采用快速动网格技术的时空同步流固耦合算法
2017-04-21 09:29仲继泽徐自力
振动工程学报 2017年1期
仲继泽 徐自力
摘要:为了减少流固耦合计算时间,发展了一种时空同步流固耦合算法。在每一次耦合迭代中,首先求解RANS(Reynolds Averaged Navier Stokes)方程,然后采用本课题组所提出的快速动网格技术计算结构及流场网格节点位移,并更新流场网格,实现流场与结构振动的空间同步求解。在每一时间步,通过多次耦合迭代,使流场计算收敛,同时保证结构振动计算的收敛,实现流场与结构振动的时间同步求解。采用该算法对弹性梁流固耦合振动及Wing 445.6颤振问题进行了研究,计算结果与文献中的结果一致。与已有文献的时间同步算法相比,此算法可以减少计算时间81.2%。
关键词:流固耦合;动网格;时间同步;空间同步;时空同步
中图分类号:0327;TBl23
文献标志码:A
文章编号:1004-4523(2017)01-0041-08
DOI:10.16385/j.cnki.issn.1004-4523.2017.01.006
引言
结构与流体之问的耦合现象在交通运输、船舶、能源、建筑、机械制造、航天航空等工程领域普遍存在,有时会造成结构的损坏。1940年美国TacomaNarrows bridge在风中发生流固耦合振动,最终坍塌。2006年,某轴流压气机叶片发生流固耦合振动,诱发高周疲劳,造成叶片断裂。2010年,美国洛克希德一马丁公司的验证机在飞行实验中,机翼与空气之问的流固耦合效应诱发的颤振使机翼折断。因此,流固耦合已成为研究人员重点关注的问题。
