
基于光电位置传感的弹道偏航与姿态测量
2017-05-25 00:37侯望高陈遵田崔景霖
探测与控制学报 2017年2期
侯望高,陈遵田,崔景霖
(机电动态控制重点实验室,陕西 西安 710065)
基于光电位置传感的弹道偏航与姿态测量
侯望高,陈遵田,崔景霖
(机电动态控制重点实验室,陕西 西安 710065)
针对传统激光驾束制导弹道偏航和姿态测量需要高精度的惯性测量组件,存在系统复杂、体积大、成本高的问题,提出基于光电位置传感的弹道偏航与姿态角测量方法。该方法利用光电位置传感器PSD代替传统光电编码传感器完成弹道偏差测量,光电位置传感器还根据激光光斑在光电位置传感器上的位置代替传统惯性测量组件判断偏航角、俯仰角。同时实现弹丸弹道偏航与姿态角测量。测量精度评价分析表明,所提出的测量方法对弹丸偏航角和俯仰角测量精度可达到0.60°,能够满足小口径枪榴弹弹道修正的应用需求。
激光驾束制导;弹道修正;光电位置传感器;弹丸姿态测量
0 引言
激光驾束制导是通过地面激光照射器发射经过调制的激光束照射到要攻击的目标,同时发射激光驾束制导弹药。弹在飞行中通过安装在弹尾部的光信号接收器接收地面照射器发射的驾束光信号,依据驾束光场中调制信号的频率判断弹道的偏差量,结合弹上的惯性测量组件测量弹的姿态信息,为弹上制导组件的控制器提供修正所用的控制信息[1]。
由于激光驾束制导武器打击精度高,使用方便灵活,是目前精确打击武器发展的重点方向之一,并有向小口径弹药发展的趋势。
枪榴弹通常作为单兵使用的武器装备,作战使用灵活方便,在现代战争中仍有广泛的用途。传统的枪榴弹为无控弹药,作战时由于目标距离一般较远,在几百米以外,首发命中的概率低。为了提高枪榴弹的打击精度,在枪榴弹上采用激光驾束弹道修正技术,对枪榴弹丸弹道进行修正,实现枪榴弹有控化和精确打击,以提高枪榴弹的作战效能。
要实现小口径弹道的有控化和精确打击,首要的问题是解决弹上测量系统的小型化和低成本问题。机械和光纤惯性测量组件的体积大,无法在枪榴弹上使用。基于微机械的惯性测量组件精度低,价格高,难以满足枪榴弹的使用要求。针对现有的惯性测量组件无法在小口径弹上使用的问题,提出基于光电位置传感[2-5]的弹道偏航与姿态测量方法。
1 传统激光驾束制导的弹道测量和光电位置传感器
传统的激光驾束制导是由光电编码传感器和惯性测量组件两个装置分别实现弹道偏差测量和弹体姿态测量。
在弹道偏差测量时,由专门的地面激光器发射激光束照射目标,该光束为经调制盘调制和光学系统扩束的引导光束,引导光束在空间的位置不同,光信号的调制频率也不同,代表与中心位置的偏差量不同。导弹在引导激光光束中飞行,位于弹尾的光电编码传感器接收激光信号,依据接收到经调制的光信号频率计算出弹丸的弹道偏差量[1]。
在弹体姿态测量时,由弹上的惯性测量组件测量出弹体的俯仰和偏航角。滚转角的测量可通过惯性测量组件实现,也可由地磁传感器测量。弹道偏差量、俯仰和偏航角及滚转角在弹上计算机中进行综合判断,形成控制指令,控制导弹或炮弹向着目标飞行,直至命中目标。
激光驾束制导姿态测量原理框图如图1所示。

