基于NUMECA的中高速艇阻力预报研究
2017-04-22 08:03赖海清方先进李明敏何江贤
船舶 2017年2期
赖海清 方先进 李明敏 何江贤
(广州船舶及海洋工程设计研究院 广州510250)
基于NUMECA的中高速艇阻力预报研究
赖海清 方先进 李明敏 何江贤
(广州船舶及海洋工程设计研究院 广州510250)
船舶阻力预报及水动力性能分析具有广泛的应用背景。文章结合现有的资料和试验数据,利用强大的CFD软件FINE/Marine对某中高速艇进行了阻力预报,计算表明,该方法能取得良好的精度,并可以清晰直观地显示流场的各种细节,形成一套适用于中高速艇的快速有效、切实可行的阻力预报方法。此外,研究了附体及其他船型参数对船舶阻力性能的影响,并进行了阻力性能影响分析,具有一定的实用意义。
FINE/Marine仿真平台;船舶阻力;附体
引 言
对民用船舶而言,快速性的优劣将在一定程度上影响船舶的使用性和经济性;对军用舰艇,快速性与提高舰艇的战斗力和生命力密切相关[1]。船舶快速性的主要影响因素是船舶阻力,为此,如何快速预报船舶航行阻力显得至关重要。
随着计算机技术和 CFD 软件的快速发展,未来船舶航行性能的确定,在很大程度上将依赖于在“虚拟水上试验” 数据[2]。FINE/Marine 是 NUMECA公司为船舶与海洋工程打造的专业 CFD 软件包,对于船舶工程问题的模拟,都可以通过其界面方便地设置,而无需工程师通过二次开发功能来实现。该软件为工程师的应用提供极大的便捷,并且高度自动化的全六面体非结构网格制作也使船舶工程师受益匪浅。
本文结合现有经验和试验资料,采用FINE/ Marine对300~500吨级的中高速艇船型,开展适用于中高速艇(Fr为0.3~0.8)的阻力预报方法研究,并将预报结果与船模水池试验结果进行比较,验证了该方法的可靠性;同时,在裸船体上增加压浪板、舭龙骨、舵、轴支架等附体,探讨了附体对总阻力的影响,并分析了浮心位置、尾封板宽度及折角线长度对阻力的影响,为今后的船型优化奠定基础。
1 数值计算
1.1 理论基础
船舶航行时速度较低(马赫数Ma一般小于0.3),因此周围的流动一般看作不可压缩流动。粘性不可压的流体的流动的基本方程包括连续性方程和动量守恒方程,其方程如下:

式中:ux、uy、uz分别为X、Y、Z 三个方向的速度分量,m/s;t为时间,s;ρ为密度,kg/m3。
动量守恒通常又被称为Naiver-Stokes方程(简称“N-S方程”):

