
定子齿结构TRUM离散化动力学分析方法*
2017-04-27 07:50孙鹤旭李国庆
振动、测试与诊断 2017年2期
孙鹤旭, 荆 锴, 董 砚, 李国庆
(1.河北工业大学控制科学与工程学院 天津,300130) (2.河北省控制工程技术研究中心 天津,300130) (3.河北科技大学电气工程学院 石家庄,050018)
定子齿结构TRUM离散化动力学分析方法*
孙鹤旭1,2,3, 荆 锴1,2, 董 砚1,2, 李国庆1,2
(1.河北工业大学控制科学与工程学院 天津,300130) (2.河北省控制工程技术研究中心 天津,300130) (3.河北科技大学电气工程学院 石家庄,050018)
基于目前行波型旋转超声电机定转子非线性接触动力学理论研究的复杂性,提出一种简易求解的界面离散化动力学分析方法。首先,着眼于定子齿的离散分布特性,化定转子齿面接触为离散点接触,在定子齿与转子的不同接触状态下,通过引入等效刚度的概念,对定子齿与转子间的轴向作用力进行求解,从而获得定转子的离散等效作用力,确立定转子的相对运动关系;然后,从离散接触点的三维运动特性出发,分析接触过程中的径向和周向摩擦力,从而研究输出机械特性和界面能耗;最后,通过仿真和实验,验证了该方法对接触界面动力学的准确描述。
行波型旋转超声波电机; 定子齿; 接触界面; 离散化; 动力学
引 言
行波型旋转超声电机(travelling-wave rotary ultrasonic motor,简称TRUM)是超声电机中最具代表性的一种,其原理是通过对压电振子施加两相高频电压,激发定子超声波频段的微幅行波振动,利用定、转子的接触摩擦作用,驱动转子旋转并输出转矩[1]。其中,定转子的接触作用是电机输出转矩的关键,但由于接触过程机理复杂,且具有很强的非线性,其机理描述和动力学求解方法十分复杂,不利于TRUM的深入研究。
目前,国内外大多对定转子接触的动力学研究是基于Hagood模型进行的[2-3],模型依据“刚性定子-弹性转子”的假设,从沿圆周展开的二维坐标研究接触界面的动力学关系。这样的研究忽略了定子齿结构的作用,也未考虑定子径向的运动,尽管做了许多简化,但其方法仍然复杂。此外,文献[4-5]提出刚性转子与定子的理想单点接触分析方法,陈超等[6-7]提出了TRUM半解析模型,划分定子子结构,基于定转子三维运动采用有限元方法分析定子齿的运动和定转子的接触动力学关系。文献[8]提出定转子接触作用的等效电路模型,以电学量类比机械量,对接触界面动力学特性进行分析研究,此方法求解亦相对复杂。文献[9-10]均采用了实验的方法从振动模态的角度分析接触作用。
有限元方法在TRUM定转子的接触研究中具有重要的意义。文献[11]采用有限元分析了定转子接触特性。周盛强等[12-13]在ANSYS环境下分析了定转子稳定工作时接触面空间域特性。有限元方法由于求解复杂,计算耗时,通常需借助一些商业软件完成,故不便于TRUM定转子接触界面动力学的研究,通常更适合稳态分析[14]和电机结构优化[15]等。
根据TRUM定子表面齿状结构带来的接触面不连续的特点,提出一种基于定子齿结构的界面离散化动力学研究方法。该方法以每个定子齿作为计算单元,化定子齿面接触为离散点接触,从而求解不同接触状态下的接触区域和轴向等效压力,进而根据离散接触点的三维运动,推导接触摩擦力,计算输出转矩,获得整个定转子接触界面的动力学输出特性。该方法采用离散化接触的等效手段,在简化计算的同时,保证了接触机理性能的真实性和准确性。
1 定转子接触动力学基础
当给电机A,B两相施加电压,定子被激出两相模态w=[wA,wB]T,并满足如下机电耦合方程
(1)
其中:Ms,Ds和Cs分别为两相模态质量矩阵、阻尼矩阵和模态刚度矩阵;Θ为机电耦合系数;u为两相激励电压;FC为界面接触模态力。

(2)