基于CFD/CSD的紧耦合方法可以考虑结构与流场的相互影响,贴近物理实际。因此,研究结构的流固耦合问题通常采用基于CFD/CSD的紧耦合方法。李田采用基于CFD/CSD的流固耦合方法研究了横风下高速列车运行稳定性问题。毛国栋研究了流固耦合效应对建筑中膜结构风振响应的影响。王征基于CFD/CSD技术计算了压气机叶片流固耦合响应并预测了其颤振边界。流固耦合计算主要分为流场分析、结构振动分析及流场网格更新等3个部分。为了考虑边界变动对流场的影响,需要在ALE格式下采用动网格算法更新流场网格节点坐标。目前所发展的动网格算法主要有弹簧法、弹性体方法、温度体方法。及径向基函数方法。上述动网格方法的网格变形效率普遍偏低,采用这些方法更新流场网格的计算时间占流固耦合计算总时问的比重较大。时间同步流固耦合算法包含2个层次的迭代过程,即外部迭代(流场分析和结构振动分析之间的迭代)、流场分析的内部迭代。首先通过内部迭代求解流场,然后采用外部迭代耦合流场和结构振动。流体域和结构分别属于2个不同的空间区域。可以认为,上述时间同步算法在空间域上是不同步的。这种空间不同步的算法在流场计算收敛之后更新流场网格,可以减少流场网格更新的次数,从而减少流固耦合计算的总时间。
本课题组针对当前动网格方法网格变形效率低的问题,在弹性体方法的基础上发展了一种快速动网格技术,能够显著提高网格变形效率。将该快速动网格技术用于时间同步流固耦合研究后发现,对流场多次迭代求解会增加流场计算时间,使得流固耦合计算的总时间增加。本文在时间同步流固耦合算法的基础上,结合本课题组所提出的快速动网格技术,发展了一种时空同步流固耦合算法。采用该算法对弹性梁流固耦合振动问题及Wing445.6颤振进行了研究,计算得到的弹性梁振动的位移时间曲线与已有文献的结果一致,计算得到的Wing445.6颤振边界也与实验数据吻合,说明了本文算法的正确性。
