
高空长航时太阳能无人机高效气动力设计新挑战
2017-04-28 03:45段卓毅耿建中李军府
空气动力学学报 2017年2期
段卓毅, 王 伟, 耿建中, 张 健, 李军府
(中航工业第一飞机设计研究院, 陕西 西安 710089)
高空长航时太阳能无人机高效气动力设计新挑战
段卓毅, 王 伟*, 耿建中, 张 健, 李军府
(中航工业第一飞机设计研究院, 陕西 西安 710089)
高空长航时太阳能无人机具有飞行雷诺数低、结构柔性大等设计特点,在气动力设计时,一般采用单设计点的设计思想,即在预定设计状态下具有较为优异的气动特性,但稍微偏离该设计点时,将显著地削弱其气动力特性,为其高效气动力设计带来诸多新挑战。本文首先简要回顾了太阳能飞机的发展历程,并分析了该类飞机的设计特点;随后,重点介绍了该类飞机的高效低雷诺数气动力设计面临的挑战及机翼气动弹性效应对全机气动力特性的影响;最后,分析展望了缩比自由飞验证技术在该类飞机高效气动力设计中的应用。
太阳能无人机;低雷诺数;气动力设计;气动弹性;缩比自由飞;单设计点
0 引 言
飞得更高、飞得更久是航空工作者孜孜追求的目标之一。近空间或临近空间区域内的风场变化规律较为平稳,并且具有较高的太阳能利用效率,为大尺度高空长航时太阳能无人机提供了天然的使用环境;另外,随着航空科学技术与新能源技术的发展及其有机结合,太阳能动力驱动的飞行器仅依靠太阳辐射能量、光伏组件和二次电池组成“采充放”(采能、储能、供能)系统,再由螺旋桨推进系统提供拉力维持飞行,可实现真正意义上的高空长久不间断飞行,使人类实现跨月、跨季度甚至跨年飞行的梦想不再是遥不可及的愿景[1-4]。
若高空长航时太阳能无人机装载有对地监测的遥感设备,则能够对被监测区域进行高分辨率观测,进而达到实时监测的目的,可有效地补充卫星等对地监测的不足。高空长航时太阳能无人机作为通信中继站时,与地面通信中继站相比具有覆盖区域广、直视范围内通信衰减小等优点,与卫星通信相比具有衰减小、延迟时间短等优点,并且可以多次回收,便于通信系统的快速更新、升级等,而且具有较好的灵活性。高空长航时太阳能无人机作为预警系统子单元搭载有预警设备时,比常规机载预警系统的滞空能力强,比地面预警系统具有更高的探测能力、更好的灵活性及安全性,相比预警卫星可以实现实时、定点预警,并且维护成本相对更低、分辨率更高。高空长航时太阳能无人机可以有效地弥补常规燃油动力飞机与低轨道卫星之间的任务执行空白,补充完善空间信息格栅,具备广泛的发展潜力及应用前景。这引起了研究者广泛的研究兴趣,并在多个国家频繁传出新的研究进展[5-24]。
由于高空长航时太阳能无人机飞行高度较高(一般H>18000 m),大气密度低且较为稀薄,其飞行速度又较低,导致其飞行雷诺数较低,流体流动常常处于层流状态,抗逆压梯度能力弱,容易产生分离、转捩等流动现象。大量实验也表明,气动性能随雷诺数的降低,将出现急剧下降,从而对高空低速大展弦比高空长航时太阳能无人机的气动设计带来较大挑战。另外,高空长航时太阳能无人机一般采用柔性机翼结构设计思想,在气动载荷的作用下,机翼将产生较大的弹性变形,从而引起气动载荷的重新分布,影响全机的气动特性,是该类飞机气动力设计面临的另外一个挑战。
本文首先回顾高空长航时太阳能无人机的发展现状,并分析该类飞机的设计特点,随后分析了高空长航时太阳能无人机低雷诺数气动力设计技术面临的挑战和静气动弹性效应对全机气动特性的影响,最后讨论了缩比自由飞验证技术在高空长航时太阳能无人机总体气动设计中的工程应用。
1 高空长航时太阳能无人机的发展现状及设计特点分析
1.1 高空长航时太阳能无人机的发展现状
高空长航时太阳能无人机作为一种很有发展前途的机种,受到了许多国家的重视,是侦察卫星、有人战略侦察机和电子战飞机的有效补充,且具有使用维护成本低廉、低风险、绿色环保无污染等优势。在大气环境监测、天气预报、灾害监测、通信中继、边境巡逻、广域持久侦察、电子对抗等军民用具有广阔的发展前景。自1974年11月4日世界上第一架太阳能飞机Sunrise I首飞至今已有数十个太阳能飞机的研究被公开报道,如图1所示。
近十年来,随着光伏组件转换效率、二次电池能量密度的提高,重力储能等航迹规划技术的有效应用,以及新材料、微电子等技术的发展,太阳能无人机的高空跨昼夜飞行即将实现的事实,逐渐得到了研究者的广泛认可。其中获得连续资助的主要有美国的“太阳神”系列[15-18]和英国的“西风”系列[19]太阳能无人机等。在试飞的过程中,“太阳神”系列太阳能飞机曾创下螺旋桨动力飞行器最高的飞行高度记录(突破30km);2010年7月,“Zephyr 7”以14天22分钟的连续飞行刷新了原先由“Zephyr 6”保持的最长飞行时间的记录[20]。
根据高空长航时太阳能无人机的发展现状及历程,可以将其设计理念的发展过程划分为三个典型阶段,如图2所示:让“飞机”飞的概念设计阶段;让“载荷”飞的快速发展阶段;让“能源”飞的工程实现阶段。
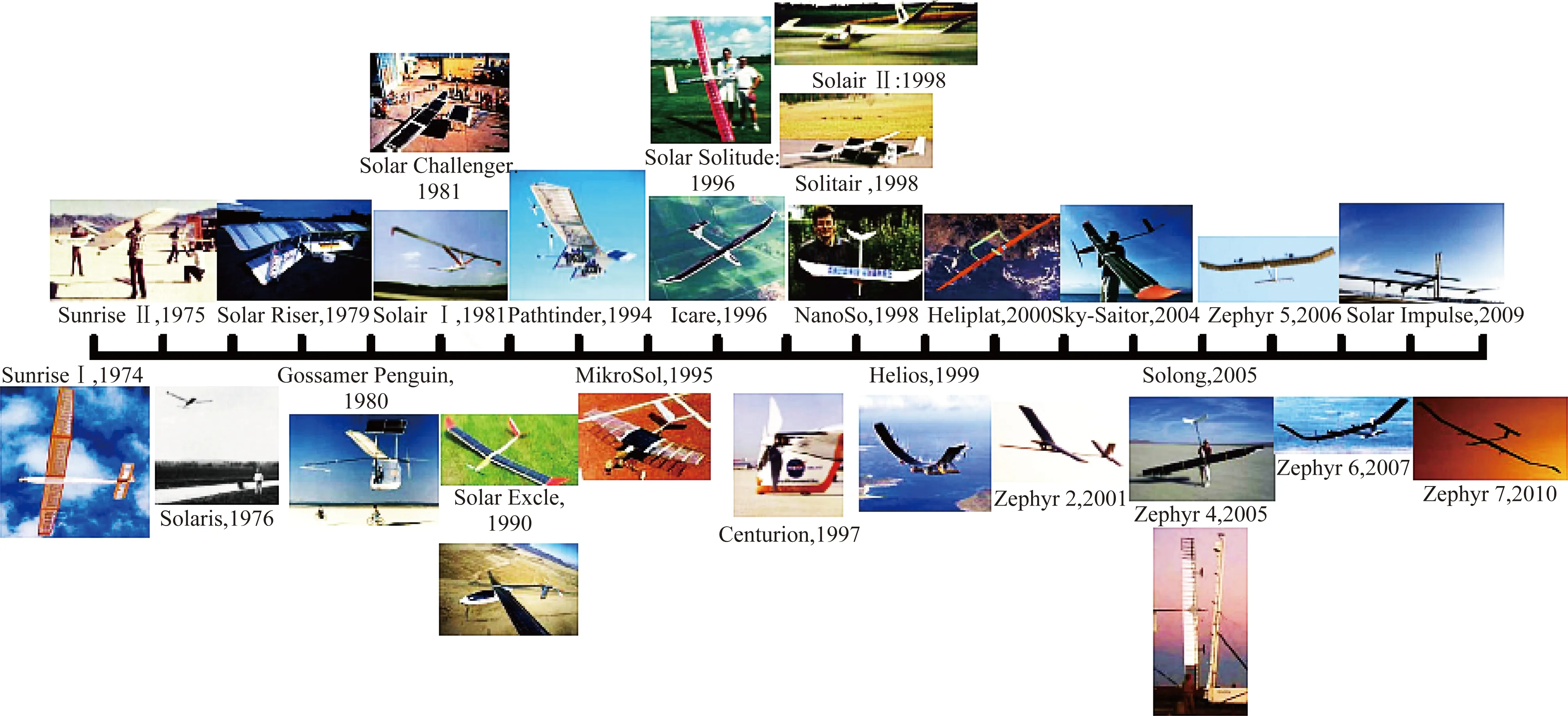
图1 太阳能飞机的发展历程Fig.1 Developing history of solar powered aircraft
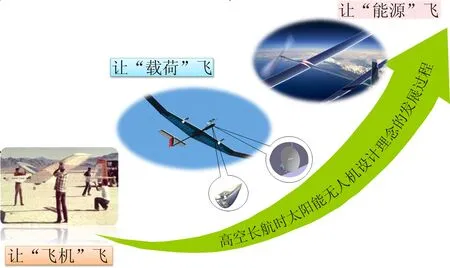
图2 太阳能飞机设计理念的发展历程Fig.2 Developing history of concept design for solar powered aircraft
