
基于帧同步技术的激光打靶控制系统设计
2017-03-17 00:23王宏松李杰
电子技术与软件工程 2016年16期
关键词:图像处理
王宏松++李杰


摘 要
系统通过图像帧同步技术将红外激光的打靶图像分别标识并实时处理,实现了一种支持多个红外激光同时打靶的控制系统。激光枪在扣动扳机的情况下,利用射频通信同步控制红外激光的发射与停止,在射击目标上形成分时的激光打靶图像。通过高速数字相机采集,利用Field-Programmable Gate Array(FPGA)实时处理的特点,对每一帧有效图像进行同步标识,并通过图像处理技术识别出每一个激光枪对应的打靶射击结果。实践结果表明,该系统能在无线环境下实现多个红外激光同时打靶射击,能适应多人同时的机动射击训练或实景射击游戏场景。
【关键词】红外激光 帧同步 FPGA 射频通信 图像处理
随着激光模拟射击技术的成熟与发展,越来越多的射击游戏场合应用了基于激光的射击打靶系统,如第一人称射击游戏、数字实景游戏等。在现有的激光打靶系统中,识别弹着点的方法通常是:
(1)使用光电二极管阵列接收激光信号从而生成坐标;
(2)使用硅光电池做成激光探测器阵列;
(3)使用光学摄像机拍摄靶面图像。
为了实现多个红外激光同时打靶的控制系统,本文采用图像帧同步技术分别标识红外激光打靶图像。当扣动激光枪之后,红外激光的发射与停止采用射频通信同步控制,之后在屏幕中射击目标上形成分时的打靶图像。系统采用高速数字摄像机采集图像,利用FPGA 对每一帧有效图像同步标识,并识别出每一个激光枪对应的打靶结果。多次实验结果表明,该系统能够实现多个红外激光同时打靶的功能。
1 帧同步控制原理
帧同步控制是以FPGA 为核心,同时连接高速数字相机与红外激光发射模块。具体原理如下:
(1)当高速数字相机产生帧同步信号时,FPGA采集該信号并对其进行同步。
(2)FPGA通过射频信号实时控制红外激光发射模块,允许或禁止其发射红外激光;当在允许发射红外激光的情况下,扣动扳机则可发射出激光。
(3)高速数字相机采集带有激光斑点的图像并传输至FPGA,FPGA根据帧同步信号对图像进行标记,并将标记完成的图像传输至计算机(以下简称PC),PC识别出图像当中的标记和红外激光所形成光斑的坐标信息。
系统框图如图1所示,包括图像采集模块和射击控制模块,其中图像采集模块作为系统核心,通过无线射频同步射击控制模块,实现对多个射击模块的协同控制。
2 系统设计
2.1 射频硬件电路
射频收发模块采用nRF24LE1,这种2.4GHz射频收发器是NORDIC推出的超低功耗无线片上系统解决方案,其内部集成了高性能单片机(与8051指令兼容)、16KB Flash存储器、1KB片上数据存储器,以及为低功耗设计的多种电源模式。
射频控制模块电路包括扳机检测电路、激光器发射控制电路、系统休眠唤醒电路以及激光枪号配置电路。
2.2 FPGA硬件电路
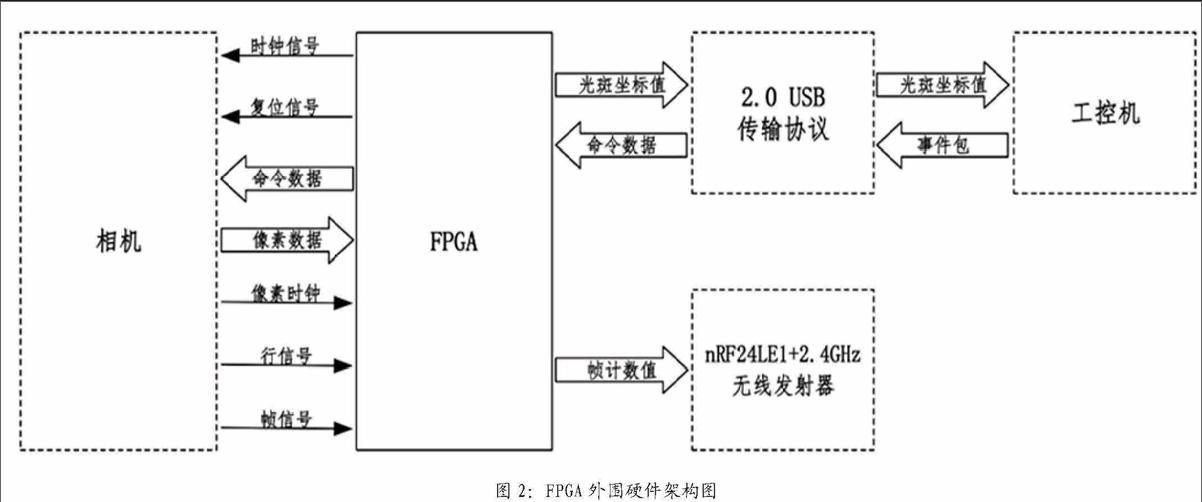
FPGA采用Lattice公司的LCMXO3L-6900C,该芯片具有858个逻辑阵列、6864个逻辑单元,最大用户I/O口数量为206个,最大工作频率可到400MHz。FPGA连接数字相机、射频电路和USB,其外围硬件架构如图2所示。
2.3 FPGA逻辑设计
FPGA的逻辑设计主要包括对相机的帧同步计数和图像处理。帧同步计数包括同步、计数与控制输出。
