
基于时延Petri网的故障报警信息纠错处理方法
2017-05-16 22:46张瀛张旗
中国科技纵横 2017年4期
关键词:故障诊断
张瀛+张旗
摘 要:本文针对电力系统故障诊断问题的特点,基于时延Petri网的电力系统故障诊断模型,提出了电力系统故障报警信息的时序一致性识别算法和不完备信息状态估计推理方法,并选取典型算例进行了验证。结果表明,本文所提出的报警信息纠错处理方法,能够有效的剔除报警信息中的错误信息并补全丢失的信息,提高故障诊断的可靠性。
关键词:故障诊断;Petri网技术;故障报警;信息纠错
中图分类号:TP18 文献标识码:A 文章编号:1671-2064(2017)04-0122-03
现有的故障诊断系统普遍具有信息不确定性,主要表现在:SCADA/EMS采集的各站(厂)的实时数据规模也越来越大,造成不确定信息产生的可能性越大;当电力系统发生故障时,保护或开关会出现误动、拒动以及信息传输中数据的丢失等错误,这些因素会导致信息的不确定性。
针对以上情况,本文应用元件保护配置时延Petri网,对报警信息进行时序一致性识别、和不完备信息状态估计,滤除错误信息,补全丢失的信息,提高故障诊断系统的容错能力[1]。
1 时间/时延Petri网
1.1 基本 Petri 网的定义
Petri网是用来表征系统状态以及状态间转移关系的一种网图。一个基本Petri网的结构PNS是一个四元组PNS=
1.2 时间/时延Petri网
以时间为主变量的Petri网模型目前主要有两种,一种模块要求每种变迁变化都有一个时间主变量,并要求变量具有延时特性,并要求每一个变迁主变量都存在延时特性,另外这种特性一旦触发能立即引起延时。另外一种模型对变迁变化的时间主变量限定一定时间范围,在时间范围内外,其模块可以连续运行[3]。
2 开关保护信息的纠错模型建立及推理
报警信息纠错处理过程分为以下几步:
第一,设计形成电力设备缓时Petri网模型;
第二,对出现问题的元件具有一定判别特性;
第三,对发现的预警数据进行模拟计算,自动填补缺失数据。
2.1 继电保护原理介绍
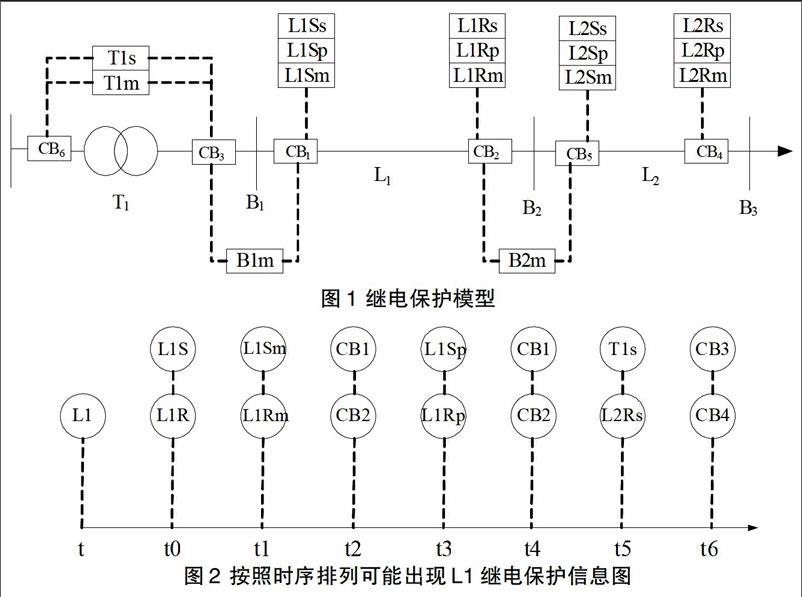
电力系统出现问题后主要需要解决的控制单元有电路网线、变压装置和主线;电力线路保护主要有电流保护、距离保护和光纤保护三种实现类型,以下分析仅从三段式来研究。图1中线路Ll和L2的继电保护具有3阶段模式保护,以L1左端保护L1Sm、L1Sp和L1Ss来分析,其中L1Sm是主保护;L1Sp是第一后备保护;L1Ss是第二后备保护。这种3阶段模式保护发生后都会激发CB1。主线保护主要有两种类型:这种保护主要起到保护主线,通过电流大小变化和电路比定义变化起到保护作用。
图1继电保护模型中B1m是主线保护,当电路出现问题,主线保护气会引发CB1和CB3断开,起到保护的作用。
变压器主要有3种类型:电流、电压及差动法。
如图1中继电保护模型为两种,其中一种覆盖范围为变压器,而另外一种模型的覆盖范围为变压器和变压器相连的电力元件。
2.2 电力保护Petri网模形成研究
为了简化研究模型,本文只考虑保护装置动作时间上的排序关系,不考虑时间间隔要求。具体内容为:
(1)定义时间延缓电力保护Petri网模的库所集和变迁集。在时间延缓电力保护Petri网模中,定义电力元件、保护系统和开关装置为库所集。0和1分别表示元件节点处于“正常”和“故障”状态。继电保护节点是由元件状态影响的保护组成,0和1分别表示继电保护节点处于“不动作”和“动作”状态。开关节点是继电保护控制的开关组成,0和1分别表示开关节点处于有“不动作”和“动作”状态。
(2)根据继电保护原理建立元件保护配置时延Petri网模型。以图1中元件L1为例,建立其继电保护信息图,如图2所示。
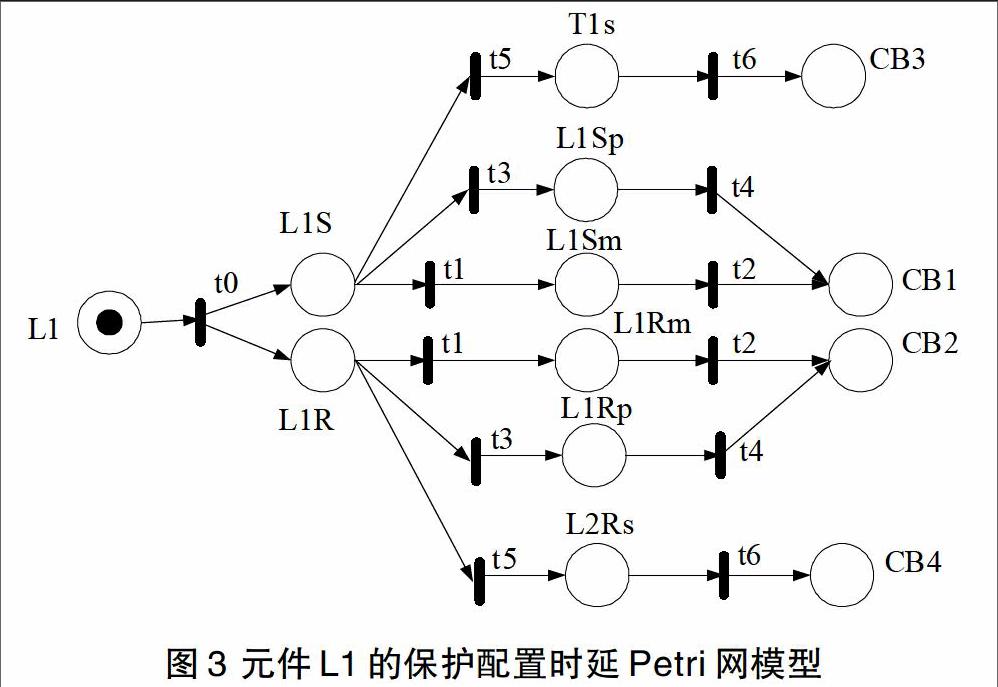
根据图2建立元件Ll的的保护配置时延Petri网模型,如图3所示。
2.3 故障信息的相同识别
信息的时序相同识别,就是在故障信息中筛选出符合某一元件故障触发动作时序保护机制的信息。
在电力系统正常运转过程中,如果继电系统没有发挥作用,这说明涉及的电力保护元件处于关闭;如果继电系统发挥作用,则会有一定的指示,并通过这样的指示确定问题故障信息的识别[4]。
在继电保护装置C,保护机制发生的定义为Rule(C),Rule(C)通过继电保护装置C中延缓时间Petri系统分析获得。当发现电力系统中继电保护装置C出现问题后定义为S=S(0)∪S(1),定义S(0)为继电保护装置C处于关状态,S(1)定义为继电保护装置C运行,继电保护装置C的问题出现相同识别为S(1)变量为保护机制发生Rule(C)的极大容量SRmax(1),即容量SRmax存在问题因素为最大,其运行为:
(l)以S(1)中每个元素Sj(1)为基时,以保护机制Ru1e (C)扫描识别其它元素,得到相同容量SRj(1)和不同时内容因素SRj(0)。
(2)上一步得到SRj(1),元素最大的即为SRmax(1)。
(3)修正时间不同内容,即Srest(1)=S(1)-SRmax(1),令Srest(0),則动作信息不是继电保护装置C启动的。
(4)获得继电保护装置C,形成判别目录SF,SF=S(0)∪Srest(0)∪SRmax(l)。
其中信息相同定义算法:
假设继电保护装置C的保护机制发生为Ru1e(C)=(a1,b2,c3,),下标1,2,3表示为保护机制a,b,c的变化量。实际问题内容为s={a(1)1,b(1)2,c(1)1,};其中1表示起作用,0代表没有工作。
由于继电保护(e0)没有动作,则有:S=S(0)∪S(1)={e(0)0}∪{a(1)1,b(1)2,c(1)1,}。
(1)先以S(1)中a(1)1为基时,按照保护机制Rule(C)获得的该元素定义时间相同内容集Sa(1)={a(1)};
(2)比较元素个数得到时序一致的极大值集SRmax(1)={a(1)1,b(1)2}。
(3)根据SRmax(1),评估C(1)1不是继电保护装置C触发的,改问关模式,得到Srest(0)={c(0)0}。
(4)最后得出用于继电保护装置C故障诊断的信息集为:SF=S(0)∪Srest(0)∪SRmax(1)={a(1)1,b(l)2,c(0)0}
2.4 基于时延Petri网的报警信息状态估计
经过上一节的处理,已筛选出符合嫌疑故障元件动作时序的报警信息,但这些信息可能不完备,本节目的为补全缺失的信息。
缺失信息节点状态可能与元件节点的状态相关,而元件节点的状态是未知的,此時需对元件节点的状态进行假设,再根据该假设和已有保护信息来判断缺失信息节点状态。开关库所,有动作信息的定义为“1”,无动作信息的定义为“0”。
