
基于混合算法的仿生机器鱼路径规划
2017-04-18 15:18汪科
价值工程 2017年10期
关键词:避障
汪科
摘要:针对人工势场法在仿生机器鱼路径规划应用中障碍物目标附近不可达问题(GNRON),采用人工势场与模糊逻辑相结合的算法,预设一个模糊控制器,在机器鱼陷入陷阱区域时,切换至以之匹配的模糊控制算法,使机器鱼快速摆脱陷阱区域,向目标点移动。通过实验,实现了机器鱼在全局环境下的避障,证明了该方法的有效性。
Abstract: Aiming at the problem of GNRON in the application of artificial potential field in robot fish path planning, a fuzzy controller is proposed by combining the artificial potential field and fuzzy logic. When the robot fish falls into the trap area, switch to the matching fuzzy control algorithm, so that the robot fish can quickly get rid of the trap area and move to the target point. Through the experiment, the obstacle avoidance of the robot fish in the global environment is realized, which proves the effectiveness of the method.
关键词:人工势场法;模糊逻辑;仿生机器鱼;避障
Key words: artificial potential field method;fuzzy logic;robot fish;obstacle avoidance
中图分类号:TP242 文献标识码:A 文章編号:1006-4311(2017)10-0087-02
0 引言
当前,随着各类机器人技术的不断发展和广泛应用,机器人技术引起了越来越多的高校与研究机构的重视。水下仿生机器鱼由于兼具灵活性和使用性,引起了国内外多数学者的重视。但是由于水下运动环境的复杂性以及水流条件的不可预知性导致出现机器鱼研究的瓶颈。
由于人工市场法具有实时性强、算法简洁且便于数学描述等优点,因此在陆地机器人路径规划中占据主导地位。但传统的人工势场法仍然存在有局部最小值、遇障碍物易导致系统不稳定、动态环境下易产生震荡等各类缺陷。不少学者针对人工势场法存在的缺陷,进行了大量的研究工作,主要从三个方面着手[1]:一是在原有势场函数中补充一些其它新的影响因素,如速度、角度等[2];二是通过构造其它形式的场,设计新的势场函数[3,4];三是通过将多种智能算法与搜索算法相结合[5,6]。综合来说,实际当中障碍分布存在有不确定性,与其为了避免局部极小值发生做大量的计算,不如在发生局部极小值时,做出适当处理。
本文首先以人工势场法作为机器鱼路径规划的基础,然后根据机器鱼、目标点及障碍物三者之间的实时位置关系设计了一个模糊控制器,及时引导机器鱼避开障碍物到达目标区域。最后通过实验表明,仿生机器鱼能够成功避开障碍物,以迅速、快捷、平滑的路径到达目标区域。
1 人工势场法的基本原理
人工势场法的本质思想是将现场环境假象成一个势力场U,U由两部分组成:一个是斥力场Urep,驱动机器人远离障碍物;另一个是引力场Uatt, 驱动机器人靠近目标点,机器人在其中运动受到斥力场Urep, 与引力场Uatt,的合力控制。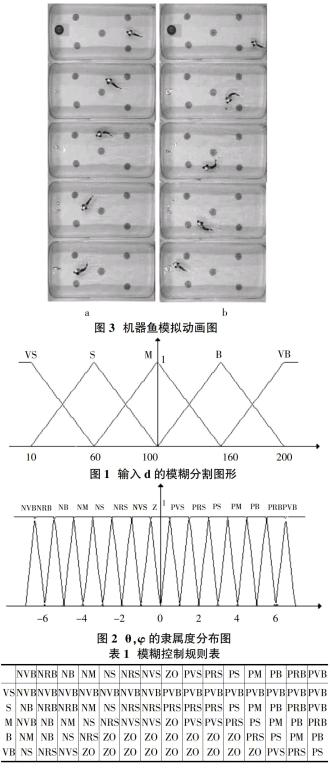
机器鱼从起点开始在合力作用下沿着既定路径朝目标点进发,此合力在全局范围内为机器鱼导航。
2 人工势场法的缺陷及改进
传统的人工势场法虽然算法简洁,物理意义明确,但是实际应用的时候有其局限性。主要表现为当移动机器人向目标点逼近时,随着引力减小而斥力增大,此时可能会出现合成势场最小值不趋向目标点或者在目标点和障碍物前抖动甚至无法前行等情况。
基于模糊逻辑的路径规划算法的主要优点在于能够在难以建立障碍物位置信息精确数学模型来描述的情况下进行局部路径规划。但如果完全采用模糊逻辑进行路径规划,不仅所需计算量较大,在路径出现突变时,会妨碍对智能体的控制。因此将模糊逻辑和人工势场两种规划算法进行组合,充分发挥人工势场算法简单、控制精确以及模糊逻辑法适应环境能力强的特点。
3 模糊控制器的设计
