基于Vortex的火星车爬坡与行进间转向性能分析
2017-04-06 05:35刘兴杰卢玉传
车辆与动力技术 2017年1期
许 鹏, 苏 波, 江 磊, 刘兴杰, 卢玉传
(中国北方车辆研究所,北京 100072)
基于Vortex的火星车爬坡与行进间转向性能分析
许 鹏, 苏 波, 江 磊, 刘兴杰, 卢玉传
(中国北方车辆研究所,北京 100072)
为实现对火星车整体性能的评估,完成对整车简化模型的初步性能分析,采用Vortex多体动力学系统建立整车机构动力学与轮壤力学模型,并对火星车在爬坡、行进间转向两种典型的工况下的车轮挂钩牵引力、车轮沉陷量、车轮滑转率、车轮法向力等性能参数进行了仿真和评估,其结果可为样机的研制提供重要的参考依据.
火星车;轮壤力学;机构动力学;移动性能;Vortex
随着人类对火星的探测,部分探测结果已经发现,火星上存在人类赖以生存的水源,火星在太阳系中所处的位置以及火星上的生存环境与地球极为相似,因此,火星的探测也激起了人类对其探测的更大兴趣.在火星的探测过程中,火星车为火星表面探测的巡视器,是整个火星探测过程中必不可少的工具,利用其对火星表面进行探测,可以获取大量火星表面资料,完成火星的科学探测.而火星土壤的特性将会影响火星车的移动性能,况且火星车在火星表面处于微重力条件,因此,根据火星土壤的特性,从传统经典的轮壤力学模型出发,在低重力模拟环境下,建立火星车轮壤力学模型以及火星车机构多体动力学模型显得非常关键,从而在该环境下完成对火星车移动性能的评估.
目前,国内仿真研究仍处于起步阶段,大部分仿真研究仍然采用通用仿真工具,而且有些仿真仅限于运动学仿真,其中,哈尔滨工业大学RCAMC实验室采用ADAMS动力学仿真软件进行了不同构型的星球车结构优化,并且利用ADAMS接触力约束进行了月球车动力学模型和仿真分析[1-2],并基于此平台实现轮地力学模型的二次开发,实现了在ADAMS平台下地面力学与动力学的联合仿真.
Vortex是实时交互式动力学仿真平台,由加拿大CMLabs公司研发,主要应用于地面车辆、水下机器人、空间探测器等物理系统精确动力学建模与实时仿真的开发,目前国内研究机构虽已研发出自己的星球车仿真平台,但是仿真的速度与动力学的建模不是非常完善[3-6],因此,有必要开发出高速、高精度的动力学仿真平台,同时能够进行动力学算法优化,而后在此平台基础上实现高保真度和实时的火星车移动性能评估.
哈尔滨工业大学和我单位目前已经对月球车基于Vortex平台实现了月球车轮壤力学以及机构动力学仿真分析[7-8],为下一步火星车的建模与动力学分析提供了重要的星球车移动性能评估参考.
本研究基于Vortex平台对火星车机构动力学与轮壤动力学模型进行了仿真分析,得到了车体运动系统与火星土壤之间的交互特性,如轮子挂钩牵引力、车轮沉陷量、车轮滑转率等交互参数,进而为巡视器的设计、控制提供可借鉴的理论参考.
1 火星车轮壤力学模型
基于火星土壤力学特性调研结论,建立轮壤参数力学模型,并建立典型的火星土壤力学参数库;基于多体动力学系统的软土模块,创建具有坡面、平面、障碍等典型工况的火星模拟地形,实现软土特性和不同障碍的有机结合.经火星土壤调研分析,选用Reece力学模型来建立火星土壤承压与剪切模型[9].
在Reece力学模型中,正应力为
(1)
在Reece力学模型中,法向应力为
(2)
式中:θf为接近角;θm为法向最大应力点;r为车轮半径.
剪应力采用Janosi和Hanamoto公式(3)计算.
(3)
式中:τ为剪应力;c为土壤内聚力;φ为内摩擦角;K为剪切模量;j为土壤剪切位移.
Reece模型采用轮下应力积分法计算轮壤作用关系[10],其方程为
(4)
(5)
(6)
式中:W为车轮法向力;D为车轮挂钩牵引力;T为土壤阻力矩;θr为离去角.
