某无人车转向节优化设计
2017-04-06 05:31冯栋梁刘海涛蔡文斌
车辆与动力技术 2017年1期
冯栋梁, 宁 丹, 赵 宁, 刘海涛, 蔡文斌
(中国北方车辆研究所,北京 100072)
某无人车转向节优化设计
冯栋梁, 宁 丹, 赵 宁, 刘海涛, 蔡文斌
(中国北方车辆研究所,北京 100072)
根据某无人车外定子轮毂电机和双横臂独立悬架的外形尺寸,设计了不同于传统结构的转向节,并采用Adams软件和HyperWorks软件分别进行了动力学计算、刚强度分析和结构的拓扑优化研究,结果表明转向节刚强度小于材料的许用应力,重量轻巧,符合设计要求。
转向节;轮毂电机;双横臂独立悬架;结构设计;刚强度计算;拓扑优化
传统转向节一般会包括转向节臂端和转向节轴端两部分.转向节圆锥轴上一般装有一对圆锥滚子轴承,使转向节与制动器和轮毂相连.圆锥轴端采用螺母紧固轮毂与轴承,使得转向节可以承受来自地面的制动力、纵向滚动阻力和垂向支承力.而转向节臂端则根据悬架形式一般采用球销结构与控制臂以及转向机构相连.某无人车采用外定子轮毂电机驱动,并采用双横臂独立悬架底盘,需要设计出与外定子轮毂电机驱动的电动轮以及双横臂独立悬架相匹配的转向节.新的转向节一方面需要和轮毂电机以及转向节臂通过螺栓紧固连接,另一方面需要和采用球头销连接结构的上下横臂锥孔连接.
首先根据功能需要完成转向节的三维结构设计,然后在动力学软件中完成动力学计算,最后利用有限元软件对初始结构完成有限元建模,刚强度计算以及拓扑优化,最终得到既满足刚强度要求,又兼顾外形且得以轻量化的新结构转向节.
1 转向节的结构设计
该转向节在设计之初,根据外转子轮毂电机的外壳尺寸及连接方式限制了转向节与轮毂电机连接端的尺寸,同时经过双横臂独立悬架硬点坐标优化后确定了该转向节与双横臂连接铰点的具体位置和尺寸,最后根据转向梯形优化得到了转向节与转向节臂的连接结构和具体尺寸,这些尺寸值都是设计约束,相关结构在后期是不能更改的,属于非设计区域.根据需求,该转向节可以分为转向节盘端和转向节臂端两部分.转向节盘端采用一圈螺栓连接轮毂电机外定子壳;转向节臂端采用球销连接上下横臂,采用螺栓连接转向节臂.
初步设计的转向节外形结构如图1所示.
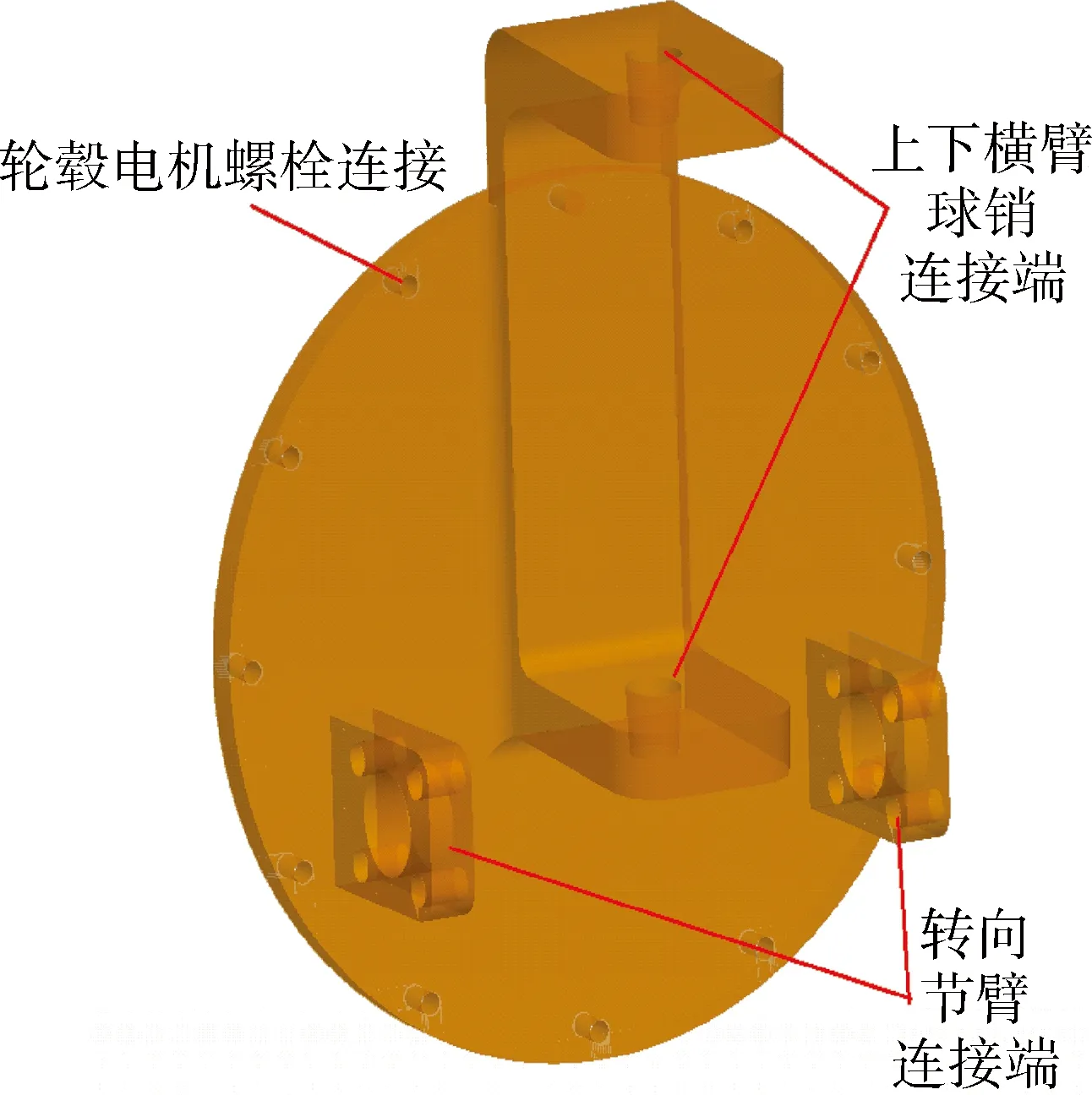
图1 转向节初始结构示意图
对称设计的两个转向节臂连接端是考虑到无人车单轴车轮左右镜像对称结构,使得转向节可以左右互换,在施加载荷约束时只施加在起作用的那一个连接端.