式中:P为流体微元上的压强,Pa;τxx、τxy、τxz是作用在微元体表面上的粘性应力τ的分量,Pa;fx、fy、fz为3个方向的单位质量力, m/s2。
FINE/Marine求解器ISIS-CFD具有丰富的湍流模型,包括 Spalart-Allmaras模型、Wilcoxk-w模型、SST k-w模型、雷诺应力模型、 EASM-k-w模型、DES模型,用户可以根据计算需要选择不同的模型。为进一步提高湍流模拟的精度,FINE/Marine还为湍流模型提供了壁面函数及旋转修正。本文采用的是SST k-ω模型[3],自由液面处理采用的是自由液面捕捉法。该方法与自由液面追踪法相比,灵活性和适应性更好,可较好地处理破碎波等复杂的自由液面,并且由于采用了可压缩性的离散格式,故减少了自由液面的数值耗散问题。
1.2 预报流程
1.2.1 模型前期处理
首先,在专业船舶建模软件Maxsurf中建立船体外壳模型,然后在UG或Rhinoceros中,对模型进行封闭完善,并生成体模型(因为FINE/Marine对Maxsurf这类软件导出的igs面无法识别,因此需在三维建模软件中进行封闭,并定义为体模型),得到FINE/Marine可识别读取的三维模型。
1.2.2 边界条件及网格划分
利用C-Wizard模块将处理好的船体模型文件导入FINE/Marine,激活模块中的阻力计算功能。为提高计算精度,注意勾选Trim和Sinkage(即考虑船体的升沉和纵摇运动的影响),输入所需计算的航速及设计吃水,随后进行网格划分。
FINE/Marine采用国际上最先进的由体到面的网格生成方式,将复杂模型计算域的网格生成简化为仅需使用者选择几个参数和进行几个操作步骤的过程,在很大程度上颠覆了传统网格划分工具(如Gridgen、 ICEM 等软件)的网格划分方式,实现了粘性网格技术、高度自动化技术和复杂外形的适用性技术等几大非结构网格技术优势的结合。
网格划分方法为:
(1)生成初始网格。将计算域外部边界围成的区域均匀划分成初始网格。
(2)网格适应。按曲率、间隙、目标网格单元尺寸等准则在需加密的地方自动细化网格,并删除与计算域边界相交和位于计算域外的所有网格单元。
(3)吸附和优化。将适应后的网格投影到模型外形上,并自动吸附到所有的角点和棱边上,生成贴体网格,并优化网格质量。
(4)插入边界层网格。将紧邻物面的一层网格进行拆分细化成若干层网格,快速生成边界层网格。在上述操作中,通过设置适当的参数,对较复杂计算域快速生成较高质量的全六面体非结构网格。
1.2.3 计算及后处理
网格划分后,将设定船的排水量及重心位置,其坐标原点也与导入船体的坐标原点保持一致。时间步长及时间步的设定需注意:时间步过小则浪费计算资源,时间步过大则无法保证计算精确度,时间步长一般应保证流体经过特征长度(船长)有100个时间步长,这样既保证精度又能合理利用计算资源。最后采用多核来并行计算,对多个任务进行排序。当完成一个模型计算后,不需要人工干预,便可自动进入下一模型的计算。计算完成后通过计算监控器检查计算是否收敛(阻力监视曲线达到平稳状态即为收敛),并选取最后20 ~30 s的数据进行数值平均,便可得出本船航行阻力[4]。打开CFView后处理模块进行后处理,还可以获得船舶表面的压力分布、流线、自由液面波高等结果。
2 阻力性能研究
2.1 数值验证
结合我院在某300 t公务艇项目中积累的试验资料,采用FINE/Marine对该艇裸船体和加装附体的船体模型进行计算,并与试验结果进行验证。该公务艇采用圆舭转折角船型,主要参数见表1。

表1 300 t公务艇主要参数
本计算依据该艇模型试验时的试验环境进行建模和边界条件设置(包括船体模型大小、计算域尺寸、水温、重心位置等),并结合中高速船航行特点,对自由液面位置的网格进行特殊处理;同时考虑到计算域的对称性,为节省计算资源,按半船进行建模、网格划分和计算研究[5]。本计算均按缩尺比为1 : 11.862进行傅汝德数换算后再进行阻力计算,裸船体网格的数量约为750 000个、时间步长约为0.02 s、计算时长约为60 s,模型及网格划分结果如图1所示。

图1 模型及网格划分图
2.1.1 裸船体阻力验证
裸船体模型阻力计算结果与模型试验对比参见下页表2与图2。

表2 裸船体模型阻力计算结果与模型试验对比表

图2 裸船体模型阻力计算结果与模型试验对比图
由表2和图2对比可知:裸船体阻力预报结果与试验结果的平均误差约4%,且误差随着航速增加而越来越小。这是由于计算模型与试验模型的流体保持一致,主要的区别则在于船体表面的粗糙度。在低航速段,摩擦阻力占总阻力的大部分,而计算模型与试验模型的粗糙度差别较大,因而相对误差较大;随着航速的增加,粘性阻力占总阻力的成分越来越大,粗糙度的影响也就越来越小,因而相对误差也越来越小。
2.1.2 加装附体的船体阻力验证
在该艇裸船体模型基础上增加附体模型,增加的附体有舵、轴和轴支架。所有附体均采用UG建模,整个计算网格数量约80万个,计算时长约为60 s。结合该艇带附体正浮模型试验数据进行对比验证,结果如图3所示。