在太阳能飞机发展的初期阶段,主要是以验证其布局设计的可行性为目的,并不着重强调高空和长航时等设计指标。随着太阳能无人机设计技术的进一步发展和提升,研究者们逐步实现了在搭载一定有效载荷的前提下,验证该类飞机在海拔20 km以上高度的高空飞行单一设计指标;随着蓄电池技术的发展,二次电池的能量密度逐渐得到提升,高空长航时太阳能无人机即将迎来让“能源”飞的工程应用阶段,全面实现高空长航时设计指标。
1.2 高空长航时太阳能无人机的设计特点分析
高空长航时太阳能无人机作为一种临近空间飞行平台,为了满足其高空长时间驻留的设计指标,其气动、结构等设计要求比常规飞机更为苛刻,并要求各个系统同时具有极低的能耗和极高的效率,具有低结构面密度、低翼载荷、低功重比、低雷诺数、大展弦比、高升阻比等总体气动设计特点。
一般把全机结构重量与机翼参考面积的比值定义为结构面密度,全机重量与机翼参考面积的比值定义为平飞翼载荷。对比“Pathfinder”、“Zephyr 6”、“Heliplat”等高空长航时太阳能无人机,以及“Solar Impulse I”载人中空,典型常规燃油动力的高空长航时无人机“Global Hawk”的结构面密度和翼载荷,如图3和图4所示。太阳能飞机的结构面密度和翼载荷均小于全球鹰无人机结构面密度和翼载荷的5%;尽管两类飞机均以高空长航时最为设计目标,其设计特点却有显著的不同。
由于能量摄取方式及动力形式上的差异,全球鹰高空长航时无人机的设计飞行速度为马赫数0.6,而太阳能飞机的设计飞行速度一般非常低(小于马赫数0.1),导致太阳能飞机的翼载荷显著地小于常规燃油动力飞机“全球鹰”的翼载荷。另外,与常规动力高空长航时飞机相比,太阳能飞机需要相对较大的机翼面积铺设太阳能电池板,结构重量又必须尽可能的轻,导致其结构面密度和翼载荷也非常小,从而对机翼结构设计带来更为苛刻的限制。

图3 结构面密度对比Fig.3 Comparison of structural surface density

图4 平飞翼载荷对比Fig.4 Comparison of wing load for level flying
受限于二次电池的能量密度较低,一般需要装载较大重量的蓄电池以满足飞行需求,需要较高的气动效率、推进系统效率等尽可能地降低平飞需用功率。把平飞需用功率与飞机起飞重量的比值定义为功重比,则太阳能飞机与全球鹰无人机的功重比对比如图5所示。可以看出,太阳能飞机与全球鹰无人机相比,紧张的能源供给将对该类飞机造成非常严峻的设计约束。
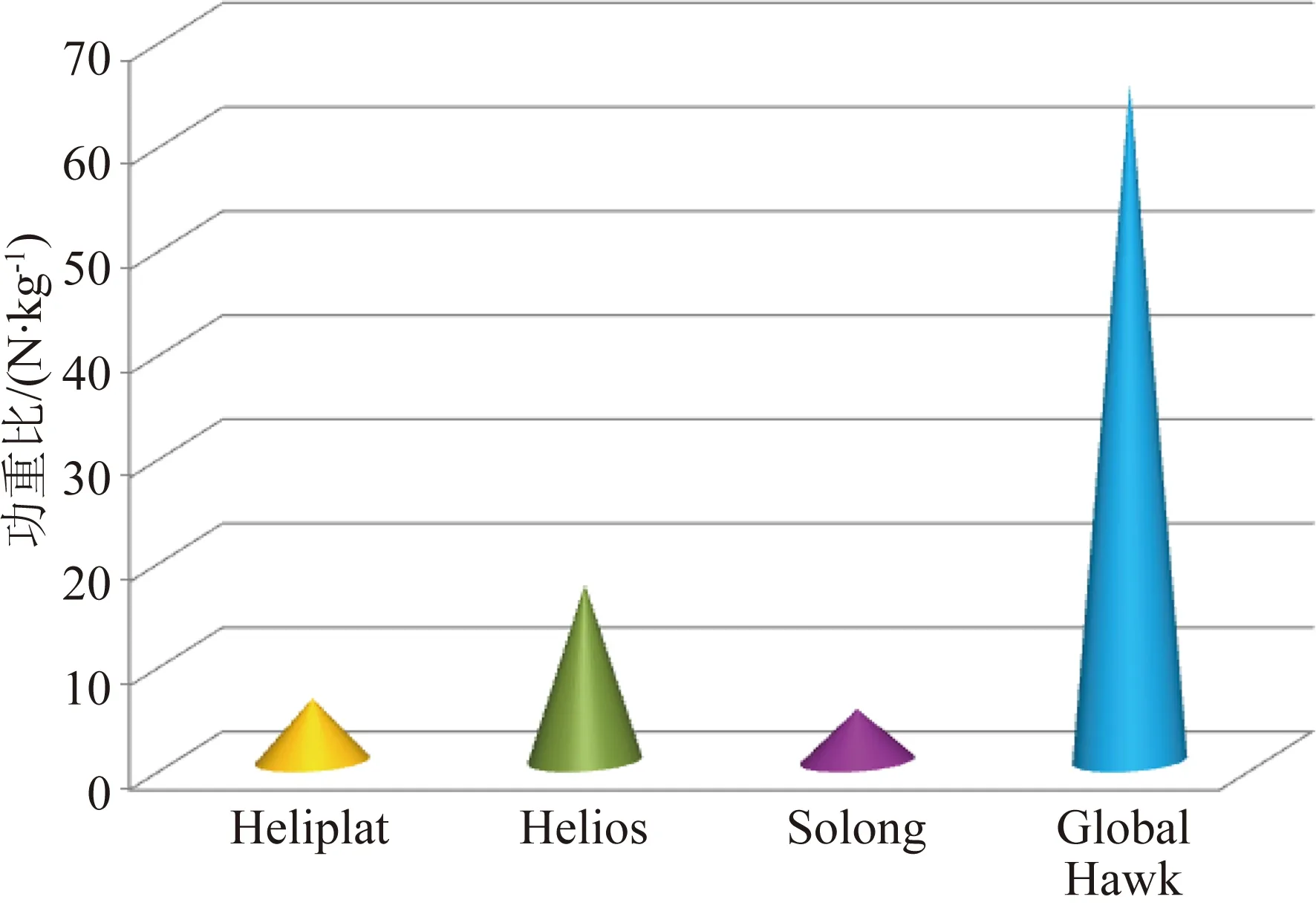
图5 平飞功重比对比Fig.5 Comparison of power-weight ratio
由于高空长航时太阳能飞机的设计飞行高度较高,设计飞行速度较低,导致该类飞机的气动设计具有典型的低雷诺数特征。对比海鸥、太阳能飞机、微型无人机、民航客机、战斗机的典型雷诺数(如图6所示),可以看出,太阳能无人机的雷诺数仅有20万左右,将对该类飞机的气动设计带来一些新的挑战,后文中将进一步详细阐述。
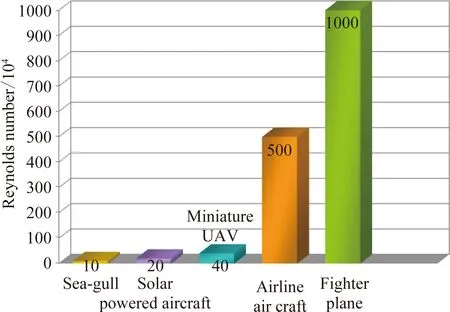
图6 雷诺数对比Fig.6 Comparison of Reynolds number
受限于紧张的能源平衡约束,为了达到高空长航时的设计要求,需要尽可能地提高太阳能飞机的气动效率。针对这一设计特点,太阳能飞机与全球鹰无人机采取了一致的措施,即通过增大机翼展弦比来降低诱导阻力,从而提高巡航升阻比。图7和图8中分别给出了一些太阳能飞机与全球鹰无人机的升阻比和展弦比对比关系。
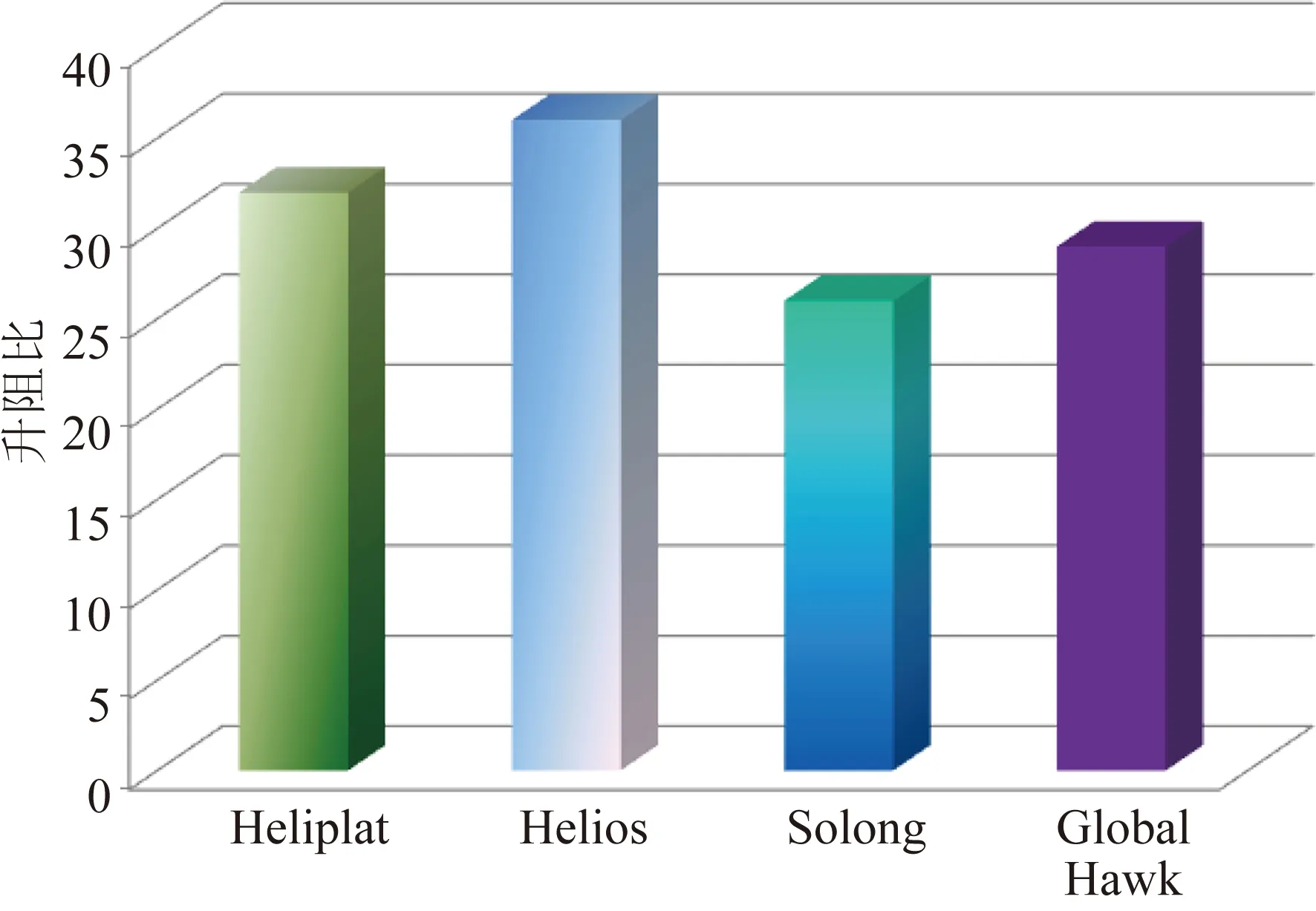
图7 巡航升阻比对比Fig.7 Comparison of lift-drag ratio
2 高空长航时太阳能无人机的低雷诺数气动力设计
高空长航时太阳能无人机飞行高度较高、飞行速度低,巡航飞行环境中大气较为稀薄,使得该类飞机具有典型的低雷诺数气动力设计等特点,流场具有层流分离、转捩和湍流再附等低雷诺数流场典型的流动特征,对该类飞机的高效气动力设计带来了严峻的挑战。另外,在该类飞机总体设计时,又要求具有较高的巡航升阻比,使得高效低雷诺数气动力设计技术成为关乎该类飞机设计成败的关键技术之一。
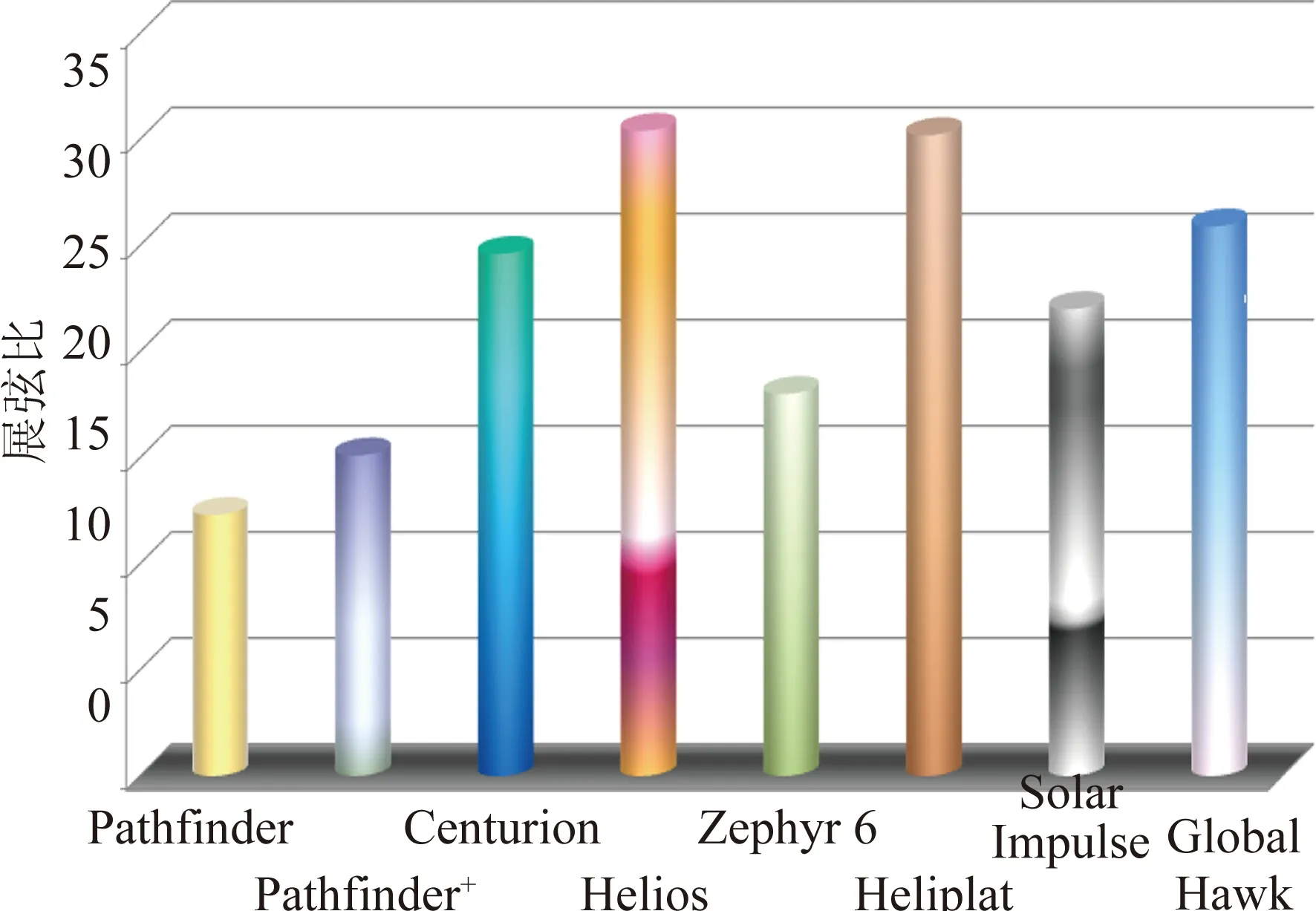
图8 展弦比对比Fig.8 Comparison of aspect ratio
2.1 高空长航时太阳能无人机低雷诺数翼型气动力数值模拟
层流向湍流转捩和层流分离泡的预测是高空长航时太阳能无人机低雷诺数气动力数值模拟的关键技术之一。在低雷诺数状态下,层流分离剪切层出现转捩时,将转变为湍流并且出现流动再附,形成层流分离泡,从而显著地影响翼型及全机的气动性能。如果预测的转捩点位置偏前或滞后,则分离泡的再附点也将偏前或滞后,进而预测的层流分离泡将偏小或偏大,显著地影响表面压力分布和摩擦阻力系数,从而影响对气动力和流场的预测。因此,对转捩位置的判断将直接影响计算结果的准确性。目前主要的转捩预测方法有四种:1) 由Smith、Gamberoni[25]和Van Ingen[26]提出的基于小扰动理论和线性稳定性理论的eN半经验方法;2) 求解抛物型稳定性方程(PSE)方法[27-28];3) 直接数值模拟(DNS)和大涡模拟(LES)[29-30];4) 基于Reynolds 平均Navier-Stokes方程(RANS)湍流模型的方法。由于计算机容量和计算速度的限制,直接数值模拟和大涡模拟均难以在短时期内进入工程实用阶段,目前低雷诺数气动力数值模拟主要是在雷诺平均方程的基础上,借助适当的湍流模型来实现[31]。