2 转向节的刚强度计算
2.1 网格划分[1]
将转向节的三维模型(见图1)采用IGS格式导入前处理软件HyperMesh[2]中,根据转向节的结构特点进行各种几何清理,圆倒角辨识,分区混合六面体和四面体单元对模型进行网格划分,并对单元质量做了检查.为准确反映转向节和其他结构的连接关系,在接触圆孔、接触圆锥孔和连接螺栓孔周围将所有节点通过刚性单元(RBE2)连接在一起.最终建立好的有限元模型如图2所示.
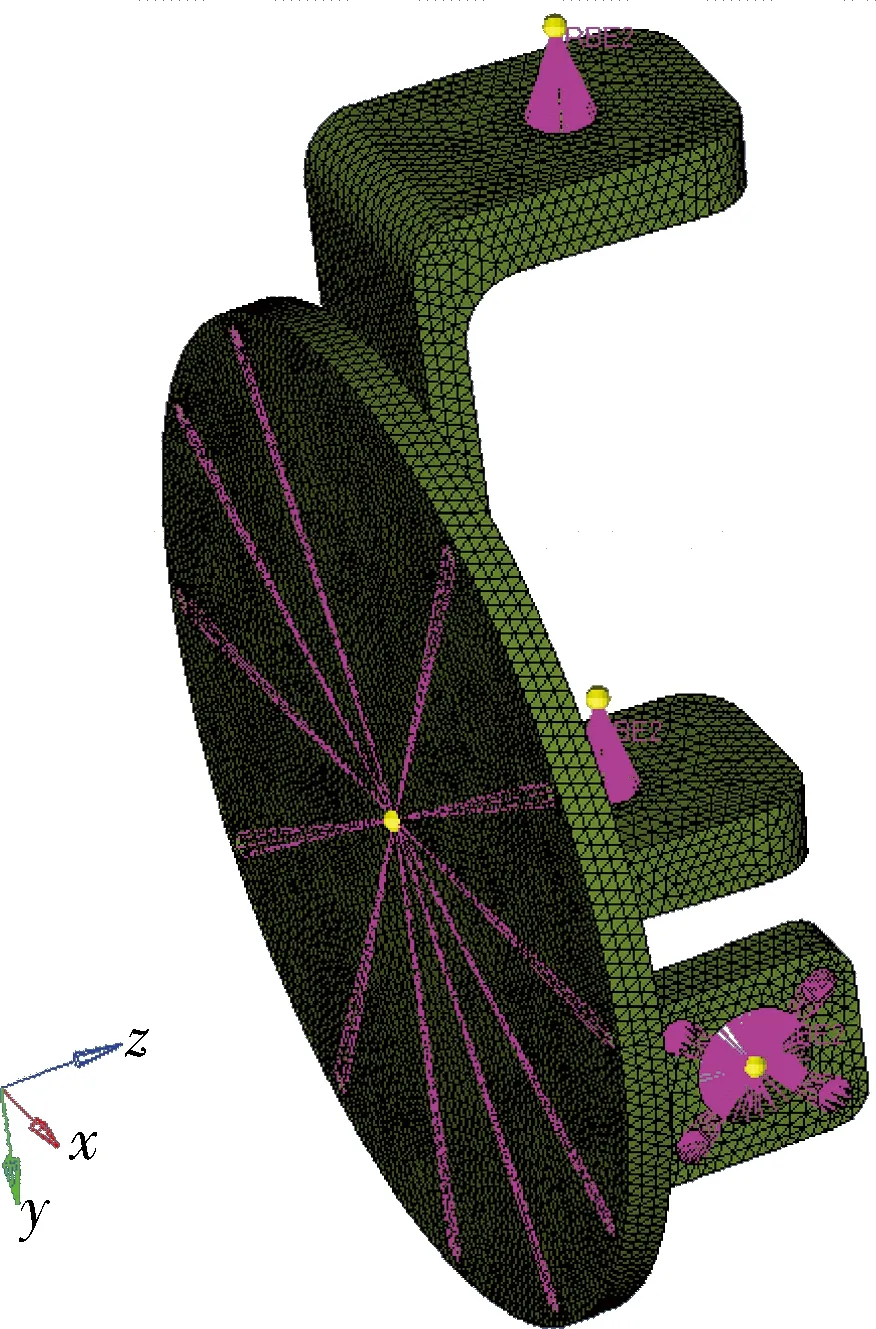
图2 转向节有限元模型示意图
2.2 定义材料
采用传统转向节常用的球墨铸铁材料QT500-7.该材料属于塑性材料,在进行刚强度计算时,以屈服极限σs作为计算使用的极限应力.具体参数如表1所示.

表1 材料特性参数
2.3 施加载荷及边界条件
根据该无人车行驶时车轮的受力状况,对现有转向节结构按照3种危险工况进行计算分析,即:紧急制动工况、侧滑工况、和越过不平路面工况.将转向节盘与轮毂电机定子外壳连接的12个螺栓孔处施加6自由度全约束.