图1 激光驾束制导姿态测量原理框图Fig.1 Principle block diagram of laser beam riding guidance attitude measurement
光电位置传感器是一种对入射到光敏面上的光点位置敏感的光电传感器件,其输出信号与光点在光敏面上的位置有关。其特点是:1)它对光斑的形状无严格要求,即输出信号与光的聚焦无关,只与光的能量中心位置有关;2)光敏面上无须分割,消除了死区,可连续测量光斑位置,位置分辨率高;3)可同时检测位置和光强,PSD器件输出总光电流与入射光强有关,而各信号电极输出光电流之和等于总光电流[6]。
PSD的结构包含三层,上面为P层,下面为N层,中间为I层,它们全被制作在同一片硅片上。P层不仅作为光敏层,而且还是一个均匀地电阻层。当入射光照射到PSD的光敏层上时,在入射位置上就产生了与光能成比例的电荷,此电荷作为光电流通过电阻层(P层)由电极输出。由于P层的电阻是均匀的, 所以各电极的输出电流分别与光点到各电极的距离(电阻值)成反比[7-8]。
传统的激光驾束制导利用光电传感器测量弹道偏差信息,同时利用加速度计和陀螺仪测量弹丸相对于驾束激光的俯仰角和偏航角[9],这是利用两种组件实现两种功能造成系统复杂、体积大、成本高,难以在小口径枪榴弹上使用。另外微惯性测量组合虽然体积小,但存在零漂问题,测量精度低。惯性测量成为制约弹道修正小型化、低成本的瓶颈。
2 基于光电位置传感器的弹道修正姿态测量方法
针对传统激光驾束制导弹道测量存在的问题,提出基于光电位置传感器PSD的弹道偏航与姿态测量方法。保持现有地面激光照射器设计参数不变,采用PSD一种组件同时实现测量弹道偏差信息和弹丸相对于驾束激光的俯仰角和偏航角,在驾束激光坐标系中计算出弹丸偏航和俯仰姿态信息,结合磁传感器的滚转角信息,形成基于驾束光坐标系的控制指令,控制执行机构对弹丸弹道进行修正。基于光电位置传感器的弹道偏差与姿态测量原理框图如图2所示。
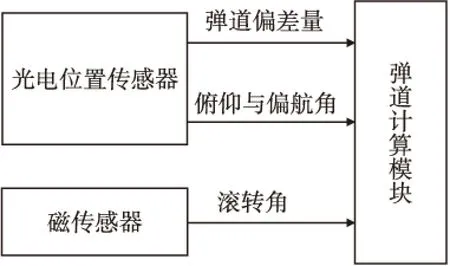
图2 光电位置传感器弹道偏差与姿态测量原理框图Fig.2 Principle block diagram of trajectory deviation and attitude measurement of photoelectric position sensor
光电位置传感器PSD测量弹道偏差与传统方法相同。而光电位置传感器PSD测量弹体姿态是利用PSD测量当前驾束激光经光学系统汇聚在光电位置传感器上的光斑落点位置,从而确定当前弹体的俯仰和偏航角。激光光斑在PSD上的落点不同则对应着不同的弹体姿态。这就实现了光电位置传感器PSD一种装置实现弹道偏差和弹体姿态两种信息测量。
枪榴弹在激光束中不同的飞行姿态对应着激光光斑落在光电位置传感器PSD上不同位置。当枪榴弹在驾束激光坐标系中沿激光光束方向飞行,并与激光光束夹角为零,此时弹体姿态处于无偏状态,激光汇聚光斑正好落在个光电位置传感器PSD的中间位置,如图3所示。

图3 弹体无偏PSD示意图Fig.3 Schematic diagram of trajectory unbiased PSD
当枪榴弹在驾束激光坐标系中不沿激光光束方向飞行,并与激光光束方向存在一定的夹角,此时弹体处于偏离状态,激光汇聚光斑落在光电位置传感器某一位置上,如图4、图5位置传感器的输出可以反映俯仰角度。同理,位置传感器也可以同时反映偏航角度。

图4 弹体上偏PSD示意图Fig.4 Schematic diagram of trajectory upward shif PSD

图5 弹体下偏PSD示意图Fig.5 Schematic diagram of trajectory downward migration PSD
与传统采用惯性测量组件测量弹的姿态不同的是,传统惯性测量组件所测量的是弹丸在大地坐标系中的俯仰和偏航角度,而光电位置传感器测量出的弹俯仰和偏航角是相对于驾束激光坐标系的姿态信息。位置传感器的输出与姿态信息的关系如下分析可得。
若以PSD 的中心点位置作为原点, 设电极1和电极2的距离为2L,电极1和电极2输出的光电流分别为I1和I2,则电极3上的电流为总电流I0,并且,I0=I1+I2,图6是PSD的断层结构示意图。

图6 PSD的断层结构示意图Fig.6 Schematic diagram of fault structure of PSD
光点离中心点的距离为xA,于是有:
(1)
利用式(1),即可确定光斑能量中心相对于器件中心的位置xA,它只与光电流I1,I2的和、差及比值有关,而与总电流无关(即与入射光功率的大小无关)。
对于二维PSD有四个电流输出端,分别为I1,I2,I3,I4,二维PSD 的中心点位置作为原点,光点坐标为(x,y)。式中I1,I2,I3,I4是PSD的四个电极的光电流输出,L对于具体的PSD器件实际长度是一个常量。可得光点位置坐标为:
3 基于PSD的弹体姿态测量精度分析
在几何光学中有任意入射角α的平行光束透过凸透镜后会在焦平面上汇聚为一点,如图7所示。