车轮侧向力包括车轮底面侧向剪切土壤产生的阻力和车轮侧面土壤挤压产生的推土阻力,其中推土阻力模型以沉陷量作为参量进行估算[11],车轮侧向力计算方程为:

(7)

定义车轮驱动过程中的车轮纵向滑转率s为:
(8)
式中:ω为车轮驱动角速度;v为车体实际平均速度.
2 火星车机构多体动力学模型
依据整车机构的几何尺寸、质量属性、连接刚度等参数,建立火星车的机构多体动力学模型,如图1所示.该模型能够模拟火星车不同工况下的运动状态,真实反映机构各个部件的作用力与运动的关系.
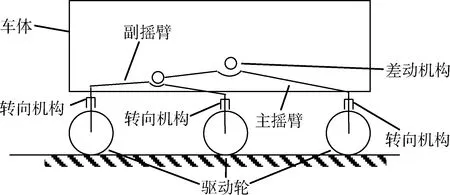
图1 火星车整车模型
该行走系统采用对称式设计,车体左右两侧对称分布摇臂悬架装置,每一个悬架装置连接3个车轮,每个车轮设置转向驱动装置,可实现每个车轮独立转向;车体与悬架采用差动机构的方式连接,其运动约束关系体现为:两侧悬架的角度输入之和为车体俯仰角度的两倍.
考虑到火星车速度非常低,且本体结构设计无弹性装置,因此,在多刚体机构体动力学建模过程中,不必考虑柔性部分,可将车体、车轮等部件视为刚体进行动力学实时解算.
主摇臂与副摇臂连接、主摇臂与转向架连接采用铰接约束,左右悬架和车体之间采用差速器约束,轮地接触过程中,采用Vortex内嵌的轮壤模块产生非完整约束,联合材质、车辆等模块建立车轮和地面的约束关系.
根据杆件质量、质心、转动惯量、角轮半径、宽度等信息,结合杆件间的运动关系,建立连接副约束关系,实现火星车机构与轮壤物理模型与场景模型的建模,建模流程如图2所示.
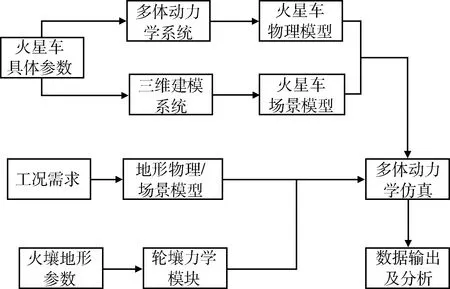
图2 火星车机构与轮壤动力学模型建立流程
整个仿真系统的动力学解算都是通过Vortex实时物理仿真引擎的核心模块的碰撞检测及动力学解算部分完成.
3 火星车移动性能仿真实验分析
3.1 爬坡性能仿真
选取不同坡度的软土斜坡路面作为典型工况进行了仿真实验,如图3所示.通过设定相同的轮子转速与最大输出扭矩,进而对比分析车轮的轮壤作用参数与坡度之间的关系.