针对翼型和机翼的低雷诺数气动数值模拟研究,Somers等[32]使用Eppler翼型设计分析软件和基于eN转捩预测方法与边界层耦合数值求解方法的XFOIL软件[33],对6个典型低雷诺数翼型的气动性能进行了理论分析,给出了翼型的典型低雷诺数效应。张强等[34]数值模拟了E387翼型的低雷诺数非定常气动特性,对SSTk-ω湍流模型、代数B-L模型和层流的计算结果作了比较,湍流模型计算时采用固定点转捩,分析了转捩判断对低雷诺数气动计算的影响,研究了分离泡的不稳定性及周期性变化。白鹏等[35]对低雷诺数下E387翼型上表面后缘的长层流分离泡现象进行了非定常数值模拟,研究了层流分离的非定常特性、涡脱落的周期性过程及其对气动力造成的影响,并分析了雷诺数和迎角对分离泡形态的影响。关键等[36]使用Spalart-Alllnaras、SSTk-ω、Realizablek-ε三种湍流模型对E387翼型低雷诺数绕流流场进行了数值模拟,参考风洞试验数据评估三种模型的模拟能力,采用基于Michel的转捩判据后,能够更准确地计算出阻力、预测出层流分离泡。Karasu等[37]使用SSTk-ω湍流模型、k-kL-ω转捩模型和SST转捩模型研究了低雷诺数下NACA2415翼型的层流分离泡,与风洞试验数据对比表明,转捩模型比湍流模型更适合于层流分离泡和低雷诺数流动的预测。成婷婷等[38]使用SST转捩模型在NACA0012翼型上验证了其具有较好的转捩预测能力,并对使用粗糙带的翼型气动特性进行了研究。Sahin等[39]采用直接数值模拟方法,对低雷诺数下E387翼型和机翼进行了时间相关的非定常计算,得到包括压力、升力和阻力系数的瞬态和时均化气动参数,与试验数据进行对比,并比较了二维和三维流动的差异。
周洲[40-41]等以高空长航时太阳能无人机为研究背景,对低雷诺数翼型E387和FX 63-137使用多种转捩模型和湍流模型,开展了较为系列的研究;并参照风洞试验结果,对比分析了常用转捩模型对两种翼型的升阻力和层流分离泡的预测能力,为太阳能无人机低雷诺数气动数值模拟方法提供了较好的工程应用参考。选择eN转捩预测方法(XFOIL)、k-kL-ω转捩模型、γ-Reθ t转捩模型对E387和FX63-137翼型(如图9所示)的升力、阻力、俯仰力矩进行计算,结果如图10所示。

图9 E387与FX 63-137外形对比Fig.9 Configuration of E387 and FX 63-137
两种翼型表面层流分离泡位置随迎角变化情况如图11所示,其中LS表示层流分离,TR表示湍流再附,NT表示自然转捩。
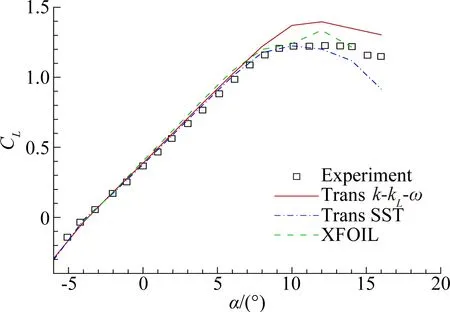
(a) E387 CL-α
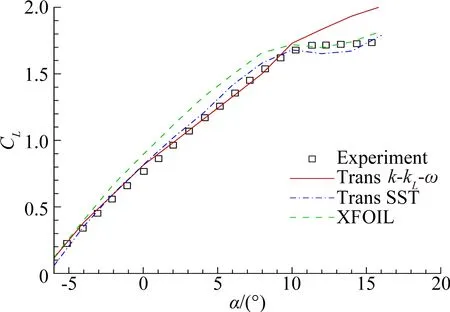
(b) FX 63-137 CL-α
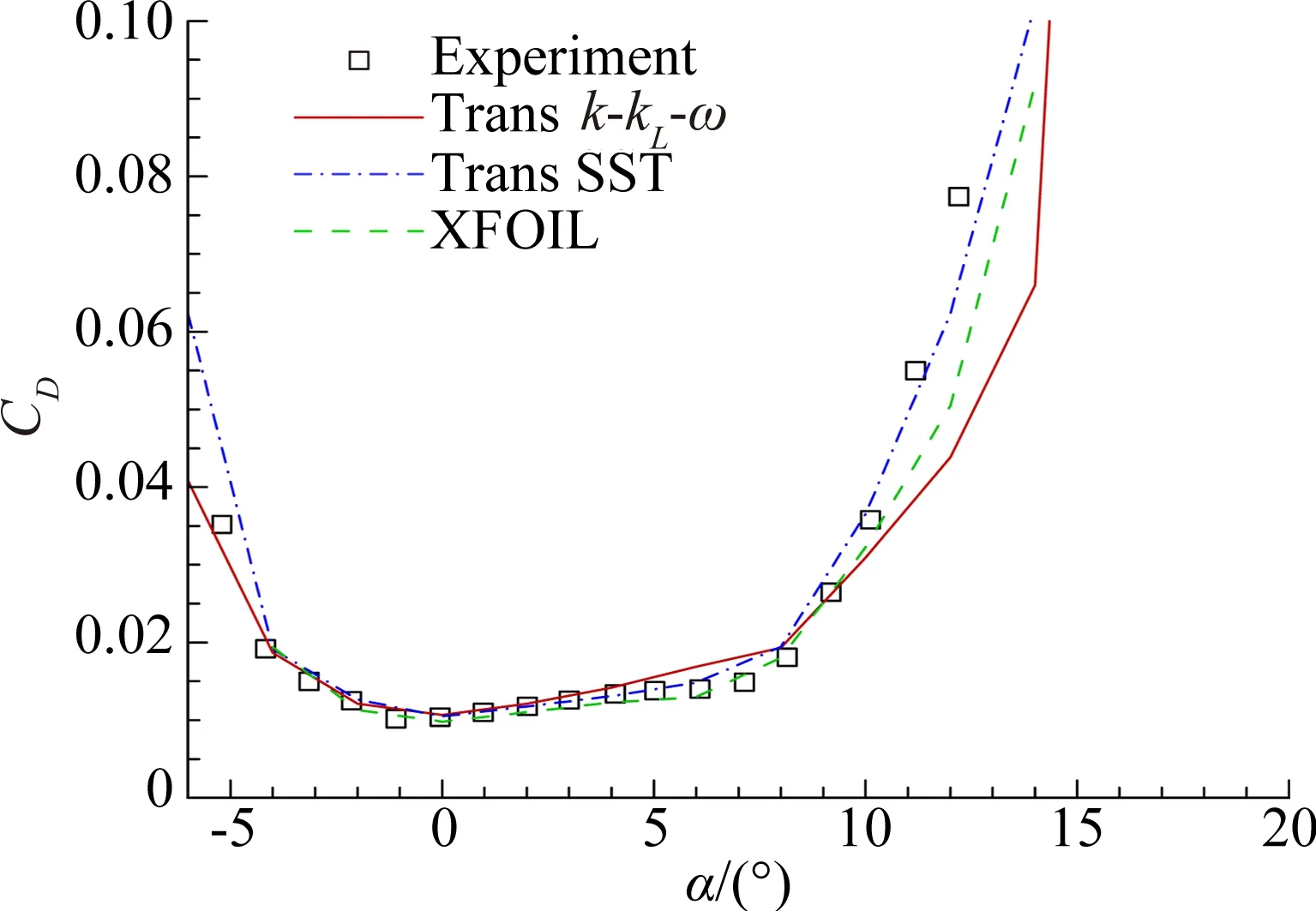
(c) E387 CD-α

(d) FX 63-137 CD-α
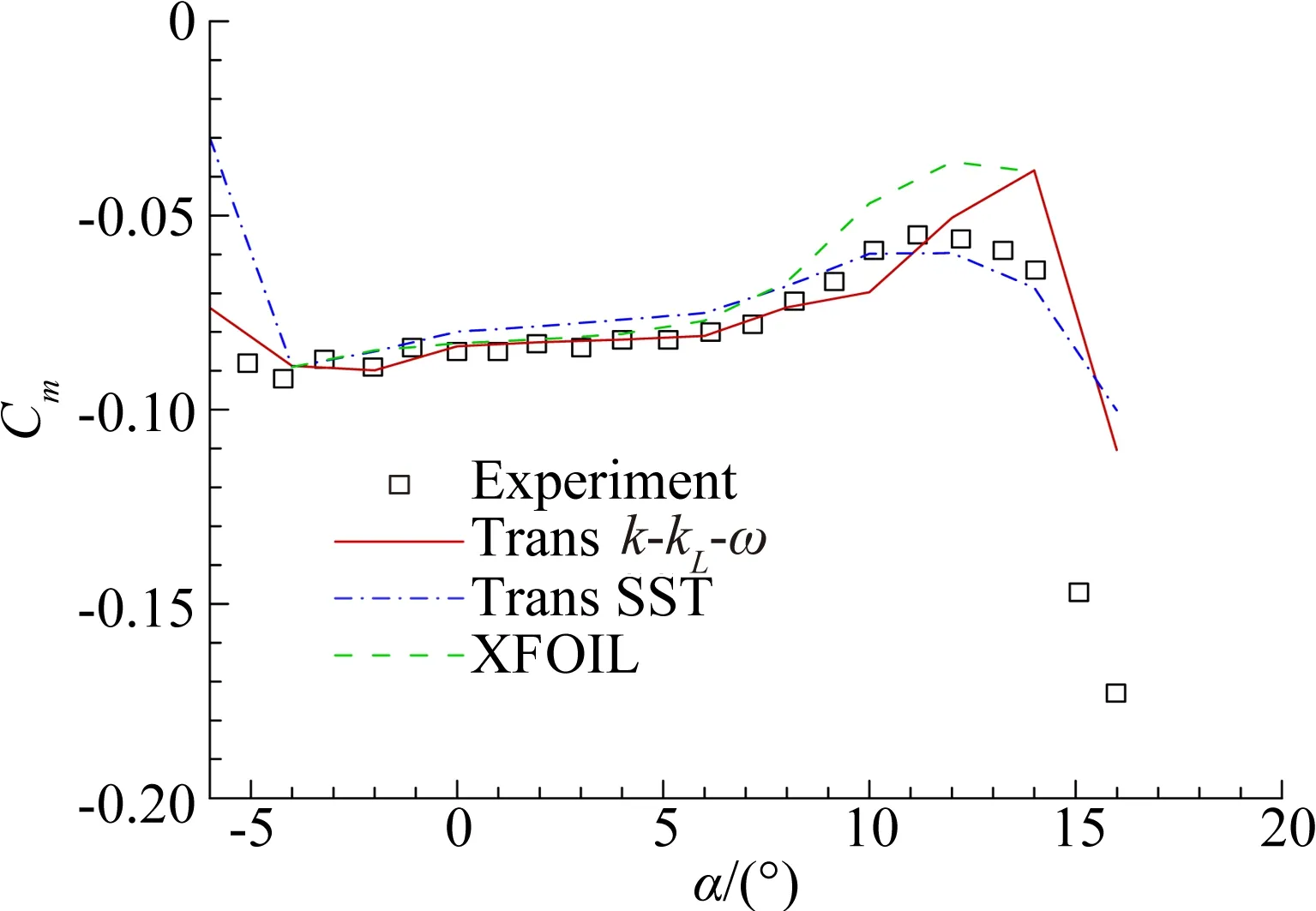
(e) E387 Cm-α
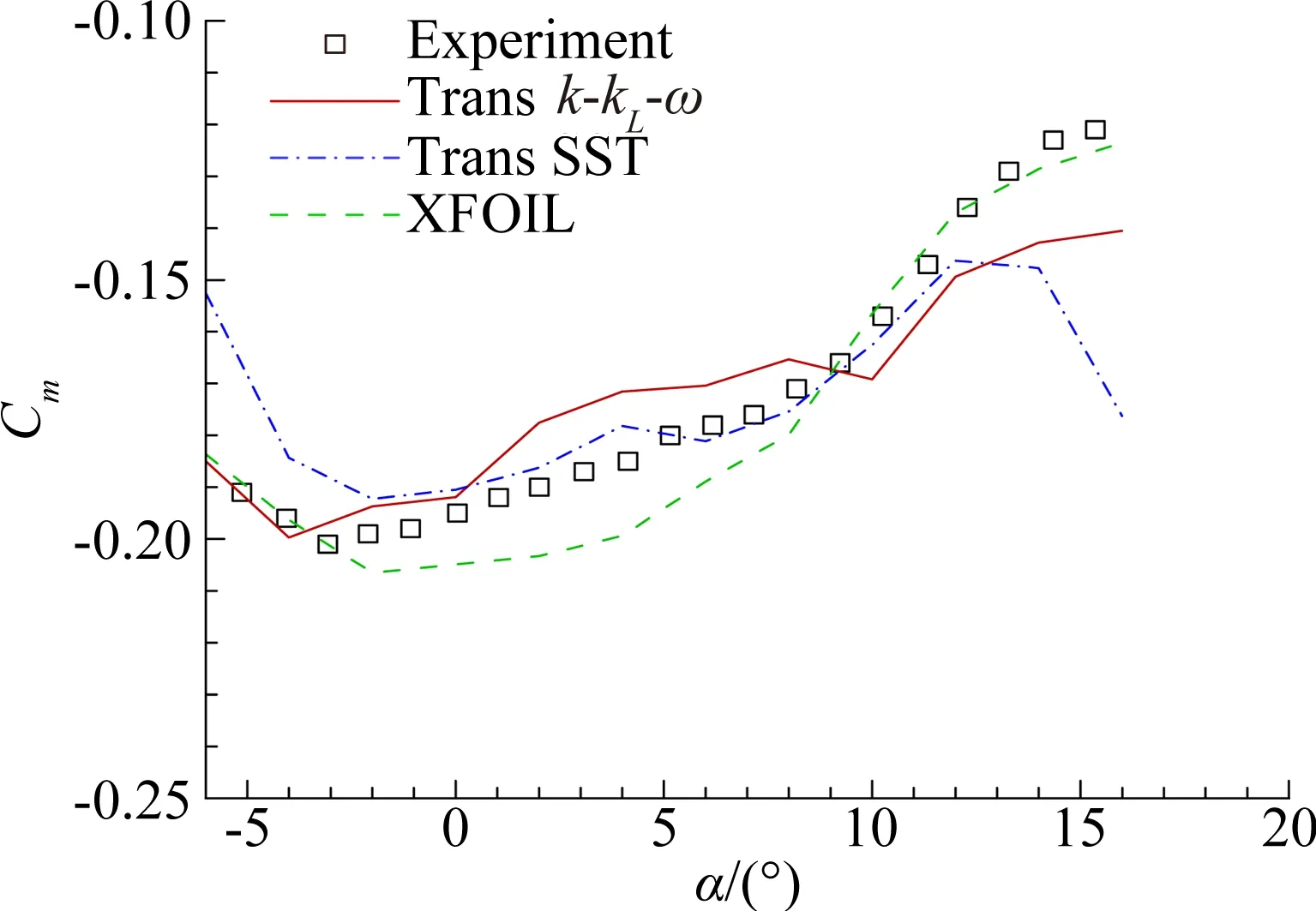
(f) FX 63-137 Cm-α
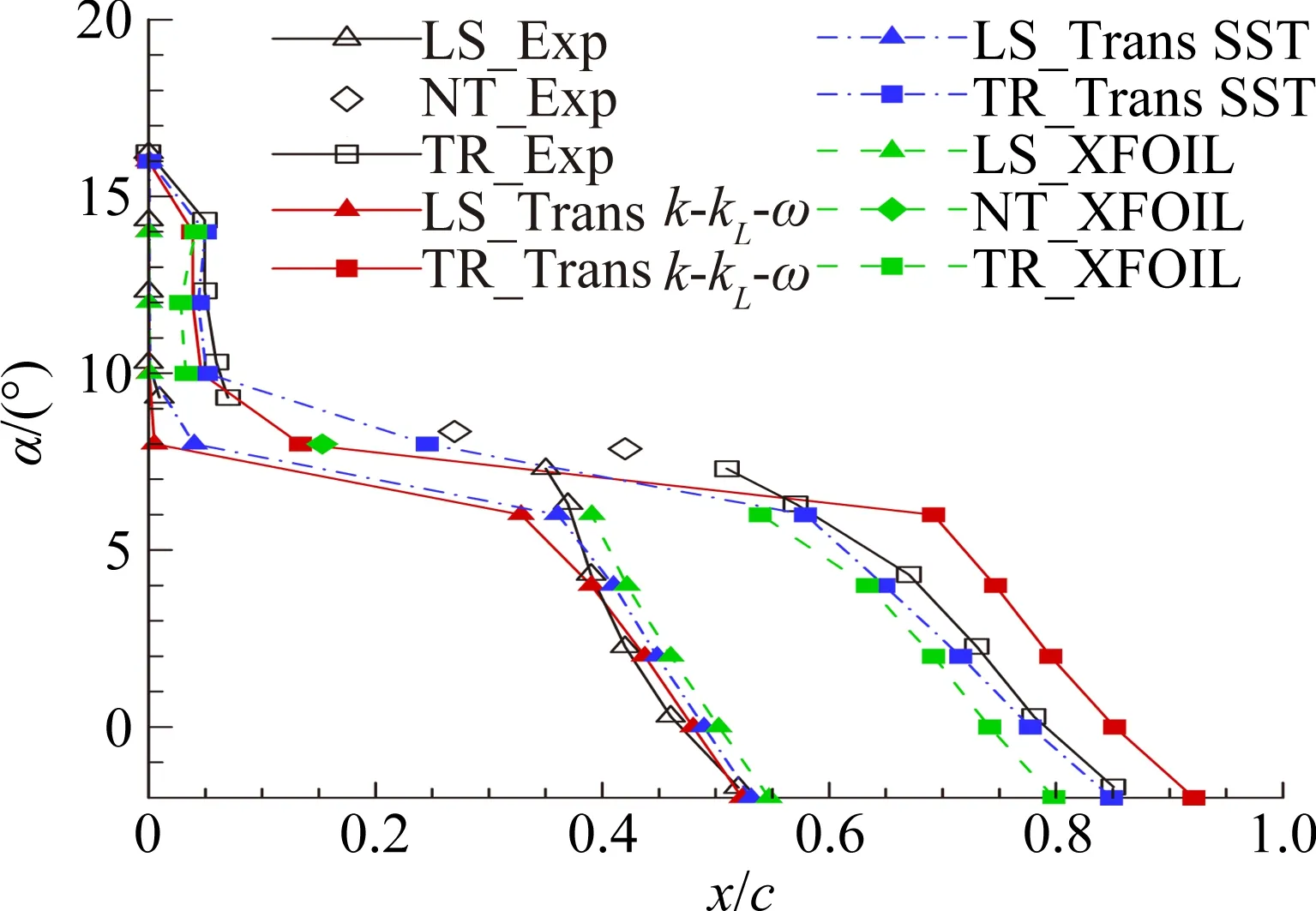
(a) E387

(b) FX 63-137
采用eN转捩预测方法能够比较准确地计算出中小迎角下的气动力系数,在大迎角失速情况下难以收敛;k-kL-ω转捩模型比较准确地计算出中迎角下的气动力系数,在大迎角下计算的升力偏大、阻力偏小,其预测的层流分离泡偏大;SST转捩模型在整个迎角范围内都能比较准确地计算出气动力系数和层流分离泡,考虑到低雷诺数流动大多情况都存在分离流转捩而不是自然转捩,更适合用于高空长航时太阳能无人机的低雷诺数气动数值模拟。
仍以E387和FX 63-137翼型为例,选取五个不同的雷诺数——6×104、1×105、2×105、3×105和5×105,基本覆盖了高空长航时太阳能无人机飞行的低雷诺数范围,研究翼型气动性能随雷诺数的变化特点,进行雷诺数效应分析。计算得到两个翼型的气动力特性随雷诺数变化如图12所示。
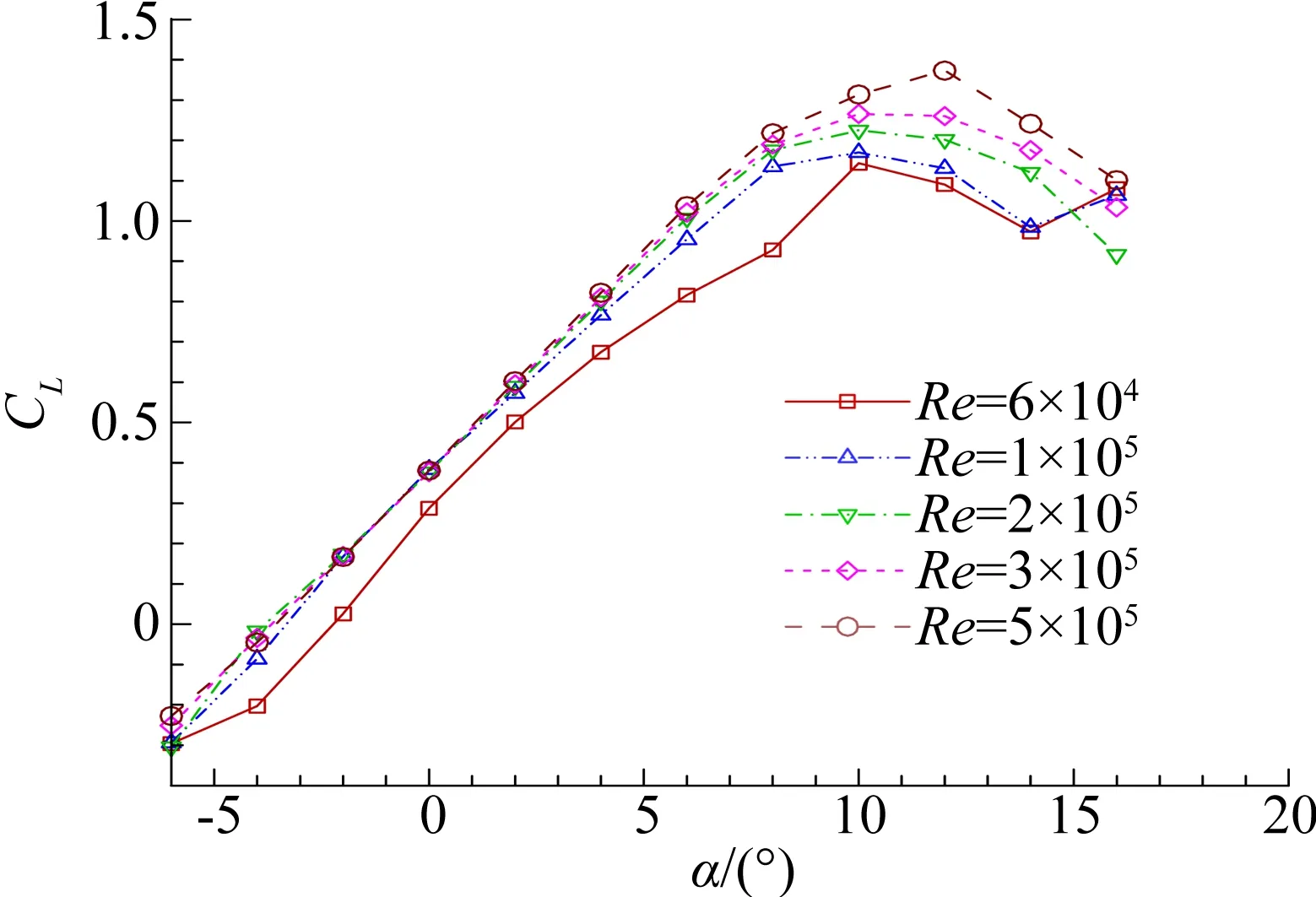
(a) E387 CL-α
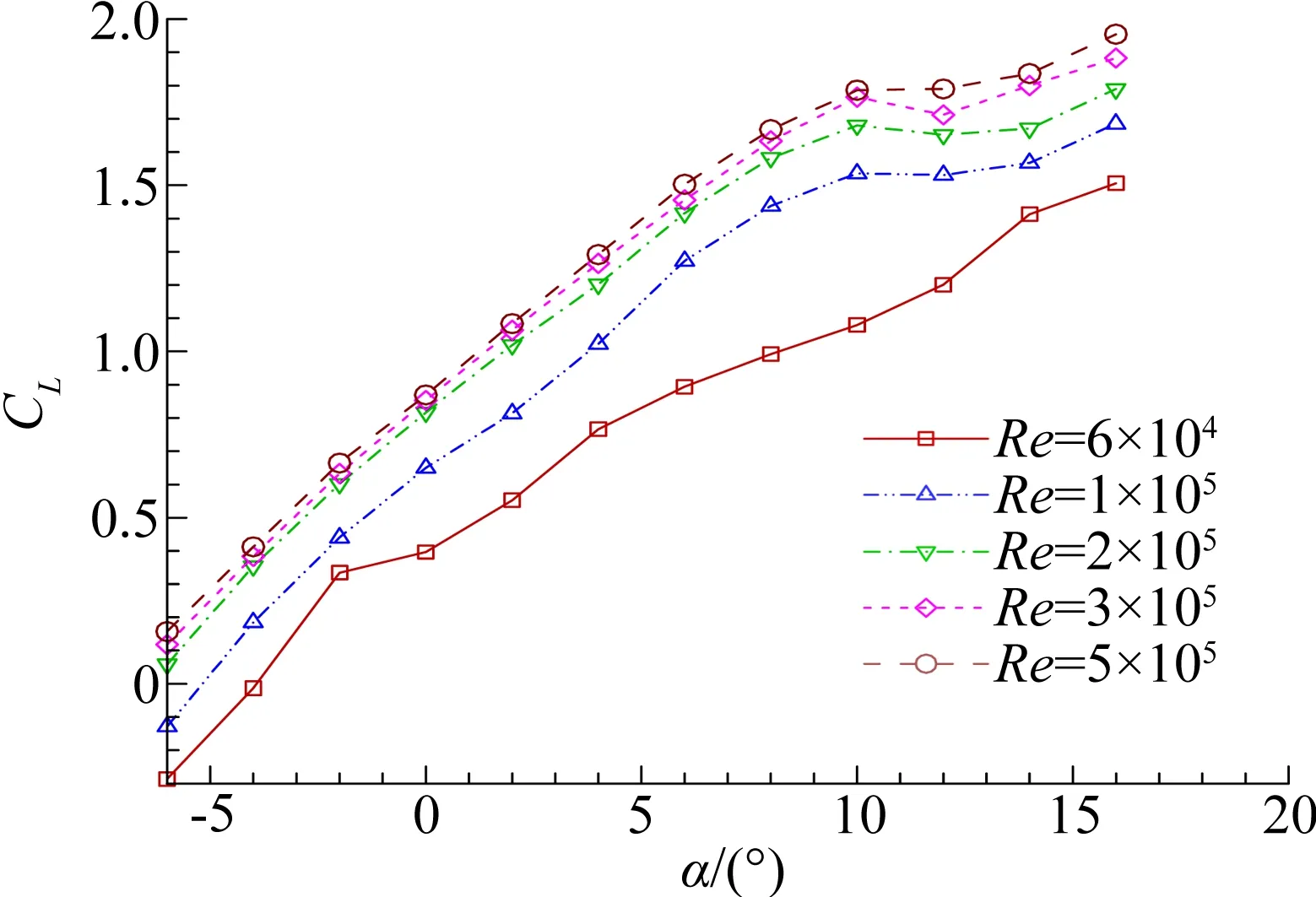
(b) FX 63-137 CL-α
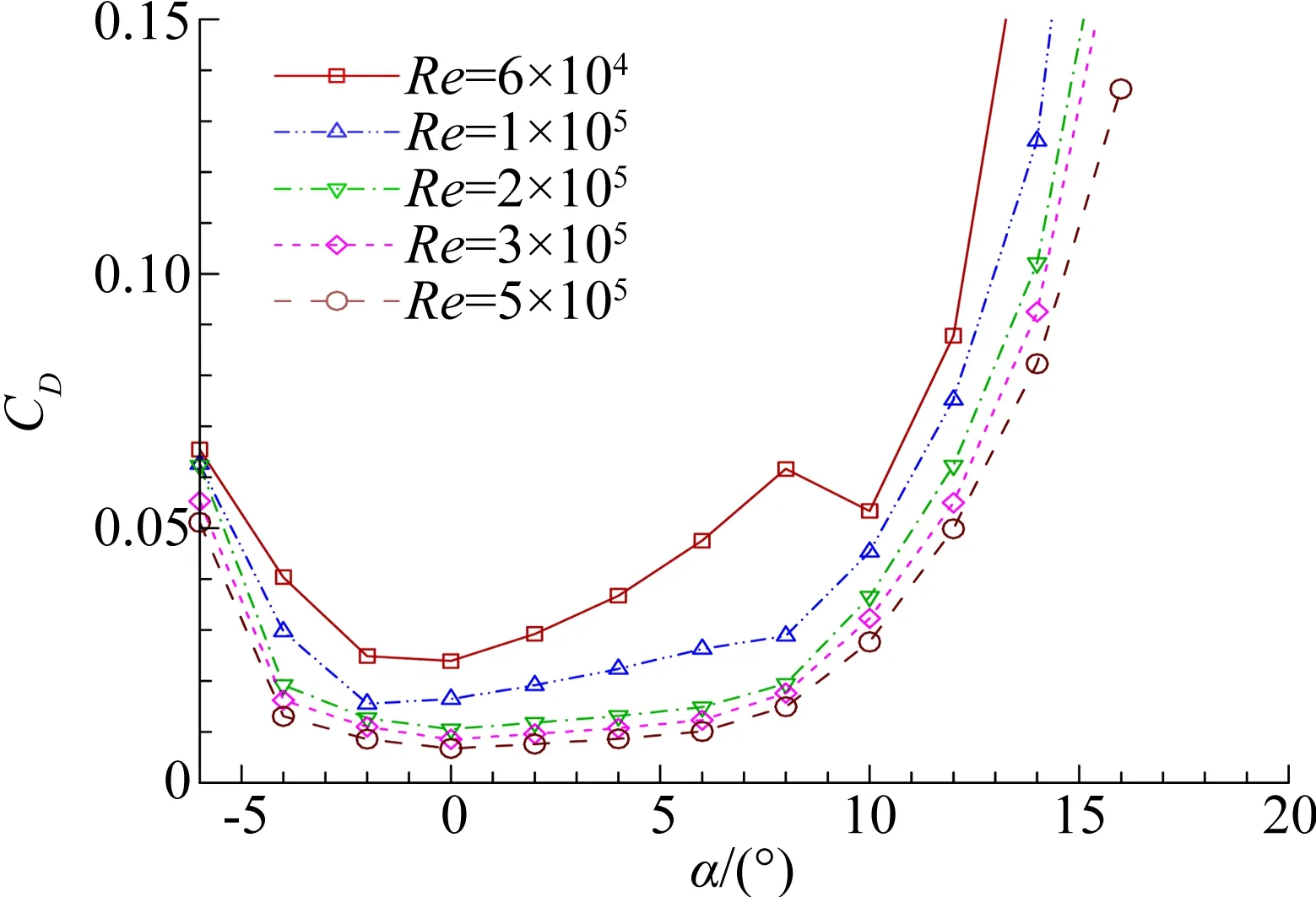
(c) E387 CD-α
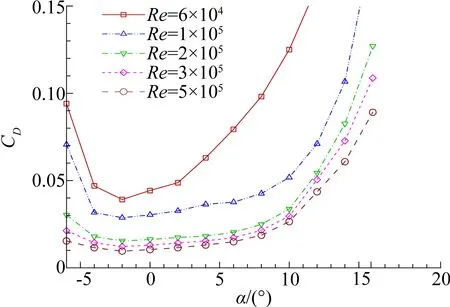
(d) FX 63-137 CD-α
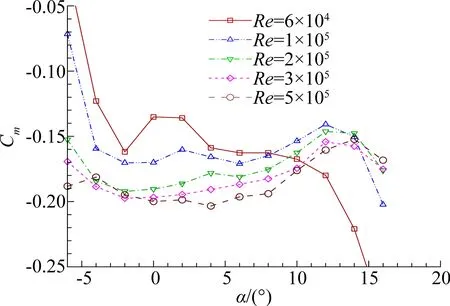
(f) FX 63-137 Cm-α