图7 PSD测量原理图Fig.7 PSD measurement principle diagram

β=arctan(x/f)
(2)
γ=arctan(y/f)
(3)
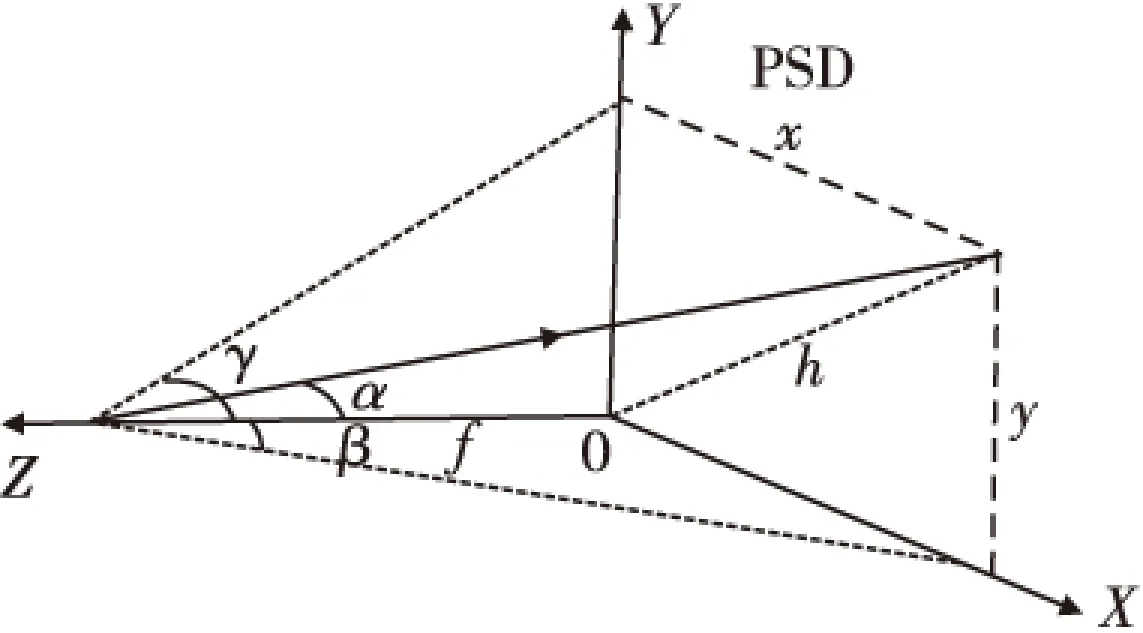
图8 角度分解Fig.8 Angle decomposition
对于二维PSD输出的电流信号经过信号处理可得出两路电压表示光点在PSD面上的二维坐标,焦距f为常数,因此,通过式(2)和式(3)可得出平行光束与PSD轴线水平和垂直方向夹角。
影响PSD测量弹体姿态(俯仰、偏航)角度精度的因素:
1)由式(2)、式(3)可知,测角范围与PSD接收范围成正比,与凸透镜的焦距成反比。条件形同情况下,PSD精度越高,测角精度越高。
针对枪榴弹小型化、低成本的要求,光学系统焦距f取10 mm,PSD选择光敏面积为10 mm×10 mm,精度为0.05 mm的器件,按照上述参数,偏航和俯仰角度测量范围为-26.6o~+26.6o,根据式(2)和式(3)可得出测角精度为0.29°;
2)光学系统与PSD装配误差所引起的测角系统误差。装配精度越高,误差越小。误差来源有光学镜片与PSD的平行度、同轴度以及光学镜片与PSD的前后位置精度。

图9 装配引起的偏差Fig.9 Deviation caused by assembly
如图9所示,若入射角为β,焦距误差为Δf,透镜与PSD之间平行度误差Δγ,则PSD位置测量误差Δa为
Δa=AB-A′B′=ftanβ-(f+Δf)sinβ/cos(β-Δγ)
(4)
按照一般的装配工艺和精度,平行度误差一般为0.01 rad,焦距误差为0.01 mm,在测量范围为-26.6o~+26.6o,焦距f=10 mm时,根据式(4),算出误差Δa为0.09 mm,根据式(2)换算成角度为0.52o。
3))放大电路噪声是产生信号处理电路的主要误差来源,主要是光电探测器PSD内噪声及运算放大器带来的噪声,图10是PSD等效噪声模型[7]。