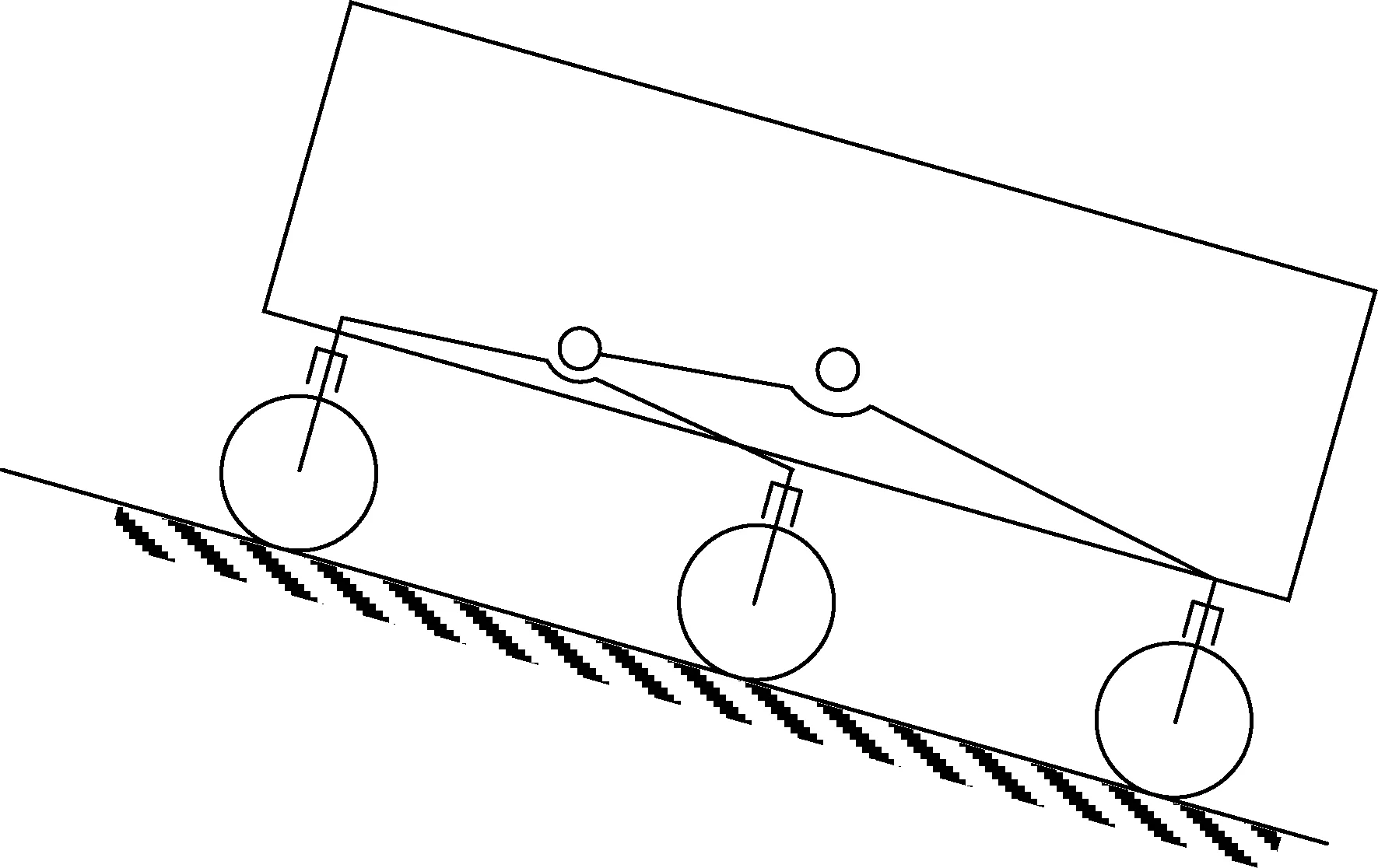
图3 爬坡工况
为清晰分析法向力、挂钩牵引力、滑转率、沉陷量随路面坡度变化的关系,取0°、3°、6°、9°、12°、15°软质坡面分别进行仿真,结果如图4所示.
由图4分析可知:随着坡度的增加,后轮的法向力增加,前轮和中轮的法向力减小,前中后轮的挂钩牵引力增加,滑转率增加,前中后轮在相同的坡度角滑转率接近,沉陷量与法向力的变化趋势相同,后轮增加的较明显.

图4 轮壤作用参数对比分析
3.2 行进间转向性能仿真
在行进间转向工况中测试轮子侧向力、滑转率、沉陷量、挂钩牵引力及土壤阻力矩等参数.在行进间转向过程中,中轮无转向角,前后车轮驱动转向电机,使车轮旋转的线速度垂直于车体转向半径,该转向模式相比差速转向消耗的能量小,原理如图5所示.
图5 行进间转向原理图
按照最小转向半径要求,行进间转向角度关系为:
(9)
式中:L为车体长度;R为转向半径;θ为转向角.