(g) E387 K-α
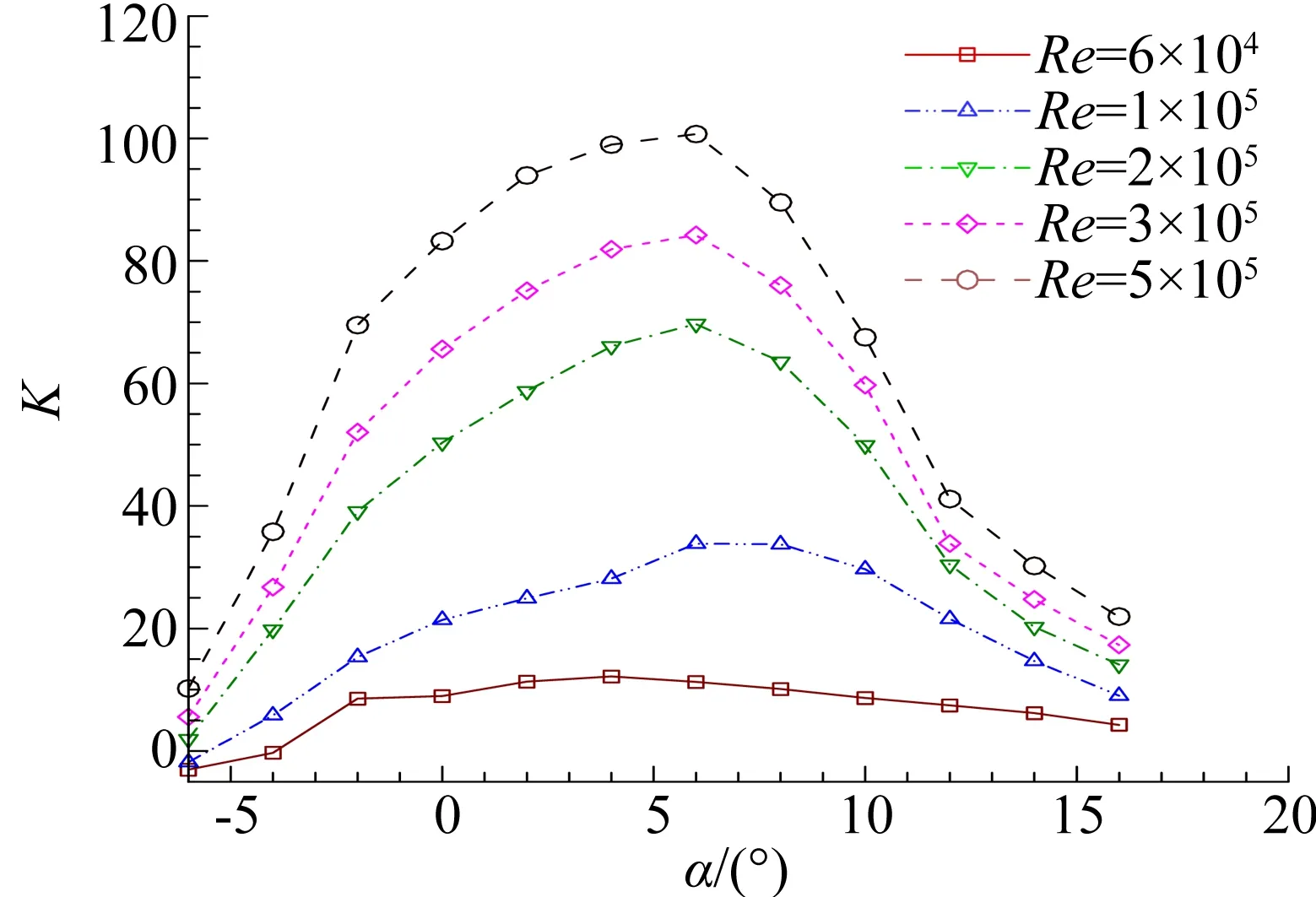
(h) FX 63-137 K-α
由图12和图13中的计算结果可以看出,随着雷诺数减小,层流分离泡增大,升力减小,阻力增大,气动性能呈现出显著地恶化。在Re=6×104时,两个翼型流动在层流分离后没有在翼型表面形成湍流再附,气流完全分离,造成升力很小,阻力很大,气动性能严重恶化,并且升力系数曲线不再保持线性;其中E387在10°~12°迎角出现了湍流再附,形成完整的层流分离泡,这时阻力显著减小,形成升阻比最大的峰值,并且由于后部湍流附着流动改变了压力分布,这时低头力矩显著减小。在Re=1×105时,E387翼型在迎角-2°以及FX 63-137在迎角6°以下仍然只有层流分离,没有湍流再附,但在更大迎角下出现了湍流再附,形成层流分离泡。由于在Re=1×105时出现层流分离泡和附着流动,翼型上表面形成吸力峰,其气动性能较在Re=6×104时的气动性能有很大改善。随着雷诺数增加,层流分离点后移,湍流再附点前移,层流分离泡变小,升力增大,阻力减小,气动性能改善。E387在Re=1×105以上,FX 63-137在Re=2×105以上时,随着雷诺数增加,小迎角下的升力增大程度很小,但大迎角下升力增大程度明显,这是因为增加雷诺数减小了后部的湍流分离。两个翼型在较低雷诺数时,最大升阻比对应的迎角随雷诺数增加而减小,但在较高雷诺数时,最大升阻比对应的迎角变化较小。E387除了在Re=6×104由于层流分离改变压力分布而引起力矩系数变化较大外,随雷诺数增加其力矩系数变化较小;FX 63-137除了在Re=6×104时大迎角下出现很大的低头力矩外,随雷诺数增加而产生更大的低头力矩。

(a) E387

(b) FX 63-137
HELIPLAT[8]太阳能无人机机翼采用的低雷诺数翼型为HPF118翼型,如图14所示。在文献[8]中,Romeo给出了不同雷诺数下,HPF118翼型的升阻特性,如图15所示,并指出在高空长航时太阳能无人机的气动设计时,需要着重考虑其低雷诺数气动效应所引起的气动特性恶化现象。

图14 HPF118 翼型Fig.14 HPF118 airfoil

图15 HPF118翼型升阻特性Fig.15 Aerodynamics of HPF118 airfoil
2.2 低雷诺数对高空长航时太阳能无人机气动特性的影响
高空长航时太阳能无人机在总体气动设计时,要求较高的升阻比,而低雷诺数效应将显著地恶化翼型的气动特性,进而会显著地削弱全机升阻比,从而不利于该类飞机的总体气动设计。目前,关于低雷诺数效应对翼型气动特性的影响研究工作比较多,但针对高空长航时太阳能无人机的三维全机气动特性研究,相对要少得多。西北工业大学周洲[42-43]等以全翼式太阳能无人机(如图16所示)为研究背景,研究了雷诺数对该类飞机气动特性的影响。
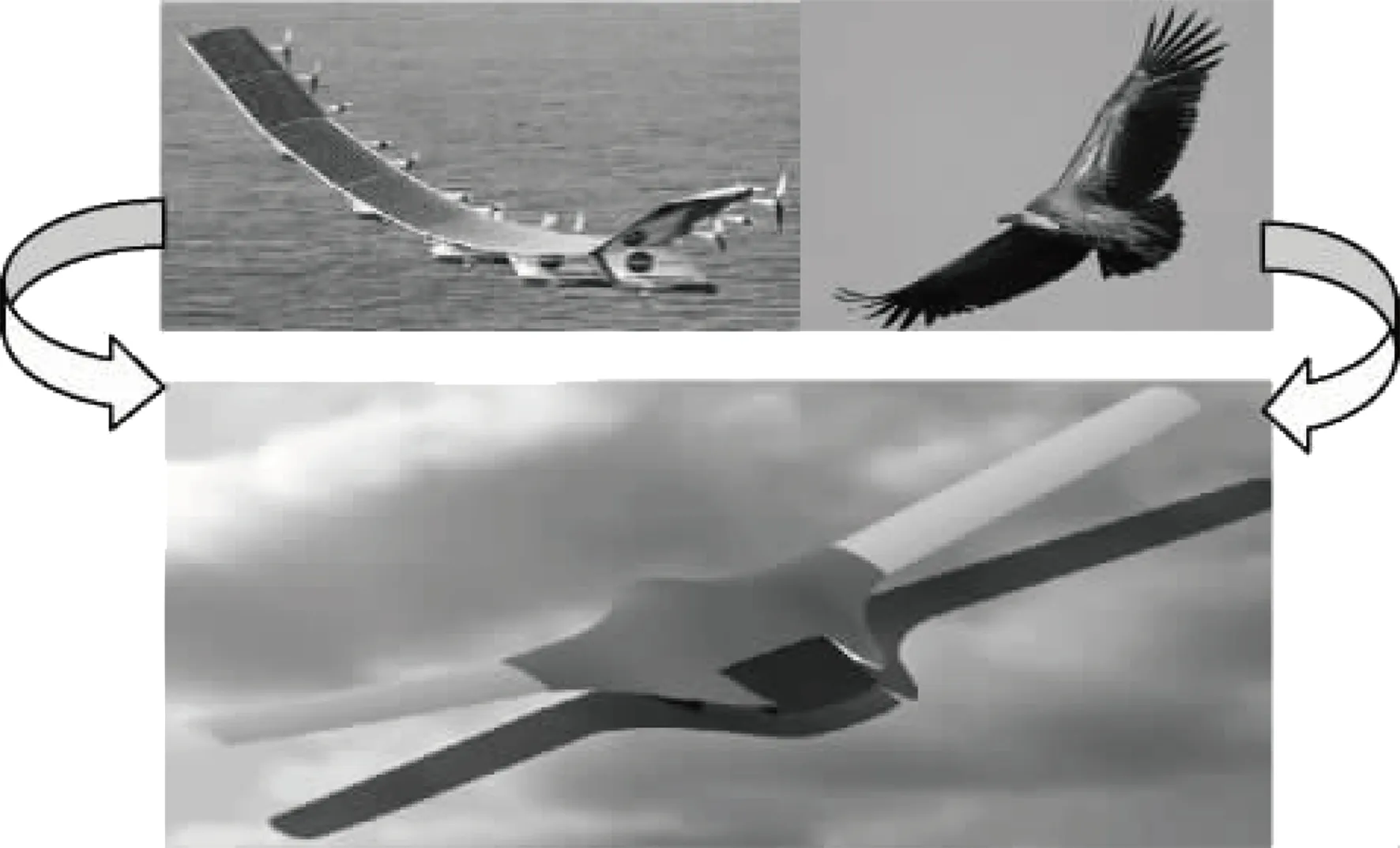
图16 某仿生全翼式太阳能无人机Fig.16 Bionic full wing solar powered UAV
选取Re=1.5×105、2.6×105和4×105等三个低雷诺数计算状态,计算得到的全机气动特性如图17所示。
随着雷诺数的降低,升力系数略有减小,阻力系数增大,使得最大升阻比产生显著地下降(最大升阻比由Re=4×105时的36.4降低到Re=1.5×105时的30.3),从而将显著地削弱其长航时巡航性能,需要引起设计者的特别注意。

(a) CL~α
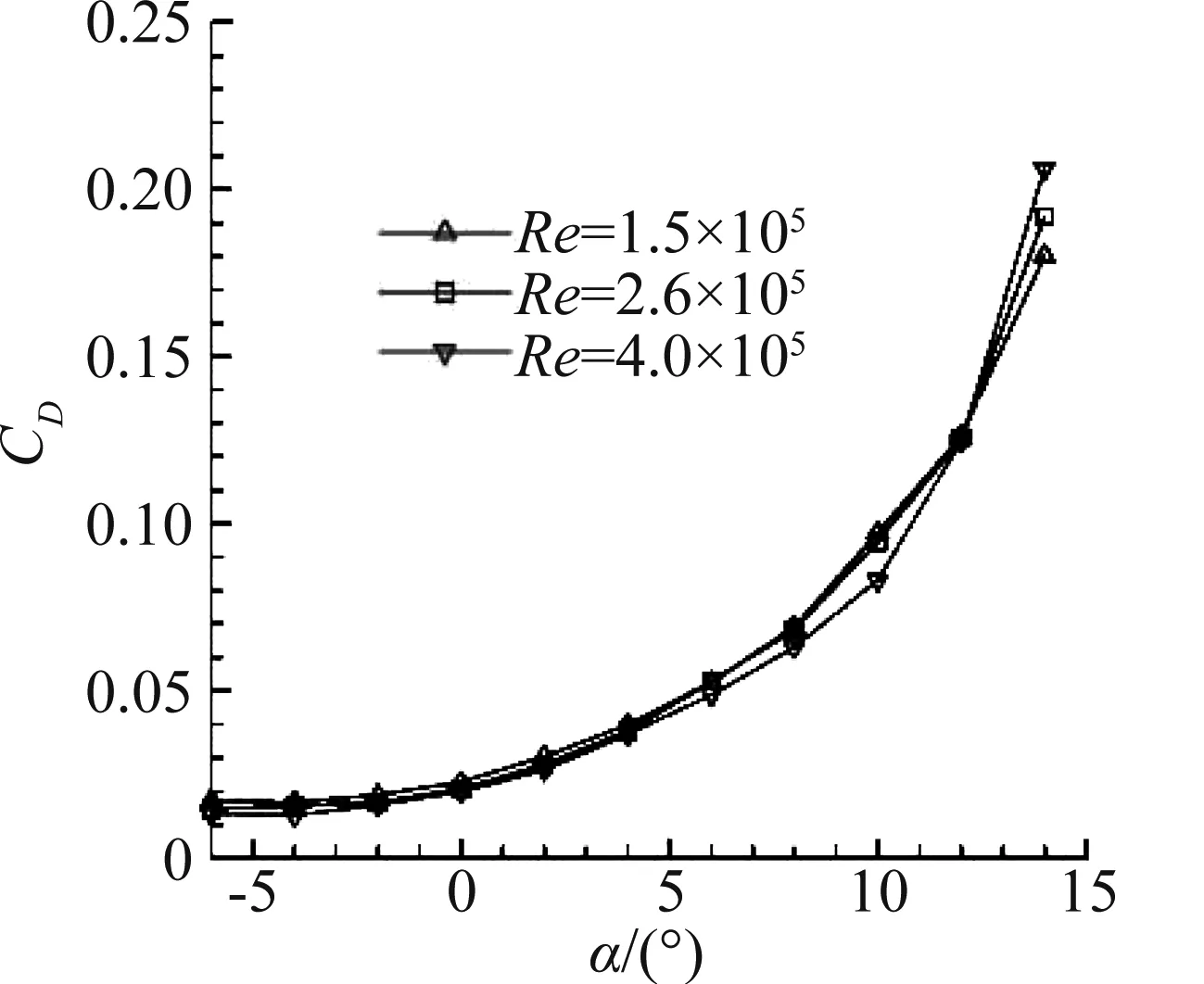
(b) CD~α
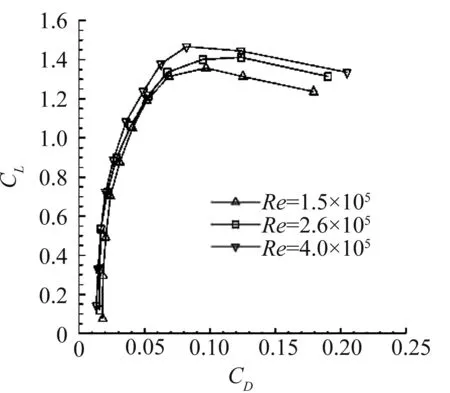
(c) CL~ CD
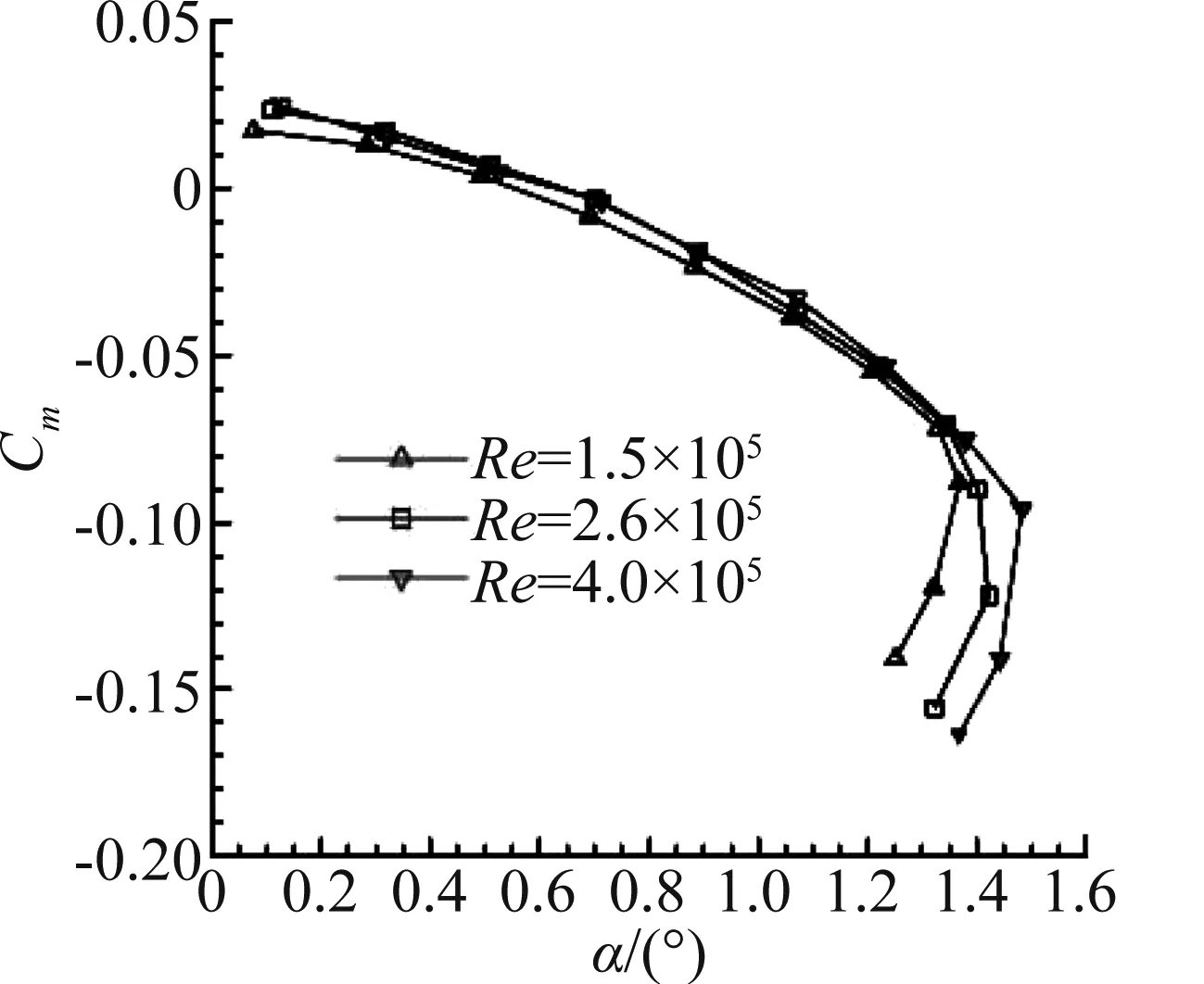
(d) Cm~α
3 弹性变形对高空长航时太阳能无人机气动特性的影响
受光伏能源转换效率及二次电池能量密度低的限制,高空超长航时太阳能无人机一般采用大展弦比大柔性机翼设计思想,在气动载荷的作用下允许机翼产生较大的弯曲变形,以尽可能减轻结构重量,同时改善飞机飞行性能。太阳能无人机的大展弦比、轻质结构的设计特点使其在飞行中产生明显的机翼结构静变形,如“探路者”太阳能无人机平飞时机翼上翘量超过半展长的12%,“太阳神”飞机的机翼上反角最大可达到50°(极限飞行状态下) ;“太阳神”太阳能无人机的展弦比达到了31,结构面密度为3.2 kg/m2,而常规动力的高空长航时无人机“全球鹰”的展弦比为25,机翼结构面密度却达到53 kg/m2。较大的弹性变形,使得线弹性理论中的小变形假设不再成立,若仍坚持使用线弹性结构模型求解这类飞机的静气动弹性问题,甚至会得到相反的结论,因此研究这类飞机的静气动弹性问题时需要考虑柔性机翼大位移、大转角等几何大变形特征的非线性效应[44-49]。
为了说明大柔性结构几何非线性变性特征,这里以一大柔性悬臂梁为例,悬臂梁一端固支约束,另一端受一集中作用弯矩M(单位为N·m),如图18所示,臂梁长度L=20 m,EIz=10 N·m2,EA=10 N,集中弯矩M分别取0.2π、0.4π、0.6π、0.8π和π。其解析解是弧长为20m的一圆弧,圆心角θ=0.4π、0.8π、1.2π、1.6π和2π[50-51]。