图10 PSD等效噪声模型Fig.10 PSD equivalent noise model
图中,I0为总光电流,ID为PSD内暗电流,Cj为结电容,Rf为反馈电阻,B为电路带宽。选取低成本的PSD器件的相关参数:总光电流I0为10μA,PSD内暗电流ID为0.1 μA,PSD等效电阻ri为1.2 kΩ。电路带宽为10 kHz, 反馈电阻10 Ω。根据参考文献[7]提供的公式可以算出:
散粒噪声:
PSD电阻热噪声:
运算放大器输入等效电压噪声在输出端值:
其中,en为运放等效输入电压噪声。
反馈电阻的热噪声:
则总输出端噪声电压为:
前置电路为整个放大电路的主要噪声来源,若噪声经放大电路全部放大,则为1.2mV。实际,噪声经滤波处理,不可能完全被放大,存在很大程度的衰减,所以假定最终噪声电压为1mV。设定光斑落在PSD面上某点处总光电流为10μA,则四个输出端电流I1为 3μA,I2为1μA,I3为2μA,I4为4μA,经最终放大处理,电压分别为3V,1V,2V,4V,则位置偏移量为:
在不考虑噪声造成误差情况下,光斑落点的位置偏移量X=2mm;但由于噪声存在,对位置偏移量产生一定的误差,其结果X′=1.99mm。
噪声引起的误差偏移量:δs=X- X′=0.01mm,根据式(2)换算成角度为0.06o。
综合以上PSD精度误差,装配误差和噪声误差共同引起系统的测量精度:
一般用于简易弹道修正的弹丸俯仰和偏航角度测量误差要求不大于1o。而基于光电位置传感器的弹丸俯仰和偏航角度测量误差为0.60o。这一精度满足弹道修正对弹丸姿态测量精度的要求。
利用光电位置传感器PSD一种组件同时实现弹道偏差和弹体姿态两种功能,将光电编码传感器与惯性测量组件分别实现的功能集为一体大大减小体积,另外光电位置传感器PSD为通用化商用器件,比起专门研制、成本较高的惯性光性测量组件,可大大降低成本。
4 结论
本文提出了基于光电位置传感器的弹道偏航与姿态测量方法,该方法利用光电位置传感器PSD代替传统光电编码传感器完成弹道偏差测量,光电位置传感器还根据激光光斑在光电位置传感器上的位置代替传统惯性测量组件判断偏航角、俯仰角。同时实现弹丸弹道偏航与姿态角测量两种功能。精度评价分析表明,该方法测量弹丸俯仰和偏航角度精度高,理论精度为0.6°,满足弹道高精度修正引信对体丸姿态测量误差不大于1°的要求,同时具有体积小,成本低的优点。拟在小口径弹药的激光驾束制导中使用该方法。
[1]马利国,伍波,周鼎富,等.10.6μm激光驾束制导仪编码调制器的设计[J].红外与激光工程,2010(1):71-75.
[2]张会素.基于PSD技术精度靶测试方法研究[D].西安:西安工业大学,2014.
[3]冀伟.激光束位置及角度偏差测量系统[D].长春:长春理工大学,2009.
[4]牟丽娜.基于PSD的位移检测系统设计[D].太原:中北大学,2007.
[5]朱国力,吴学兵,邹万军.基于PSD的角度测量系统[J].电测与仪表,2006(1):29-32.
[6]安毓英,曾晓东,冯喆珺.光电探测与信号处理[M].北京:科学出版社,2010:128-135.
[7]江孝国,李洪,杨兴林,等.位置敏感探测器测量电路噪声分析[J].信息与电子工程,2010,8(1):97-98.
[8]JeraldGraeme.光电二极管及其放大电路设计[M].赖康生,许祖茂,王晓旭,译.北京:科学出版社,2012:89-109.
[9]梁志剑,马铁华,范锦彪,等.飞行体姿态惯性测量技术综述[J].探测与控制学报,2010,32(5):11-15.
Ballistic Yaw and Attitude Measurement Based On PSD
HOU Wanggao,CHEN Zuntian,CUI Jinglin
(Science and Technology on Electromechanical Dynamic Control Laboratory,Xi’an 710065,China)
In view of the large volume,high cost and complexity of the traditional laser beam riding guidance trajectory and yaw attitude measurement to inertial measurement unit,a ballistic yaw and attitude angle measurement method based on PSD was put forward.The method of using PSD instead of traditional photoelectric coding sensor could complete ballistic measurement deviation, the location of the laser spot based on PSD replaced the traditional inertial measurement component judgment yaw angle and pitching Angle. At the same time, the measurement of projectile trajectory and attitude angle was realized. The measurement accuracy evaluation analysis showed that the proposed method of measuring projectile yaw angle and pitching angle measurement accuracy could reach 0.60°, which meet the application requirements of small caliber grenade trajectory correction.
laser-beam riding guidance; ballistic correction;PSD; projectile attitude measurement
2016-11-15
侯望高(1992—),男,陕西西安人,硕士研究生,研究方向:机械电子工程。E-mail:1002311783@qq.com。
TJ765
A
1008-1194(2017)02-0049-05
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
商界评论(2022年1期)2022-04-13
数字海洋与水下攻防(2020年5期)2021-01-04
学生天地(2020年6期)2020-08-25
学生天地(2020年3期)2020-08-25
电子制作(2019年7期)2019-04-25
汽车观察(2018年9期)2018-10-23
草原(2018年2期)2018-03-02
北京航空航天大学学报(2017年6期)2017-11-23
诗选刊(2015年4期)2015-10-26