图3 附体模型及网格放大图

表3 全附体模型阻力计算结果与模型试验结果对比表
对比可得:加装附体的船体阻力预报结果与试验结果平均误差在1%左右;设计航速(32 kn)处的误差小于1%。船舶自由液面尾迹流见下页图4。

图4 自由液面尾迹流对比图
由此,可得出如下结论:
(1)裸船体模型预报平均误差约4%,全附体模型预报误差约1%,预报值基本低于模型试验值,可满足工程应用需要。
(2)全附体模型阻力预报精度要高于裸船体模型。加装附体后,考虑到附体与主船体间 、附体与附体间及粘性阻力与兴波阻力间的耦合影响,粘压阻力与船体尾部的形状和后部纵向压力梯度关系较大。从图4可以看出,裸模型在主体后半段的波高大于全附体模型主体后半段波高。从压力的观点来看,裸船体模型首尾压力差小于全附体模型的首尾压力差。这一变化会增加全附体模型所受的兴波阻力,而加装附体会导致粘压阻力占大部分,从而间接减轻了粗糙度的影响,故阻力误差较小[6]。
2.2 阻力性能影响分析
为进一步研究本船的阻力性能,运用Maxsurf软件改变该艇的浮心位置、尾封板的宽度以及折角线的长度,再导入FINE/Marine分别进行中高速阻力计算,对阻力性能进行分析。
2.2.1 浮心位置的影响
保持该艇外形不变,在Maxsurf中通过调整船内的压载使浮心位置向船首和船尾分别移动2%。调整前后的浮心位置见表4。

表4 调整前后的浮心位置m
导入FINE/Marine进行阻力计算,不同航速下 阻力数据见表5。

表5 LCB变化阻力对比表
由表5的对比数据可知:当航速为16 kn时,阻力随着浮心位置后移而减小;而当航速大于16 kn时,设计状态的浮心位置得出的阻力性能最优。总的来说,在中航速段(16~24 kn),浮心位置向船的首尾移动后的阻力变化较大;在高航速段(28~32 kn), 浮心位置的变化以及阻力变化范围都在2%以内,对本船阻力的影响较小,而浮心位置尾移比首移后阻力明显增加。考虑到该艇的设计航速为32 kn,在该航速下,设计状态的浮心位置得出的本船阻力性能最优。
2.2.2 尾封板的宽度影响
将尾封板宽度增大和减小3%,对比所带来的阻力影响(见表6)。

表6 尾封板变化阻力对比表
由表6中的阻力对比可知,无论是中航速段或者高航速段,改变尾封板后的阻力变化范围都在2%以内,对本船的总阻力影响并不大。因此,通过改变尾封板的宽度来进行阻力性能优化,其效果并不明显。
2.2.3 折角线长度影响
将计算模型在圆舭(折角线长度为0)、圆舭转折角(折角线占30%水线长度)和全折角线型(折角线长度占整个水线长)三种形式下的阻力进行对比,模型变化折角线变化见图5—图7。表7为折角线长度变化阻力对比。