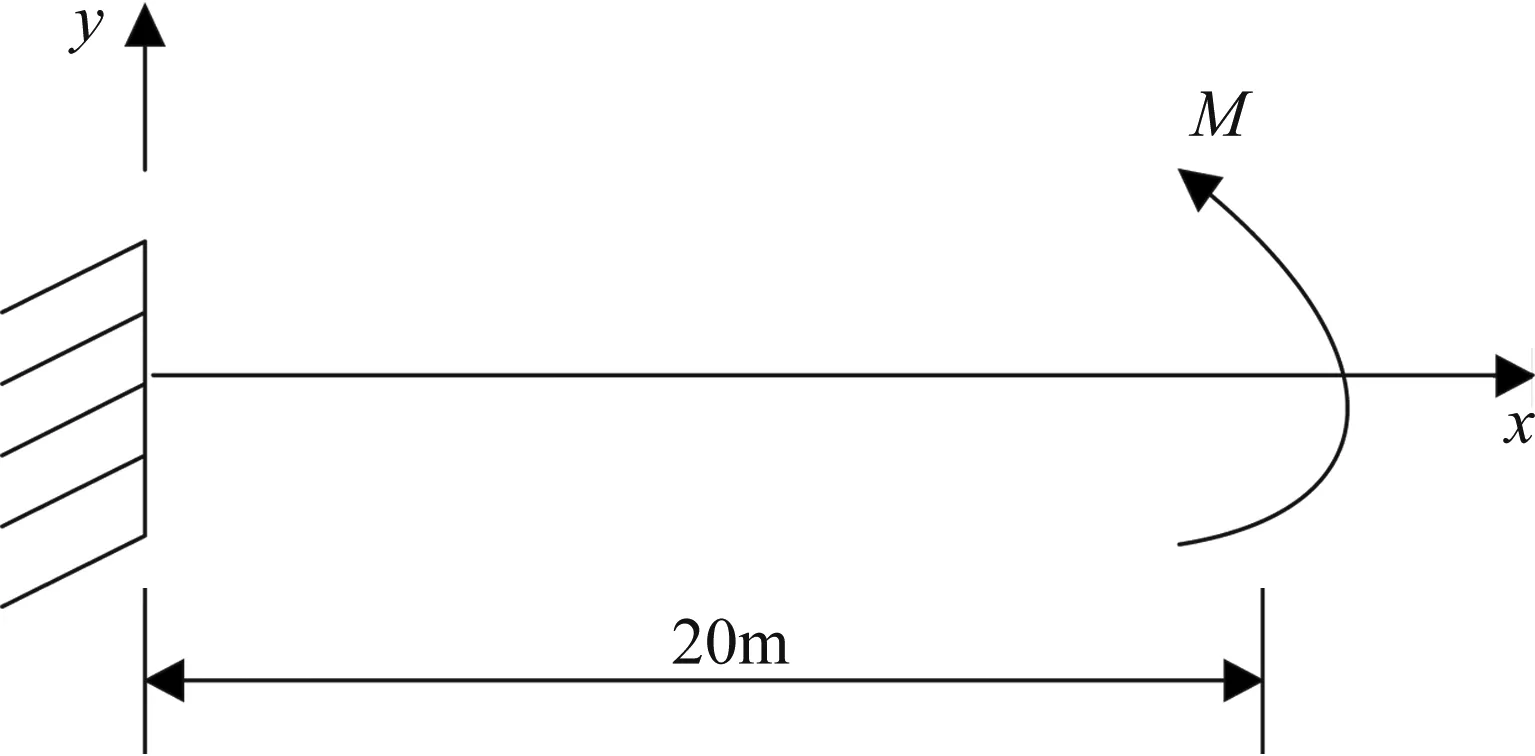
图18 悬臂梁端部受集中弯矩载荷作用示意图Fig.18 Cantilever beam under moment loading
王伟等[52]采用线性有限元理论和CR理论(共旋转有限元法)对该大变形问题分别进行了求解,并与线性理论解和非线性理论解进行了对比。线性理论计算结果如图19所示,随着载荷的增加,悬臂梁端部没有出现x方向的位移,y方向位移随载荷的增加而线性增大,显然不具有描述柔性结构几何大变形中刚体旋转部分的能力;采用非线性的CR理论的计算结果如图20所示,随着载荷的增加,大柔性悬臂梁逐渐变形成一个圆,较好地描述了刚体旋转运动和弹性变形。
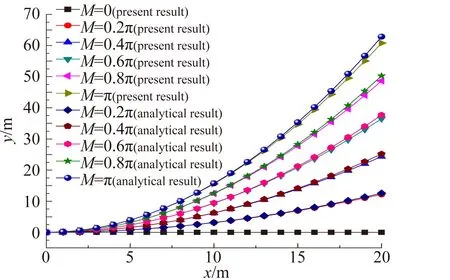
图19 线性解Fig.19 Linear results
目前,研究弹性变形对飞机气动特性的影响的主要途径之一是耦合计算结构力学(CSD)和计算流体力学(CFD)求解器进行迭代求解。Romeo[21]等基于线性结构力学求解技术及CFD技术,研究了HELIPLAT太阳能无人机的静气动弹性问题;Palacios[53]研究了大展弦比复合材料柔性机翼的非线性静气动弹性问题;Joseph等[54]基于风洞实验数据修正的气动力模型并结合CFD数值模拟技术,研究了ARW-2机翼的静气动弹性问题;马铁林[55]等耦合NASTRAN和FLUENT研究了大展弦比柔性前掠机翼的气动特性;范锐军[56]等研究了大展弦比柔性飞翼布局无人机的静气动弹性特性等;史爱明[57]等采用结构影响系数法耦合CFD求解器研究了弹性机翼的跨声速静气动弹性问题;成婉菊[58]等基于N-S方程开展了飞机静气动弹性计算方法方面的研究工作。
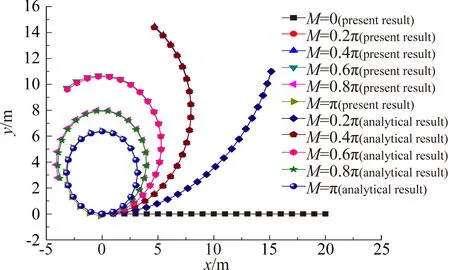
图20 非线性解Fig.20 Nonlinear results
与一般飞机的线性静气动弹性效应一致,大柔性太阳能无人机机翼结构的非线性静变形同样会影响气动载荷的重新分布及全机的纵向、横航向力和力矩特性,主要区别是研究较大弹性变形对无人机的气动特性(如升阻比、静稳定导数等)的影响时,需要考虑结构几何大变形效应,否则得到的结论是值得怀疑的。这里以某大柔性高空超长航时太阳能无人机为例,研究该无人机考虑几何非线性效应的静气动弹性响应特性,其外形、结构参数、几何尺寸如图21及表1所示。
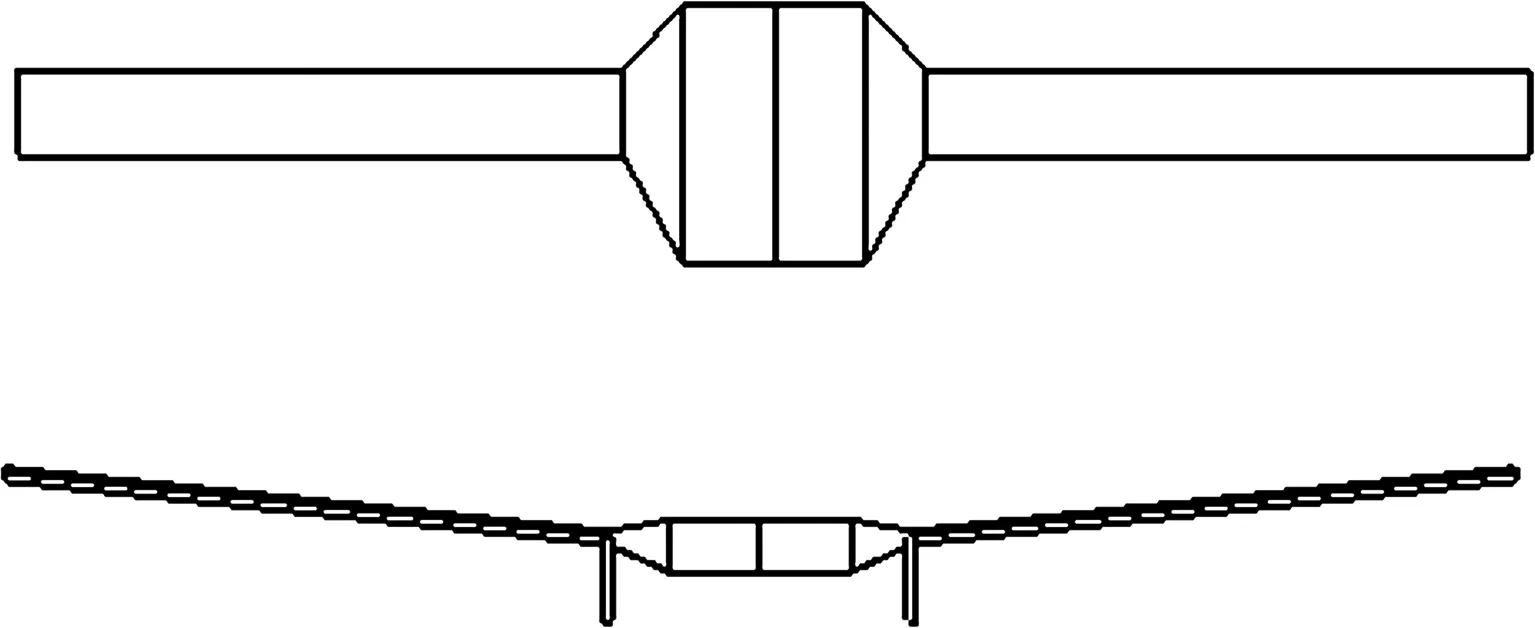
图21 算例飞机布局示意图Fig.21 Configuration of the research aircraft
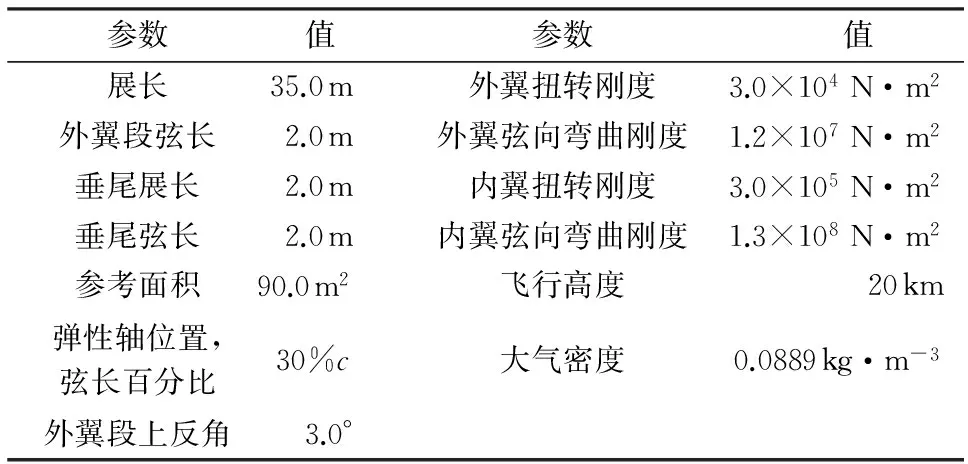
表1 柔性太阳能无人机模型参数Table 1 Model parameters of the flexible solar powered aircraft
假设无穷远来流速度为30 m/s、飞机迎角为0°,此时雷诺数为3.7267×105;假设机翼弯曲刚度沿翼展方向均匀分布,以弯曲刚度作为变量,研究给定飞行条件下无人机的静气动弹性响应特性;随后冻结弹性变形,研究各个弹性变形基准下无人机的全机气动特性。静气动弹性求解收敛后,翼尖弯曲变形随弯曲刚度变化的趋势如图22和图23所示。
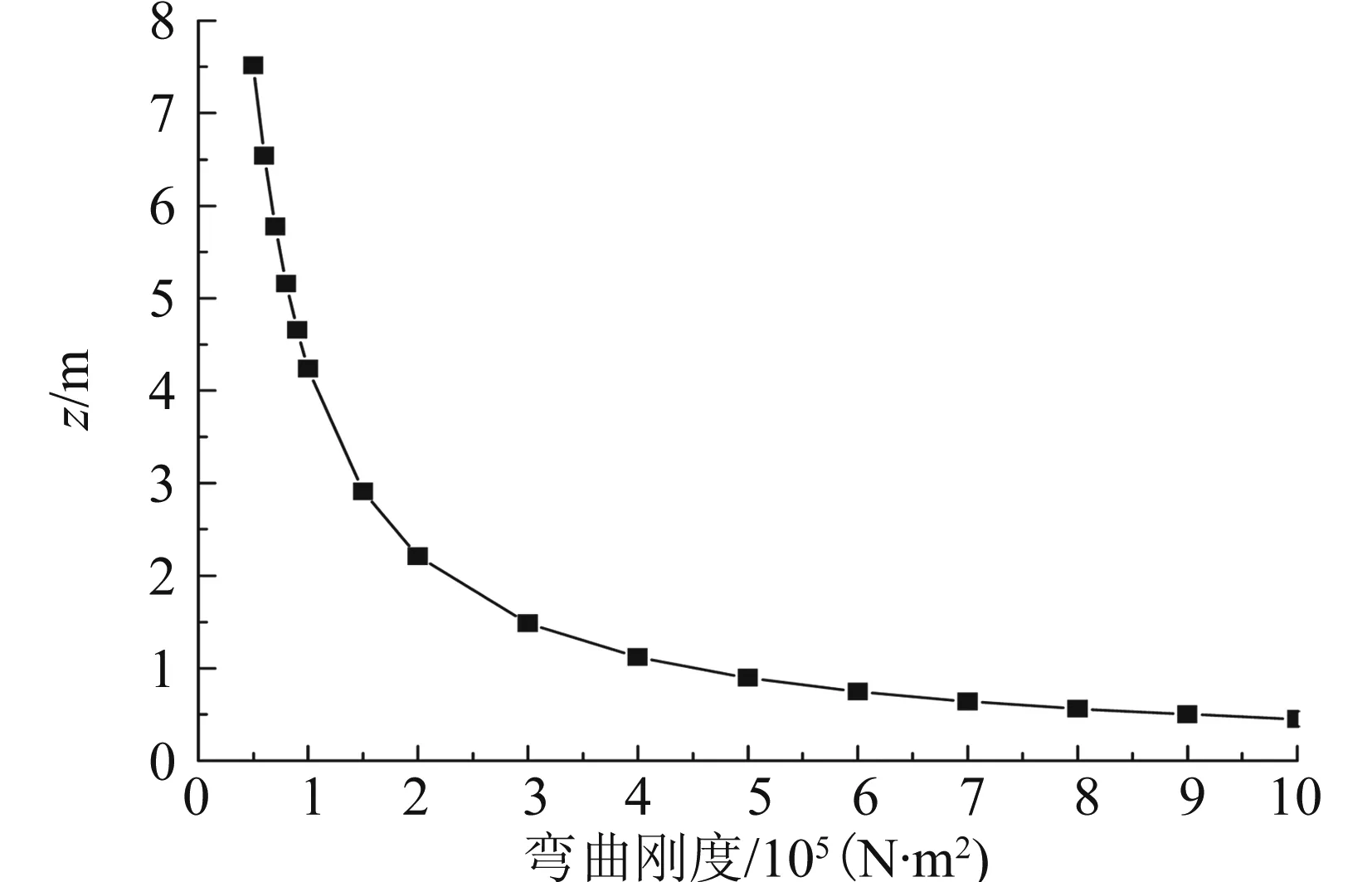
图22 翼尖弯曲位移曲线Fig.22 Bending displacement of the wing tip
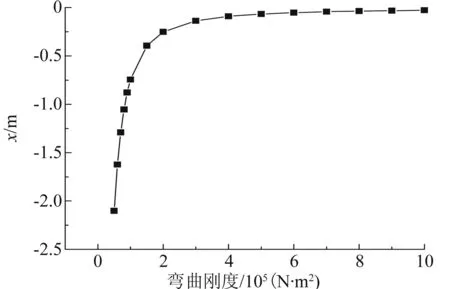
图23 翼尖展向位移曲线Fig.23 Spanwise displacement of the wing tip
从图22和图23中的计算结果中可以看出,随着弯曲刚度的减弱,翼尖弯曲变形和展向位移逐渐增加,并且增速越来越快。另外,当弯曲刚度大于5.0×105N·m2时,随弯曲刚度的增加,弹性变形降低的趋势越来越缓和,说明允许一定的变形可以大大降低对弯曲刚度的限制,从而有利于减轻结构重量。分别取弯曲刚度EI1=2.640×105N·m2、EI2=1.271×105N·m2、EI3=0.783×105N·m2、EI4=0.553×105N·m2为例,对应静气弹求解收敛时的翼尖弯曲位移为1.748 m(4.99%展长)、3.531 m(10.10%展长)、5.251 m(15.00%展长)、7.01 m(20.03%展长);随后冻结此外形,研究各个变形下的气动特性,以分析弹性变形对无人机气动特性的影响,此时各个变形状态下翼尖展向位移相当于缩短的有效展长为0.436 m(1.25%展长)、1.09 m(3.11%展长)、2.2 m(6.29%展长)、3.72 m(10.63%展长),上述各个弯曲刚度下的机翼静变形如图24所示。随着弯曲刚度的降低,机翼弯曲变形愈大,并且翼尖展向位移越来越大,机翼当地剖面的法向量与全机有效升力方向的夹角越来越大,特别是在靠近翼尖的区域。可见,随着弹性变形的增加,机翼气动载荷作用方向将发生较大改变,若仍采用常规的线弹性理论描述无人机机翼结构的静变形显然会引起较大的误差。
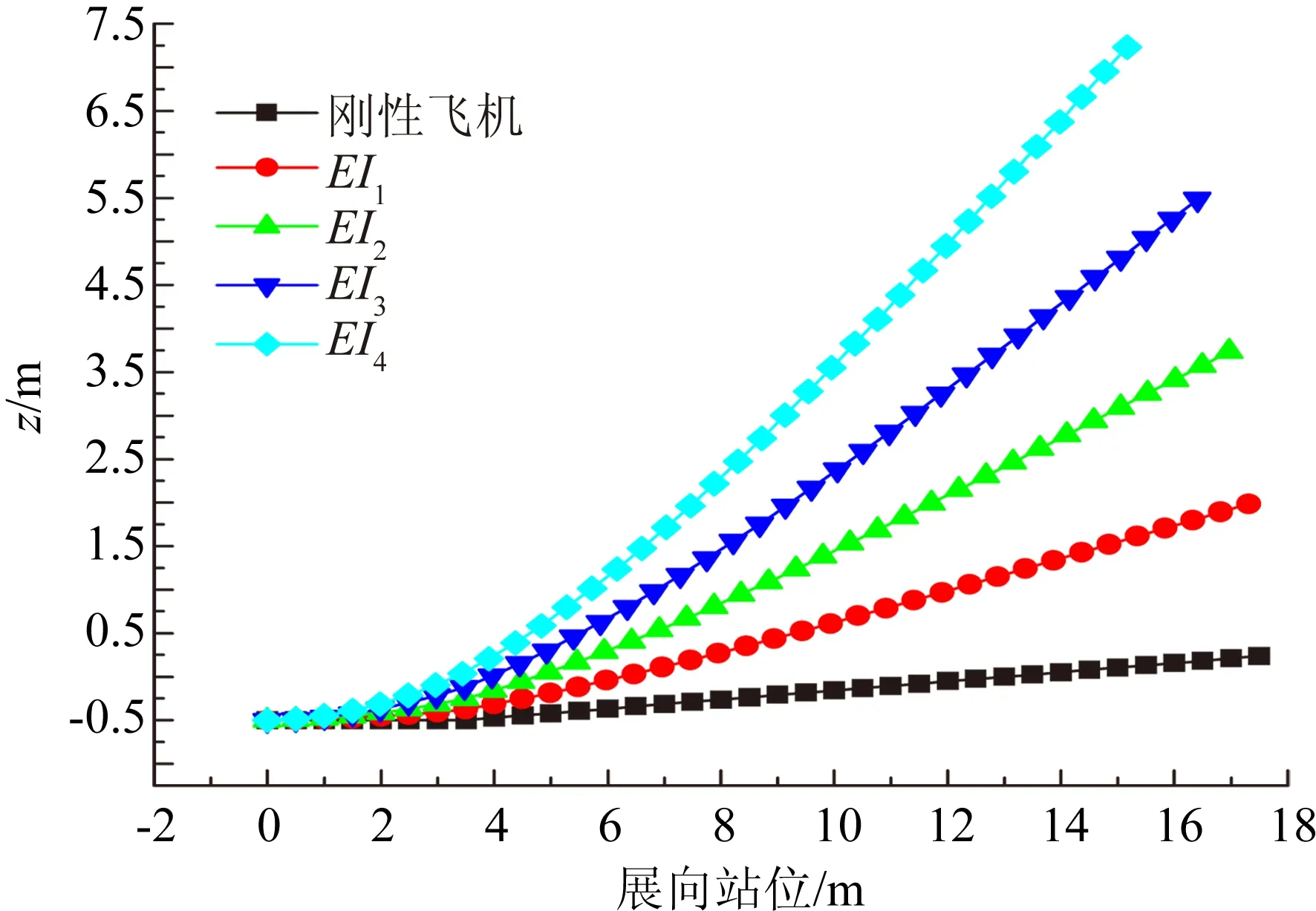
图24 柔性机翼变形分布图Fig.24 Deformation of the flexible wing
