
教育机器人小车循迹部分的设计与改进
2017-04-23 03:33朱婷叶俊
电子技术与软件工程 2017年5期
朱婷+叶俊
摘 要 本设计采用AT89S52单片机作为小车的控制核心;用红外探测传感器作为小车的循迹模块来识别白色路面中央的黑色引导线,采集信号并将信号转换为能被单片机识别的数字信号;其中软件系统采用C程序,本设计的电路结构简单,容易实现,可靠性高。智能化作为现代电子产品的新趋势,是今后电子产业的发展方向。在许多领域都会应用到寻迹系统,特别在智能物流方面。
【关键词】机器人小车 S52单片机 设计与改进
1 设计目的
在使用原厂QTI循迹传感器出现了很多问题,为了更准确,快速的达到我们的要求,我们重新设计循迹系统。同时要避免原厂QTI循迹传感器出现的如下问题:
(1)QTI模块可识别范围小。
(2)光照对QTI影响太大
(3)传感器离地面过低,影响小车正常运行。
(4)传感器位置难以调节。
(5)传感器没有指示灯显示传感器状态。
(6)传感器的灵敏度无法调节。
(7)传感器接线过多,故障率高,检测麻烦。
(8)QTI传感器体积小,安装困难。
(9)QTI模块上的红外对管功率低,抗干扰能力差。
为了提高智能小车的循迹稳定性,我们决定用ST188红外对管及设计的一些外围电路代替厂商提供的QTI循迹模块,解决原厂提供的QTI模块可识别范围小,检测不稳定,抗干扰能力差,离地间距过高传感器位置调整困难等问题,
通过自主设计的四路红外光电传感器循迹模块,显著提高比赛完成速度及可靠性,并能有效排除现场光线干扰问题,小车循迹地图不平,小车运行抖动导致QTI循迹传感器误识别等问题。
2 课题任务分析
在使用厂商提供的QTI传感器过程中我们遇到了诸多问题,在前面以及描述过,再在此举出一些特别明显的缺点说明,也是为了在设计中避免在出现这些问题。
(1)光照对QTI传感器干扰太强。
(2)要求传感器的离地太低.
(3)只能通过安装位置调整传感器的“0”和“1”的状态
(4)没有各个传感器的指示灯,不知道各个传感器的状态
3 理论设计方案
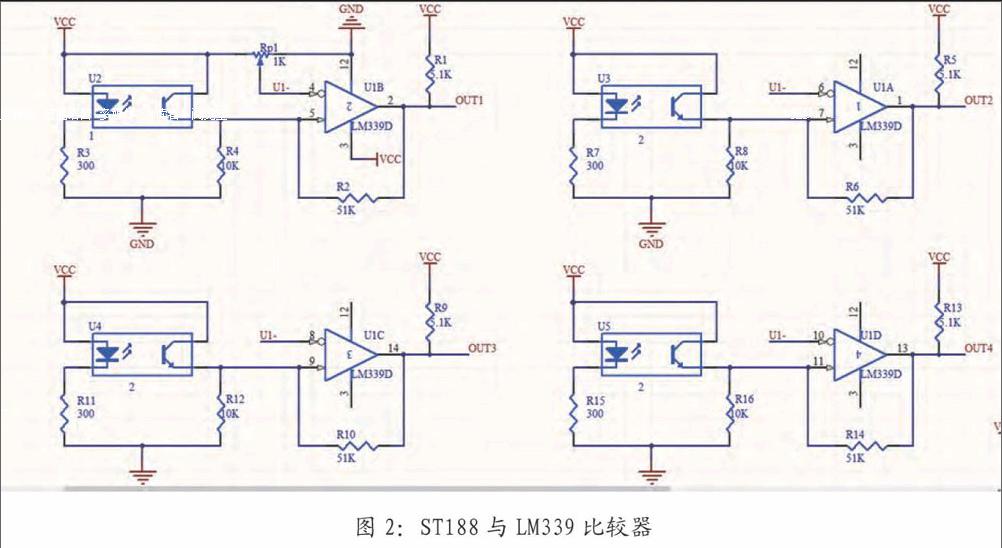
采用ST188红外光电传感器,ST188采用高发射功率红外光电二极管和高灵敏度光电晶体管组,检测距离可调整范围大,4-13mm可用;运用LM339电压比较器芯片, 内部装有四个独立的电压比较器,LM339是很常见的集成电路。4个ST188红外光电传感器的输出脚接入4个比较器,与同一个参数(运用20K可调电阻分压)比较,输出对应的值。
利用一个可调电阻进行分压,传入到比较器与4个ST188红外光电传感器传入的参数进行比较,然后输出。
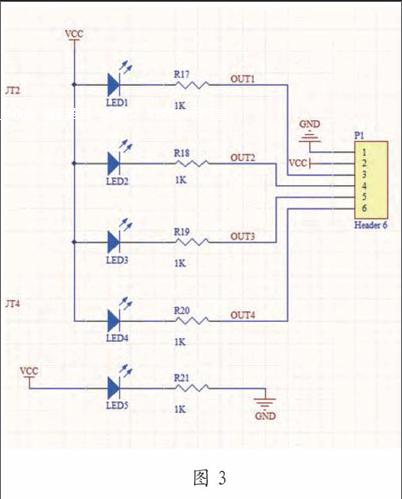
接入4个LED 发光二极管,分别于LM339電压比较器的4个输出脚相连,用来指示4个ST188红外光电传感器的实时状态。