对于平均半径rc、定子齿轴向位置zc的接触环面来说,接触点的轴向位移us z以及径向、周向速度vs r和vs θ是接触分析中的3个重要变量。
定转子接触过程中认为定子与转子均是刚性的,受定子振动而发生形变的是附着于转子下表面与定子接触的宽为b、厚为h的摩擦衬垫。在定子接触面3维运动的作用下,转子存在轴向和周向两个自由度的运动,其运动平衡方程为
其中:MR,DR,JR分别为转子的质量、轴向阻尼以及转动惯量;zR,ωR为转子轴向位移和旋转角速度;Fz,Te分别为对转子产生的轴向作用力和输出转矩;Fa,Tload分别为转子所受预压力和负载转矩。
2 定转子接触界面的离散化作用
2.1 接触界面的离散化
如图1所示,定转子的接触作用仅存在于m个定子齿与平均半径为rc的转子环形摩擦层之间,接触面不再是连续的。笔者提出将每个齿接触面上的相互作用关系等效离散化为点点接触的关系,从而通过求解离散点的接触作用来研究定转子间的动力学关系。

图1 TRUM接触界面的离散化Fig.1 Discretization of the TRUM contact interface

(5)

(6)
2.2 轴向压力和接触边界的离散化动态求解
TRUM定转子接触状态可分为未加电压时的静态接触和施加电压产生模态振动时的动态接触两种状态。从离散化的定转子接触关系可知,无论哪种状态下定子对转子的轴向作用力为
(7)

静态接触下,如图2(a)所示,由于转子受预压力Fa的作用压在定子上,摩擦层在各齿的范围上形变量均相同,记作z0,则
(8)
由静态受力平衡Fz=Fa得
(9)

图2 TRUM定转子接触接触状态Fig.2 Contact state of the stator and rotor of TRUM
动态接触下,如图2(b)所示,转子摩擦层在定子振动的作用下被压缩,计算各个离散接触点轴向压力所需的各点摩擦层形变量,通常参考于摩擦层的未形变面轴向位移,也就是接触边界θ0的轴向位移
(10)
离散化的每个齿在其范围θt上的有效接触面将因接触状况不同而不同,存在以下3种情况:
1) 全接触
定子齿j在θt上完全与摩擦层接触,如果假设摩擦层形变在该区域上呈线性分布,则
(11)
(12)
2) 部分接触
如图3所示,θ0位于定子齿j的范围内,实际接触面仅为θ0左侧的一部分,依线性化近似求解
(13)
图3 部分接触时等效求解Fig.3 Equivalent calculation when partial contacting
由于式(13)中存在极限
(14)
不便于求解,于是取等效刚度
(15)
则式(13)变为
(16)
3) 不接触
(17)
综合3种情况,动态接触下的轴向压力Fz为
(18)


图4 等效刚度分布曲线Fig.4 Curve of the equivalent stiffness
在轴向动态方程中,许多研究中认为zR就是上述分析中的z1,然而,z1只是zR的中动态位移,其中还包括定转子从静态接触向动态接触过渡时,摩擦层从静态压缩恢复到未形变状态的位移,数值等于z0,故zR=z1+z0。当预压力Fa不变时,z0为常数,式中zR的微分与z1的相同。于是将式(18)代入式(3)整理得
(19)
且有
(20)
其中:MR,DR均为正常数;CR>0,因不同接触情况而变化。
于是该动态传递函数的特征方程一定有两个负根,故该系统是稳定收敛的,就可动态地计算z1,从而实现接触边界θ0的求解。由于采用了离散化的计算方法,并且通过合理近似保证了求解的准确,整个计算过程较解析法、有限元法均要简单。
2.3 定转子接触摩擦的离散化及转矩输出
定转子间的摩擦作用,经接触点离散,各点对转子的切向摩擦力与轴向压力成正比
(21)
其中:μ为定子与转子摩擦层的动摩擦因数。
当转子所受摩擦力的方向取决于接触点的运动方向,根据式(2)离散接触点的径向、周向速度可表示为
(22)

(23)
其中:径向摩擦力不对转子做功,仅仅产生损耗;周向摩擦力所做的功取决于离散点处vs θ-vR的方向。周向摩擦力产生输出转矩为
(24)

