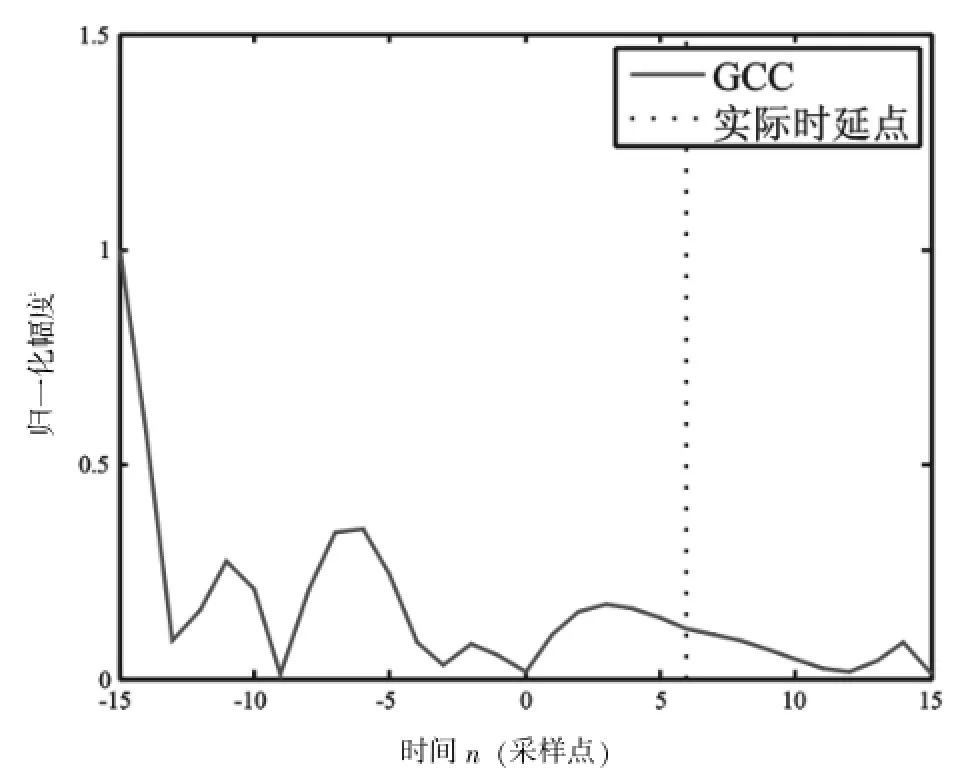
图3 GCC-PHAT估计结果
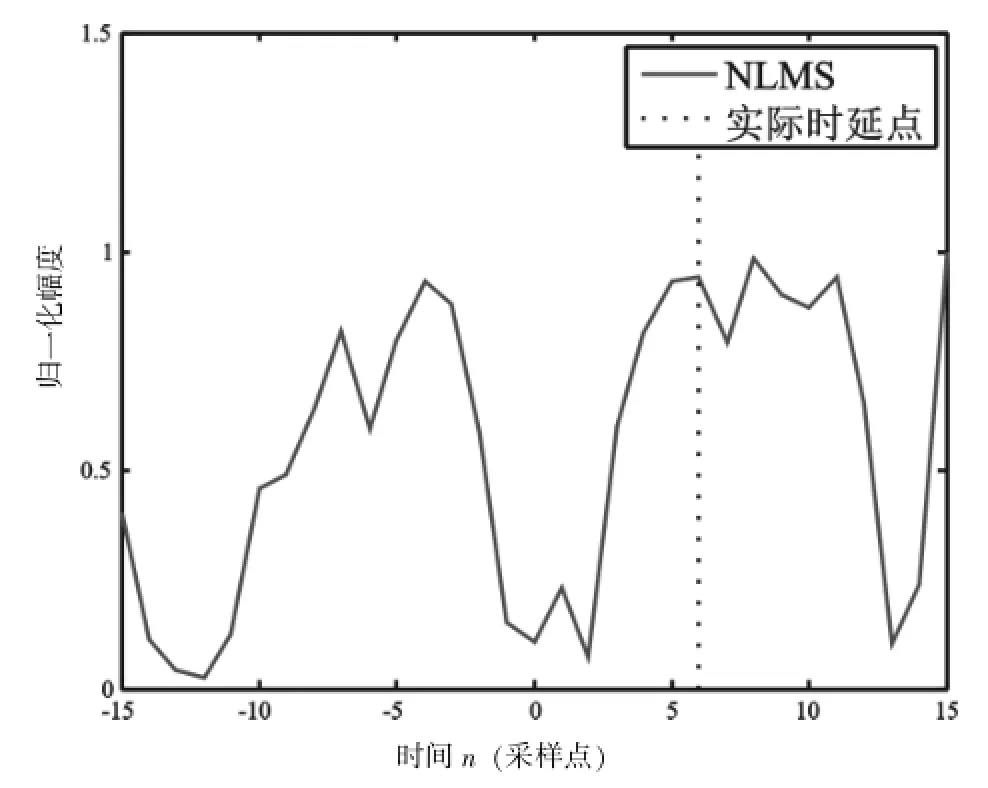
图4 NLMS估计结果
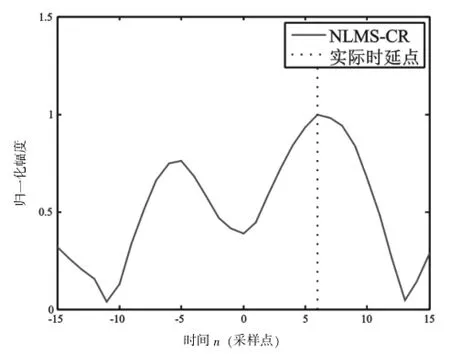
图5 NLMS-CR估计结果

表1 白信号和有色信号时延估计的正确率表
由表1的第二列可以看出,SNR的高低对NLMS-CR的估计性能有很大的影响,SNR较高时,算法性能很好,估计准确率很高;但当SNR下降到25 dB时,估计性能就开始恶化。
比较表1的第二、三列可以看出,当声源信号变为有色信号时,算法的估计性能出现了明显的恶化。这是因为,双麦克风接收信号间的相关性增强了,使得算法迭代过程中可能收敛到局部最优解,而没有收敛到真实的时延位置,以致于产生错误的估计结果,造成算法性能的下降。实际中用到的强相关时间序列可能使算法的性能完全失效,需要我们在后续工作中通过对接收信号的预滤波解进行相关处理来加强算法在实际应用中的鲁棒性。
3 结束语
在强多径环境下,传统的GCC-PHAT、NLMS等时延估计算法已不再适用。为此,本文提出了NLMS-CR算法,并详细地分析了算法的推导与实现过程。仿真结果表明:相比于传统的方法,在强多径环境及较高SNR的条件下,NLMS-CR能保证较高的时延估计准确率,体现了较强的鲁棒性;当SNR小于25 dB时,估计性能开始恶化;同时,由仿真结果还可以看出,采用有色信号时,接收端信号间的相关性增强,算法的性能下降。在实际环境中,我们处理的信号往往是非白的,研究对接收信号的预处理,以便于有效地去除信号间的相关性是我们今后的工作中需要解决的问题。
[1]BENESTY J.Adaptive eigenvalue decomposition algorithm for passive acoustic source localization [J].Acoustical Society of America,2012,107(1):384-391.
[2]许志勇,赵兆.宽间距麦克风阵列实时无模糊多声源被动测向 [J].电子与信息学报,2011,33(9):2056-2061.
[3]KNAPP C H,CARTER G C.The generalized correlation method for estimation of time delay[J].IEEE Transactions on Acoustics,Speech,and Signal Processing,1976,24(4):320-327.
[4]XU H.A least-squares approach to blind channel identification[J].IEEE Transactions on signal processing,2010,43(12):2982–2993.
[5]ALLEN J B,BERKLEY D A.Image method for efficiently simulating small-room acoustics[J].Acoustical Society of America,2013,65(4):943-950.
[6]房玉琢,许志勇.基于自适应盲辨识的麦克风阵列直达波方向估计 [J].南京理工大学学报 (自然科学版),2014,38(2):264-270.
[7]周杨,张天骐,钱文瑞.多径环境下TDDM-BOC信号伪码周期估计 [J].电讯技术,2015,55(6):651-657.
[8]涂鹏,梁玉英,韩壮志.低空目标雷达跟踪中多径效应仿真 [J].计算机仿真,2015,32(8):18-21.
[9]张永棠.一种改进的LZ77无损数据压缩算法设计 [J].佛山科学技术学院学报 (自然科学版),2016,34(1):57-61.
