
一种水下高速运动目标的双阵纯方位TMA方法
2017-05-17 18:58吴旭
数字技术与应用 2017年3期
吴旭

摘要:水下高速运动目标运动分析有其特殊性,其一即为本舰不允许进行机动,故单阵纯方位目标运动分析不适于分析水下高速运动目标,本文基于双阵方位测量值分析其运动状态。纯方位目标运动分析是典型的非线性估计问题,文中利用扩展卡尔曼滤波算法进行双阵纯方位目标运动分析,从而解算出目标运动要素。文章通过数值仿真分析算法性能,验证了该方法的有效性。
关键词:目标运动分析;纯方位;扩展卡尔曼滤波
中图分类号:TN911 文献标识码:A 文章编号:1007-9416(2017)03-0234-01
TMA的基本问题即是利用带噪的阵元域数据估计出目标的运动要素[1]。在现代战争实际环境中,测得的目标特征数据通常极其有限,而目标的方位几乎成了唯一可靠的参数,因此BO-TMA具有十分重要的意义[2-4]。
水下运动目标的运动要素估计有其特殊性,其一是本舰不允许机动,其二是TMA算法的快速收敛性,因此单阵BO-TMA并不适用,文中采用双阵方位测量值进行TMA,基于扩展卡尔曼滤波算法(EKF)处理该非线性系统,通过计算机仿真分析了不同条件下算法性能,仿真结果表明:与单阵BO-TMA相比,该算法无需本舰机动即可实现对水下目标的运动分析。
1 双阵纯方位TMA原理
考慮如图1所示的基阵与目标间的几何关系,假定二维平面情形,两基阵均随本舰匀速直线运动,阵间距离D可预先测量并能实时修正,目标于平面内匀速直线运动。
表示目标的绝对运动状态(即相对坐标原点的运动状态,下同),其中分别为目标相对坐标原点的方向与方向的距离,分别为目标相对坐标原点的方向与方向的速度; 表示阵1的绝对运动状态,表示阵2的绝对运动状态。
表示目标相对于基阵1的运动状态,其中分别为目标相对基阵1的方向与方向的距离,分别为目标相对基阵1的方向与方向的速度,表示目标相对于基阵2的运动状态,其中分别为目标相对基阵2的方向与方向的距离,分别为目标相对基阵2的方向与方向的速度。、如上图所示,分别为基阵1、基阵2所测得的目标方位角。以基阵1为参考基阵,则有状态方程如下:
(1)
式中:为状态转移矩阵,为过程噪声,其自相关矩阵为Q,G为过程噪声转换矩阵。
简记为,测量方程如下:
(2)
其中:为量测噪声,其自相关矩阵为R,且有:
(3)
由式(3)可知,系统为非线性,经典的EKF算法非常适合处理此类问题[5]。对于非线性系统,EKF算法基于泰勒展开对其线性近似,然后利用卡尔曼滤波算法完成对目标状态的估计。
2 仿真计算
基于上述方法进行仿真计算。仿真条件:双阵间距D分别为600m和1200m;双阵方位测量误差均为正态随机变量,标准差分别为1.5°和0.5°,方位测量间隔T为1秒;本舰绝对航速6m/s,航向正东,基阵1的初始位置为(-D,0),目标初始位置为(-6000m,6000m),目标绝对航速20m/s,绝对航向120°。
图2给出了不同D情形下算法仿真结果。其中,方位测量误差标准差取0.5°。由图可知,D越大,收敛速度越快,估计性能愈好。
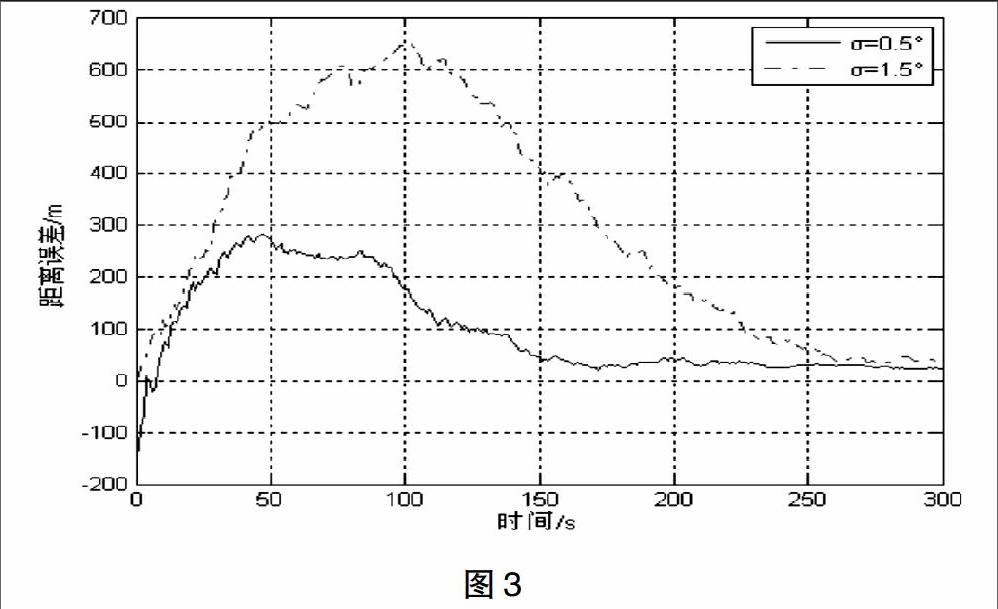
图3给出了不同方位测量误差下仿真结果。其中,D取600m;方位测量误差均值取0。由图可知,方位测量误差方差越小,收敛速度越快,估计性能越好。
仿真结果表明:基于EKF算法能实现双阵纯方位目标运动分析,且无需本舰执行机动。双阵间距、观测噪声影响算法性能,间距越大,噪声越小,算法性能越好。
3 结语
本文将EKF算法拓展到双阵TMA领域中,文章通过计算机仿真分析不同条件下算法性能,仿真结果表明算法的可行性,且双阵间距越大、观测噪声越小,算法性能越好。该算法是实时处理方法,不需存储大批量数据,非常适合工程实现。
参考文献
[1]O. Tremois, J. P. Le Cadre. Target Motion Analysis with multiple arrays: Performance Analysis[J].IEEE Transactions on Aerospace and Electronic Systems.1996, 32(3):1030-1046.
[2]Yun Jun Zhang, Guo Zhong Xu. Bearings-Only Target Motion Analysis via Instrumental Variable Estimation[J].IEEE Transactions On Signal Processing. 2010, 58(11):5523-5533.
[3]Claude Jauffret, Denis Pillon. Bearings-only maneuvering target motion analysis from a nonmaneuvering platform[J].IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(4):1934-1949.
[4]Laleh Badriasl,Kutluy l Dogancay. Three-dimensional Target Motion Analysis using azimuth/elevation angles[J].IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4):3178-3194.
[5]Bruce. P. Gibbs.Advanced Kalman filtering, least-squares and modeling: a practical handbook[M].New Jersey: John Wiley & Sons,2009.