1.时空同步流固耦合算法
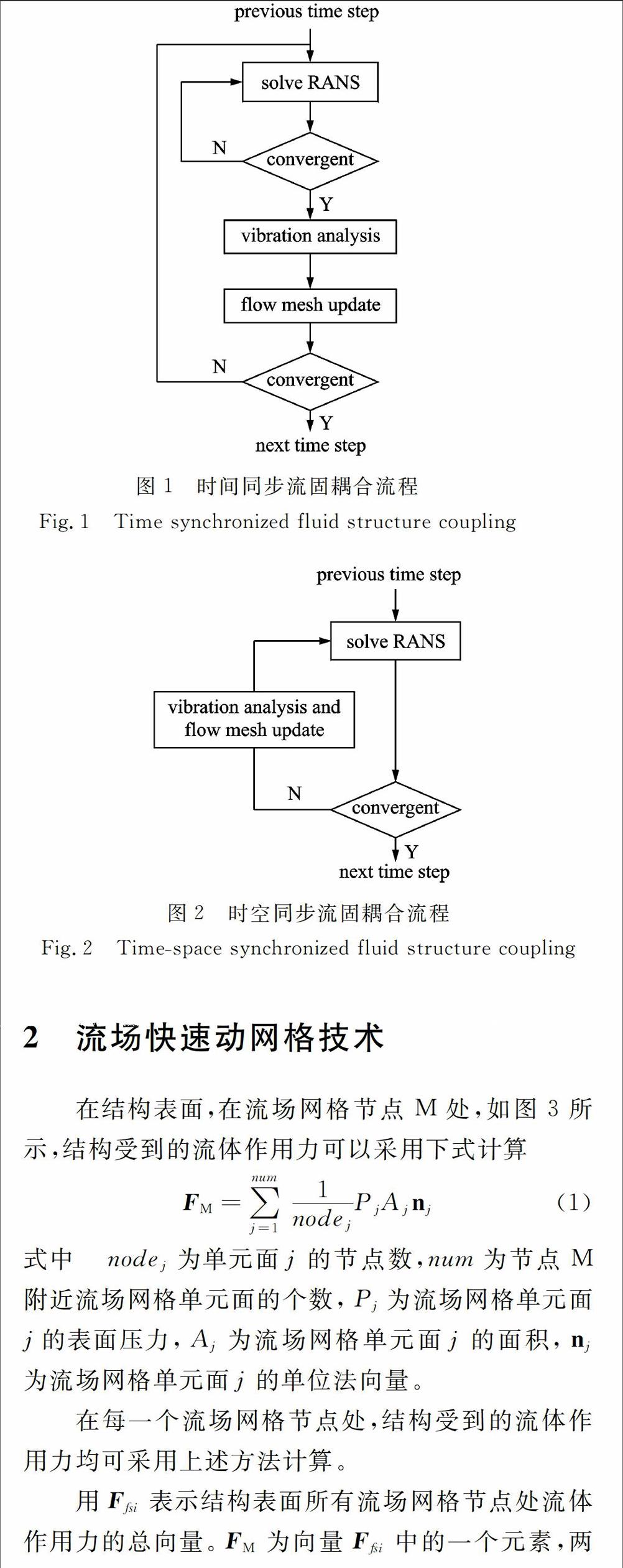
流固耦合计算主要分为流场分析、结构振动分析及流场网格更新等3个部分。在问同步流固耦合算法中,每一时间步,都首先进行流场分析,通过迭代求解RANS(Reynolds Averaged NavierStokes)方程得到收敛的流场结果,然后分析结构振动,最后采用动网格算法更新流场网格,重复上述过程直到结构振动计算收敛,具体流程如图1所示。在每一时间步末,流场分析和结构振动分析同时满足收敛,即实现了流场和结构振动的时间同步求解。
通常情况下,在时间同步流固耦合计算的每一时间步,往往在流场多次(10次左右)迭代达到收敛之后进行一次流场网格更新。此时,网格变形的时问基本上比流场收敛的计算时间小一个量级。但是,每一次的网格变形的时间与流场计算收敛的过程中的每一次的迭代计算的时间基本相等。如果网格更新次数过多,就会导致网格变形的总时间赶上甚至超过流场计算的总时间。所以,在时间同步流固耦合算法中,通过流场计算收敛之后更新流场网格可以减少网格更新次数,进而减少流固耦合计算的总时间。然而,当采用本课题组所提出的快速动网格技术更新流场网格时,流场网格更新所需的计算时间与流场分析所需计算时间相比可以忽略。通过减少流场网格更新次数不但不能减少流固耦合计算的总时间,相反流场的多次迭代求解会增加流场计算时问,从而使得流固耦合计算的总时间增加。在流固耦合计算中,每一时间步都需要流场与结构振动的多次迭代求解,只要每一时间步的最后几次迭代的结果是收敛的,就能保证流固耦合计算的收敛性。所以没有必要在每一时间步的每一次迭代计算中,都通过多次迭代使流场计算收敛。