3 算例
以图1线路L1故障为例,推理过程如下。
3.1 一致性识别
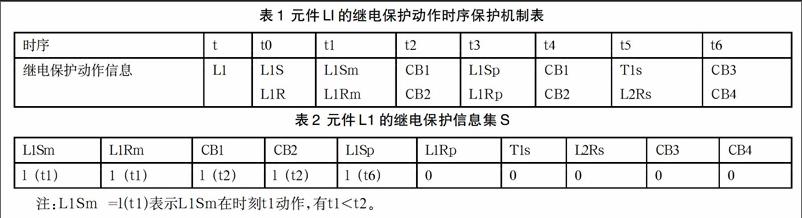
元件L1故障下继电保护动作的时序保护机制表Ruel(L1)可通过图2得到,如表1表2所示。
对于元件L1的继电保护信息集S,依据时序保护机制Ruel(L1),获得时序一致最大化信息集为:SRmax(1)=(L1Sm,L1Rm,CB1,CB2},修正L1Sp为闭合状态L1Sp=0,得到故障诊断信息集SF。
3.2 报警信息状态估计
假设在L1元件一致性识别后保护节点故障信息如表3所示。
将保护信息代入到元件L1的保护配置时延Petri网模型中,结果如图4所示。
然后对继电保护单元进行模拟,按照时序为L1Sm、L1Rm、L1Sp、 L1Rp、T1s、L2Rs。过程为:
(1)L1Sm的目标单位CB1定义为“0”,L1Sm的定义不变,为“0”。
(2)L1Rm的目标单位CB2定义为“1”,L1Rm的定义为“1”,其指令单位L1R通过L1Rm到达CB2,L1Rm的定义不变,为“1”。
(3)L1Sp的目标单位CB1定义为“0”,L1Sp的定义不变,为“0”。
(4)L1Rp的目标单位CB2定义为“1”,其指令单位L1R通过L1Rm到达CB2,L1Rp的定义不变,为“0”。
(5)T1s的目标单位CB3定义为“1”,T1s的定义为“0”,其指令单位L1R不能通过定义为“1”的节点到达CB3,因此将T1s的定义变为“1”。
(6)L2Rs的目标单位CB4定义为“0”,L2Rs的定义不变,为“0”。
最后统计出报警内容修正集{T1s},形成的预警信息集{L1Rm,CB2},供排除故障使用。
4 结语
本文针对电力系统故障诊断问题的特点,基于时延Petri网的电力系统故障诊断模型,提出了电力系统故障报警信息的时序一致性识别算法和不完备信息状态估计推理方法,并选取典型算例进行了验证。结果表明,本文所提出的报警信息纠错处理方法,能够有效的剔除报警信息中的错误信息并补全丢失的信息,提高故障诊断的可靠性。
参考文献
[1]吴欣.基于改进贝叶斯网络方法的电力系统故障诊断研究[D].浙江大学硕士论文,2005.
[2]蒋昌俊.Petri网的行为理论及其应用[M].北京:高等教育出版社,2003.
[3]袁崇义.Petri网原理与应用[M].北京:电子工业出版社,1998.
[4]王建元,纪延超.Petri网络在变压器故障诊断中的应用[J].电网技术,2002,26(8):21~24.
猜你喜欢
一重技术(2021年5期)2022-01-18
水泵技术(2021年3期)2021-08-14
装备制造技术(2020年3期)2020-12-25
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年10期)2017-11-28
北京航空航天大学学报(2016年6期)2016-11-16
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
振动工程学报(2014年2期)2014-03-01
振动、测试与诊断(2014年5期)2014-03-01
振动、测试与诊断(2014年4期)2014-03-01