图5 界面离散接触摩擦作用示意图Fig.5 The friction on the interface
2.4 接触界面能量损耗及输出效率
定、转子接触作用的能量损耗是由于定、转子在径向和周向相对滑动摩擦而引起的,如果按一个电周期T平均,摩擦损耗分别为
(25)
于是电机界面接触总的摩擦损耗为
(26)
由电机的输出功率为
(27)
可得电机接触界面能量传递的效率为
(28)
以上可见,TRUM接触界面的动力学离散化计算推导相比解析、有限元方法,更能简易、清晰地反映出TRUM接触界面的动力学特征,为TRUM的接触研究提供便利的方法。
3 离散化接触界面动力学仿真与实验
以TRUM-60型电机为例,电机参数见表1。
表1 电机参数表
Tab.1 Parameters of the TRUM
参数数值振波数k9定子齿数m72转子半径rc/mm27.58摩擦层厚度h/mm2.74摩擦层宽度b/mm0.2弹性模量E/MPa280摩擦因数μ0.2
在Matlab/Simulink仿真环境下对该电机的接触界面特性以及输出机械特性进行验证。
3.1 界面特性仿真
电机工作在B09模态,根据定子齿数m=72,则按定子齿离散后,一个振动波长下覆盖l=8个离散点。预置振动模态幅值W=1.1 μm,频率40 kHz,施加预压力为Fa=160 N。根据界面离散化动力学分析研究方法,将研究定转子接触界面上离散点轴向位移,轴向压力,径向、周向速度和径向、周向摩擦力等动力学特性。


图6 离散化界面接触特性Fig.6 Contact characteristics of the discretized interface
3.2 机械特性仿真及实验对比
当TRUM的材料、结构已确定的情况下,预压力是影响电机机械特性的惟一可调整的参数。图7示出不同预压力下的机械特性曲线。
图7(a)显示随着预压力增大,空载转速减小,堵转转矩增大,整体机械特性变硬。而由图7(b)可以看出,电机的最大输出功率随预压力增大向右移,最大功率值略有减小。
界面周向和径向的损耗如图7(c)所示,周向损耗随负载转矩增加而增加,径向损耗随转矩略有减小,随着预压力增大两种损耗也相应增加。效率曲线如图7(d)所示,随着预压力的增大,最大效率点右移但逐渐减小。
从仿真结果看,笔者提出的分析方法对TRUM的特性具有良好的描述,对比目前在界面动力学分析中常用的有限元法[6,12],本分析方法在运算上更加简单易行,不失描述的准确性。通过图8所示的仿真实验对比曲线更能说明这一点,其中“×”为利用测功机多次实验测量获得的数值。实验数据与仿真曲线较为契合,证明了通过接触界面的离散分析,亦可真实描述TRUM定转子接触界面的运动、力学关系。