随着弯曲刚度的降低,机翼弹性变形愈加显著,局部气动载荷的作用方向亦发生较大改变,变形后飞机的气动特性研究对这类飞机的设计具有重要的参考价值。当地升力系数在展向的分布如图25所示,25%弦长处的压力分布如图26所示。
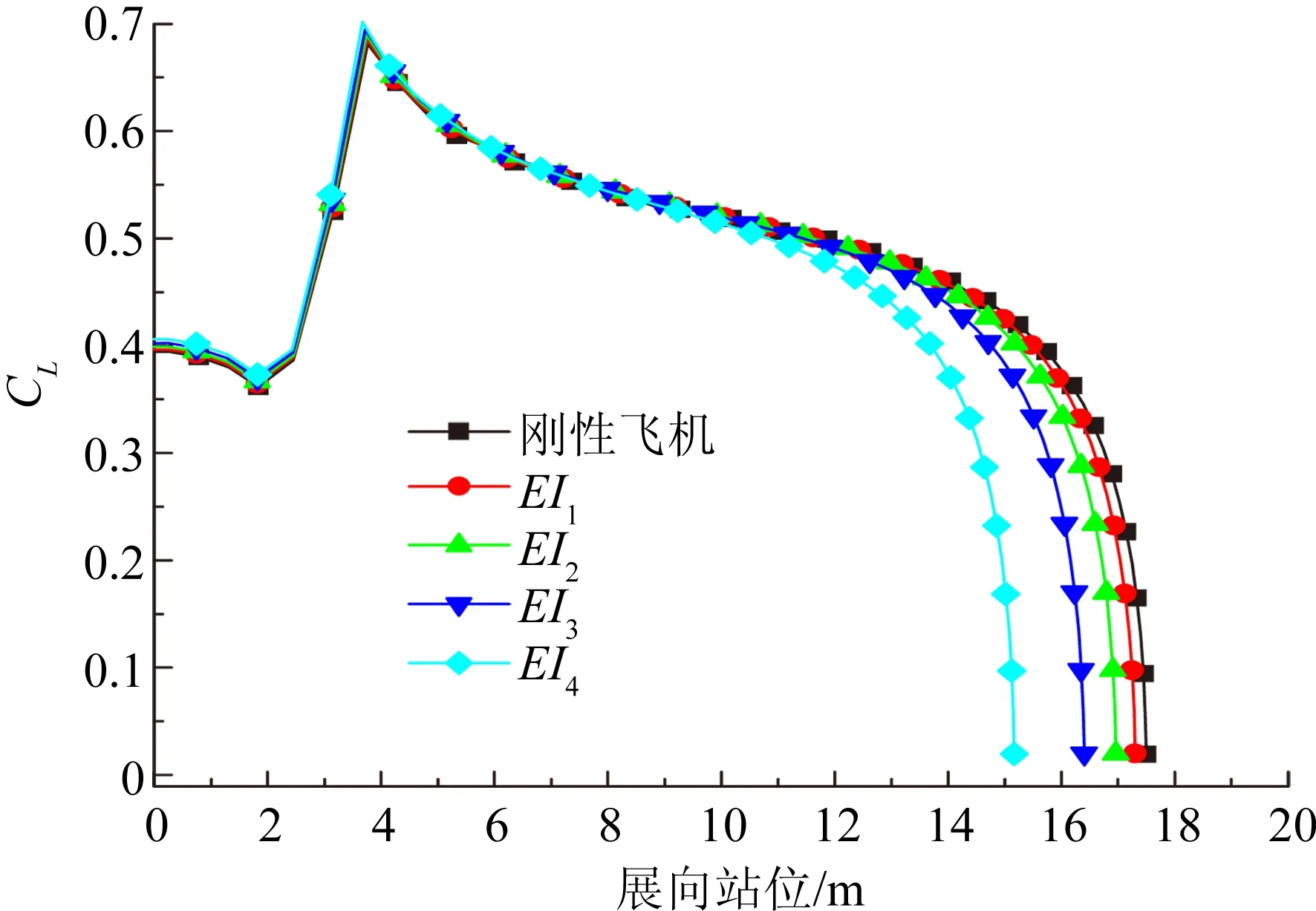
图25 展向升力分布Fig.25 Lift distribution along the span
不同的弯曲刚度状态下,静气动弹性求解收敛后,相距对称面展向站位分别为6 m、10 m、14 m处的翼剖面压力分布对比如图27至图29所示。随着弹性变形的增加,越靠近翼尖处的剖面上下表面压力差降低得越显著。翼尖弯曲位移小于展长的10%时,弹性变形对这类布局飞机的气动载荷影响较弱,此时弯曲刚度具有较大的设计空间;当翼尖弯曲变形更大时,弹性变形对气动载荷的影响需要着重注意。因此,对这类以柔性设计思想为主的飞行器,尽可能高精度地描述机翼几何非线性结构静变形,进而合理地预测变形后气动载荷的重新分布是这类飞机气动设计应考虑的主要因素之一。
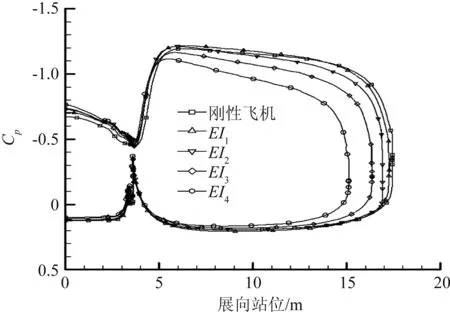
图26 25%弦长处展向压力分布Fig.26 Pressure distribution at 25% chord
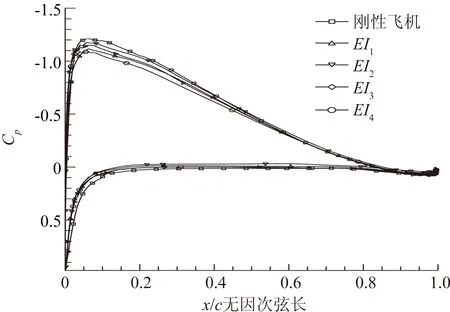
图27 y=6 m处弦向压力分布Fig.27 Pressure distribution at y=6 m
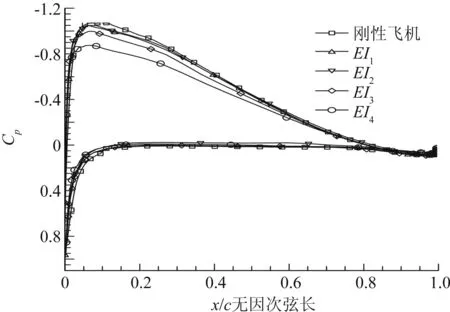
图28 y=10 m处弦向压力分布Fig.28 Pressure distribution at y=10 m
从图27至图29中的计算结果可以看出,弹性变形主要影响机翼上表面压力分布,对下表面压力分布的影响较弱。
考虑几何非线性效应的静气动弹性求解收敛后,冻结气动外形,研究弹性变形对全机气动特性的影响如图30至图32所示。

图29 y=14 m处弦向压力分布Fig.29 Pressure distribution at y=14 m
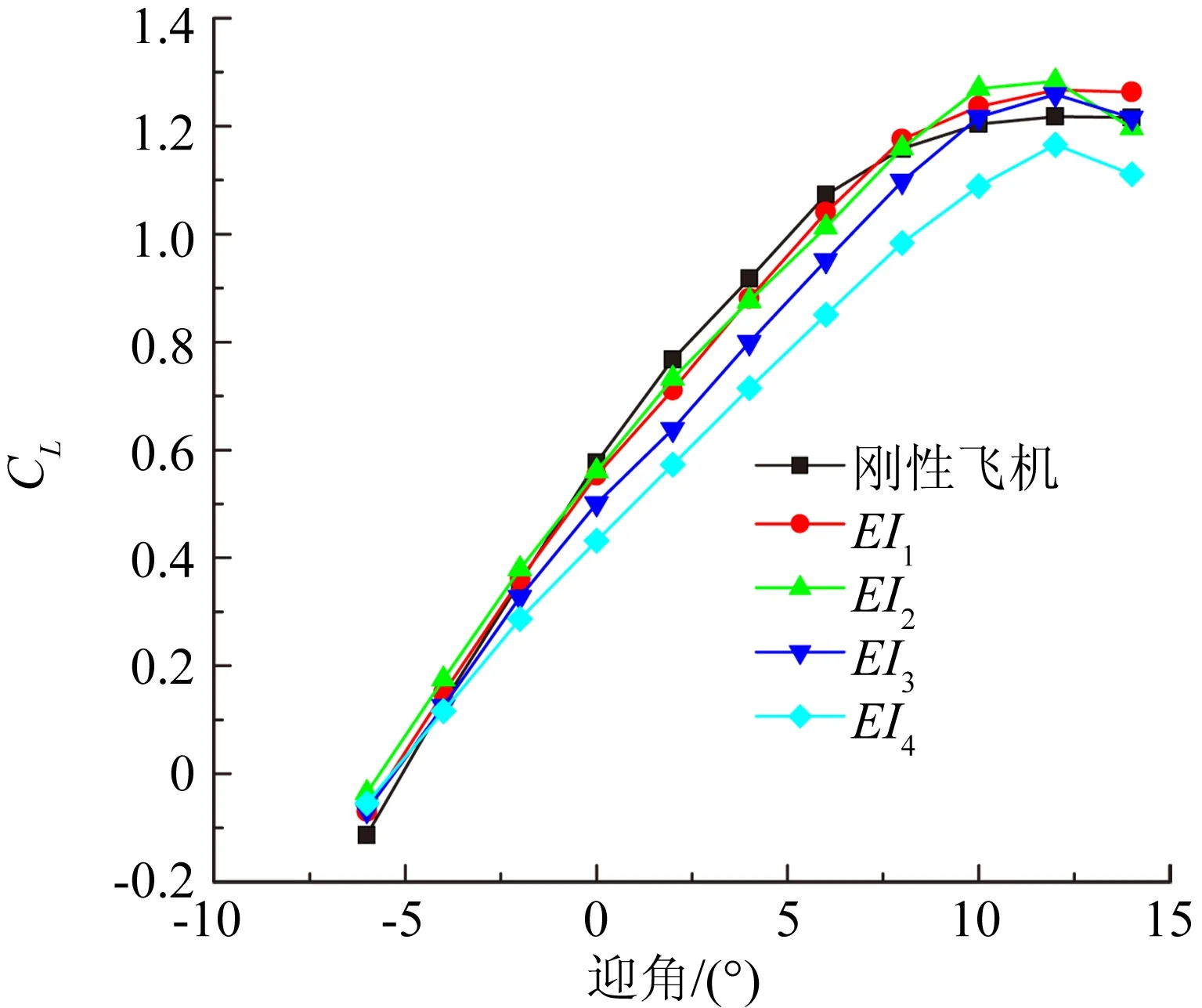
图30 升力曲线Fig.30 Lift curve
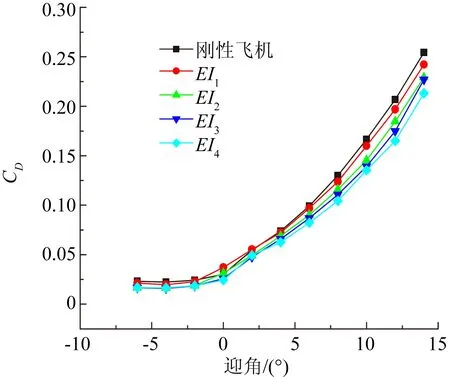
图31 阻力曲线Fig.31 Drag curve
由图30中的计算结果可以看出,当弯曲刚度较大时,静气动弹性效应对全机升力的影响较弱;随着弯曲刚度进一步降低,同样迎角下,升力系数减小得越来越显著。主要是因为随弯曲刚度的降低,扭转刚度并不改变,由弯曲变形引起的气动载荷的改变进而对扭转变形造成的影响较弱。另外弯曲刚度较弱时,升力线斜率降低得非常明显,在这类飞机的总体气动设计时需要注意。
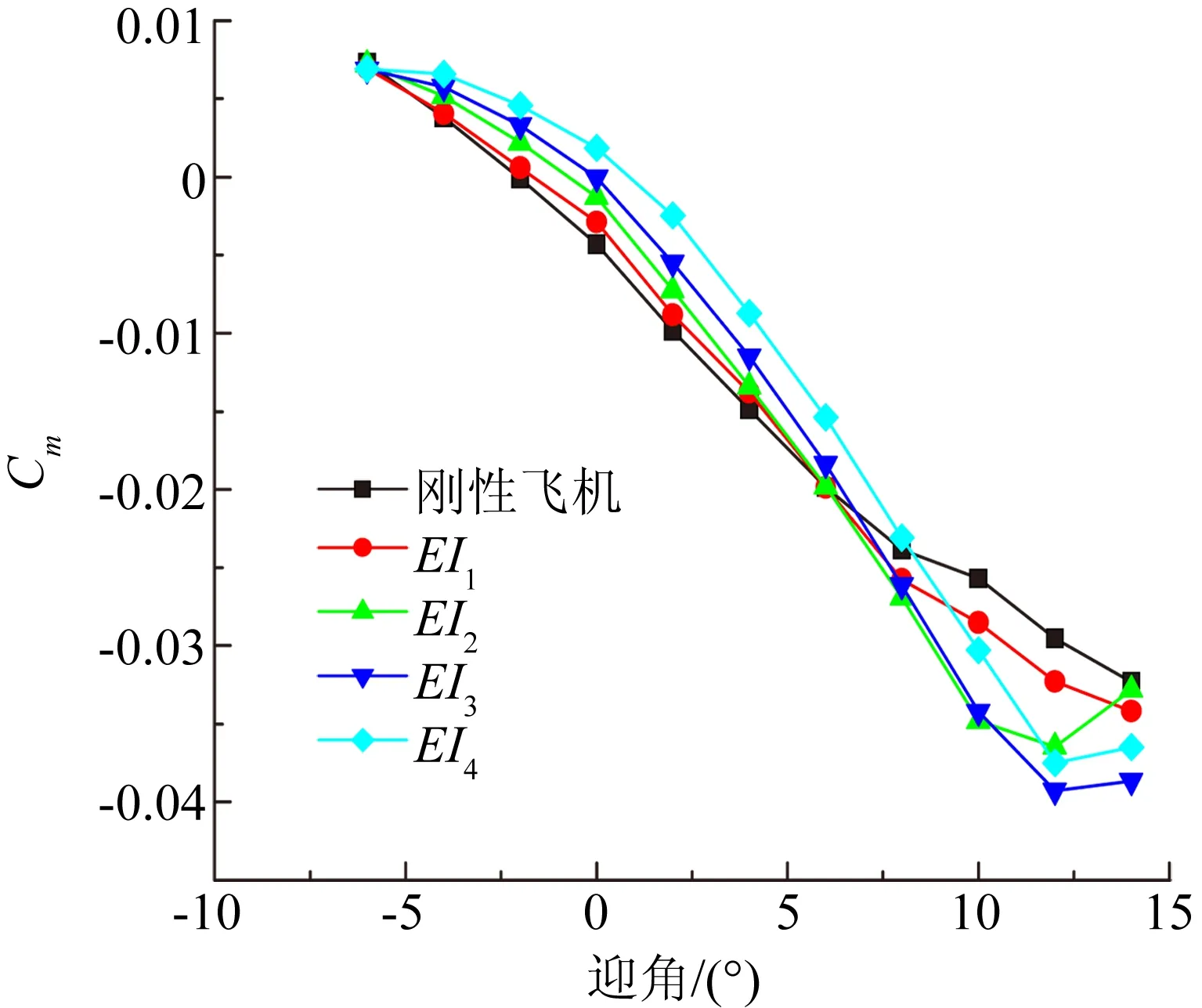
图32 俯仰力矩曲线Fig.32 Pitching moment curve
由图31中阻力系数曲线的变化趋势可以看出,随着弯曲刚度的减弱,在小迎角范围内弹性变形对全机阻力的影响非常小;当迎角大于4°时,弹性变形的增加进一步降低了阻力系数,减小的原因可以归因于升力的降低减小了一定的诱导阻力。
由图32中力矩系数曲线,可以看出在迎角小于4°的线性区域内,相同迎角下,弯曲刚度越小,俯仰力矩系数越大,并且俯仰力矩斜率的绝对值随变形的增加而增加。主要原因可以归结为以下两点:1) 随着变形的增加,外侧机翼靠近前缘区域内的压力差降低得非常显著,而变形对靠近后缘区域内的压力差的影响较弱,引起了剖面压力中心及全机气动载荷分布的改变,最终导致全机焦点后移。2) 与机翼上反角为0°时,迎角的增加不会改变局部机翼的纵向位置不同;弹性变形的增加相当于增加了机翼的上反角,由于空间旋转效应,随着迎角的增加,局部升力面将向后偏移,从而使气动焦点相对重心后移。
可见弹性变形显著地改变了该无人机的俯仰力矩特性,有利于提升这类飞机的纵向静稳定裕度,进而在全机气动特性上有利于改善无人机的静稳定性。
弯曲变形较大时,全机最大升阻比降低大约8%,主要是因为升力降低得比较明显,而弹性变形对阻力的影响相对较弱;这一特性将削弱无人机的巡航性能,在总体设计阶段中,预测这类无人机的航程参数时应考虑弹性变形对升阻性能的影响,否则可能会引起显著的误差。
在线性段对全机迎角-升力曲线和迎角-力矩曲线进行拟合,进而得到全机升力线斜率、俯仰力矩导数及纵向静稳定裕度如表2所示,CLα表示升力线斜率、Cmα表示俯仰力矩导数、-Cmα/CLα表示静稳定裕度。 由表2中的计算结果可以看出,随着弯曲刚度的降低和弯曲变形的增加,无人机的升力线斜率呈现出逐渐下降的趋势;当弯曲刚度降低到初始弯曲刚度的21%左右时(此时翼尖弯曲位移约为展长的20%),升力线斜率降低了18%左右;刚性以及几种弯曲刚度状态下无人机的俯仰力矩导数均小于0,说明无人机的纵向气动特性依然是静稳定的。另外,随着弯曲刚度的降低,无人机俯仰力矩导数的绝对值逐渐增加,说明弹性变形的增加改变了算例布局无人机的纵向静稳定性。随着弯曲变形的增加,纵向静稳定裕度由刚性飞机的3.276%提升到弹性飞机的4.66%(对应弯曲刚度EI4),增加了约42.3%,说明弹性变形对这类布局无人机纵向静稳定裕度的改变是非常显著的。由于这类布局无人机没有水平尾翼,纵向静稳定性一般配置较低,弹性变形对无人机纵向静稳定性的改变具有一定的潜在利用价值,在这类飞机总体设计阶段可以充分利用这一特点。
