基于“香蕉派”的语音交互式机器人
2017-03-27 22:07刘润暄
电子技术与软件工程 2017年4期


摘 要 本文介绍了一款基于“香蕉派”全语音交互式的智能机器人,它能根据人的语言自动识别“行走”命令或“聊天”内容,并自主行走或与人智能交流。它以Banana PI开源硬件平台作为控制服务器,通过讯飞平台的语音识别和GPIO接口控制外置驱动器,实现语音交互式行走等基本功能。实验证明该机器人能够准确接收指令并做出反应,可靠性较高。并且无任何外设,使用方便。
【关键词】香蕉派 行走机器人 语音交互 Banana Pi
“香蕉派”(Banana Pi,简写为BPI),与“树莓派”类似,但是硬件配置更高、性能更强,对安卓(Android)系统的支持更好。其中,“树莓派”(Raspberry Pi,简写为RPi/RasPi/RPI)是一款基于ARM的微型电脑主板,只有信用卡大小,其系统基于Linux。它以SD/MicroSD卡为内存硬盘,卡片主板周围有多个USB接口和以太网接口,可连接键盘、鼠标和网线,同时拥有视频模拟信号的电视输出接口和HDMI高清视频输出接口,具备所有PC的基本功能。
1 机器人系统简介
本款机器人的特点:
(1)零设置、零辅助,不需要遥控器、手机等任何辅助设备,完全根据语音命令智能响应;
(2)智能化的人机聊天,随着技术的发展即时提升智能化水平。
硬件可基于“树莓派”微型电脑主板,采用3代B型,安装Linux系统,使用C语言进行相应软件开发。也可以基于“香蕉派”微型电脑主板,采用BPI-M3型号,安装Android系统,相应软件开发使用与Java相似度很高的Android开发集成环境。以“香蕉派”为例,描述本机器人的设计开发过程。
2 硬件实现
整个系统分两步进行开发调试环境的搭建,首先是搭建“香蕉派”核心处理系统。其是一个袖珍的主板卡,但是“麻雀虽小,五脏俱全”,除去“香蕉派”主板外,还需准备一套标准通用的USB键盘和鼠标,一个显示器用于开发调试(开发完成后可以拆除)。两块电池用于整个系统供电,最后还需要准备预装了安卓系统的SD卡(对于SD卡要求读写最好在4MB/S以上、容量大于2GB)。
在完成核心处理系统的搭建后,再进行机器人外围系统的搭建,首先利用讯飞平台完成对机器人的“行走控制”或“聊天命令”的语音识别,然后利用“香蕉派”的GPIO接口,控制外置驱动器实现电机的使能、正反转控制。整个系统的硬件框图如图1所示。
2.1 “香蕉派”系统板
“香蕉派”BPI-M3是一款8核高性能单板计算机,兼容“树莓派”,还可以运行Android5.1、Debian linux、Ubuntu linux、Raspberry Pi系统。硬件配置为:1GHz ARM7 8核处理器,2GB LP DDR3内存,千兆以太网口,2个USB接口,支持2K高清视频输出。GPIO兼容Raspberry Pi B+,并能运行其ROM Image。开发板的正反面如图2所示。
2.2 电机驱动板
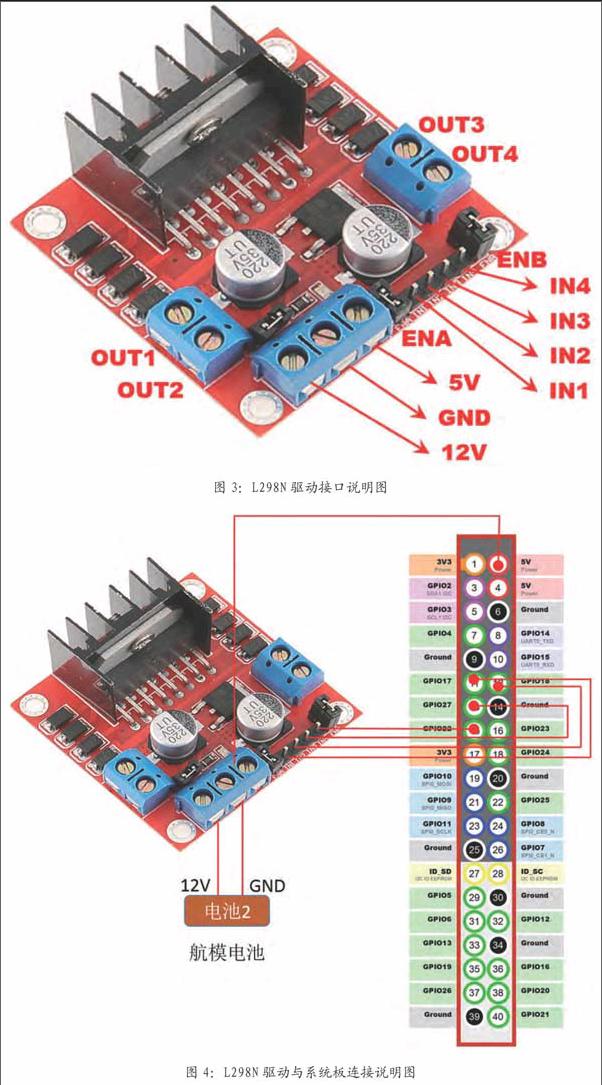