图像数字处理包括光斑位置识别和位置校正。光斑位置识别用于识别射击位置,利用光斑的亮度远高于背景,采用一定阈值进行二值化并遍历全图的方法即可算出。但由于镜头光学曲率会导致拍到的图片桶形失真,使得识别到的光斑位置与真实位置不相符。因此需要采用位置校正对镜头进行预处理,就是对采集图片变形程度进行预先计算,得到校正函数,然后通过校正函数来处理采集图片,进而得到光斑的真实位置。
计算校正函数需要使用带有等间距白色矩形的标准图片,计算标准图片与采集到的图片之间每个白色矩形位置的变化关系。位置校正的包括图像预处理和仿射变换,其中仿射变换是按区域进行的。
首先查找出所有白色矩形的轮廓,计算每一个轮廓中心的坐标。然后以图片正中的白色矩形为中心,将图片分成4个区域,如图3。每个区域选取采集图与标准图一一对应的三个顶点作为仿射变换的最佳匹配的三个点。最后根据仿射变换原理计算出每个区域中采集图片到标准图片的变换关系,即H矩阵。这样,图像中识别到的光斑都可以通过H矩阵校正为在标准图片中的位置,即真实环境中的射击位置。
3 结语
利用FPGA实时处理的特点,以及结合无线射频控制的方式,可有效解决在激光打靶系统中的多设备协同控制。经过对系统整体性能的试验评估,发现该系统可有效实现多设备在同一高速相机的情况下实现分时同步控制。
参考文献
[1]武丽敏,苏寒松,蔡桂方.数字实景游戏中的智能红外激光枪系统设计与实现[J].电子测量技术,2011,34(05):103-106.
[2]吴喜广.红外激光打靶训练系统的设计[D].兰州大学,2012.
[3]龚厚志,王宏松.基于图像帧分频技术的多激光设备协同控制系统[P].中国:201520714217.9,2015.09.15.
[4]张松,李筠.FPGA的模块化设计方法[J].电子测量与仪器学报,2014,28(05):560-565.
[5]王跃飞,侯亮,刘菲.基于FPGA的汽车CAN网络实时管理系统设计[J].电子测量与仪器学报,2013,27(08):721-728.
[6]刘波,程磊,徐建省,等.基于nRF24LE1的无线胶囊内窥镜医疗机器人[J].华中科技大学学报:自然科学版,2013, 41(z1):293-296.
[7]肖林荣,应时彦,马跃坤,等.2.4GHz射频收发芯片nRF24LE1及其应用[J].信息技术,2009,33(12):13-16.
[8]王琳,毕笃彦,李晓辉,等.基于负修正和对比度拉伸的快速去雾算法[J].计算机应用,2016(04):1106-1110.
[9]申俊琦,胡绳荪,冯胜强.激光视觉焊缝跟踪中图像二值化处理[J].天津大学学报:自然科学与工程技术版,2011, 44(04):308-312.
[10]李培华,肖莉娟.基于Mean Shift的相似性变换和仿射变换目标跟踪算法[J].中国图象图形学报,2011,16(02):258-266.
作者简介
王宏松(1975-),男,重庆市人。现为上海常良智能科技有限公司工程师。专业或研究方向为机器视觉、智能控制。
作者单位
上海常良智能科技有限公司 上海市 201108
猜你喜欢
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
电子测试(2018年6期)2018-05-09
电子测试(2017年11期)2017-12-15
电气化铁道(2016年4期)2016-04-16
河南科技(2014年1期)2014-02-27