图7 不同预压力下电机输出机械特性Fig.7 Mechanical characteristics in different pre-pressures
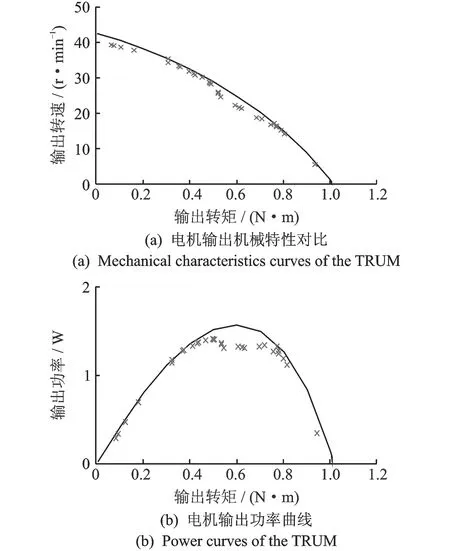
图8 电机机械特性的模型仿真与实验结果对比Fig.8 Mechanical characteristics comparison of the simulations and the experiments
4 结束语
笔者提出了一种TRUM定转子接触界面的离散化动力学分析方法,以不连续分布的定子齿结构为研究单元,化面接触为点接触,有效降低了接触作用力求解的复杂度,并结合定转子三维运动,准确地对离散化的接触点的动力学关系进行描述,从而为TRUM接触界面动力学研究提供了理论方法。最后通过仿真及实验对比,验证了方法对电机接触界面动力学描述的准确性和真实性。
[1] 赵淳生.超声电机技术与应用[M].北京:科学出版社,2007:162-163.
[2] Hagood N W I, Mcfarland A J. Modeling of a piezoelectric rotary ultrasonic motor[J]. IEEE Transactions on Ultrasonics Ferroelectrics & Frequency Control, 1995, 42(2):210-224.
[3] Zhu Meiling. Contact analysis and mathematical modeling of traveling wave ultrasonic motors[J]. IEEE Transactions on Ultrasonics Ferroelectrics & Frequency Control, 2004, 51(6):668-679.
[4] Lemaire-Semail B. Causal modeling and identification of a travelling wave ultrasonic motor[J]. European Physical Journal Applied Physics, 2003, 21(2):151-159.
[5] Giraud F, Lemaire-Semail B, Aragones J, et al. Stability analysis of an ultrasonic motor for a new wave amplitude control[J]. IEEE Transactions on Industry Applications, 2009, 45(4): 495-501.
[6] 陈超, 赵淳生.旋转型行波超声电机中三维接触机理的研究[J]. 中国电机工程学报, 2006, 26(21): 149-155.
Chen Chao,Zhao Chunsheng. Study on the three dimensional contact mechanism of traveling wave type rotary ultrasonic motor [J]. Proceedings of the CSEE, 2006,26(21): 149-155. (in Chinese)
[7] 陈超, 曾劲松, 赵淳生. 旋转型行波超声电机理论模型的仿真研究[J]. 振动与冲击, 2006, 25(2): 129-133.
Chen Chao, Zeng Jinsong, Zhao Chunsheng. Study on the analytical model of the rotary traveling wave type ultrasonic motor[J]. Journal of Vibration and Shock, 2006, 25(2): 129-133. (in Chinese)
[8] 颜佳佳, 阮新波.旋转型行波超声电机的等效电路模型[J].中国电机工程学报, 2009, 29(15): 80-87.
Yan Jiajia, Ruan Xinbo. Electrical equivalent circuit model of traveling wave rotary ultrasonic motor [J]. Proceedings of the CSEE, 2009, 29(15): 80-87. (in Chinese)
[9] 姚志远,吴辛,赵淳生.行波超声电机定、转子接触状态试验分析[J] .振动、测试与诊断, 2009, 29(4): 388-391.
Yao Zhiyuan, Wu Xin, Zhao Chunsheng. Test of contact interface properties of stator and rotor in travel ling wave ultrasonic motors[J]. Journal of Vibration, Measurement & Diagnosis, 2009, 29(4):388-391. (in Chinese)
[10]王寅, 金家楣, 黄卫清. 一种面内行波旋转超声电机的模态试验方法[J]. 振动、测试与诊断, 2011, 31(5): 596-599.
Wang Yin, Jin Jiamei, Huang Weiqing. Modal testing method for rotary ultrasonic motor using in-plane travelling wave[J].Journal of Vibration, Measurement & Diagnosis, 2011, 31(5): 596-599. (in Chinese)
[11]Shen Shengnan, Lee H P, Lim S P, et al. Contact mechanics of traveling wave ultrasonic motors[J]. IEEE Transactions on Magnetics, 2013,49(6): 2634-2637.
[12]周盛强, 赵淳生, 黄卫清. 旋转型行波超声电机接触界面的空间域分析[J].中国电机工程学报, 2010, 30(12): 63-68.
Zhou Shengqiang, Zhao Chunsheng, Huang Weiqing. Contact analysis of traveling wave type rotary ultrasonic motor in space domain[J]. Proceedings of the CSEE, 2010, 30(12): 63-68. (in Chinese)
[13]周盛强, 赵淳生. 超声电机接触界面的两种简化有限元模型[J]. 振动、测试与诊断, 2009, 29(3): 251-255.
Zhou Shengqiang, Zhao Chunsheng. Two simplified finite element models for contact analysis of ultrasonic motor [J]. Journal of Vibration, Measurement & Diagnosis, 2009, 29(3): 251-255. (in Chinese)
[14]Frangi A, Corigliano A, Binci M, et al. Finite element modelling of a rotating piezoelectric ultrasonic motor[J]. Ultrasonics, 2005, 43(9): 747-755.
[15]Bolborici V, Dawson F P, Pugh M C. A finite volume method and experimental study of a stator of a piezoelectric traveling wave rotary ultrasonic motor[J]. Ultrasonics, 2013, 54(3): 809-820.

*河北省自然科学基金资助项目(E2013202108);河北省研究生创新资助项目(2015);河北省重大科技成果转化资助项目(13041709Z)
2015-08-20;
2015-10-23
10.16450/j.cnki.issn.1004-6801.2017.02.028
TH113; TM356
孙鹤旭,男,1956年8月生,博士、教授、博士生导师。主要研究方向为运动控制、工程系统与控制。曾发表《Current dynamically predicting control of PMSM targeting the current vectors》(《Journal of Electrical Engineering & Technology》2015, Vol.10,No.3)等论文 E-mail:hxsun@hebust.edu.cn
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
电机与控制学报(2022年6期)2022-07-15
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2022年2期)2022-04-26
航空发动机(2022年1期)2022-03-11
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
科技信息·下旬刊(2018年9期)2018-10-21