4 设计电路
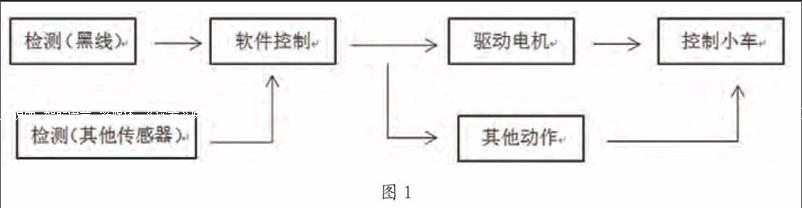
在智能循迹小车这个系统中,有如图1的逻辑顺序。
所以我们在设计的时候不能忘记整个智能小车实现的逻辑顺序。在理论成立的条件下,就可以开始动手再洞洞板上进行焊接,完成调试所使用的板子。
循迹系统电路图如图2。
从电路图3可以看出当ST188红外光电传感器检测到数据传到LM339电压比较器,经过比较器与可调电阻分压得到的值进行比较,输出。
当ST188检测到黑线,对应的LM339电压比较器输出脚为低,可以看到指示灯这时会亮;如果检测为白线指示灯灭。
同时也将比较器的4个输出脚与单片机连接,将数据交给单片机处理,判断整个系统的下一步动作。
设计方案说明:
通过可调电阻可以一起连调4个传感器,可以通过指示灯观察,不用担心传感器的安放位置对灵敏度的影响,更不用担心安装位置过低造成的影响其他问题。
5 软件的设计
系统功能的实现依赖于软、硬件的协同工作。循迹系统最终返回到单片机的只有“0”和“1”两个数据。我们可以使用串口查看循迹系统返回的数据。单片机的到数据会采取相应的措施,如果是循迹就会让电机做出一定的动作,如果是其他的就采取对应措施。
例如循迹系统返回的数据为0 0 1 1,我们知道传感器检测到黑线为0,检测到白线为1,所以此时就为黑黑白白,说明小车已经歪了,需调整。因为正常情况下车身正直为:白黑黑白,既为1 0 0 1,所以小车此时需要往左微调,使车身正对黑线。
6 调试
如图4所示。
LM339AD是一个运放,在这是当成一个电压比较器来使用
6 脚的电压高过7脚的电压时,运放输出低(即00端口输出低)
反之,输出高电平。
当ST188前面没有什么反射物的时候,它是不导通的,等于是没有这个元件。
那么,VCC的电源电压会经过R2直接给3脚加上一个电源的电压,就是5V,这个时候,2脚的电压是由电位器分压得来的,肯定没有5V,所以,运放输出高电平,(即00端口输出高)。
当ST188前面的可以反射的物体时,红外反射到接收,CE两极等于是短路,3脚的电压就会是0V, 运放输出低电平, (即00端口输出低)在调试过长中,我们发现,将电路原理图中的R5换成20k时红外光电对管的检测距离变的很长,碍于小车底盘较低,安装上循迹模块后,因传感器与地面高度很低,无法识别黑线,因此我们最后将R5换成了10k,装上小车后,能正常检测黑线。
参考文献
[1]郭天祥.51单片机C语言教程[M].北京:电子工业出版社,2009.
[2]刘火良,杨森.STM32库开发实战指南[M].北京:机械工业出版社,2013.
[3]高吉祥.数字系统与自动控制系统设计[M].北京:高等教育出版社,2013.
[4]王晓明.电动机的单片机控制[M].北京:北京航天航空大学出版社,2011.