将机器鱼与障碍物之间的距离d及障碍物相对于机器鱼与目标方向之间的夹角θ作为模糊控制器的二维输入。首先,将输入变量d以VS,S,M,B,VB五种语言变量进行模糊化,θ(φ)的语言变量定义为NVB,NRB,NB,NM,NS,NRS,NVS,Z,PVS,PRS,PS,PM,PB,PRB,PVB。以全局为坐标,当目标点位于障碍物右 (左)侧时,夹角θ为正 (负),机器鱼则右 (左)转为正(负)。输入变量d的模糊分割图形如图1所示。
研究对象机器鱼的运动形式主要以直行,左转弯和右转弯为主。因此,定义左转和右转为七种模糊语言变量。同时,θ、φ选取相同的梯形隶属函数。其隶属度函数分布见图2。
为了保证机器鱼能够有效避障可以设定:当目标点位于障碍物的右 (左)侧时,则机器鱼向右 (左)转,转角大小由障碍物大小及障碍物与机器鱼的间距决定。若障碍物位于机器鱼正前方时,默认机器鱼右转。
根据实验经验,归纳模糊控制规则[8]得表1。
4 实验及分析
在微小型机器鱼实验台上对所述算法进行验证,假想将机器鱼理想化为一条直线,忽略在实际避障过程中的一些误差,总体效果令人满意,能顺利避开障碍物,到达指定位置。
如图3(a),(b)所示,实验环境为一水池长2000mm, 宽1200mm。图中黑色球型为目标点区域,灰色圆柱为障碍物。通过两次实验取得了相同的结果。序列图(a)中从上至下,机器鱼所受合力指引它越过中间障碍物的上方,最终到达目标区域。序列图(b)中,机器鱼从中间障碍物的下方绕过障碍物到达目标区域。实验结果表明,基于混合算法的仿生机器鱼控制效果良好,机器鱼能够以最佳途径到达目标区域。
5 结束语
本设计首先采用传统人工势场法,对一类仿生机器鱼的行进路径进行初步规划,针对人工势场法的局限性,即障碍物目标附近不可达问题(GNRON),设计了二维模糊控制器,在机器鱼陷入陷阱区域时,使用模糊控制算法为机器鱼导航。最后设置一个避障实验,验证了该算法的有效性,且路径平滑。
参考文献:
[1]张捍东,王丽华,岑豫皖.基于势场的移动机器人自主导航研究综述[J].自动化与仪表,2007(4):8-12.
[2]覃柯,孙茂相,孙昌志.动態环境下基于改进人工势场法的机器人运动规划[J].沈阳工业大学学报,2004,26(5):568-571.
[3]Ge S S, Cui Y J. New potential functions for mobile robot path planning[J]. IEEE Transactions on Robotics and Automation, 2010, 16(5): 615-620.
[4]Prahlad Vadakkepat, Kay Chen Tan, Wang Ming-Liang. Evolutionary artificial potential fields and their application in real time robot path[C]//Proceedings of the 2000 Congress on Evolutionary Computation. 2010: 256-263.
[5]A.K. Kulatunga, D.K. Liu, G. Dissanayake, and S.B. Siyambalapitiya. Ant colony optimization based simultaneous task allocation and path planning of autonomous vehicles[C]. IEEE Conference on Cybernetics and Intelligent System, volume 1, pages 1-6, 2015.
[6]Jean Bosco,Xinhan and Min.Fuzzy motion planning among dynamic obstacles using artificial potential fields for robot manipulators[J]. Robotics and Autonomous Systems.July 2013, (32): 6l-72.
[7]Khatib O. Real-time obstacle avoidance for manipulators and mobile roboots[J]. The International Journal of Robotics Research,2014, 5(1): 90-98.
猜你喜欢
农业科技与装备(2016年11期)2017-04-22
现代电子技术(2017年5期)2017-04-01
科学与财富(2016年34期)2017-03-23
科技创新与应用(2016年34期)2016-12-23