[10]樊昌信,曹丽娜.通信原理 (第7版) [M].北京:国防工业出版社,2012.
[11]高西全.数字信号处理 (第三版) [M].西安:西安电子科技大学出版社,2008.
[12]楼顺天.基于MATLAB7.X的系统分析与设计——信号处理 (第二版) [M].西安:西安电子科技大学出版社,2015.
A Time Delay Estimation Algorithm for Microphone Array in Multipath Environment
ZHANG Yongtang
(Department of Computer Science and Technology,Guangdong Neusoft Institute,Fushan 528225,China)
An algorithm named NLMS-CR,combining the normalized least mean square(NLMS)with the cross relation(CR),is presented to cope with the problem of time delay estimation for microphone arrays in multipath environment.The structure and principle of the algorithm are analyzed in detail, and then it is compared with the traditional phase transform generalized cross-correlation(GCC-PHAT)and NLMS.Simultaneously,the performance of the algorithm is verified under different SNR conditions and in different acoustic source environment. Simulation results show that NLMS-CR is superior to other conventional algorithms in severe multipath environment.And when SNR is high and the correlation of the received signals is low,NLMS-CR has a very high accuracy rate of time delay estimation.
multipath environment;microphone arrays; time delay estimation; algorithm;communication performance
TB 114.3;TP 391.99
:A
:1672-5468(2017)01-0023-04
10.3969/j.issn.1672-5468.2017.01.005
江西省科学技术创新项目 (NO.GJJ12255),广东省普通高校特色创新项目 (NO.2014KTSCX212)资助
2016-06-07
张永棠 (1981-),男,江西南昌人,广东东软学院副教授,硕士,主要从事光通信与无线传感器网络应用方面的教学和研究工作。
猜你喜欢
电子测试(2022年3期)2023-01-14
舰船科学技术(2022年11期)2022-07-15
电子制作(2019年23期)2019-02-23
小学科学(2016年12期)2017-01-06
电脑爱好者(2016年24期)2017-01-05
噪声与振动控制(2016年5期)2016-11-09
系统工程与电子技术(2016年7期)2016-08-21
现代防御技术(2016年1期)2016-06-01
电测与仪表(2016年17期)2016-04-11
做人与处世(2015年19期)2015-09-10