本文在流场迭代求解的过程中分析结构振动并更新流场网格,并在时间步末使流场计算满足收敛,具体流程如图2所示,将该方法称为时空间步流固耦合算法。可以看出,该方法只包含1个层次的迭代,即流场分析和结构振动分析之问的迭代,流场计算收敛的同时结构振动计算也会收敛。在每一个流固耦合迭代步中,首先求解RANS方程(不迭代),然后采用本課题组所提出的快速动网格技术计算结构及流场网格节点位移,并更新流场网格。作者称之为流场与结构振动的空间同步求解。通过多次耦合迭代,使流场计算收敛,同时保证结构振动计算的收敛,完成一个时间步的计算。称之为流场与结构振动的时间同步求解。本文的方法可以减少流固耦合计算中流场求解的迭代次数,减少流场分析所需的计算时间,从而减少流固耦合计算的总时间。
考虑前4阶模态,采用本文的算法对弹性梁进行流固耦合分析,得到弹性梁振动的模态位移时间曲线如图6所示。随时间的推进,第1阶振动的模态位移幅值逐渐减小,即第1阶模态的振动是稳定的,不会发生颤振。第2阶模态的振动的模态位移幅值不随时间变化,即第2阶模态的振动处于颤振临界点。即该弹性梁的颤振为第2阶弯曲颤振。第3,4阶振动的模态位移幅值随着时间的推进逐渐减小,即第3,4阶模态的振动也是稳定的。与第3阶振动相比,第4阶振动的模态位移幅值衰减的更快。可以说,振动模态的阶数越高,频率越高,发生颤振的可能性就越低。
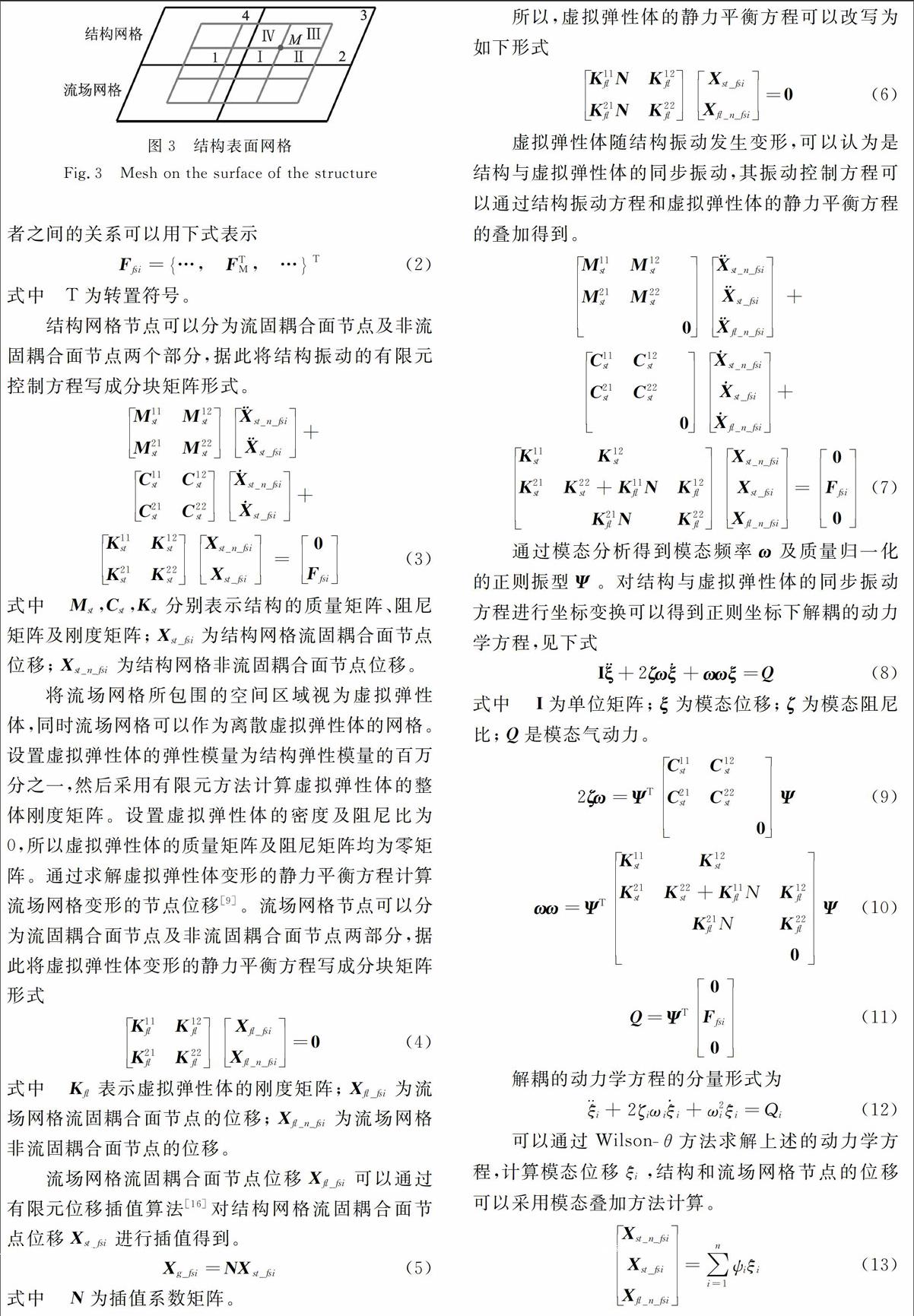
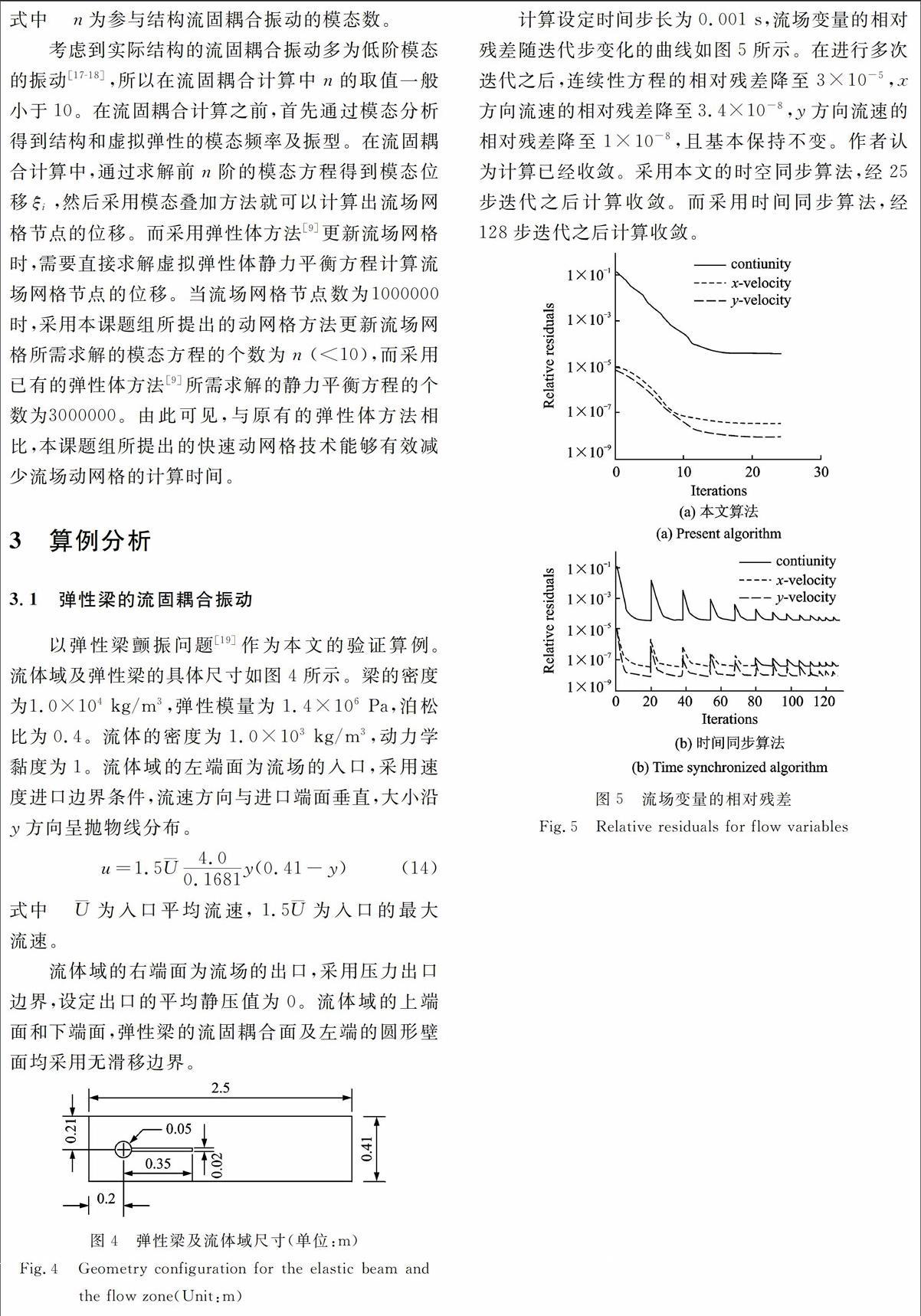
计算得到弹性梁右端中点的位移时间曲线如图7所示,其中x方向位移的变化周期是y方向位移变化周期的2倍。可以看出,本文的计算结果与文献[19]的结果是吻合的,说明了本文算法的正确性。计算采用的是单核心CPU,主频2.9 GHz,内存大小为8G。采用本文算法完成一个时间步的流固耦合计算需要时间为28.8s,而采用時间同步算法所需的计算时间为153.2s。本文的算法可以减少计算时间81.2%。