图5 圆舭型
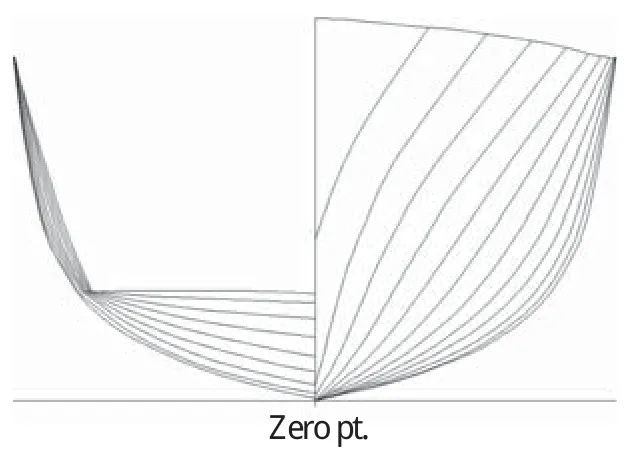
图6 圆舭转折角型

图7 全折角线型

表7 折角线长度变化阻力对比表
为更直观显示折角线长度变化产生的阻力影响,将不同航速的阻力做成折线图,如图8所示。
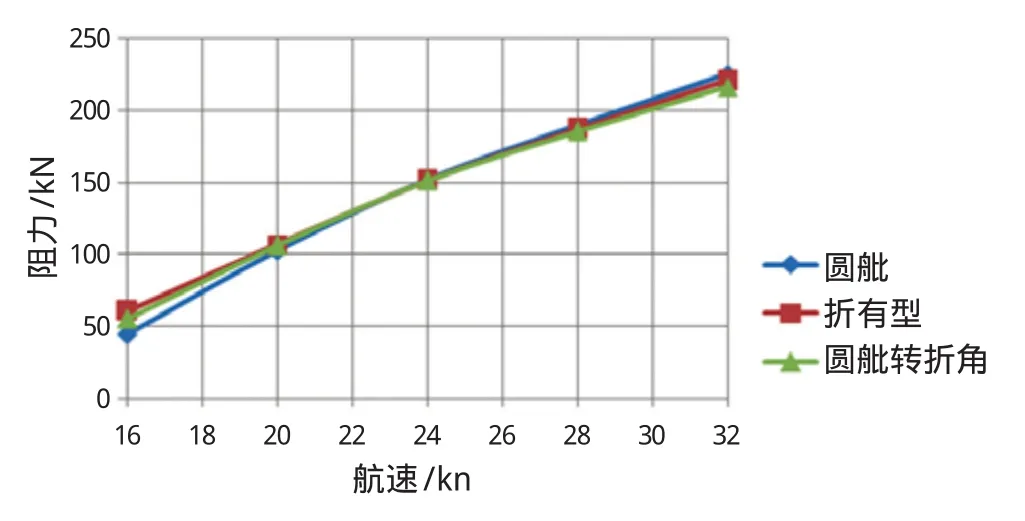
图8 折角线长度阻力对比曲线
由表7和图8不同折角线长度的阻力值对比可得:当航速小于20 kn时,折角线长度越短,本船的阻力也越小;当航速大于20 kn时,圆舭转折角型的阻力均小于圆舭型和全折角型的阻力。考虑到本船的设计航速为32 kn,因而本船设计的圆舭转折角型将使本船的阻力达到最优化。
3 结 论
在船舶阻力研究方法中,CFD法具有精度高、成本低、周期短等优点,是未来船舶性能研究的主要发展方向。本文利用FINE/Marine软件对中高速船型进行阻力预报,形成适用于中高速艇卓有成效的阻力预报方法——首先介绍CFD方法在船舶阻力预报的应用背景及理论基础;然后系统阐述FINE/Marine软件的基本操作流程及注意事项;最后结合已有经验资料及船型数据,对中高速艇进行阻力性能预报,通过与水池试验数据对比,获得良好的精度,同时还探讨了附体及型宽、尾封板长度及折角线长度对船舶阻力的水动力性能影响。结果表明:在高航速段(28~32 kn),浮心位置的变化对中高速艇阻力影响较小;在中航速段(16~24 kn),浮心位置向船首尾移动后的阻力变化较大;通过改变尾封板的宽度对船舶阻力性能效果并不明显;对于不同航速段,不同折角线长度对阻力影响有所区别。
由此可见,在设计此类船型时,应根据设计航速选择合适的折角线长度。
[1] 周芃.基于CFD的高速舰船与尾部伴流场的数值模拟[D]. 中国舰船研究院,2013.
[2] 贾力平,康顺.基于FINE/Marine的跨介质航行器数值模拟[J].计算机辅助工程,2011(9):99-101.
[3] 谢云平,彭言峰,彭鹏.基于CFD的高速排水型圆舭折角船型剩余阻力系数分析研究[J].船舶工程,2015(2):55-61.
[4] 朱芳艳. 船模自航试验数值模拟[D]. 武汉:武汉理工大学,2013.
[5] 张楠,杨仁友,沈泓萃,等.数值拖曳水池与潜艇快速性CFD数值模拟研究[J].船舶力学,2011(1):17-24.
[6] 冯毅.多桨船附体阻力的预报方法[J].船舶,2010(2):15-19.
信息 动态
MARIC加入无人货物运输船开发联盟
日前,由海航集团旗下的海航智造投资发展有限公司发起的无人货物运输船开发联盟(以下简称联盟)筹备会在上海召开,中国船舶及海洋工程设计研究院(MARIC)副院长沈伟平作为代表参会并签署了入盟意向书。参会的其他单位包括DNV、ABS、CCS、七一一研究所和海航科技物流集团有限公司等。
目前,无人货物运输船在全球还属于概念设计及实验阶段。随着大数据、互联网+、人工智能及机器人等新兴技术突飞猛进,船舶自动化水平逐步提高,这些都为无人运输船舶的实现提供了技术支撑,无人货物运输船将会成为未来海运发展的新趋势。
此次联盟囊括了船东、船厂、设计院、船级社、设备集成商,覆盖了从设计、建造、营运、监管的全部环节。各成员单位将在欧美航线规划、港口协调、国内政策更新及法规制定、无人船舶总体开发设计、无人船舶动力及控制系统研究、无人船舶操纵软件设计等方面进行共同探索和开发,各方将充分展现自己擅长领域的长板,最大程度发挥集成创新的优势,围绕共同的目标一起努力。
近年来,MARIC开始进入智能船舶领域的研究,参与国家工信部课题“智能船舶顶层设计及部分智能系统应用”,并完成了大型集装箱船智能船落地方案的总体设计。通过课题研究,对该领域国内外厂商的技术现状、国内系统集成的要点等问题有了一定程度的认知。