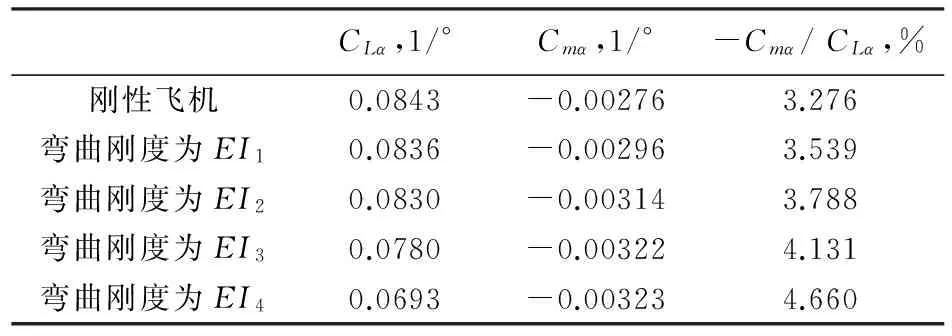
表2 无人机纵向气动静导数及稳定裕度Table 2 Static derivatives and stability margin of UAV
在气动载荷的作用下,大柔性太阳能无人机将产生较大的弯曲变形,相当于增加了无人机机翼的上反角,如弯曲刚度为EI4时,相当于机翼的上反角增加了约24°,显然该无人机的横航向力矩特性将显著地受到影响。无人机的滚转力矩系数用Cl表示,偏航力矩系数用Cn表示,变形后上述系数的发展趋势如图33和图34所示。
不同弹性变形状态下,无人机的滚转力矩导数和偏航力矩导数如表3所示,Clβ表示滚转力矩导数,Cnβ表示偏航力矩导数。
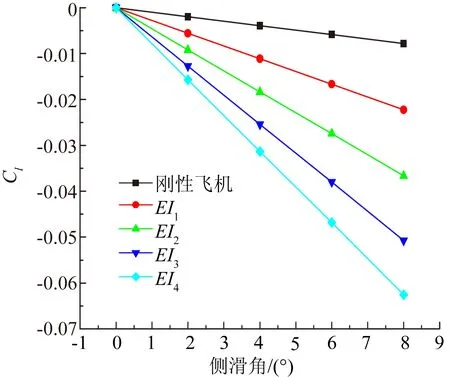
图33 滚转力矩系数曲线Fig.33 Rolling moment curve
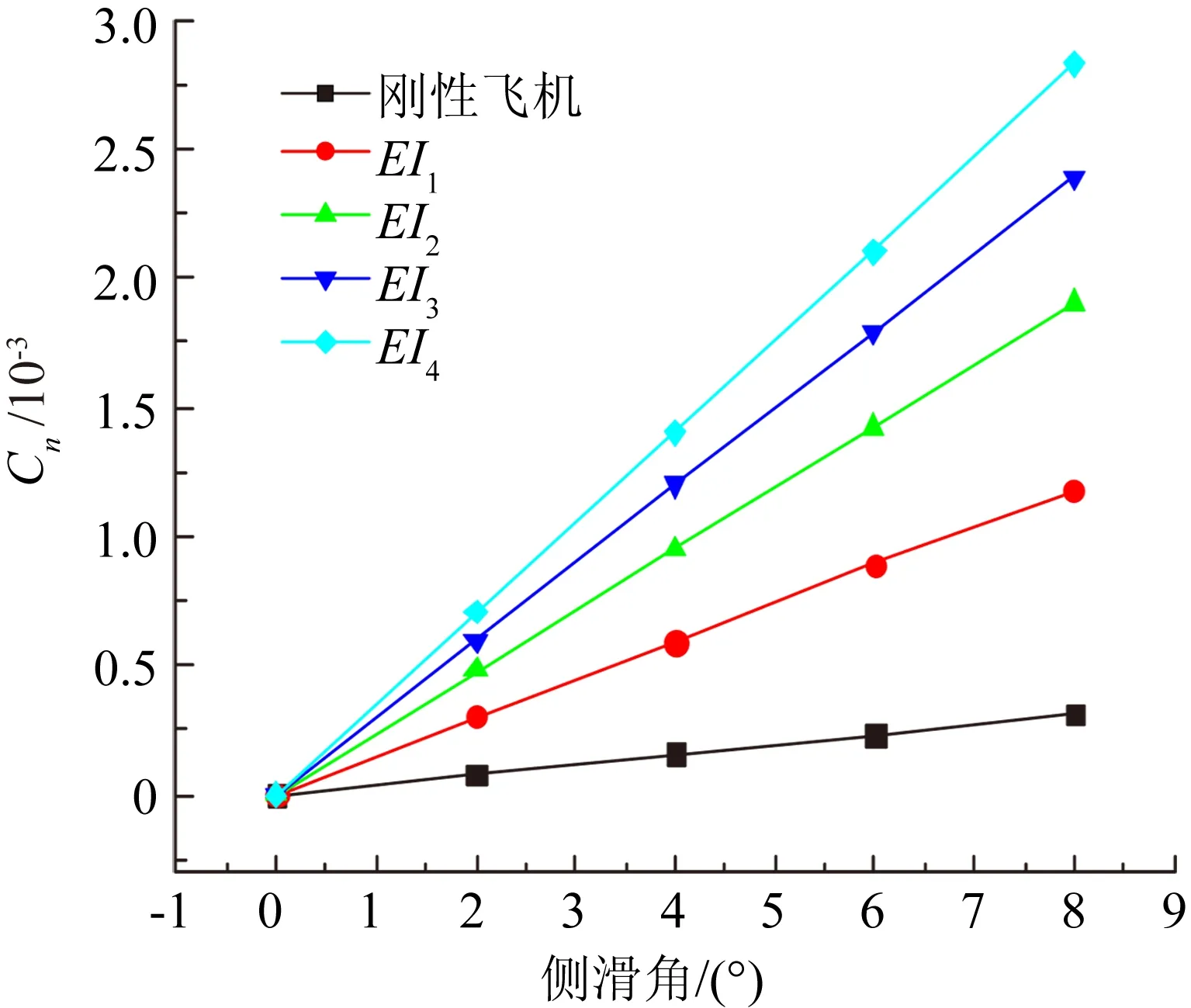
图34 偏航力矩系数曲线Fig.34 Yawing moment curve

Clβ,1/°Cnβ,1/°刚性飞机-0.000980.00004弯曲刚度为EI1-0.002780.00015弯曲刚度为EI2-0.004580.00024弯曲刚度为EI3-0.006340.00030弯曲刚度为EI4-0.007820.00035
随着弹性变形的增加,滚转力矩导数的绝对值与偏航力矩导数都呈现出单调增加的趋势;当弯曲刚度为EI4时,滚转力矩导数的绝对值为刚性飞机的7.98倍,偏航力矩导数为刚性飞机的8.75倍,弹性变形显著地改变了该无人机的横航向静稳定性。
大柔性太阳能无人机的静气动弹性效应,改变了无人机的横航向静稳定性;对于具有正常横航向静稳定性的飞机,当Cnβ/Clβ的绝对值过大时,飞机易产生螺旋不稳定;当Cnβ/Clβ的绝对值过小时,则飞机易产生荷兰滚或飘摆不定;而弹性变形对Cnβ及Clβ影响较为显著,在这类大柔性太阳能无人机的总体设计阶段中机翼上反角等参数的确定时,应着重考虑弹性变形对其气动特性及横航向静稳定性的影响。'
4 缩比自由飞验证技术在高空长航时太阳能无人机高效气动力设计中的应用
缩比自由飞验证技术的主要特点是缩比模型在天空中飞行进行试验,与风洞试验技术中模型被支架支撑而受约束不同,可以完全避免风洞洞壁和支杆的约束和干扰。缩比自由飞验证技术的主要特点有模型不受约束、试验高度范围大、试验马赫数范围宽、可以模拟不同大气状态、试验雷诺数高、综合模拟能力强、无飞行员安全问题等,使得模拟条件真实,贴近真实飞行,而且形象、直观,试验结果更可靠、有效[59-60]。
中航工业一飞院通过缩比验证机技术验证了多个刚度下的太阳能无人机气动特性,如图35所示。通过设计不同刚度的机翼进行试飞试验,还研究了多种静气弹效应下的全机气动特性、操稳特性等,探索了该布局的飞行边界,降低了研发技术风险,取得了较好的效果。

图35 中航工业一飞院的太阳能无人机缩比验证机Fig.35 Sub-scaled flight test model of solar powered UAV in AVIC the First Aircraft Institute
在开展缩比自由飞验证技术时需要满足的相似性准则有雷诺数、马赫数、当量角速度和斯德鲁哈尔数、弗劳德数、相对密度因子和相对惯性矩、气动弹性弯曲和扭转参数等[61-63]。一般情况下,缩比过程都是针对不可压或可压流试验条件下的自由飞试验。对于不可压流动,动态特性都使用弗劳德数相似需求缩比得到的速度;对于可压缩流动,压缩性影响都通过满足马赫数相似的要求来确定。
5 结束语
高空长航时太阳能无人机一般采取“单设计点”的设计思想,对设计雷诺数、结构变形等多种设计约束的预测精度提出了更高的要求。本文主要对高空长航时太阳能无人机的高效气动力设计挑战及缩比验证技术的应用开展了一定的研究,主要得到以下结论:
1) 高空长航时太阳能无人机的飞行雷诺数较低,设计雷诺数的略微变化将显著地影响全机的巡航性能等,需要在该类飞机的总体气动设计中引起设计者的特别注意。
2) 为了尽可能地减轻结构重量,高空长航时太阳能无人机的机翼结构设计一般采用柔性机翼设计思想,允许较大的弹性变形,将显著地改变机翼的气动载荷分布及全机的横航向静稳定性。对具有正常横航向稳定性的飞机,当Cnβ/Clβ过大时,飞机易产生螺旋不稳定;当Cnβ/Clβ过小时,则飞机易产生荷兰滚或飘摆不定,而弹性变形对该类飞机横航向静稳定性的影响比较明显,在其总体气动设计时,应考虑几何大变形对气动特性及横航向稳定性的影响。
3) 缩比自由飞验证技术在高空长航时太阳能无人机的总体气动设计中可以较好地反应低雷诺数、弹性变形等对全机气动特性的影响,又可以较好地避免技术风险、降低研发成本,在该类飞机的高效气动力设计中具有较好的应用前景,值得进一步推广。
[1]Cestino E. Design of very long-endurance solar powered UAV[D].[PhD Thesis]. Politecnico di Torino: Department of Aerospace Engineering , 2006.