在Adams 动力学软件中对整车进行3种极限工况受力计算,得到转向节上下横臂球销点和转向节臂连接点在x、y和z方向的受力大小,如表2~表4所示.
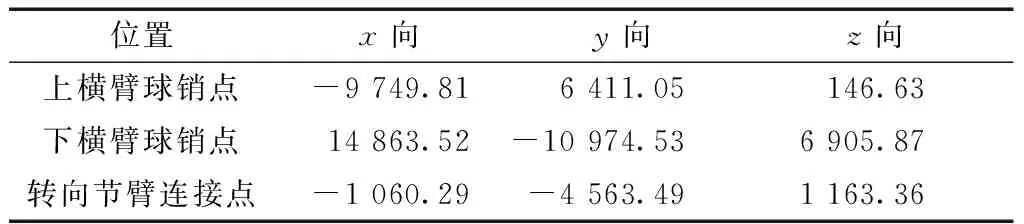
表2 紧急制动工况下各点受力 N

表3 侧滑工况下各点受力 N
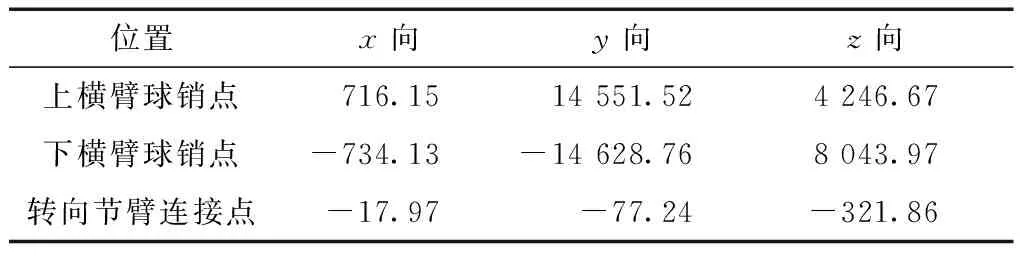
表4 越过不平路面工况下各点受力 N
2.4 转向节刚强度计算分析[2]
采用Radioss软件,对转向节3种极限工况下的刚强度进行计算,其相应的应力应变结果见图3~图8。图3和图4为紧急制动工况应力应变计算结果.图5和图6为侧滑工况下应力应变计算结果.图7和图8为越过不平路面工况下应力应变计算结果.

图3 紧急制动工况应力图
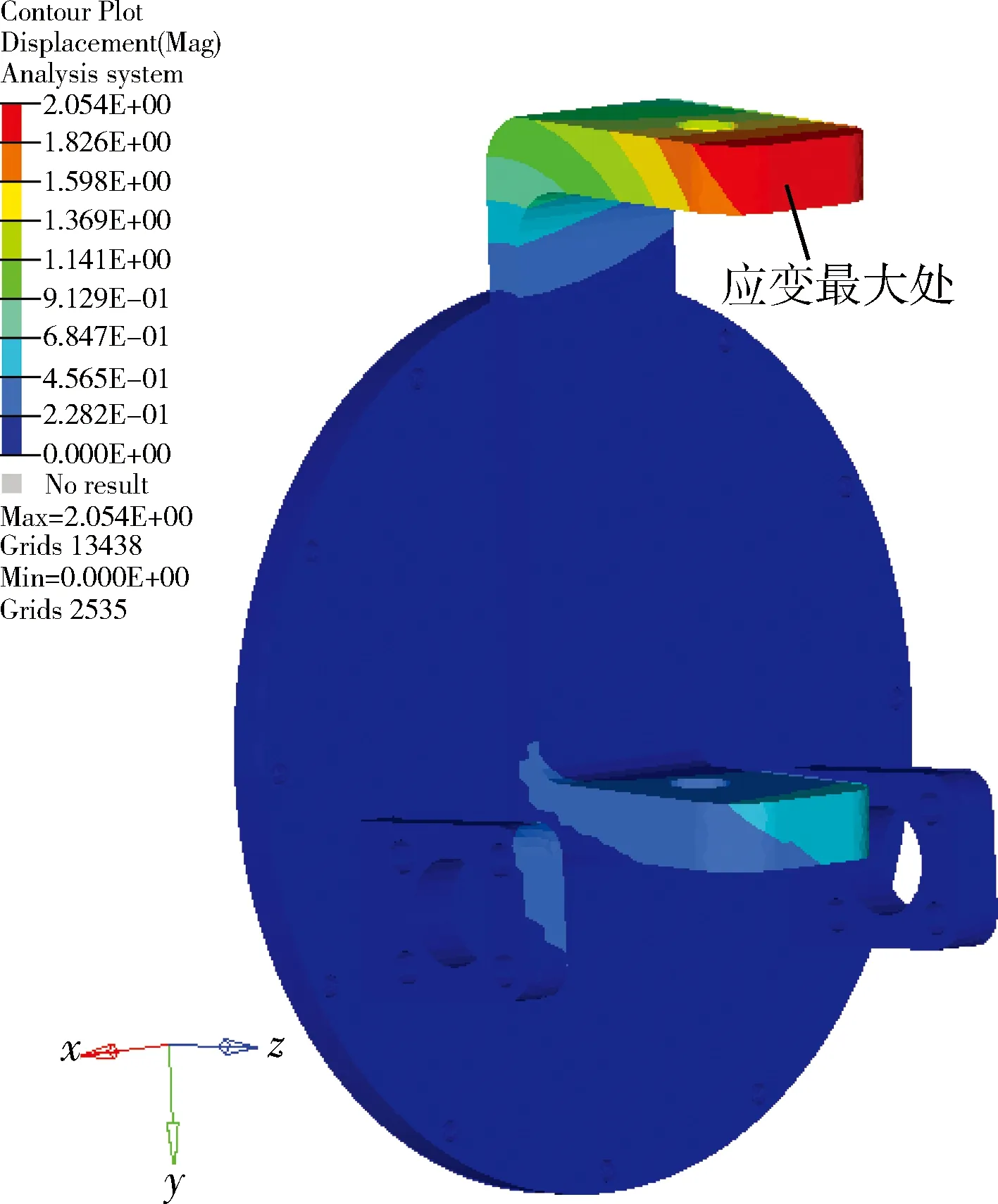