由图6可知:行进间转向(左转)各车轮的挂钩牵引力、滑转率、土壤阻力矩、侧向力有所不同.随着转向角的增加,左前轮与左后轮由于转向角大于右前轮与右后轮,因此左前轮与左后轮的侧向力较大,且增速较快,中轮侧向力接近0;左侧车轮挂钩牵引力增加,右侧车轮挂钩牵引力减小,前轮的挂钩牵引力相对大一些,中轮最小;左侧车轮滑转率增加,右侧车轮滑转率减小,前轮的滑转率相对大一些,中轮最小;左侧车轮受到的土壤阻力矩增加,右侧车轮受到的土壤阻力矩减小,前轮受到的土壤阻力矩相对大一些,中轮最小.
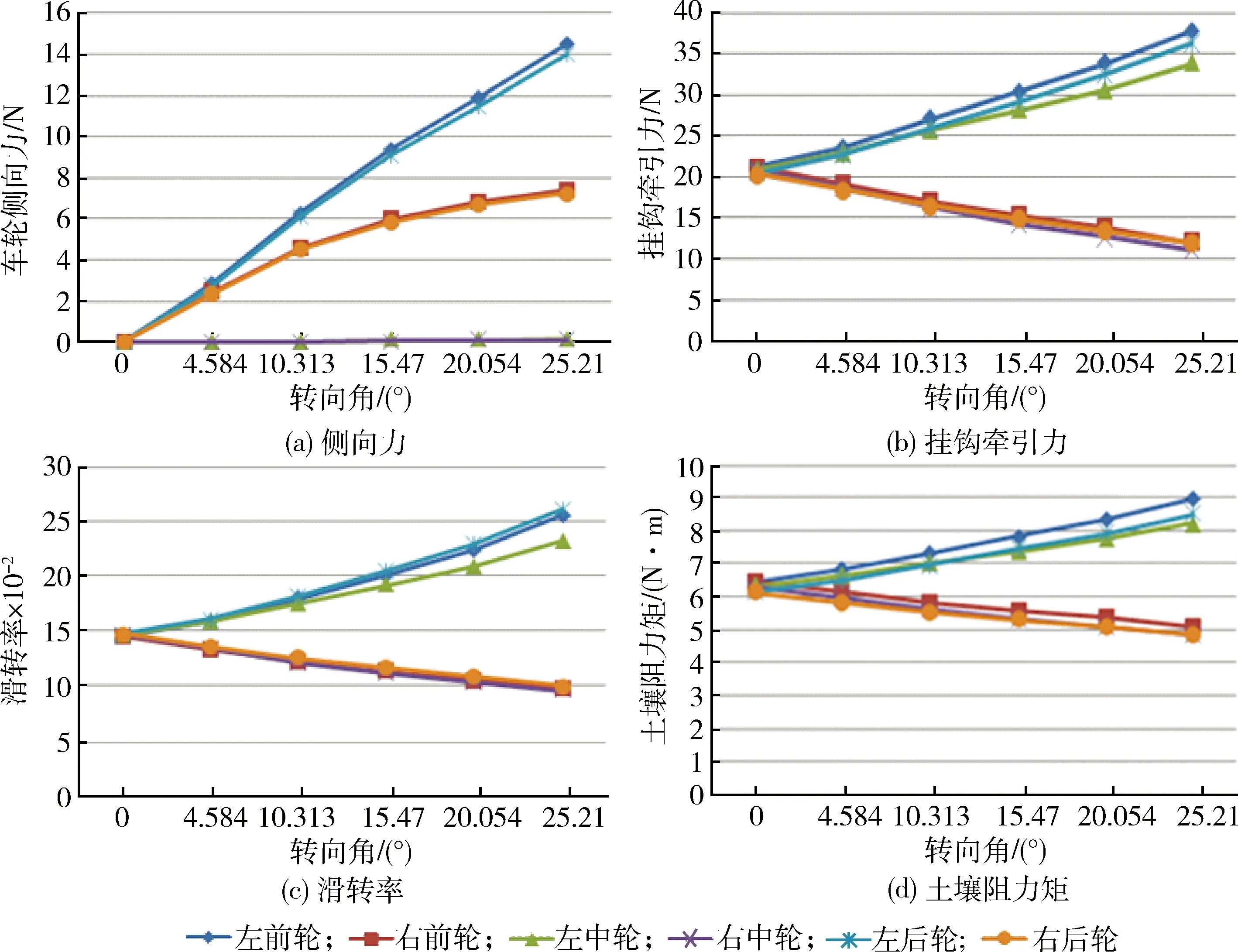
图6 行进间转向性能分析
4 结 论
基于Vortex多体动力学系统建立整车机构动力学与轮壤多体动力学模型,利用该系统高实时性与高准确度的优势,以及对不同轮壤力学作用模型的嵌入与支持,对整车以及轮壤交互搭建三维可视化分析界面,采用Vortex测试了火星车在爬坡、行进间转向两种典型工况下的爬坡性能与行进间转向性能,并对火星车的车轮挂钩牵引力、车轮沉陷量、车轮滑转率、车轮法向力等轮壤作用参数进行不同坡度角与不同转向角下的对比分析,仿真实验与分析结果将为样机的详细设计提供非常重要的参考.