本模块使用L298N作为主驱动芯片,具有驱动能力强,发热量低,抗干扰能力强的特点。其实物如图3所示,其中:
2.2.1 +12V接入口
电压范围:+5V~+35V,使用航模电池供电。
2.2.2 电机接口
OUT1、OUT2为电机A输出;OUT3、OUT4为电机B输出。
2.2.3 IO接口
ENA和ENB分别为A、B电机的使能端,一开始ENA和ENB各自的上下两个针脚是用跳线帽连接起来的,拔掉就可以接线了。IN1~IN4为IO控制输入,与树莓派的GPIO接口相连接。
2.3 系统板与电机驱动板连接
通过“香蕉派”的GPIO接口,控制电机驱动方向及速度,实现小车的前进、后退、变向。把电机接到L298N驱动板上面,然后把电池的正极接到12v接口,负极接到接地接口,5V输入从香蕉派的GPIO2接入。IN1、IN2、IN3、IN4分别接“香蕉派”GPIO的11、12、13、15号接口。如图4所示。
2.4 移动平台
本机器人使用奥松AS-2WD铝合金移动平台,它是2轮驱动,可安装多款直流电机与伺服舵机,并且可以搭载多款控制器、驱动器、传感器和无线射频模块等。其外形如图5所示。
2.5 电池与其它附件
电池供电使用两种:一是10000mAH的充电宝,为“香蕉派”核心处理板供电;二是“格氏ACE 3S 11.1V 2200mAh 30C”无人机航模电池,为电机驱动板供电。“香蕉派”内置麦克,不需要外接,但是无内置喇叭,所以,通过音频输出口外接一个绿色球形音箱。
3 软件实现
本机器人系统的软件设计主要分为两类,分别为实现流程框图如图6所示。
3.1 语音听写
3.2 语音识别
语音识别即语法识别,主要指基于命令词的识别,识别指定关键词组合的词汇,或者固定说法的短句。语法识别分云端识别和本地识别,云端和本地分别采用ABNF和BNF语法格式。本机器人使用了云端识别,实现方法如下。
4 总结
经过各硬件模块组装及调试,本款机器人完成后的外观如图7所示。
经实际使用后,得出本款机器人的智能化程度较高,基础功能已经比较完善。但依然存在诸多问题,系统多方面有待优化升级。
其中,由于香蕉派内置麦克拾音效果较差,影响了语音识别的质量,可选择外带设备提升性能;另外,限于时间原因,后续还需增加红外避障和自动跟随功能,红外避障,就是能够根据语音指令,自主完成避障行走。自动跟随,就是在语音设定好跟随模式后,可智能跟随在人身边,亦步亦趋。基于硬件电路图像处理的视觉导航技术,高智能情感移动机器人等技术是移动机器人发展趋势。
参考文献
[1]王江伟.玩转树莓派Raspberry Pi[M].北京:北京航空航天大学出版社,2013.
[2]丁伟雄,杨定安,宋晓光.步进电机的控制原理及其单片机控制实现[J].煤矿机械,2005(06).
[3]左国玉,刘文举,阮晓钢.声音转换技术的研究与进展[J].电子学报,2004(07).
[4]徐國保,尹怡欣,周美娟.智能移动机器人技术现状及展望[J].机器人技术与应用,2007(02).
作者简介
刘润暄(2001-),男,山东省济南市槐荫区人。山东省实验中学2016级。
作者单位
山东省实验中学 山东省济南市 250001