图4 紧急制动工况变形图
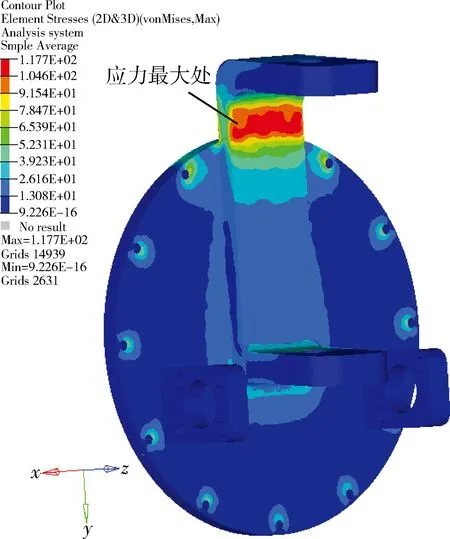
图5 侧滑工况应力图
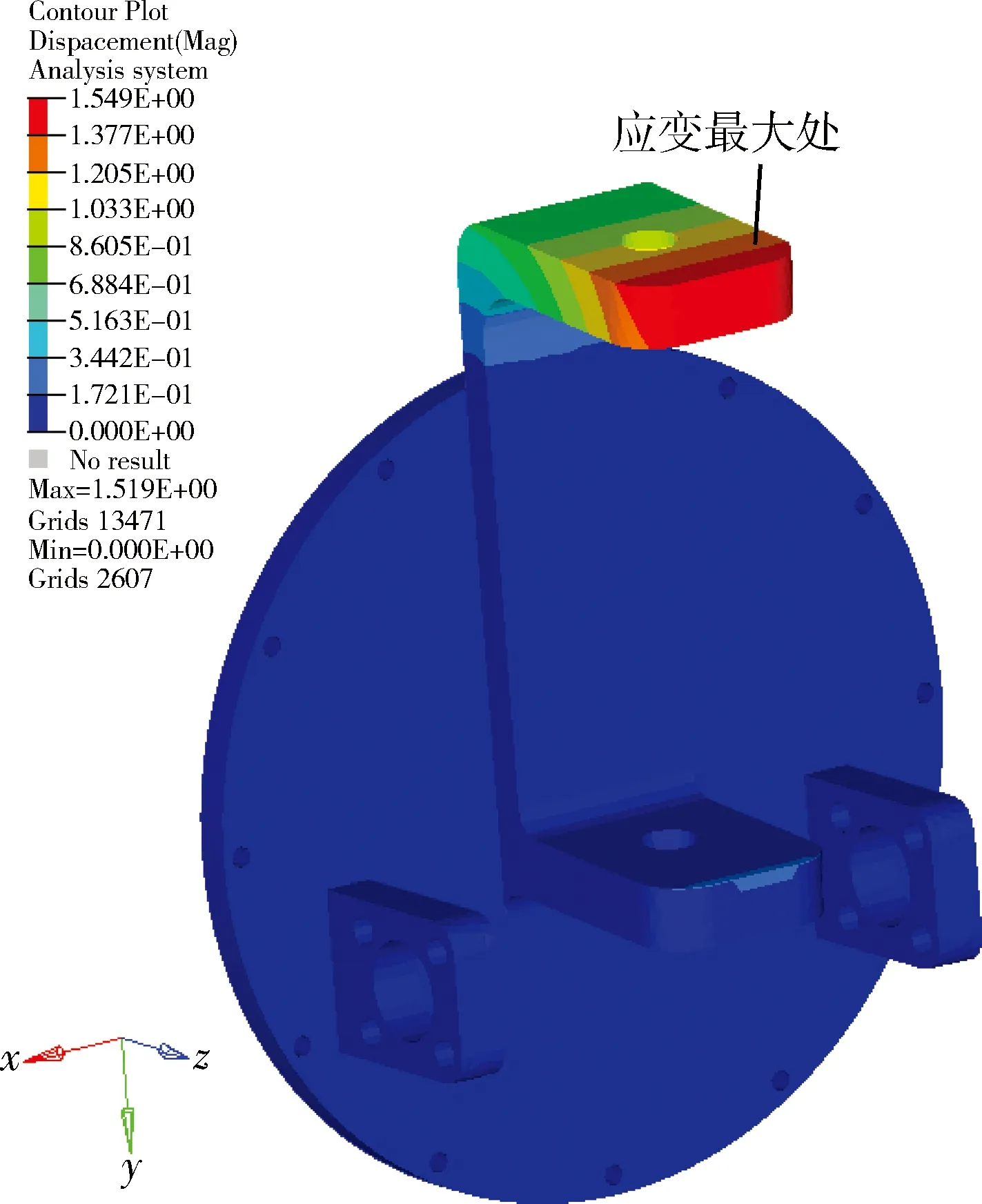
图6 侧滑工况变形图

图7 越过不平路面工况应力图

图8 越过不平路面工况变形图
3种极限工况下的最大应力和最大应变计算结果如表5所示.

表5 3种工况下的刚强度计算结果列表
根据计算结果可知,转向节在越过不平路面工况下的最大应力为294 MPa,制动工况下的最大应力为291 MPa,均小于材料的屈服强度320 MPa,应力最大值点处都集中在上球铰与转向盘转角处,应变最大值点处都出现在上横臂与转向节连接的球销支撑平面端,可见这两处的结构需要加强,以减小应力集中和过大的应变.从计算结果还可看出,转向节盘端大部分区域应力和应变都较小,属于可以减重去除的材料,具体需要如何处理则需要进行拓扑优化.