作为联盟发起人中唯一的船舶总体研发单位,MARIC将借助自身雄厚的技术力量和对无人智能船舶的长期跟踪研究经验,在无人货物运输船相关技术的研发、设计、试验等工作方面同各协作单位通力合作,确保在项目实施周期内完成令联盟满意的答卷。
此次联盟的筹建旨在开展无人货物运输船研发和制造并投入营运,计划3个月完成联盟筹建工作,确定目标船型、编制联盟计划,力争在2022年交付并运营全球首艘无人货物运输船,成为未来航运模式的开拓者。
Resistance prediction of middle-high speed vessel based on NUMECA
LAI Hai-qing FANG Xian-jin LI Ming-min HE Jiang-xian
(Guangzhou Marine Engineering Corporation, Guangzhou 510250, China)
The CFD method is widely used for the ship resistance prediction and the hydrodynamic analysis. Combined with the current material and the experimental data, this paper carries out the resistance prediction for a middle-high speed craft by using FINE/Marine. It shows that the predicted resistance agrees with the experimental data, clearly revealing the various details of the fl ow fi eld. This method is proved to be eff ective, practicable for the quick resistance prediction of the middle-high speed craft. In addition, it investigates the infl uence of the hull appendage and the other hull form parameters on the total ship resistance.
FINE/Marine simulation platform; ship resistance; appendage
U661.31+1
A
1001-9855(2017)02-0019-08
10.19423 / j.cnki.31-1561 / u.2017.02.019
2016-10-11;
2016-12-12
赖海清(1989-),男,硕士。研究方向:船舶性能优化及轮机设计。方先进(1984-),男,工程师。研究方向:船舶总体设计及管理。李明敏(1985-),男,硕士,工程师。研究方向:船舶性能研究。何江贤(1989-),男,硕士,工程师。研究方向:船舶与海洋结构物设计建造。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年11期)2022-07-15
水上消防(2022年1期)2022-06-16
舰船科学技术(2021年12期)2021-03-29
海洋开发与管理(2020年2期)2020-09-10
女报(2020年2期)2020-06-12
润·文摘(2020年2期)2020-03-09
船舶标准化工程师(2019年4期)2019-07-24
舰船科学技术(2018年7期)2018-07-25