本文计算出的Wing445.6颤振边界,如图9所示。可以看出,考虑前4阶模态时,比只考虑第1阶模态的计算结果的准确性更好。而且,考虑前4阶模态时得到的计算结果与实验值的吻合度已经很高,所以没有必要考虑更高阶模态的影响。本文考虑前4阶模态,计算得到的Wing 445.6颤振频率如图10所示。马赫数小于1时,本文预测所得的颤振频率与实验值的相对偏差为1.5%;马赫数大于1时,本文预测所得的颤振频率与实验值的相对偏差为7.0%。可见,对于超出1马赫的情况,本文的预测值产生了较大的偏差。这主要是由于本文采用了RANS方程作为气动控制方程,而RANS方程不能准确捕捉超音速流动中激波边界层干扰及其所引发的流动分离现象,导致计算出的超音速颤振边界偏差较大。总体来说,本文的结果与实验值吻合较好,说明本文的算法是正确的。
4.结论
已有文献的时间同步流固耦合算法中,对流场进行多次迭代求解使得流场的计算时间增加,从而使流固耦合计算的总时间增加。针对这一问题,本文在时间同步流固耦合算法的基础上,结合本课题组所提出的快速动网格技术,发展了一种时空同步流固耦合算法。采用该算法对弹性梁流固耦合振动问题及Wing445.6颤振进行了研究。对弹性梁进行流固耦合计算后,发现弹性梁振动为第2阶弯曲振动,即弹性梁发生2阶弯曲颤振。计算得到的弹性梁振动的位移时间曲线与文献的结果一致。与原时间同步算法相比,本文的算法可以使流固耦合计算总时间减少82.1%。计算得到的Wing 445.6颤振边界也与实验数据吻合,说明了本文算法的正确性。