3 转向节的拓扑优化计算
拓扑优化是一种数学方法[3],是结构优化中重要的技术.通过拓扑优化可以在给定的设计空间内找到最佳的材料分布或传力路径,从而使结构在满足各种性能的条件下达到重量最轻.在运用OptiStruct软件分析时,计算机能够针对每个单元的材料特性和给定的约束,改变材料分布,以优化用户定义的设计目标.
结构拓扑优化的基本思想是将寻找结构的最优拓扑问题转化为在给定的设计区域内最优材料分布问题.通过产品拓扑优化,根据载荷条件和边界条件确定一个比较合理的结构形式.该结构形式不涉及具体的尺寸设计,只提供了一个设计方案,设计人员结合加工可行性和工艺分析来决定最终的具体设计.
3.1 拓扑优化定义
拓扑优化过程主要包括三部分:1)定义设计及非设计区域;2)定义优化参数;3)进行拓扑优化.
首先定义设计及非设计区域,在转向节有限元模型中,将与轮毂电机和转向节臂的螺栓连接处,以及和上下横臂球销的锥孔连接区域定义为非设计区域,其余部分定义为设计区域,然后定义优化响应.根据前面对转向节的刚强度有限元分析得知,该转向节应变相对过大,所以设计时应主要考虑变形量的影响.最后定义优化响应的体积参数最小化为目标函数.
3.2 拓扑优化分析
定义完拓扑优化的各个参数后,运行OptiStruct软件,在经过13次迭代后,得到0.015密度阀值下的转向节拓扑优化结果,如图9所示.
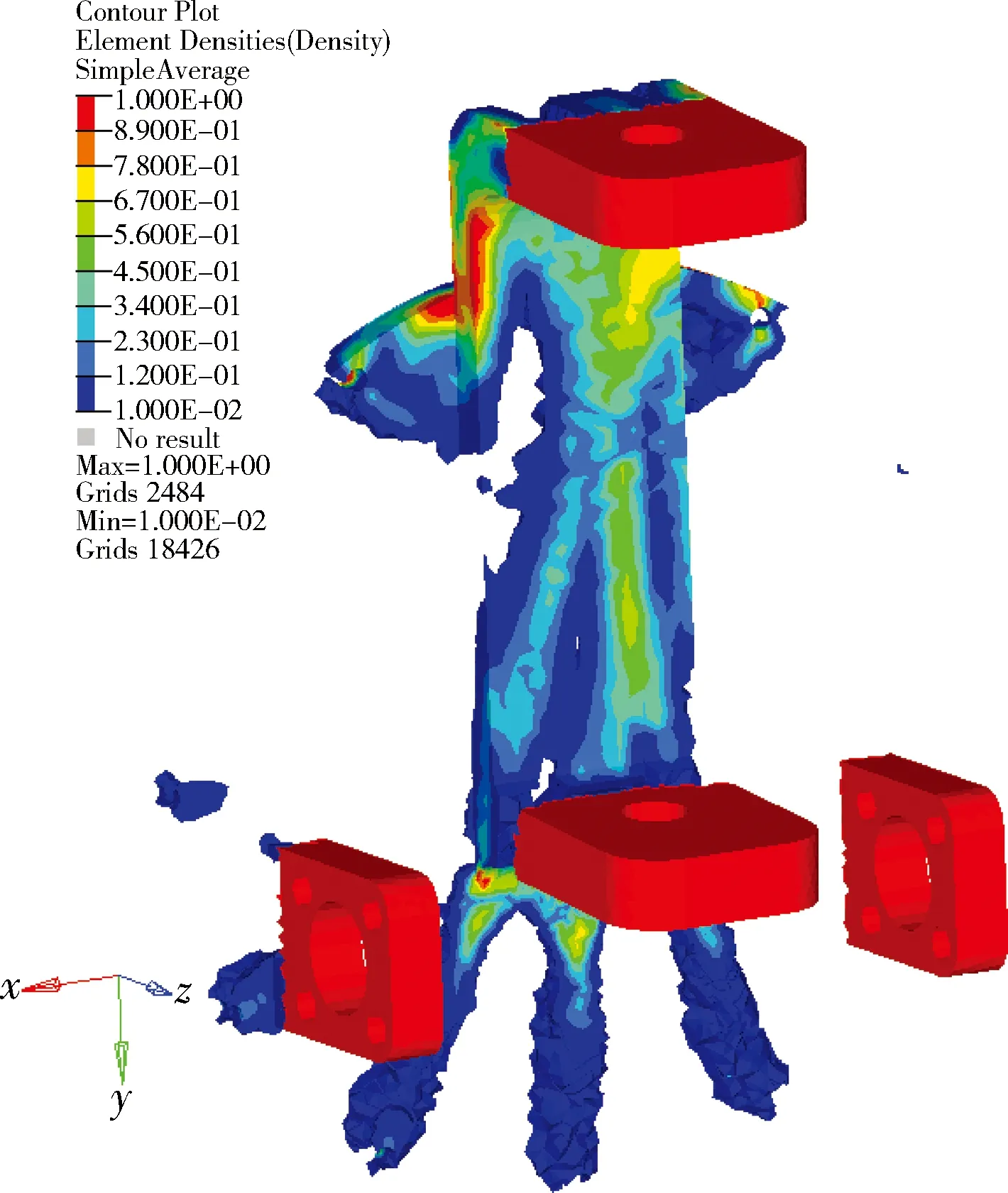
图9 0.015密度阀值时转向节拓扑优化示意图
从图9可以看出,深色部分为转向节不可缺少结构连接部分,除此以外其他剩余部分为0.015密度阀值时保留下来的部分,可见转向连接的大盘其实大部分都是不需要的,但是转向节与轮毂电机连接的螺栓孔是需要保留的结构,而其他部分则可以进行拓扑优化.