[1] 王 巍,梁 斌. 基于虚拟样机技术的月球机器人运动仿真[J]. 高技术通讯,2002,(2):84-87.
[2] 焦 震. 基于地面力学的月球产业动力学建模与仿真研究[D]. 哈尔滨:哈尔滨工业大学硕士学位论文,2009.
[3] 骆训纪,孙增圻. 月球漫游车仿真系统研究[J]. 系统仿真学报,2002,14(9):1235-1238.
[4] 尚建忠,罗自荣,张新访. 两种轮式月球车悬架方案及其虚拟样机仿真[J]. 中国机械工程,2006,17(1):49-52.
[5] 丁 亮. 星球车轮地相互作用地面力学模型及其应用[D]. 哈尔滨:哈尔滨工业大学硕士学位论文,2009.
[6] 仝 光. 基于ADAMS的月球车仿真平台研究[D]. 吉林:吉林大学硕士学位论文,2007.
[7] 江 磊,郭建娟. 基于Vortex的月球车仿真技术[J]. 农业机械学报,2012,43(z1):352-356
[8] 贾彦辉. 基于Vortex的月球车移动性能评估与实现[D]. 哈尔滨:哈尔滨工业大学硕士学位论文,2010.
[9] Genya Ishigami, Akiko Miwa, Keiji Nagatani, etal. Terramechanics-based Analysis and control for Lunar/Planetary Exploration Robots[D].TOHOKU UNIVERSITY Graduate School of Engineering,2008.
[10]WONG J Y.REECE A R. Prediction of rigid wheel performance based on analysis of soil-wheel, stresses, part I: Performance of driven rigid wheels[J]. Journal of Terramechanics,1967,4(1),81-98.
[11]毛 宁. 六轮摇臂巡视器建模仿真与试验研究[D]. 长春:长春理工大学博士学位论文,2014.
Analysis of Climbing and Steering during Driving Performance forMars Rover Based on Vortex Physics Engine
XU Peng, SU Bo, JIANG Lei, LIU Xing-jie, LU Yu-chuan
(China North Vehicle Research Institute, Beijing 100072,China)
In order to achieve the evaluation of Mars rover overall performance, and complete the preliminary performance analysis of the simplified vehicle model, the vehicle mechanism dynamics and tire-soil mechanics is estabished with Vortex physics engine in this paper. Through the establishment of two kinds of typical working conditions, including climbing and steering during driving, the mobility performance parameters such as the wheel drawbar pull, the wheel sinkage, the wheel slip ratio and the wheel normal force are simulated and evaluated. The results can provide the important reference basis for the development of the prototype.
mars rover; tire-soil mechanics; mechanism dynamics; mobility performance; Vortex
1009-4687(2017)01-0011-04
2017-01-13.
许鹏(1988-),男,工程师,研究方向为智能机器人控制与动力学仿真.
U270.1+1
A
猜你喜欢
军事文摘(2023年2期)2023-02-17
红领巾·探索(2022年11期)2023-01-06
哈尔滨铁道科技(2020年3期)2021-01-18
小哥白尼(神奇星球)(2020年12期)2021-01-18
军事文摘(2020年18期)2020-10-27
小读者(2019年24期)2020-01-19
汽车观察(2019年2期)2019-03-15
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·高一版(2016年4期)2016-11-19
物理与工程(2016年3期)2016-08-31