[2]Gao Guanglin, Li Zhanke, Song Bifeng. Key technologies of solar powered unmanned air vehicle[J]. Flight Dynamics, 2010, 28(1): 1-4. (in Chinese)高广林, 李占科, 宋笔锋. 太阳能无人机关键技术分析[J]. 飞行力学, 2010, 28(1): 1-4.
[3]Haws T D, Bowman W J. Thermal analysis of the pathfinder aircraft. AIAA-99-0735[R]. Reston: AIAA, 1999.
[4]Deng Haiqiang, Yu Xiongqing. Solar aircraft: status and directions[J]. Aeronautical Science and Technology, 2006(1): 28-30. (in Chinese)邓海强, 余雄庆. 太阳能飞机的现状和发展趋势[J]. 航空科学技术, 2006(1): 28-30.
[5]Youngblood J W. Design of long endurance unmanned airplanes incorporating solar and fuel cells propulsion. AIAA-84-1430[R]. Reston: AIAA, 1984.
[6]Bailey M D, Bower M V. High altitude solar powered platform[R]. Hanover (Maryland, United States): NASA Center for Aerospace Information, 1992.
[7]Wang Yanguang, Li Jianquan, Li Yong, et al. Characteristics and application prospects of near space flying vehicles[J]. Spacecraft Engineering, 2007, 16(1): 50-57. (in Chinese)王彦广, 李健全, 李勇, 等. 近空间飞行器的特点及其应用前景[J]. 航天器工程, 2007, 16(1): 50-57.
[8]Romeo G, Frulla G, Cestino E, et al. HELIPLAT: design, aerodynamic, structuralanalysis of long-endurance solar-powered stratospheric platform[J]. Aircraft, 2004, 41(6): 1505-1520.
[9]Chang Min, Zhou Zhou, Zheng Zhicheng. Flight principles of solar-powered airplane and sensitivity analysis of its conceptual parameters[J]. Journal of Northwestern Polytechnical University, 2010, 8(5): 792-796. (in Chinese)昌敏, 周洲, 郑志成. 太阳能飞机原理及总体参数敏度分析[J]. 西北工业大学学报, 2010, 28(5): 792-796.
[10]Ma Dongli, Bao Wenzhuo, Qiao Yuhang. Study of flight path for solar-powered aircraft based on gravity energy reservation[J]. Acta Aeronautical et Astronauticasinica, 2014, 35(2): 408-416. (in Chinese)马东立, 包文卓, 乔宇航. 基于重力储能的太阳能飞机飞行轨迹研究[J]. 航空学报, 2014, 35(2): 408-416.
[11]Chang Min, Zhou Zhou, Li Yingying. An effective theoretical analysis of persistent flight altitude of solar-powered airplanes[J]. Journal of Northwestern Polytechnical University, 2012, 30(4): 541-546. (in Chinese)昌敏, 周洲, 李盈盈. 基于能量平衡的太阳能飞机可持续高度分析[J]. 西北工业大学学报, 2012, 30(4): 541-546.
[12]Wu Anmin. Solar-powered aircraft design and TRANSYS procedure simulation[D].[Master’s Thesis]. Xi’an: Northwestern PolytechnicalUniversity, 2003. 吴安民. 太阳能飞机设计计算与TRANSYS程序模拟[D].[硕士学位论文]. 西安: 西北工业大学, 2003.
[13]Deng Haiqiang. A study on integrated aerodynamic/structural/propulsive design of solar powered aircraft[D]. [Master’s Thesis]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2006. (in Chinese)邓海强. 小型太阳能飞机气动/结构/推进一体化设计研究[D].[硕士学位论文]. 南京: 南京航空航天大学, 2006.
[14]Tegeder T. Development of an efficient solar powered unmanned aerial vehicle with an onboard solar tracker[D]. Brigham Young University, 2007.
[15]Flittie K, Curtin B. Pathfinder solar-powered aircraft flight performance. AIAA-98-4446[R]. Reston: AIAA, 1998.
[16]TeetsE H Jr. Donohue C J, Wright P T. Meteorological support of the Helios world record high altitude flight to 96863feet. NASA/TM-2002-210727[R]. Hanover (Maryland, United States): NASA Center for Aerospace Information, 2002.
[17]Garbe G, Montgomery E E. An overview of NASA’s solar sail propulsion project[C]//39thAIAA PAPER/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, July, 2003.
[18]Noll T E, Brown J M, Perez-Davis M E, et al. Investigation of the Helios prototype aircraft mishap[R]. Hanover (Maryland, United States): NASA Center for Aerospace Information, 2004.
[19]Miller G D. Solar powered aerial vehicle. United States Patent Application 20090026316[P]. 2009, 1, 29. http: //www. freepatentsonline. com/y2009/0026316. html/
[20]Noth A, Siegwart R, Engel W. Design of solar powered airplanes for continuous flight[D]. Switzerland: Ingénieuren Microtechnique Ecole Polytechnique Fédérale de Lausanne, 2008.
[21]Romeo G, Frulla G. HELIPLAT: Aerodynamic and structural analysis of HALE solar powered platform. AIAA 2002-3504[R]. Reston: AIAA, 2002.
[22]Romeo G, Frulla G, Cestino E. A high-altitude long-endurance solar-powered unmanned air vehicle for multi-payload and operations[J]. Aerospace Engineering, 2006, 221(part G): 199-216.
[23]Ross H. Fly around the world with a solar powered airplane. AIAA-2008-8954[R]. Reston: AIAA, 2008.
[24]Laurenzo R. Soaring on a solar impulse[J]. Aerospace America, 2009: 32-36.
[25]Smith A M O, Transition G N. Pressure gradient and stability theory. Rep. ES-26388[R]. Long Beach, California: Douglas Aircraft Company , 1956.
[26]Van Ingen J L. A suggested semi-empiricalmethod for the calculation of the boundary layertransition region. Rep. VTH-74[R]. The Netherlands, Delft: Univ. of Delft, Dept. Aerospace Engineering, 1956.
[27]Thorwald H. Parabolized stability equationsin special courseon progress in transition modeling[R]. AGARD Report793, 1994.
[28]Malik M R, Li F. Transition studies for swept wing flows using PSE. AIAA-93-0077[R]. Reston: AIAA, 1993.
[29] Liu Z, Zhao W, Xiong G, et al. Direct numerical simulationof flow transition in high-speed boundary layers Aroundairfoils. AIAA-97-0753[R]. Reston: AIAA, 1997.
[30]Fasel H F, Meitz H L, Bachman C R. DNS and LES for investigatingtransition and transition control. AIAA-97-1820[R]. Reston: AIAA, 1997.
[31]WANG Kelei. Design of low Reynolds number airfoil[D].[Master’s Thesis]. Xi’an: Northwestern Polytechnical University, 2014. (in Chinese)王科雷. 低雷诺数翼型设计研究[D].[硕士学位论文]. 西安: 西北工业大学, 2014.
[32]Somers D M, Maughmer M D. Theoretical aerodynamicanalyses of six airfoils for useon small wind turbines[R]. NREL/SR-500-33295, 2003.
[33]Drela M. XFOIL: An analysis and design system for low Reynolds number airfoils. In: Mueller T J. Low Reynolds Number Aerodynamics[M]. Lecture Notes in Engineering, Springer, Berlin, Heidelberg, 1989, 54: 1-12.
[34]Zhang Qiang, Yang Yong. Numerical analysis of low-Reynolds -number flow over airfoil[J]. Acta Aerodynamica Sinica, 2006, 24(4): 482-486. (in Chinese)张强, 杨永. 绕翼型低雷诺数流动的数值分析研究[J]. 空气动力学学报, 2006, 24(4): 482-486.
[35]Bai Peng, Cui Erjie, Zhou Weijiang, et al. Numerical simulation of laminar separation bubble over 2D airfoil at low Reynolds number[J]. Acta Aerodynamica Sinica, 2006, 24(4): 416-424. (in Chinese)白鹏, 崔尔杰, 周伟江, 等. 翼型低雷诺数层流分离泡数值研究[J]. 空气动力学学报, 2006, 24(4): 416-424.
[36]Guan Jian, Guo Zheng. Numerical simulation of low-reynolds-number flows over the E387 airfoil[J]. Science Technologu and Engineering, 2013, 13(24): 7275-7281. (in Chinese)关键, 郭正. 绕翼型低雷诺数流动的数值仿真[J]. 科学技术与工程, 2013, 13(24): 7275-7281.
[37]Karasu I, Genç MS, Açikel HH. Numerical study on low Reynolds number flows over an aerofoil[J]. J. Appl. Mech. Eng., 2013, 2(5): 1000131.
[38]ChengTingting, Zhan Zhengke, QuKe. Prediction of transition and optimal roughness height based on transition model[J]. Aeronautical computing technique, 2012, 42(5): 75-79. (in Chinese)成婷婷, 张正科, 屈科. 用转捩模型预测转捩及确定最佳粗糙带高度[J]. 航空计算技术, 2012, 42(5): 75-79.
[39]Sahin M, Hall J, Mohseni K. Direct numerical simulation of separatedlow-Reynolds number flows aroundan Eppler 387 airfoil[R]. University of Colorado at Boulder, USA.
[40]Li Chuanzheng, Zhou Zhou. Study on application of transition model on Low-Reynolds Number airfoil[C]//The 5th UAV conference in china, 2014. (in Chinese)李传正, 周洲. 转捩模型在低雷诺数翼型绕流中的应用研究[C]//第五届中国无人机大会, 2014.
[41]Li Chuanzheng. Study on Low-Reynolds Number aerodynamics numerical simulation of solar powered UAV[D].[Master’s thesis]. Xi’an: Northwestern PolytechnicalUniversity, 2014. (in Chinese)李传正. 太阳能飞行器低雷诺数气动数值模拟方法研究[D].[硕士学位论文]. 西安: 西北工业大学, 2014.
[42]Zhou Zhou, Wang Zhengping, Zhu Xiaoping. A πtypical full wing solar powered UAV. ZL201310354084.4[P]. 2013. 周洲, 王正平, 祝小平等. 一种π型全翼式太阳能无人机. 中国, ZL201310354084.4[P]. 2013.
[43]Gan Wenbiao, Zhou Zhou, Xu Xiaoping. Aerodynamic numerical simulation of bionic full-wing typical solar powered unmanned aerial vehicle[J]. Acta Aeronautical et Astronautica Sinica, 2015, 36(10): 3284-3294. (in Chinese)甘文彪, 周洲, 许晓平. 仿生全翼式太阳能无人机启动数值模拟[J]. 航空学报, 2015, 36(10): 3284-3294.
[44]Wang Wei, Zhou Zhou, Zhu Xiaoping, et al. Static aeroelastic characteristics analysis of a very flexible solar powered UAV with geometrical nonlinear effect considered[J]. Journal of Northwestern Polytechnicle University, 2014, 32(4): 499-504. (in Chinese)王伟, 周洲, 祝小平, 等. 考虑几何非线性效应的大柔性太阳能无人机静气动弹性分析[J]. 西北工业大学学报, 2014, 32(4): 499-504.
[45]Wang Wei, Zhou Zhou, Zhu Xiaoping. Solar array mounting effects on flutter characteristics of solar powered UAV[J]. Advanced Materials Research, 2014, (940): 410-414. Wang Wei, Zhou Zhou, Zhu Xiaoping, et al. Exploring aeroelstic stability of very flexible solar powered UAV with geometrically large deformation[J]. Journal of Northwestern Polytechnical University, 2014, 32(4): 499-504. (in Chinese)王伟, 周洲, 祝小平, 等. 几何大变形太阳能无人机非线性气动弹性稳定性研究[J]. 西北工业大学学报, 2015, 33(1): 1-8.
[46]Wang Wei, Zhou Zhou, Zhu Xiaoping, et al. A CR theory-based approach for solving nonlinear aeroelasticityof very flexible wing[J]. Journal of Vibration and Shock, 2014, 32(4): 499-504. (in Chinese)王伟, 周洲, 祝小平, 等. 一种基于CR理论的大柔性机翼非线性气动弹性求解方法[J]. 振动与冲击, 2015, 34(19): 62-70.
[47]Wang Wei, Zhou Zhou, Zhu Xiaoping, et al. CR approach of nonlinear trim and flight load analysis of very flexible solar powered UAV[J]. Journal of Northwestern Polytechnical University, 2015, 33(4): 566-572. (in Chinese)王伟, 周洲, 祝小平, 等. 基于CR理论的大柔性太阳能无人机非线性配平及飞行载荷分析[J]. 西北工业大学学报, 2015, 33(4): 566-572.
[48]Wang Wei, Zhu Xiaoping, Zhou Zhou, et al. A method for nonlinear aeroelasticity trim and stability analysis of very flexible aircraft based on co-rotational theory[J]. Journal of Fluids and Structures, 2016, 62: 209-229. Lyu Hexiang, Zhu Jufen, Ma Liying. Geometrically nonlinearity analysis of large rotation beams[J]. Compute Structural Mechanical and Application, 1995, 12(4): 485-490. (in Chinese)吕和祥, 朱菊芬, 马莉颖. 大转动梁的几何非线性分析讨论[J]. 计算结构力学及应用, 1995, 12(4): 485-490.
[49]Cai Songpo, Shen Pusheng. CR approach for finite element analysis of 2-D beams with large rotation[J]. Engineering Mechanics, 2006, 23(supplement 1): 69-72. (in Chinese)蔡松柏, 沈蒲生. 大转动平面梁有限元分析的共旋转坐标法[J]. 工程力学, 2006, 23(增刊1): 69-72.
[50]Wang Wei. Nonlinear aeroelasticity and flight dynamics analysis of very flexible solar powered UAV [D].[Phd. Thesis]. Xi’an: Northwestern Polytechnical University, 2015. (in Chinese)王伟. 太阳能无人机非线性气动弹性及飞行力学研究[D].[博士学位论文]. 西安: 西北工业大学, 2015.
[51]Palacios R, Cesnik C. Static nonlinear aeroelasticity of flexible wing in compressible flow. AIAA-2005-1945[R]. Reston: AIAA, 2005.
[52]Hepp J P III. Static aeroelastic analysis of the ARW-2 wing including correlation with experiment[D]. Department of Mechanical Engineering and Material Science Duke University, 2005.
[53]Ma Tielin, Ma Dongli, Zhang Hua. Aerodynamics analysis of very flexible high aspect ratio wing[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(7): 781-784. (in Chinese)马铁林, 马东立, 张华. 大展弦比柔性机翼的气动特性分析[J]. 北京航空航天大学学报, 2007, 33(7): 781-784.
[54]Fan Ruijun, Feng Zhaohui, Zhou Zhou. Static aeroelastic investigation of large aspect ratio UAV[J]. Chinese Quarterly of Mechanics, 2009, 30(4): 548-554. (in Chinese)范锐军, 冯朝辉, 周洲. 大展弦比无人机的静气弹问题计算及分析[J]. 力学季刊, 2009, 30(4): 548-554.
[55]Shi Aiming, Yang Yongnian, Wang Gang. Investigation of characteristics of static aeroelasticity for large elastic wing in transonic flow[J]. Engineering Mechanics, 2006, 23(5): 173-176. (in Chinese)史爱明, 样永年, 王刚. 弹性机翼跨音速静气动弹性问题研究[J]. 工程力学, 2006, 23(5): 173-176.
[56]Cheng Wanju. Numerical studies of aircraft static aeroelasticity based on N-S equations[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2008. (in Chinese)成婉菊. 基于N-S方程的飞机静气动弹性计算方法研究[D]. 南京: 南京航空航天大学, 2008.
[57]Zhang Shouxin. Model free-flight test[M]. Beijing: NationDefence Industry Press, 2002. (in Chinese)张守信. 模型自由飞试验[M]. 北京: 2002.
[58]Chester H W, James S B, Bowman J R, et al. Similitude requirements and scaling relationships as applied to model testing[R]. NASA Technical Paper 1435.
[59]Von Doenhoff A E. Principles of model testing. High speed aerodynamics and jet propulsion. In: Donovan A F, Lawrence H R , Goddard F E, et al. High speed problems of aircraft and experimental method[M]. Princeton Univ. press, 1961.
[60]Holleman E C. Compiler: Initial results from flight testing a large, remotely piloted airplane model. NASA TM X-56024[R]. Hanover (Maryland, United States): NASA Center for Aerospace Information, 1974.
[61]Layton G P. NASA flight research center scale F-15 remotely piloted research vehicle program[C]//Advancements in flight test engineering proceedings of the fifth annual symposium, Soc. of flight test ENG., 1974: 1-63 to 1-76.
Challenges of high efficiency aerodynamics design for HALE solar powered UAV
Duan Zhuoyi, Wang Wei*, Geng Jianzhong, Zhang Jian, Li Junfu
(TheFirstAircraftInstituteofAVIC,Xi’an710089,China)
High Altitude Long Endurance (HALE) solar powered Unmanned Aerial Vehicle(UAV) has the design characteristics of low flying Reynolds number and very flexible wing. The single point design concept is usually introduced to the aerodynamics design of such aircraft. By this design concept, a relatively excellent aerodynamic characteristics can be obtained at the preconcert design state. However, these characteristics are usually weakened significantly if the design point has a slightly departure. First, the developed history and the design characteristics of solar powered UAV are reviewed. Second, we introduce the design challenges of high efficiency low Reynolds Number aerodynamics and the effect of static aeroelastics. Finally, the scaled free flying validation technique is prospected in the application of high efficiency aerodynamics design of HALE solar powered UAV.
solar powered UAV; low Reynolds number; aerodynamics design; aeroelastics; scaled free flying; single design point
0258-1825(2017)02-0156-16
2017-01-05;
2017-02-06
段卓毅(1966-),男,博士, 博导,研究员,研究方向:飞行器总体气动设计等. E-mail: lcrong2015@163.com
王伟*, E-mail: weiwang1461@126.com
段卓毅, 王伟, 耿建中. 高空长航时太阳能无人机高效气动力设计新挑战[J]. 空气动力学学报, 2017, 35(2): 156-171.
10.7638/kqdlxxb-2017.0012 Duan Z Y, Wang W, Geng J Z. Challenges of high efficiency aerodynamics design for HALE solar powered UAV[J]. Acta Aerodynamica Sinica, 2017, 35(2): 156-171.
V217+.4;V216.7
A doi: 10.7638/kqdlxxb-2017.0012
猜你喜欢
科技视界(2021年7期)2021-04-13
北京航空航天大学学报(2020年3期)2021-01-14
航空学报(2020年9期)2020-12-01
北京航空航天大学学报(2020年10期)2020-11-14
润滑与密封(2019年7期)2019-08-02
振动工程学报(2019年2期)2019-05-13
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
北京航空航天大学学报(2017年2期)2017-11-24
北京航空航天大学学报(2017年6期)2017-11-23