3.3 转向节最终结构设计
根据刚强度计算结果与拓扑优化分析结果,最终确定转向节的结构如图10所示.该结构在转向节盘端的盘面上进行了大块结构的减重,只留下一些轮辐结构的加强筋.在不考虑左右互换时,可以舍弃前期保留的转向节臂对称连接端设计,使得转向节重量进一步减轻.
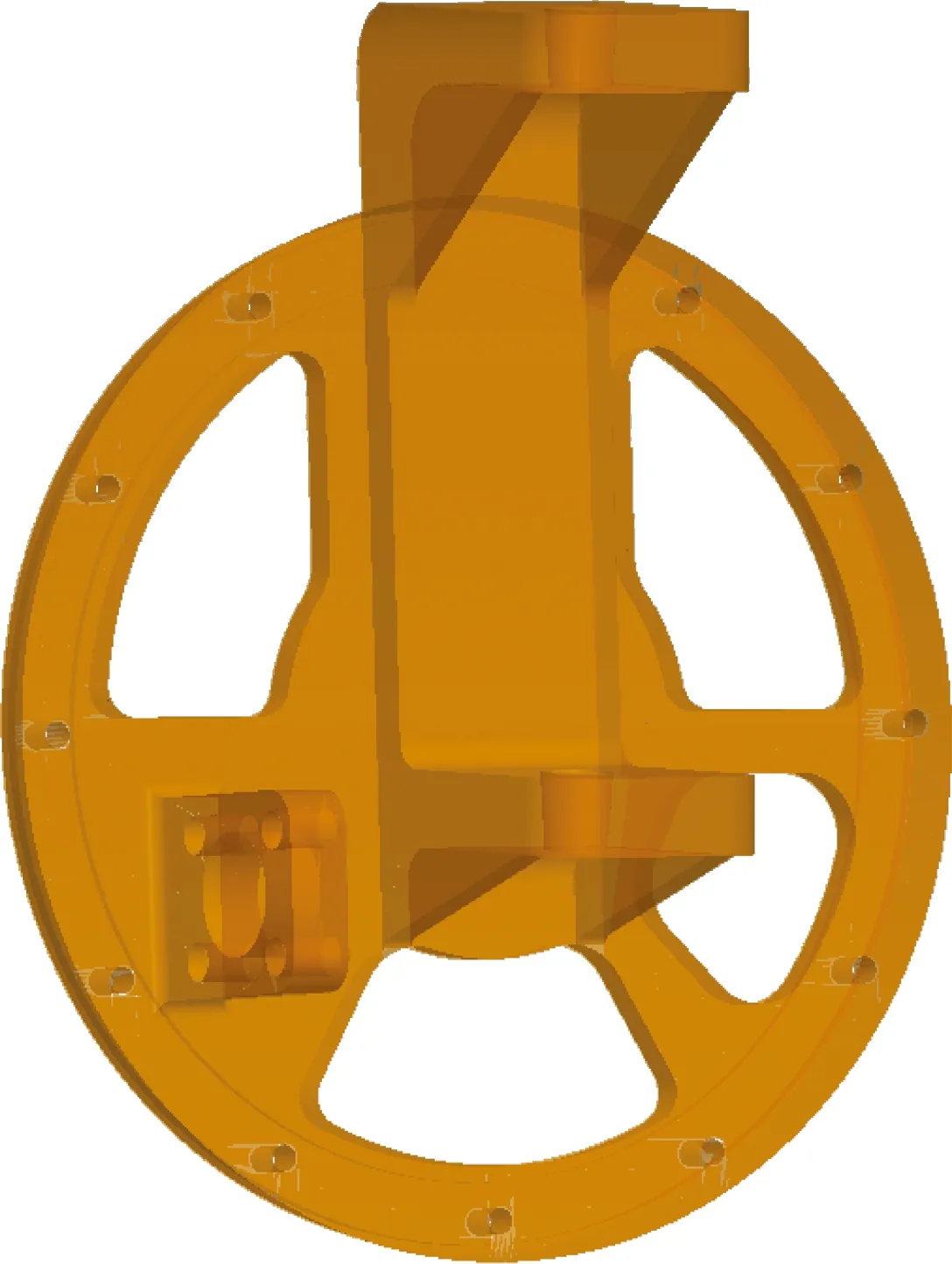
图10 转向节最终结构示意图
为了验证拓扑优化后的结构在3种工况下的应力仍在材料的屈服强度内,再次建立新结构的有限元模型并进行强度校核,其结果见图11~图17.计算结果表明转向节最终结构满足刚强度要求,强度均小于材料屈服强度320 MPa,应变也没有变大.
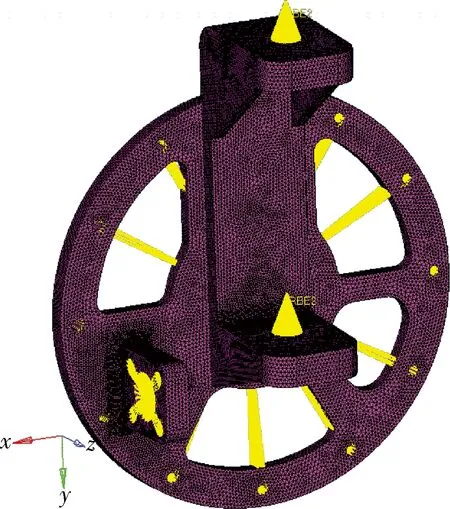
图11 转向节最终结构有限元模型示意图
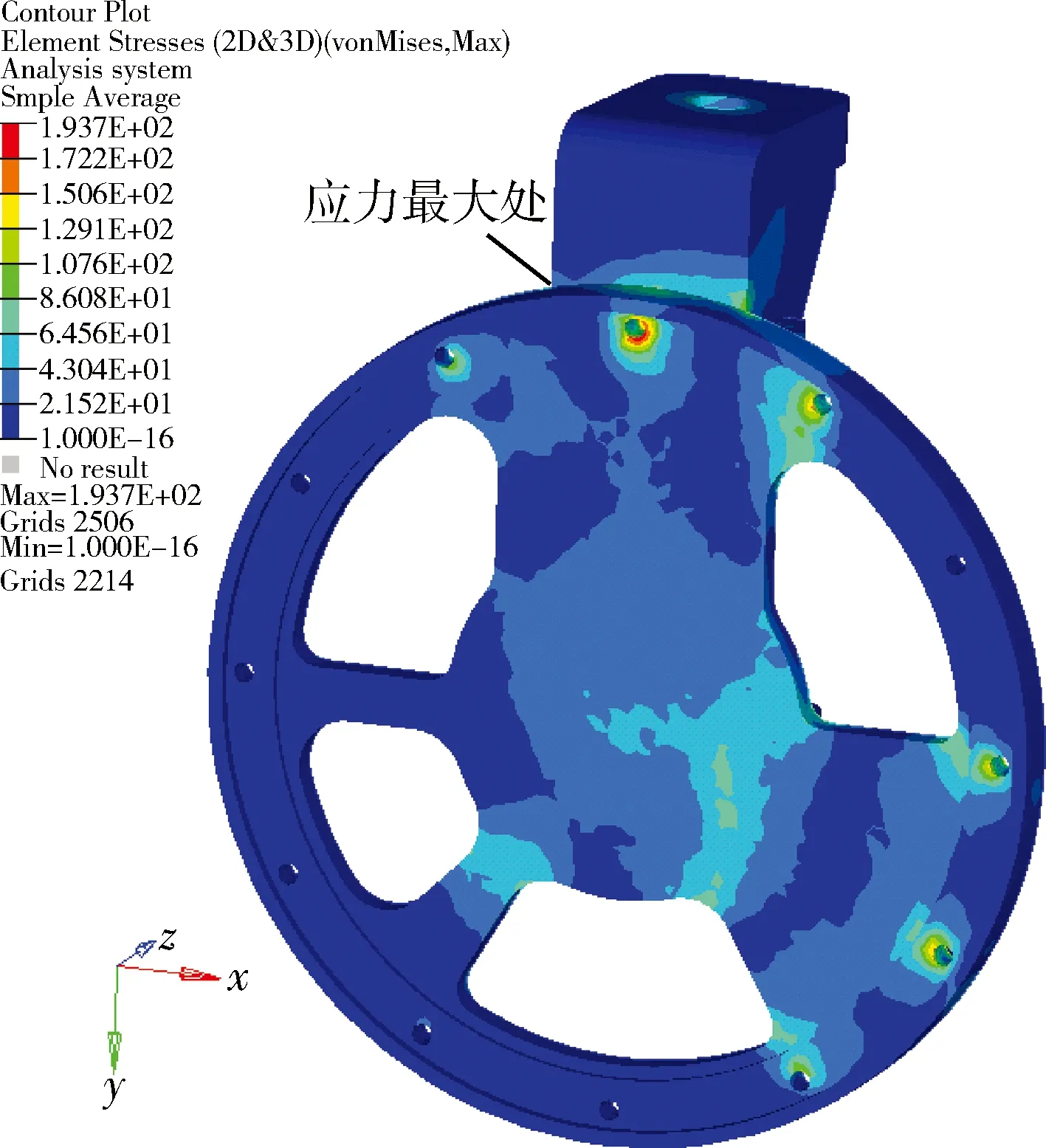
图12 紧急制动工况应力图
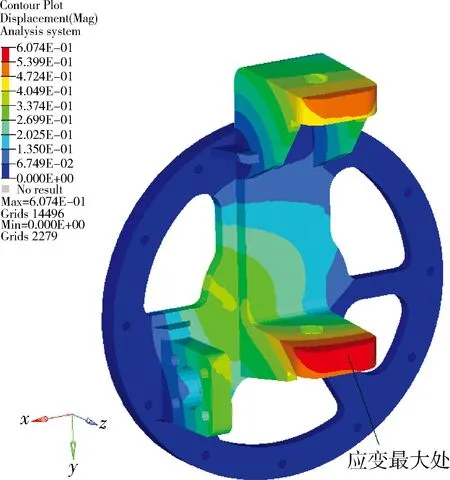
图13 紧急制动工况变形图

图14 侧滑工况应力图
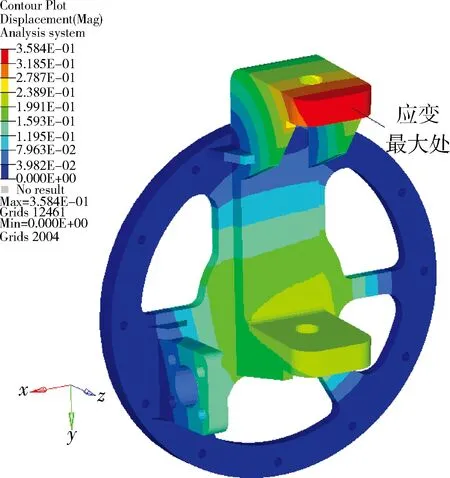
图15 侧滑工况变形图
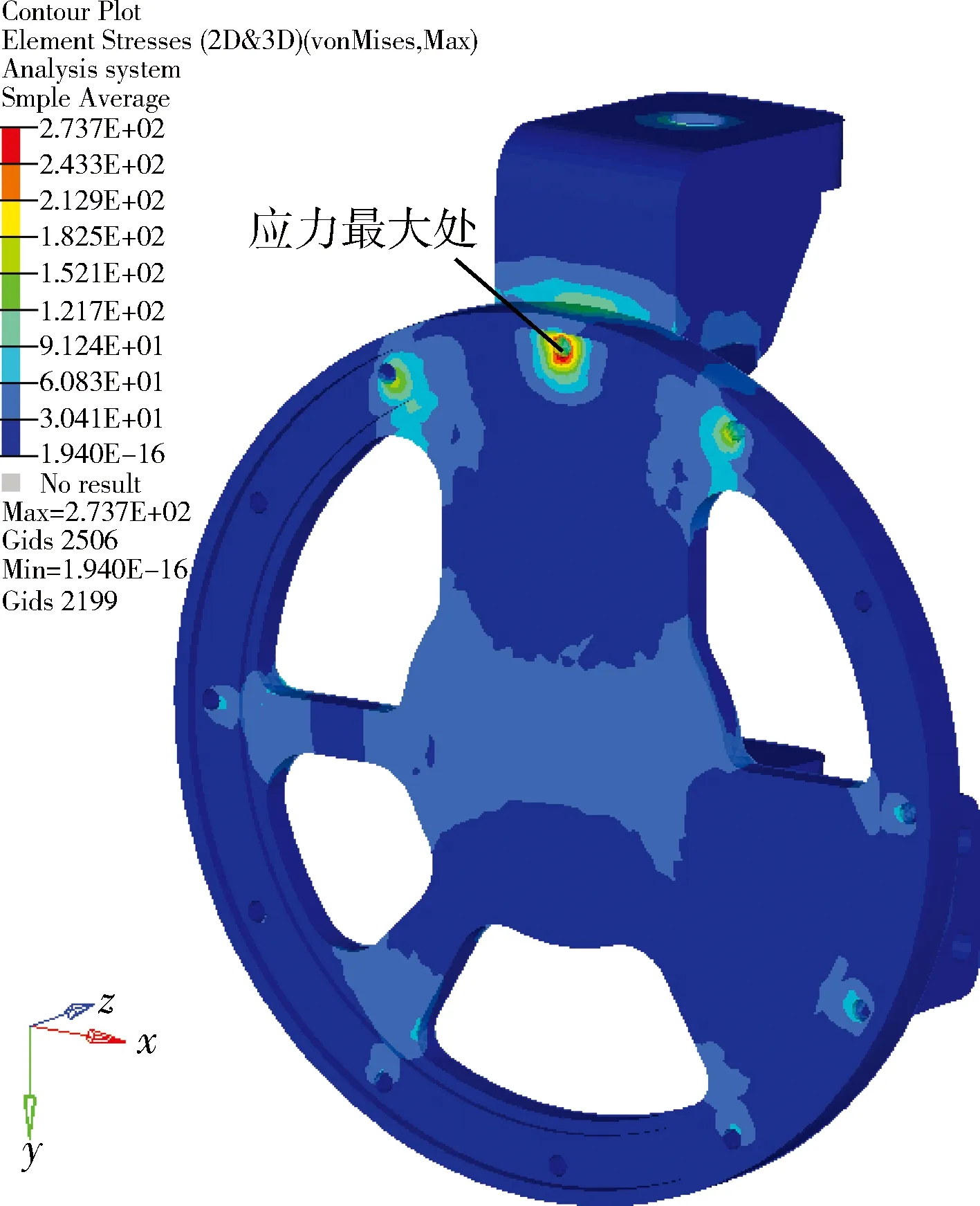
图16 越过不平路面工况应力图

图17 越过不平路面工况变形图
优化后的转向节在3种极限工况下的最大应力和最大应变计算结果如表6所示.

表6 3种工况下的刚强度计算结果列表
从表6可以看出:拓扑优化后的转向节最大应变都比结构优化前有了较大的减小,应力也都在材料允许的屈服强度320 MPa以内,优化后的转向节满足了设计要求.
4 结 论
通过对某无人车的转向节的结构设计、动力学分析、有限元刚强度计算以及拓扑优化,结果表明,新设计的转向节既满足性能需求,又实现了轻量化,满足了设计需求.
[1] 张 琦,郑松林,金晓春,等. 汽车后转向节轻量化设计及试验验证[J]. 现代制造工程,2014,(4):42-47.
[2] 王钰栋,金 磊,洪清泉. HyperMesh&HyperView应用技巧与高级实例[M]. 北京:机械工业出版社,2014:104-153.
[3] 洪清泉,赵 康,张 攀. OptiStruct&HyperStudy理论基础与工程应用[M]. 北京:机械工业出版社,2013:55-70.
Optimal Design of Knuckle for an Unmanned Vehicle
FENG Dong-liang, NING Dan, ZHAO Ning, LIU Hai-tao, CAI Wen-bin
(China North Vehicle Research Institute,Beijing 100072,China)
According to the overall dimension of the outside stator hub motor and the double wishbone independent suspension, knuckle is designed differently from the traditional structure. Adams software and HyperWorks software are used for the dynamic calculation, the stiffness analysis and topology optimization. The results show that the stiffness of knuckle is less than the allowable stress of the material and light weight, which meet the design requirements.
knuckle;hub motor;double wishbone suspension;structure design;rigid strength calculation;topological optimization
1009-4687(2017)01-0059-06
2016-12-25.
冯栋梁(1983-),男,工程师,研究方向为车辆工程。.
U463.46
A
猜你喜欢
城市道桥与防洪(2022年8期)2022-09-15
汽车实用技术(2022年10期)2022-06-09
汽车实用技术(2022年5期)2022-04-02
环境技术(2022年1期)2022-03-21
上海涂料(2021年5期)2022-01-15
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
汽车文摘(2017年4期)2017-12-07
制造技术与机床(2017年10期)2017-11-28
制造业自动化(2017年2期)2017-03-20